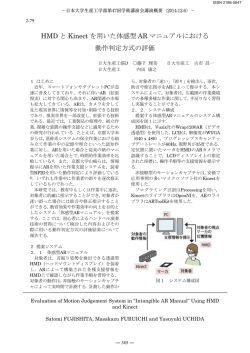
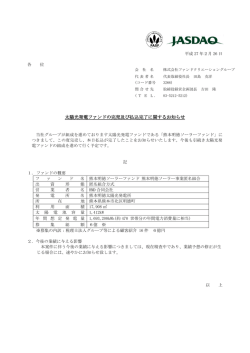
無人ヘリコプタの没入型遠隔操縦システムの開発 - シミュレータと実機による有効性の検証 Development of Immersive Teleoperating System for Unmanned Helicopter - System Verification Using Simulator ○ 小枝 正直,松本 吉央, 小笠原 司 (奈良先端大) Masanao Koeda, Yoshio Matsumoto, and Tsukasa Ogasawara (Nara Institute of Science and Technology) Abstract: Recently unmanned helicopters are used in various situations such as cropdusting and remote sensing. However it is difficult for an operator to control an unmanned helicopter remotely. One reason is that an operator can not know the attitude of a helicopter intuitively. In this paper, we propose a new immersive teleoperating system of an unmanned helicopter. An operator controls a helicopter remotely while watching the surrounding views of the helicopter through a HMD. This system enables an operator to fly an unmanned helicopter easily and intuitively. Using flight simulator, We verify ease of operation when this system is used. Key Word: Unmanned Helicopter, Teleoperating, Omnidirectional Camera, Flight Simulator 1 はじめに 無人ヘリコプタは現在,農薬散布や航空写真の撮影などに 用いられており,実社会において活躍している 3) .しかし 無人ヘリコプタの操縦は,操縦者が機体の姿勢や状態を把 握しにくいために非常に難しい.そこで自律飛行の研究が 行われている 1) が,多数のセンサや制御装置を機体に搭載 する必要があるため,大型で高価なシステムになってしま う.またタスクを行う際には飛行経路や目標地点などを予 め設定する必要があるが,災害現場などの状況が刻々と変 化するような現場では,それらを予め設定することはでき ないため,使用が困難である. そこで,これらの問題を解決するために本研究では没入型 遠隔操縦システムを提案する.本稿では本システムの有効 性を検証するために,フライトシミュレータを用いて被験 者実験を行い,通常の無人ヘリコプタの操縦より容易に操 縦できることを確認した.また実際に本システムの開発を 行い,その実現性を確認した. 2 没入型遠隔操縦システム 実機のヘリコプタを操縦する場合には,操縦者は機体に搭 乗して操縦を行う.そのため操縦者の座標系と機体の座標 系は飛行中には変化しないので,その操縦は容易である.し かし無人ヘリコプタの一般的な操縦では,操縦者自身はあ Helicopter Camera Transmitter Control Image Display Helicopter HMD with Gyro sensor Receiver PC Fig.2 : Developed Immersive Teleoperating System まり移動することなく地上からヘリコプタを操縦する.そ のため操縦者-機体間の座標系が大きく変化してしまう.ま た操縦者と機体との距離が大きく離れた場合には,操縦者 は機体を目視すること困難になり,機体の姿勢が判別しに くくなる.これらが無人ヘリコプタの操縦を困難にしてい る原因である. そこで本研究では没入型テレオペレーションシステムを提 案する.これは無人の航空機にカメラを搭載して,得られ た画像を無線により地上に送信する.地上では上空からの 画像を受信し,没入型ディスプレイに表示する.操縦者は そのディスプレイを見て操縦を行う.操縦者は機体に搭載 されたカメラからの画像を見ながら操縦することで,飛行 中においても操縦者の視点は機体座標系に固定される.こ れにより,比較的容易に無人ヘリコプタの操縦が可能にな ると考えられる.また本手法では操縦者から機体が目視で きない場合でも,機体から送信された画像が HMD に映っ ている限り,飛行を続けることができる.さらに,機体へ 搭載する機器が少ないので小型の機体を用いることができ, 安価にシステムの構築ができるという利点もある. 3 Receiver Controller Operator Fig.1 : System Overview Transmitter Omnidirectional Camera 開発した没入型遠隔操縦システム 本研究で開発したシステムの全体図を Fig.2に示す.ヘリ コプタ本体の底面に双曲面鏡を持つ全方位カメラと画像送 信用のトランスミッタを搭載している.カメラより得られ た全方位画像はトランスミッタにより送信し,地上のレシー Table 1 : Result of Experiment using Flight Simulator Display VGA Output Gyro Sensor Time [s] Video Output DSC Joystick Port B 169 56 84 54 Subject C 161 41 D E 67 54 96 55 Distance N 170.4 190.3 307.2 41.0 82.6 [m] I 49.1 68.1 43.6 43.1 84.1 ※ N:Normal flight mode I:Immersion flight Mode HMD Serial Port N I A Controller JOYpro PC Fig.3 : Simulator System Landing Point Obstacle Takeoff Point Fig.5 : Control an Unmmand Helicopter using Developed System Operator Fig.4 : Objects Allocation バで受信する.地上で受信した画像を PC に取り込み,透 視投影変換を行った後に操縦者が装着している HMD に表 示する.操縦者が装着する HMD にはジャイロセンサを取 り付け,操縦者の頭の姿勢を常に計測している.その姿勢 に応じた透視投影画像を生成することにより,操縦者は周 囲を見回すことが可能になるため,高い没入感を得ること ができる. 4 シミュレータを用いた実験 本システムの有効性を確認するために,フライトシミュ レータを用いて被験者実験を行った.本シミュレータの構 成を Fig.3に示す.操縦装置は実際の無人ヘリコプタで用い られているものを使用する.Fig.3内にある JOYpro は,操 縦装置をジョイスティックに変換するための装置である.被 験者は実際の無人ヘリコプタで用いられている操縦装置と 同じものを使用し,角度センサ付き HMD を装着した状態 で実験を行う. 本シミュレータには以下の 2 つのモードがある. • 通常操縦モード 通常の無人ヘリコプタの操縦と同 様に,機体を目視して操縦を行う.ただし操縦者自 身は移動できない. • 没入操縦モード 操縦者は HMD を装着して機体か らの画像を見ながら操縦を行う.また頭を回転させ ることで視線方向を変えることができる.しかし表 示される画像は全方位画像の展開や時間遅延を考慮 していない. このシミュレータを用い,Fig.4のように配置した障害物 を回避して離陸地点から着陸地点まで飛行するというタス クをそれぞれのモードで行い,その結果を比較した.全て の被験者 (5 人) は無人ヘリコプタの操縦の経験がない.そ こで操縦装置とヘリコプタの動きを覚えるため,各モード で 10 分程度練習した後に実験を行った. 5 シミュレータでの実験結果と考察 タスクが達成されるまでの時間と総飛行距離を比較した結 果を Table 1に示す.全ての被験者が通常の操縦より没入 状態での操縦の方がタスクを早く達成した.このことから, 没入した状態での無人ヘリコプタの操縦が通常の操縦に比 べて容易になることが示された.また総飛行距離 (離陸して から着陸するまでの経路の総和) に関しても,3 人の被験者 で短縮された.2 人の被験者で差が出なかった理由として は,着陸地点を操縦者から比較的近距離に配置したことに より,これらの被験者にはタスクが簡単であったためと考 えられる.しかし,着陸地点を操縦者から見えない程遠く に配置して実験を行った場合には,通常操縦モードでは機 体の位置及び姿勢の把握が困難で,タスク達成はほぼ不可 能になる.そのため操縦者と着陸地点を遠く離した場合の 実験は行っていないが,没入操縦モードでの優位性は明ら かである. 6 無人ヘリコプタを用いた実験と結果及び考察 実際に操縦者が HMD を装着した状態で,無人ヘリコプタ の操縦の実験を行った.先に行った予備実験において,安定 した画像送受信可能な範囲は約 80[m] 以内であることを計 測した.そこで操縦者-機体間の距離を約 10[m],機体の高 度を約 1.5[m] 程度としてホバリングを行った.実験の様子 を Fig.5に示す.機体-地上間の画像送受信,及び全方位画像 の透視投影変換に関しては問題なく動作した.しかし,現在 のところ機体自体の安定性が低いため,この実験では HMD からの画像と機体の両方を見ながら操縦を行っている. 7 おわりに 本稿では無人ヘリコプタの遠隔操縦における手法を提案し, その概要を説明した.またシミュレータを用いて実験を行 い,本システムの有効性の確認を行った.その結果,没入 した状態で操縦を行った場合には通常に操縦する場合に比 べて容易になることがわかった.また実際に没入型遠隔操 縦システムを開発して実験を行い,本システムの実現性を 確認した.今後の予定としては,全方位画像の展開と時間 遅延を考慮したシミュレータを作成し,これを用いて没入 した状態で安全に飛行するために必要な提示情報を選定を 行う.またそれらの情報を得るためのセンサと通信装置を 実機に搭載し,機体の安定性を向上させることで,HMD の画像のみでの操縦実験を行うことを考えている. 参考文献 1) 菅野 道夫: “実用化目指す空中ロボット –無人ヘリコプタ–”, 日本ロボット学会誌, Vol.18, No.7, pp.937-940, 2000. 2) 光石 衛: “テレ・オペレーション”, 日本機械学会誌, Vol.103, No.979, pp.349-351, 2000. 3) Ryan Miller, Omead Amidi, and Mark Delouis: “Arctic Test Flights of the CMU Autonomous Helicopter”, Proceeding of the Association for Unmanned Vehicle Systems International 1999.
© Copyright 2026 Paperzz