農業機械学会誌63(5):80~85,2001
研究論文
RTK-GPSとFOGを使用したほ場作業ロボット(第2紗
一一作業計画マップによるほ場作業の自律化
木瀬道夫*'・野口伸*'・石井一暢窯'・寺尾日出男*’
要
ヒー
ロ
ロボットトラクタが通年でほ場作業を行うには,作業に応じて経路,走行速度,PTO,3点ピッチの操
作などを設定・変更しなくてはならない。このような軌道生成と作業計画の2つの問題を解決するため
に,経路情報のみならずPTOのオン・オフ,変速段数などのロボットへのコマンド情報を含んだ,「作業
計画マップ」を考案した。
開発したシステムはナビゲーションセンサにRTK-GPSと光ファイバージャイロスコープ(FiberOp‐
ticalGyroscope;FOG)を採用した。無人ロータリ耕うん作業を行った結果,1.5m/sの作業速度で目標
経路からの偏差が6cm(rm.s・値)で作業することができた。
キーワードユ作業計画マップ,(急場作業ロ宗ツト,RTK-GPS,FOG
FieldMobileRobotnavigatedbyRTK-GPSandFOG(Part2)*
Autonomousoperationbyapplyingnavigationmap-
MichioKISEM,NoboruNOGUCHI*',KazunobulSHII鑿1,HideoTERAO*’
Abstract
AnAutonomoustractorthatisabletoutilizeforalltypeofoperationsonficldsrequirestravel
inarelativelywidespeedrange,andhastohaveamissionplannerthatcontrolsPTO,transmis‐
sion,andenginespeedaswellaspathplannenlnthispaper,theNavigationmap,whichhasnot
onlydesiredpathbutalsosettingsofPTO,transmission,enginespeed,andotherfunctionsas
commandstothetractorwasinventedinordertoworkoutbothproblemsofoperationplanning
andpathcontroL
ThedevelopedsvstemadoptedanRTK-GPSandaFOGasnavigationsensorsltcould
autonomouslyperformrotarytillagewith6cmerrorfromscheduledpathatL5m/sbyapplying
thenavigationmap.
[Keywords]Navigationmap,autonomoustractorRTK-GPS,FOG
》畑
I緒
本研究は畑作・水田作・粗飼料生産におけるすべての
トラクタ作業に対応できる汎用性の高いほ場作業ロボッ
トの開発が最終目的である。既に農用移動ロボットの研
*2000年4月第59回農業機械学会年次大会(新潟大学)にて
-部講演
*l会員,北海道大学大学院農学研究科(〒060-8589札幌市北区北
9条西9丁目TELOll-706-3884)
GraduateSchoolofAgriculture,HokkaidoUniversity,Kita‐
9,Nishi-9,Kita-ku,Sapporo,Japan’060-8589
究開発は国内外を問わず盛んに行われてきた。幾つか例
を挙げると,行本らnによる耕うんロボットの開発,井
上ら2)によるGPSとジャイロのセンサフュージョン,
長坂ら3)による自動走行田植機の開発などがある。行本
らの耕うんロボットはナビゲーションセンサに自動追尾
式トータルステーションと地磁気方位センサを用いて,
矩形区画のほ場をロータリ耕うんするものであり,ほ場
の区画データをロボットに与えることによって自ら経路
計画を行い,往復耕と回り耕を行うシステムである。こ
れらの作業を0.5m/sの走行速度,目標経路に対して5
木瀬・野口・石プ|:・寺尾:RTK-GPSとFOGを使用したほ場作業ロボット(第2報)
81
cm以下の誤差で走行できる自律走行システムである=
井上らのシステムはDGPSと光ファイバージャイロの
霞測データにカルマンフィルタを通11]してil1ll位精度の向
上を図り,目標経路に対して10cm以下の誤差でロータ
リ圧復耕を実現している。反坂らはRTK-GPSとFOG
を航法センサにH1い,水田というiilI進性の維持が困難で
あるほ場において.目標直線経路からの偏差が10cm以
下と高い直進'性を有した'二|動走行''''1111機を開発した。こ
の他にもマシンビジョンによる作物列追従')や,草地
における自動走行車両の開発月〕などの試みがなされてい
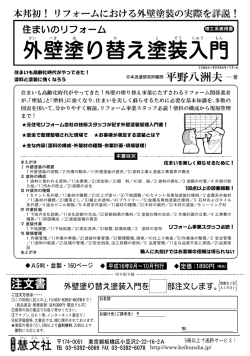
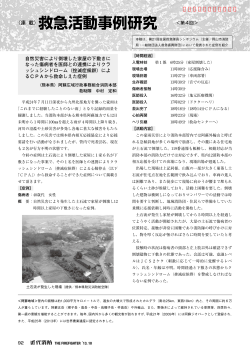
反|]lLlrMl業システム概略図
FigⅢSchem〔IticdiagriII1]ofthero1)otsystem
る戸
しかしこれらのロボット・目(11走行ZlrlTliiはいずれもあ
度(最大,もしくは手釛設定値の2段階).PTOのオ
る特定の作業を対象に開発されたものであり,このまま
ン・オフ,ブレーキのオン・オフがコンピュータでコン
他の作業に転用することは困難である。例えばロータリ
耕うんは区画を塗りつぶせばどのような径路を走行しよ
うとも基本的に自由であるが,薬剤散布作業など作物列
が存在する作業では作物列によって走行経路が制限され
トロール可能である。またこれらの制御項目はすべて観
測でき,その他にミッション油圧異常の警告,燃料が
13%以下になると残量警告を発することができる≦さら
に安全対策として車体外部にエンジン非常停止ボタンを
る.目標経路の生成のみならず,走行速度,3点リンク
配し,またリモコンでもエンジンを停止することができ
ヒッチやPTOの操作も作業に合わせて設定・変更する
る。これらの機能はトラクタに搭載された車両コント
必要があり,耕うんロボットをそのまま薬剤散布作業に
ローラが制御する。ll1l1hiコントローラはCAN-BCS'に
適用することはできない。逆にマシンビジョンを用いた
よって外部機器と通信されるため,制御コンピュータだ
ナビゲーションシステムを作物ダ|]のない耕うんや播種な
けでなく,他のECUによっても制御することができる。
どの作業に適用できないことは「lIU1である。
2.航法センサ
そこで本研究は作業の種類ごとに[|標経路や変速段
RTK-GPSには()株)トリンブル製卯1s750を採用した。
数などの情報を持つ,「作業計山マップ」をGIS〔;)によっ
MS750の計il1ll精度は2cm、サンプリング周波数は20
て作成することによって,軌道と|{成と作業司I11Llの2つの
Hzである。RTK-GPSで取得したデータは,緯度,経
問題を解決することを試みた。’二1標経路を点列を11]いて
度シ位置データの質(得られた解がFIX解(リアルタイ
表現し,それぞれの点に変速段数や3点リンクヒッチ,
ムキネマティックiH'|位による解)かどうかを表わす),走
PTO操作などを属'性として付加することで,作業計画
行速度である。
マップの変更によって様々な作業を行うことを可能にし
GPSから得られた位置情報はWGS-848)系の緯度・
た。さらに目標経路が点列で構成されていることから,
経度で表されるため,恒両制御に利用するためにはこれ
曲がった経路を表現することも可能である。これによ
らを距離系座標に変換する必要がある。本研究では緯
り,矩形ほ場以外での作業や格納I1li-Iま場間の移動など
度・経度座標をNIMA(NationallmageryandMapp‐
任意経路の走行も可能となる。また播種時の走行軌跡を
ingAgency)によって定義されたCTM(Universal
次回以降の目標経路とすることによって,さらに精度の
TransverseMercalorGrid)ヨ)に変換することで、単位
高い自律走行も実現できる。本研究では開発したシステ
によって:表現された絶対座標を得た。UTMではメルカ
ムのアルゴリズムと無人耕うん作業の結果について報告
トル図法に基づいて平而に投影された世界地図を,緯度
方向に8度経度方向に6度のグリッドに分割し,それ
する。
Ⅱ自律作業システム
ぞれのグリッド『'1位で座標変換を行う。
車両方位の計il1llにはFOG(JAE,JG-35FD)を採用し
1.システム構成
た。JG35-FDは時'''1ドリフト(15./h,0.01二の分解能で
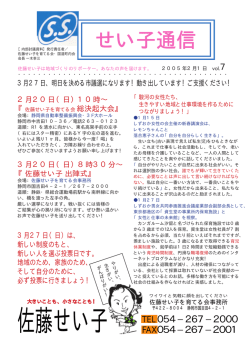
図1に本研究で構築した自律作業システムの概略を示
車両の相対方位を計il1'|することができる。
した。自律作業システムはロボットトラクタ,航法セン
またGPSアンテナをキャビンヒ部に取りつけたこと
サであるRTK-GPSとFOG,傾斜lWi正用の姿勢角計測
からGPSデータの傾斜補正を行う必要かある'''1唇この
センサIMC,さらにこれらを統括する制御コンピュー
ため姿勢角装置IMU(JAEJCS-7401A)をキャビン内
タによって構成されるc
部に装着したc
ロボットトラクタは市販車((株)クボタMD77)を
ベースに(株)クポタがロボット車ITIji用に改造を加えたも
lll作業計画マップとロボット制御アルゴリズム
のである。制御項目として,操舵,iiii進・停止・後退の
1.作業計画マップの構成
切り替え,変速,3点リンクヒッチの昇降,スロットル開
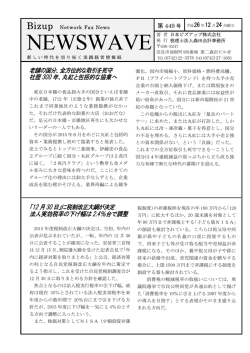
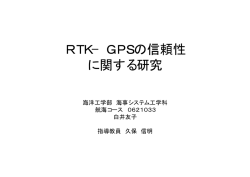
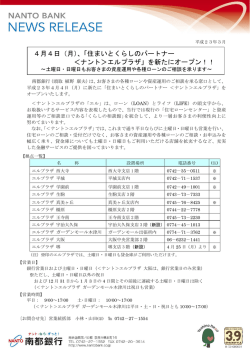
図2に作業計画マップの,概念図を示した。作業計画
農業機械学会誌第63巻第5号(2001)
82
ピゲーションポイント
●
codeの内■
●
3
“
区間
作 巣区間
7
ラTnPlU【
PTOPTOのオン・オフ
0
声蓮田使月ヨ声迺■
4
●
■
鶴彊瀞認)
蹄
、
作栗状皿
(作乗中,
行程番号ポイントカ咽する行租の缶 号
エンジン回転数丘大値か手動放定lE
--111鶏:詩
0
●
作乗状伍
個
●
[・]ハごapqH
名三一一コ
●
●
●
43.0748
項目脱明
IF
or
●
●
43.075
/:; =OIA,/゜",,c・血,)
(ら
ロ
●
IDngtudc3点リンクヒツチピッチの上下位矼
ナビゲーションマップ
43.0742
図2作業計画マップ概念図
Fig2ConceptofNavigationmap
マップは3次元ユークリッド空間E3の部分集合Qとし
て定義される。
Q={助|(CieE3,0<i<」v}(1)
43.074
141.3352141.3356141.336l4L3364
Longituder]
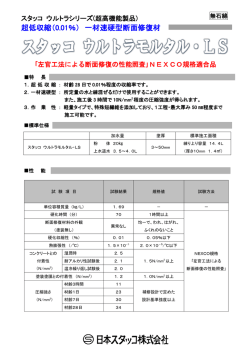
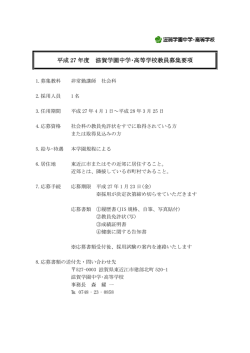
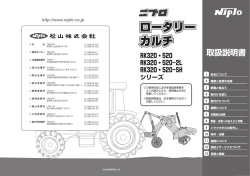
図3耕うん作業の作業計画マップ
Fig3ANavigationmapforautonomousrotarvtillage
ただしCUi=(JaA,Jwzj,CO`ei)は緯度,経度,コードを
要素とする点であり,またNはその個数である。
コードは64ビット整数で表わされる。コードには図
中の表に示される6種類のデータがビット単位で記号化
されている。・作業状態,行程番号といった作業内容に関
センサフュージョン初期化
一一
する情報は旋回位置の検出と作業計画マップの抽出に用
いられている。またスロットル開度,変速段,PTO,3点
作業計画マップ抽出’
二可云壹扇下=
計測
ピッチはロボットへの動作命令を表わし作業に応じて
これらを設定・変更することで多様な作業に対応でき
車両 停止
る。
作業計画マップの生成法は2つの方法がある。一つは
GISソフトウェアを用いる手法である。これはほ場に作
業幅に応じて平行な経路をコンピュータ上で生成するこ
とによって行う。本手法は耕うん,施肥,播種・移植な
Yes
方.操
絶対
もう一つは実際の走行軌跡を目標経路とする方法であ
る。播種以降の作業は播種時の軌跡を記録して作業計画
Close
CIosegtPoint
ロボットを使用する場合にも有効である。
れるナビゲーションポイントのコードの作業状態データ
コード の
NC
亟瘤
の
の検索
ことができる。また播種を有人で行い,その後の作業に
ぞれの行程の始点から7m,終点から7mの部分に含ま
舵
幽祠
マップとすることで,さらに精度の高い目標経路を得る
耕うん作業である。本図からも明らかなように,作業計
画マップには旋回のための目標経路が存在しない。それ
NC
両
両停止中?
車両莞 進
どの目標経路があらかじめ存在しない作業時に使う。
図3に耕うん作業用に生成した作業計画マップを示し
た。一番右が第一経路であり,全部で4行程のロータリ
し晦職 乢螂
RX?
2.作業計画マップの生成
T了う>』(2
行程終了?
S
#塑」
、NC
旋回?
NC
廻旦塗エードーマ扇
行程終了?
には旋回を表わすフラグが記号化されており,この旋回
フラグを復号したときロボットは旋回ルーチンに移行す
る。本作業計画マップは自作したGISソフトウェアに
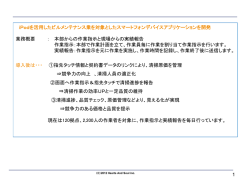
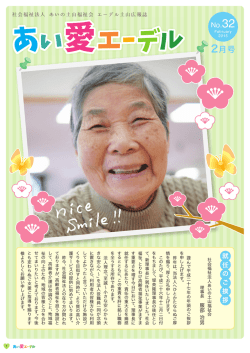
図4マップベースガイダンスのフローチャート
よって生成した。これは第1行程の始点と終点を与える
後,外部I/Oスイッチの合図によりロボットは発進す
ことによって,その経路に等間隔で平行な経路を生成す
る。ロボット発進後すぐにセンサフュージョンのための
ることができる.
初期化を行う。これは本研究がRTK-GPSとFOGのセ
Fig4Flowchartofmapbaseguidance
3.自律作業アルゴリズム
ンサフュージョンによって絶対方位を算出しているため
図4に本システムによる自律作業のフローチャートを
である。この手法については第1報で既述した。次にこ
示した。作業計画マップや作業内容の初期設定を行った
れから作業する行程の作業計画マップを,全行程作業計
木瀬・野口・石井・寺尾:RTK-GPSとFOGを使用したほ場作業ロボット(第2報)
画マップから抽出する。その後制御ルーチンに移行す
る。RTK-GPSとFOGによって車両位置と相対方位を
計測する。このときRTK-GPSから高精度測位を表わす
F'X解が得られなければ、ロボットはF,X解が得られ
るまで作業を停止する。F,X解が得られれば車両の絶対
方位を算出し,後述の方法により目標操舵角を決定,操
舵を行う。次に作業計画マップQの巾から現在位置に最
も近いナビゲーションポイント(C1osestPoint)を:検索
する。そのナビゲーションポイントのコードを復号し
復号されたデータに基づいて変速段数,3点リンクの操
作などロボットの動作を決定する。さらに現行程の終端
位置に到達したかどうかを作業状態フラグによって
チェックする。現行程の終了ならば,総行程数と比較し
て全行程を完了したかどうかを調べる。次行程のある場
合は旋回動作に,全行程を完了した場合はロボットは停
止,作業を終了する。
83
1V
“芒1={⑪ザ|艸(|`Uドーワ||ルザニQ鑿,`J津`・(;'}(4)
ただし1.||はベクトルのノルムを表わす。
すると閉空間[u)a,Cu団は以下の式で表わされる。
[CJ8,,⑩82]={ごヒース①8,+(1-ス)①&’
0ニスニLrEE2}(5)
ここでとは①:]と①:2問の内分点を表わす。以上から横
方向偏差dは以下の式で求められる。
α=min{|ヒーワ||}(6)
kjfu,`jf糊]
2)方位偏差
方位偏差△①はH標方位と車両の絶対方位の差で定義
され
△。=。-の‘(7)
で与えられる。よって△のを得るためにはまずロボット
の目標方位の。を求めなくてはならない。今作業計画
マップの方向が①:→LUZ2にあると仮定する。式(6)を満
4.ステアリングコントローラ
車両の操舵制御において、操舵角を目標径路に対する
車両の横方向偏差と方位偏差の関数として表わすことが
一般的であるⅡ)。以下に本研究における横方向偏差と方
位偏差の定義とその算出アルゴリズムについて記述す
る。
たすどをこ'…とし,さらに制御パラメータとなる前方
注視距離Lをある既知量として導入して,以下の2式を
満たすナビゲーションポイント①漣Q*から検索する。
L,=||⑳t懲一`…||+±||②ナー⑳M|≦し(8)
j妄。+I
L2=ⅢH〃"J'十螢||`0Mき,|ごL(9)
1)横方向偏差
先に定義したナビゲーションポイント①,から,コー
ド(code『)を省いた⑩ヅー(lali,/0,町)をfLl定義し2次元
ユークリッド空間E2の部分集合である作業計画マップ
Q*を以下のように定義する。
Q拳=(①了①?=E`'0<i<』V}(2)
図5にステアリングコントローラのアルゴリズムを示
した。本図はRTK-GPSによるUTM座標系であり,Y
軸方向が北を指している。のはY軸に対するロボットの
絶対方位,。‘は目標方位,そして。,△。がそれぞれ本
研究で定義する横方向偏差と方位偏差である。
現在のロボットの位置ベクトルを刀EE2とすると,刀
からQ案の中の最も近い点u):!と次に近い点CUZ2は以下
のように求められる。
⑭t,=(のブ'mli,(|,"r-刀||地にQ鯵}(3)
i=1
ノーC2+l
すると2点LUjfとLuハを結ぶ線分」この位置ベクトルEの
動く範囲は,以下の式で表わされるE2の部分空間三と
なる。
己={ElfE圧,ビースCu汗(1-1m向,’0ニス≦l)(1O
ここで△L=L-Llとおくと,以下の式を満たすベクト
ル員二二が,前方注視距離Lを考慮した目標点である。
|晶一Lqj11|=△L(11)
したがって、’三|標方位のばば,
…=(荒告f」噸
…蔦-((詣芋}’Ⅷ
ただし。'はY軸方向の単位ベクトルである。
以上から方位偏差“は式(7)によって求めることがで
きる。
3)操舵角
操舵角6は横方lt1Iliiii差αと方位偏差△○を用いて以下
Nonh
の式によって決定される。
y
6=α,。+QgAd(M)
ここで,α”α2は制御ゲインである。L,α,,α2を走行
OPmI[MmnnbDT
速度別に適したルックアップテーブルを用意すること
で,様々な作業速度に対応できるようにした。今回は1.5
m/s(作業中)と0.2m/s(旋回後の幅寄せ)の2つの走
X
図5ステアリングコントローラのアルゴリズム
Fig.5Algorithmofthestceringcontroller
行速度に対して,それぞれ,L,α,,α2の組を用意した。
これらの値は走行試験によって試行錯誤的に決定した。
本手法は従来の手法とは異なり,逐次目標点を更新す
農業機械学会誌第63巻第5号(2001)
84
6
43.0748
step2
Stepl
43.0746
 ̄
。
::000:0::。00::。068,8
ユ)
で
己
圖43.07“
43.0742
43.074
141.3354141.3358l413362
Longitude[。]
図7耕うん作業走行軌跡
m
『ノ
Ⅶ
ホ‐lI--I-土
7
這且ご●揖盟〕ご旨⑪ト曰U
….………………’i
s且つ:8つ:庭
step3
 ̄
Fig7Aguidancetrajectoryofautonomousrotarv
tillage
図6旋回アルゴリズム
Fig6Turningalgorithm
5.旋回アルゴリズム
図6に旋回アルゴリズムを示した。本手法は切り返し
■■
左旋回の場合を示している。旋回アルゴリズムは以下の
00
動作を有した前進と後退を併用した方式であり,本図は
-00
る。
50521012
目標経路が直線でなくても操舵角を計算することができ
・}』C■□唾c一℃8霞[員]【『。旨』シロつ一旬』。】3
ることによって目標方位を修正しながら走行するため,
’八
-- ̄
==
 ̄
ニーニー:--ノミ-.--
し、_ノJv~v、ヘヘ/'二V〕、ハニヱZ二一三三
、
_=当=
- ̄---
/、囚一へ_=竜一三
~--'---、■'==
ニーーヱ庁一一一一
OIO203040
506070
T1avビltinlC[sec]
3つのステップで構成される。
1)旋回速度まで減速し,7m戒進したあと最大舵角
 ̄
一一一
図8自律耕うん作業|}寺の横方向偏差と方位偏差
Fig.8AIatcraldeviationandaheadingerrorin
で車両方位が90度変化するまで左旋回する。
autonomousrotarytillage
2)以下の式で計算される距離後進する。
uD
6=2γ-2()
ここでγはステップ1)で観il11lされる実際の旋回半径,zc
PTOのオン・オフが作業計画通りに動作し,作業計画
は行程幅である。
マップの有効性が確認できた。
3)最大舵角で車両方位が90度変化するまで左旋回
する。
以上の3ステップで旋回行程は完了し,l)と3)の旋
図8は第3行程における旋回終了直後からの横方向偏
差と方位偏差の推移である。横軸が走行時間,縦軸が偏
差であり,着色部分は作業中であることを表わす。旋回
回半径が等しければ理論上は旋回終了位置が次行程の目
終了直後の偏差は]8cmと大きい。この偏差は作業を開
標経路上の点となる。本方式では実際の旋回半径を再計
始する7m地点までに完全には収束せず,作業開始地点
算し,後退距離を路面変化に応じて修正している。これ
で8cmの偏差が存在した。しかしその後は偏差が収束
により,傾斜や路面状態による最小旋回半径の空間的変
し安定して走行できた。また車両方位偏差は旋回終了
化を補籔債できる。さらに作業終了から7m直進する間に
後100.と大きかったが,作業中のr,、.s・値は1.0゜と
目標経路に対してフィードバック制御により幅寄せを行
なった。以上のことから作業中の直進'性は維持できたこ
う。
とがわかった。
1V自律作業試験
表lに各行程の走行精度を示した。一番左の値が目標
経路に対する車両の横方向偏差のr、、.s・値,2列目がそ
北海道大学農学部附属農場において,図3で示した作
の最大値,3列目が目標経路に対する車両の方位偏差の
業計画マップを適用した無人ロータリ耕うん作業を行っ
rm.s、値を表わしている。これらは旋回後7mを除いた
た。その作業軌跡を図7に示した。このとき設定走行速
作業中の値を用いて算出した。横方向偏差に関してどの
度は汀作業中が1.5m/s,旋回中が0.2m/sとし,これら
行程もrm.s・で8cm以下の偏差で走行した。これは従
の速度変更は作業計画マップに基づく変速と機関回転数
来の有人耕うん作業と比較しても遜色ない精度である。
の制御によって実現される。本図から的確な位置で旋回
方位偏差に関してもrms・で20.以下で走行することが
を行ったことが分かる。また変速や作業機の昇降,
でき,高い直進性を得た。しかし横方向偏差の最大値は
木瀬・野口・石井・寺尾:RTK-GPSとFOGを使用したほ場作業ロボット(第2報)
表l自律耕うん作業走行結果
路からの偏差がr・ms・値6cmと高い直進'性を得た。し
TablelResultsoIautonomousrotarytillage
Path#
rnLs、of
mteral
deviation
に、。
hcadingerror
[cm]
●●●●
I111
15
r]
2009
111
87,
6
rm.s,of
2485
1234
Total
Maximllm
latcrml
deviation
85
1.3
かし旋回終了後の偏差が大きく,作業開始までにこの偏
差を収束させることができなかった。この問題を解決す
るには,オンラインで幅寄せ経路を生成するといった新
たな旋回法,’幅寄せ法を考案する必要がある。
参考文献
])Yukumoto,0,11atsuo,Y、:Navigationtechnologyfor
tillingrob()1s,Proceedingofmobilelnt、symposiumon
ilgriculuIrKIIBus-syslemLBSandPA,59-94,1997
2)井上慶一,大塚寛治,杉本光穂,村上則幸,黎文:自律
すべて作業開始地点で記録されたものであり.図8で明
らかとなった旋回とその後の幅寄せの精度の問題を裏づ
ける結果がここでも得られた。
本試験はロータリ耕うん作業の速度としては速い1.5
m/sに設定した。これは本システムが耕うん以外の農作
業にも応用できる可能性を示すものである。
V摘要
本研究は畑作・水田作・粗飼料生産作業におけるすべ
てのトラクタ作業に対応できる汎用性の高いほ場作業ロ
ボットシステムの開発を最終目的としたC
l)航法センサとしてRTK-GPSとFOGを用いた。
また供試ロボットトラクタはほとんどの機能をコン
ピュータで制御することができる。
2) ̄作業計iiliiマップ」と呼ぶ||標経路や変速段数な
どの情報を持つ作業マップをGISによって作成した。こ
のシステムによって異なった作業に対しても対応できる
と考えられる。
3)作業計画マップは緯度,経度,コードを要素とす
るナビゲーションポイントの集合で構成される。コード
には各ナビゲーションポイントにおけるエンジン回転
数,変速段,PTO,ピッチ操作といったロボットへの動
作命令や,行程番号などの作業内容に関する情報が記号
化されている。
4)構築したシステムの検証実験を行った。ロータリ
耕うん作業を行った結果、1.5m/sの作業速度で目標経
走行のためのGPSとジャイロのカルマンフィルタによるセ
ンサフユージヨン技術(第1報),農機誌61(4),103-114,
’999
3)長坂善禎,谷脇篝,大谷隆二,飯田一人,佐々木泰弘:自
動走行田械機の開発(第1報),農機誌61(6),179-186,1999
4)Pinto,F、,Reid,LHeadingang]eandoffsetdetermina‐
lionusingI〕rincipalcomponelltaI1alysis,1998America】1
SocietvofAgriculluralEngineersMeeting,PaperNo.
983113,1998
5)木瀬道夫,野l」伸,石)'二‐暢,寺尾日出男:DGPSを利用
した農用移動ロボットのナビゲーション,農機誌62(6),145-
153,2000
6)碓井照子:GISの現状と農学の課題,システム農学会誌16
(2),89-96,2000
7)FreimaI1n,R、:AutonavigationandlmpIememtCont‐
rolledProcessAutomationonlSO-CANBasis,Proceed-
ingsofElectronicFarmCommllnicationwithLBS,65-87.
2000
8)NationallmageryandMappingAgency(NIMA):De
partmentofDefenseWorldGeodeticSysteml984,NIMA
TechnicalReportTR83502ThirdEdition,2000
9)DefenseMapl)ingAgency(DMA):TheuI1iversalgrids:
Universa]TransverseMercatorにTM)andUniversal
PolarStereographic(UPSLDMATechnicalManual
DMATM8358.2,1989
10)水島晃,野口伸,石井一暢,寺尾日出男;自律走行Zli両
のGPS位置計測に関わる傾斜補正,農機誌62(4),146-153,
2000
11)行本修,松尾1湯介,野口伸,鈴木正肚:耕うんロボット
システムの開発,農業機械学会誌,60(4),29-36,1998
(原稿受理:2001年6月1日・質問期限:2001年11月30
日)
© Copyright 2026 Paperzz