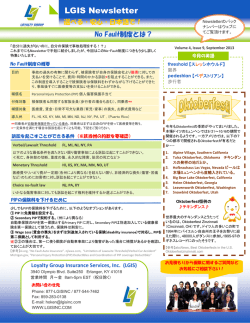
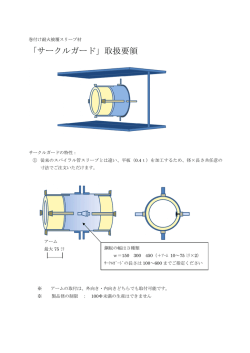
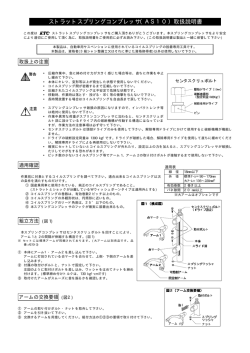
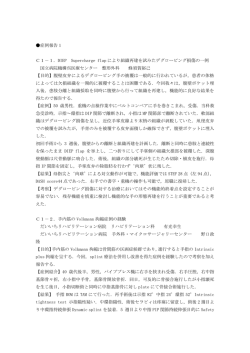
講演番号22 関節開大装具の研究開発 (装具の機構設計と関節面の運動解析) 学生氏名 1.緒 岩田岳,清水春花 指導教員:大塚宏一 言 近年の高齢化社会の進行により,変形性関節症の患者は 増加している(1).この変形性関節症は関節軟骨の摩耗により 骨と骨がこすれ合うようになる病気である.本研究では荷 重関節でない指関節を対象として関節を開大することによ り痛みを緩和する装具の研究開発を行なっている.関節の 開大を,屈曲・伸展による運動の中で靭帯への負担が少な い角度で運動方向に対して法線方向に行うことで,最も効 率的に関節面を引き離すことができると考えられる(2).この ため,今年度は指の関節面の相対運動を 2 次元的に計測で きる装置を製作し,関節面の運動解析を試みた.なお,本 測定では左手第二指に装着して解析した. 2.装置の機構 図 1 に設計した装置の機構を示す.リンク部には軽量化 および曲げ加工が容易なためアルミニウム合金を採用した. 装置全体の可動部は 3 箇所設けた.一つ目は,基節骨に対 する中節骨の回転角度を測るため,近位指節間(PIP)関節に, 2 つ目は中節骨が軸方向に対してどれだけ傾くか(アームの 姿勢角)を測るために指先に,3 つ目は PIP 関節の回転運動 に対して中節骨がどれだけ軸方向に直線変位するかを測る ため,リンク機構内に設けた.この機構により,装着部分 の相対変位を 2 次元的に検出した. 図1 装置の概略図 図2 装着部間の相対変位の軌跡(円運動との比較) 図3 法線方向の角度とアーム 2 の姿勢角の関係 3.実験結果および考察 はほぼ一致した.ただし,屈曲角 0~90°においてはほぼ直 線的な動きをしていることから,直動ポテンショメータを荷 重制御アクチュエータに変更することにより最適に開大で きるものと考えられる.この結果から関節の開大方向は中節 骨の軸方向でよいといえる. 今回は製作した装置を指に装着し,完全に伸ばしきった状 態(屈曲角度 0°)を初期位置として,PIP 関節が 90°程度 曲がるまで計測を行なった.図 2 に装着部間の相対変位の軌 跡を示す.円運動とのずれを確認するために,円の軌跡を同 じ図中に破線で示す.計測した左手第二指の中節骨の軌跡は 円運動とほぼ同じであることが分かった.異なる点は屈曲角 度が 25°から 65°までの間で円運動ではなく直線的な動き が見られた点である.つまりこの範囲が靭帯の張りに余裕が あり,開大しやすいと推察される.また,図 3 に法線方向の 角度とアーム 2 の姿勢角(φ=θ1+θ2)との関係を示す.線形 近似したものは破線で示す.横軸(アーム 2 の姿勢角)が 40 度付近では,アーム 2 の姿勢角と法線方向の角度 参考文献 (1) 井上和彦・福島茂:ひざの痛い人が読む本「変形性関節 症」痛み解消 Q&A pp.139-152,講談社 (2) 笹田直・塚本行男・馬渕清資:バイオトライボロジ- -関節の摩擦と潤滑- pp.18,産業図書 -7-
© Copyright 2026 Paperzz