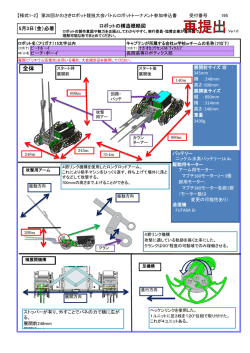
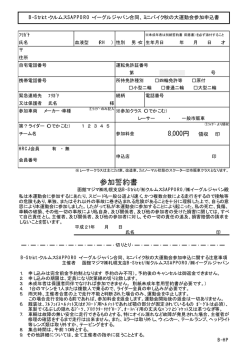
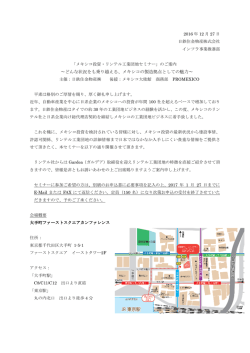
10 【様式1-2】 第21回かわさきロボット競技大会 バトル部門 構造概略図 受付番号 5月23日(金)必着 ロボットの構造概略図 ロボット名 Ver1.0 ロボットの製作意図や魅力を企画としてわかりやすく、実行委員・協賛企業が短時間で 理解可能な形でまとめてください。 ロボット名(フリガナ)15文字以内 (フリガナ) 添付あり キャプテンが所属する会社or学校orチームの名称(フリガナ) ゴーストフレイム スリヴァー 靈焔 裂片妖 (フリガナ) アオイヤ 葵屋 すでに提出しているエントリーシートと同じ事 電源に「リチウム系電池」を用いる場合、大会規定品を使用してください。 高さ 680mm ●ロボットの仕様 (戦闘時) 全長:680mm 全幅:348mm 全高:123mm ●変形機構: 動力:RS-380PHモータ2コ 出力を台形ねじに伝えスライダーリンクにて 後記アーム先端の高さを上下調整する変形機構。 ※機体の変形機構でありアームではない。 (スタート時) 全長:245mm 全幅:348mm 全高:680mm アームを立てる ●アームの仕様 動力:RS-380PHモータ6コ 本数:2本 機構:横回転アーム アーム機構説明: 比較的高速に横回転するアーム アームの回転直径は220mmでアームの規定を満たす。 最終減速後に動力をスライダー揺動リンクで出力軸に伝え アームを横回転させる。 (共通) 重さ:3450g 電源: ニッケル水素電池or タミヤ製LFバッテリー LF2200-6.6V 無線システム: 公式指定送受信機 ●脚の仕様 動力:RS-380PHモータ2コ 本数:3本×4カ所=12本 機構:TADANOヘッケンリンク 脚機構説明: 往復で高低差のある揺動運動をすることで 歩幅をもった歩行を行います。 脚の裏にはゴムを取り付けリングを傷つけません。 変形機構解説 台形ねじでナットを前後し 変形する 全長 686mm 横幅 348mm 全長 スタート時の姿勢とサイズ 245mm 横回転アーム解説 高さ 123mm 横回転出力軸 横幅 348mm 図中緑の揺動スライダーリンクが 揺動運動をしながら動力を出力するぞ! 回転半径110mmの横回転するアーム 戦闘時の姿勢とサイズ 脚機構解説: TADANOヘッケンリンク機構により 高低差のある揺動運動で 歩幅を持って歩行するぞ! ※大会中の衝立は これでお願いします 裂靈 片焔 妖
© Copyright 2026 Paperzz