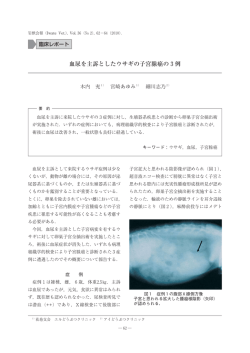
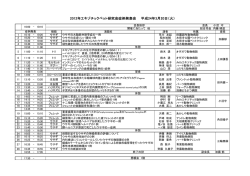
跳躍するウサギの蹠行性歩行について 2班 1.序論 栗田礼 が要求されることから,アナウサギは後肢によって ウマやイヌなど四肢動物の多くは蹄で囲まれた 強大な推進力を生み出す必要がある.また,素早く 末節骨のみを接地させて歩く蹄行(テイコウ)性や, 巣穴に逃げ込むために瞬間到達速度と最高速度が 指骨を接地させる趾行(シコウ)性の歩行を行う.一 求められ,一方で持久力はあまり問題にならない. 方,ウサギの後肢の運動形態はヒトと同じ足根骨以 ノウサギやユキウサギは森林で活動して決まっ 下を接地させる蹠行(セキコウ)性の歩行を示す 1) . た巣穴を持たないが,茂みを一時的な巣として利用 また,ウサギの歩行は跳躍を伴うが,このような歩 し,天敵に襲われた際はこの巣に逃げ込むため,瞬 行形態は他の四肢動物にはあまり見られない.その 間的な加速力はアナウサギと同様に重要である. ため,ウサギが何のためにこのような歩行を行うの また,ウサギ科は草食性の動物であるので発達し か,どのような体の構造や生態によりこの歩行が可 た消化機構を必要とする.他の代表的な草食性の動 能になっているのか,それにはどんな利点があるの 物は,反芻を行ったり,消化,吸収を行う結腸を発 かを総合的に理解することは,非常に興味深い. 達させたりすることにより繊維質の多い植物を消 生物の活動においては,まず周囲の環境に適応し 化する.ウサギはそれらに替わる機構として食糞と た生態が決定される.次に生態に適する形態に進化 いう習性を持つ.ウサギでは消化を助ける細菌が結 していき,最後にその形態で可能な運動が決定され 腸に住み着いているため,主に結腸で消化を行う. る.そこで,ここではその順序に従ってウサギの歩 しかし結腸は小腸の後ろに位置するため,結腸で消 行時の後肢の運動について考察することとする. 化された食塊はそのままでは吸収できない.そのた め消化された食塊の一部を盲腸便(軟便)として排 2.ウサギの生態についての調査 出し,体外に排出されると同時に食べてしまうこと ウサギ科は他の多くの哺乳綱に属する動物と同 で,もう一度小腸を通過させ体内に吸収する.ウサ じく,恐竜絶滅直後の第三紀始新世に出現した.漸 ギは食糞を行うことで,比較的小さい消化器官で効 新世に地球規模の乾燥化が進み,草原が拡大するの 率よく消化を行うことが可能となっている. に伴い最大の繁栄を示し,アジアや北アメリカから ヨーロッパに進出していった.第四紀更新世には現 在の全ての種が出現し,現在に至るまで体の構造は 2) 3.形態の比較・検討 歩行形態を決定する重要な因子となる骨格を図 1 大きく変化していない .ウサギ科には地下に掘ら のように模式化し,ウサギとウマに対して比較した. れた巣穴と巣穴付近の草原で生活するアナウサギ なお,比較対象にウマを選んだのは,同じ草食性で と,決まった巣穴を持たず森林の中で活動するノウ あるが別の歩行形態(蹄行性)を有するためである. サギ,ユキウサギが含まれる. アナウサギは草原の土手などの地面に巣穴を掘 図 1 のハッチングを施した部分は脊柱を示す.同 図(a),(b)を比較すると,ウサギでは脊椎湾曲が顕 って,1 日の大半を巣穴で過ごし,主に食餌の時の 腰椎 み草原に出てくる.巣穴を掘る動物は生態に応じて, 角,牙,前肢,後肢など体の様々な部分を掘削の道 具として発達させ,ウサギは前肢を用いる.巣穴を 持つことで,アナウサギは天敵に襲われた際,巣穴 に逃げ込むことができる.開けた草原では天敵に見 つかりやすいが,巣穴に逃げ込めば安全が確保でき る.掘削を可能にするため前肢にある程度の器用さ (a)ウサギ (b)ウマ 図1 骨格模式図 パに描き,それらの点を結んで後肢の軌跡を記録し た(図 2).なお,前肢を前方へ投げ出す動作は様々 な四肢動物でもあまり違いがなく,エネルギー消費 量も少ないため記録しなかった. 図 2(b)のようにウマでは腰や踵の位置はあまり 変化しない.一方,ウサギは踵を地面につけて歩行 (a)ウサギ するため踵が大きく動き,それに伴い腰も大きく上 下しており,跳躍することが読み取れる(図 2(a)). 4.2 エネルギー効率の検討 次に,エネルギー 効率を考える.ヒトでは低速の場合,走行より歩行 の方が単位距離当たりのエネルギー効率が良いが, ある程度の速度に達すると走行の方がエネルギー 効率が良くなることが知られている 3). そこで,ヒトの歩行と走行について同様にビデオ 解析を行い,それぞれの上下方向と進行方向の瞬間 (b)ウマ 図2 後肢の軌跡の比較 速度を求め比較した.走行は跳躍を伴い上下方向の 速度が大きいので,進行方向に対し上下方向の運動 エネルギーを無視できない.上下方向の運動エネル 著であるのに対し,ウマでは脊椎はまっすぐに伸び ギーは着地の際腱や筋肉に弾性エネルギーとして る.ウマは機構の発達に伴い長大になった内臓を支 蓄えられ,蹴りだす瞬間に再び運動エネルギーに変 えるために脊椎を用いており,歩行時にも脊椎が伸 換される.ウサギは跳躍に特化した体の構造を得た びた状態で肢の運動によってのみ推進力を生み出 ことで,低速歩行時の効率が悪くなった一方,極め している.一方,ウサギは脊椎を伸縮させて体幹(頭 て効率の良い高速歩行を可能にしたと考えられる. 部から尾部にかけての体の中軸)を使った歩行を行 うことで,肢の運動のみによる歩行に比べて瞬時に 6.結論 より強い力を生み出し,より広い歩幅を獲得した. (1)ウサギが蹠行性という歩行形態をとる目的は, また,ウサギでは腰椎(図 1 参照)が体の他の部分 瞬間的な加速による逃避および巣穴の掘削を可能 に比べ極めてよく発達する.強大な筋肉を持つ後肢 にすることである. を発達した腰椎に接続することで力強い後肢の運 (2)食糞の習性の獲得に伴い消化器官が縮小し,さ 動が可能になり,主に後肢の運動により跳躍を行う. らに腰椎の顕著な発達と脊椎湾曲により体幹を使 体幹を使う歩行の利点は瞬間到達速度と最高速 う歩行が可能になったため,蹠行性歩行を行える. 度が大きいことで,不利な点は持久力がないことで (3)ウサギの歩行は,跳躍を取り入れることで位置・ ある.これはウサギの生態の必要とする条件に一致 運動エネルギーを筋肉の弾性エネルギーに変換し している.歩行に体幹を利用することで,内臓を支 て保存するため,エネルギー効率の良い高速移動が える体幹の機能が一部失われるが,食糞による消化 可能である. 器官の縮小によって,内臓を支える機構としての体 幹の利用を少なくとどめていると考えられる. 参考文献 1) 加藤嘉太郎,家畜比較解剖図説,上巻,養賢堂, 4.運動の解析とエネルギーの検討 4.1 ビデオ解析 ウサギおよびその比較対象 となるウマの歩行運動の解析を行った.歩行の様子 を側面からビデオで撮影し,映像をコマ送りにして 腰,後肢の膝,踵,指先の位置をトレーシングペー pp.6-9(1988). 2) 川道武男,ウサギがはねてきた道,紀伊國屋書 店,pp.161-181(1994). 3) 東昭,生物の動きの事典,朝倉書店,pp.192207(1997).
© Copyright 2026 Paperzz