III. 複雑系基礎(続き)
11. 物理系とカオス、フラクタル
12.数値計算とカオス、フラクタル
11.物理系とカオス、フラクタル
11.1 荷電粒子の運動
(1)断熱不変
ハミルトン系
q˙ i =
!H
!H
, p˙ i = "
!pi
!qi :運動方程式
H(p1, p2 ,...q1,q 2 ,... | # ) :ハミルトニアン
pi
:一般化運動量
qi
:一般化座標
A=
! pdq
正準変数(Canonical Variables)
:断熱不変量
運動がほぼ周期運動である時に
力学系の外部パラメータを、運動の周期に比べ
てゆっくり変化させる時に保存する
例:パラメータの変化する調和振動子
2mE
2
1 p
H(p,q | ! ) = ( + m! 2 (t)q 2 ) = E(t)
2 m
A=
! pdq =
2E /m! 2
2"E
#
外部パラメータがゆっくり変化した時相空間の体積が保存され
る:これはLiouvilleの定理に関係ありそうであるが、Liouvilleの定理は
厳密に成り立つのに対して断熱不変量は近似的に保存される。
(2)電場・磁場中の荷電粒子の運動
★R.J. Goldston, P.H. Rutherford, Introduction to
Plasma Physics (IOP Publishing Ltd., London 1995)
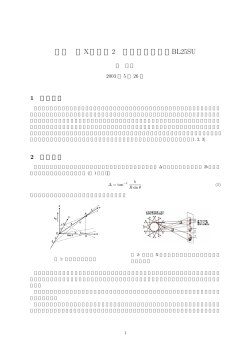
① ジャイロ運動
!
! !
mv˙ = qv ! B
mv˙ x = qvy B
[1]
!
!B
mv˙ y = "qvx B
Proton
mv˙ z = 0
# qB &
d vx
= "% ( vx
2
dt
$ m'
) vx = Acos*c t + Bsin *c t
2
2
*c +
qB
m
複素数表示:
Electron
:サイクロトロン周波数、ラーマー周波数、ジャイロ周波数
(Cyclotron Frequency, Larmor Frequency, Gyro-Frequency)
vx = Re[(A ! iB)exp(i"c t)] = Re{[ v# exp(i$ )] exp(i"c t)} = Re[ v# exp(i"c t + i$ )]
vy = Re[±iv# exp(i"c t + i$ )]
rL !
v"
mv"2
, v" ! vx2 + vy2 , W !
#c
2
v
m
2W m
2mW
rL = " = v"
=
=
#c
qB
m qB
qB
:サイクロトロン半径、ラーマー半径、ジャイロ半径
(Cyclotron Radius, Larmor Radius, Gyro-Radius)
!
rL,proton
rL,electron
=
mproton
melectron
" 1840 ~ 43
② 案内中心(Guiding Center)運動
!以下、複素数表示をしてReを省く
一様磁場中の運動は次のように表される。
$v '
x = xi ! i& " )[exp(i#c t + i* ) ! exp(i* )]
% #c (
$v '
y = yi ± & " )[exp(i#c t + i* ) ! exp(i* )]
% #c (
z = zi + vzi t
ジャイロ運動の中心を案内中心(Guiding Center)と呼ぶ:ジャイロ運動一周
期で平均した粒子の位置
#v &
xgc = xi + i% ! ( exp(i) )
$ "c '
#v &
y gc = yi ! % ! ( exp(i) )
$ "c '
!この段階では、磁場に垂直な
面内での案内中心の位置は時間
的に変化しないことに注意。
案内中心座標を使って粒子運動は次のように表される。
$v '
x = xgc ! i& " ) exp(i#c t + i* )
% #c (
$v '
y = y gc ± & " ) exp(i#c t + i* )
% #c (
z = zi + vzi t
③ 一様磁場、一様電場中の運動
!
!
B = Bzˆ, E :一様磁場、一様電場、時間に依存しない
非相対論的運動方程式
!
!
! !
mv˙ = q(E + v ! B)
次の変換を行なう
!
!
! ! E"B
u= v! 2
B
!˙ !˙
v = u (磁場、電場は時間に依存しないから)
! ! ! ! ! !
!
u˙ = q[E + u ! B + (E ! B) ! B /B2 ]
[2]
! !
ˆ
次のベクトル恒等式を使って[1]式を変換する。 ただし、 b ! B / B
! ! !
! ! ! ! ! !
( A ! B) ! C = ( A " C )B # (B " C ) A
!
!
! !
mu˙ = q[bˆ (E ! bˆ ) + u " B]
mu˙ // = qE//
! bˆ
磁場に平行な運動:[2]式 :
磁場に垂直な運動:[2]ー[3] !
bˆ
qE
v// = // t + v//i
m
!
!
!
mu˙ ! = qu! " B
[3]
[4]
[5]
![5]式は[1]式(純粋に磁場だけ)の場合と同じ形をしている!!
!
!
⇨ u
から に逆変換して、案内中心速度が次のように得られる。
v
!
!
vgc = v// bˆ + vE
! !
!
E!B
: ドリフト(E
x B Drrift)
E!B
vE = 2
B
B
/0
&'()
%
E
&*%+,-.
!"#$
10
vgc
!
/.
電子の場合
&'
同様のドリフトに重力ドリフト(Gravitational
%(!)*+,
Drift)がある
! !
!
!
( F ! B) !
vF =
, F = mg として
2
qB
! !
!
m( g ! B)
vg =
qB2
"#$%
-.
④ 非一様磁場中のドリフト運動
1] 磁場勾配ドリフト( drift)
!B
ジャイロ半径が変化のスケール長に比べて小さいことを仮定。
rL
!B << 1
B !
!
v!2 B # $B W! B # $B
vgrad = ±
=
2"c B2
q
B3
高磁場
B
低磁場
!B
vgc
イオン・ドリフト
⑤ 磁力線湾曲ドリフト(Curvature Drift)
磁力線は、局所的に見ると、円柱面上にあると近似して計算する。粒子は磁力線
に沿って動くので、円柱の中心から外向きに遠心力が働く。このため、円柱の軸
と平行な方向に力が働く。この力に基づくドリフトが湾曲ドリフトである。
!
!
mv//2 ˆ
2 Rc
Fcf =
r = mv// 2
Rc
Rc
! !
! !
2
v// Rc ! B 2W// Rc ! B " 2W// % !
vcurv = 2
=
= $ 2 'B ! [( bˆ ( )) bˆ ]
qB Rc2
qB2 Rc2
# qB &
対象とする空間内に電流が流れていない時、則ち、
磁力線
!
!
(!B) " = #BRc /Rc2 = (B $ !) bˆ
遠心力
この場合には、
!
!
!
v//2 B " #B 2W// B " #B
vcurv = ±
=
! c B2
q
B3
これは、磁場勾配ドリフトと同様な形をしている。
⑥ 磁気モーメントの保存
ここまでの議論
・磁力線に垂直な方向:非一様性 ⇨ 磁力線に垂直な方向のドリフト
・磁力線に平行な方向:電場による加速
ここでの議論
・磁力線に平行な方向に磁場勾配があったら?
磁力線の方向をz軸とする。磁場の強さが磁力線方向に増加する時 !
であるので、z成分以外の磁場成分が生じて磁力線の密
!"B#0
Br
度が大きくなる。磁力線に垂直方向のの平均値 は次のように
して求められる。
*#
dB & ! ("r) 2 +% B + "! ( ) B. + 2!"r"! Br = 0
dz ' /
,$
Br = )
"r dB
2 dz
Br
B
!r
z
!!
dB
B + !!
dz
!r = rL
半径=ラーマー半径( )の面上で平均して、z方向の力を出す。
F// = !
q v"2 dB
W dB
=! "
2#c dz
B dz
力の向きは、電荷の正負にかかわらず、磁場勾配の逆向きになる。
1 mv"2 W"
=
2 B
B
dv//
dB
m
= #µ
dt
ds
µ!
v// (= ds /dt)
:磁気モーメント
s
は、磁力線に沿った座標
を両辺にかけて、
d ! mv//2 $
dB ds
dB
= 'µ
#
& = 'µ
dt " 2 %
ds dt
dt
これより
%
d " mv//2 mv!2 % d " mv//2
+
+ µB' = 0
$
'= $
dt # 2
2 & dt # 2
&
dB d
(µ
+ (µB) = 0
dt dt
dµ
)
=0
dt
µ=
W!
= const
B
mv//2
= W ! µB
2
磁気鏡(Magnetic Mirror)
粒子:(低磁場領域) ⇨ 高磁場領域
平行方向速度: ⇨ 低下
磁場が十分高くなると、平行方向速度 ⇨ 0
⇨ 粒子は反射されて逆方向に向かう
v//
(3)第1、第2、第3断熱不変量
① 第1断熱不変量
「断熱不変量」と言う時には、第1断熱不変量をさす。
磁場中の荷電粒子運動に関しては、ラーマー運動に伴う磁気モーメント
が第1断熱不変量である。
J=
2"
! pdq = ! (mr v
L #
)d$ = 2"mrL v# =
0
2"mv#2 4 " W# 4 "
=
=
µ
%c
q B
q
ラーマー運動
B
W!
µ
弱 強
小 大
一定 一定
② 第2断熱不変量
磁場中の荷電粒子の運動については、案内中心の運動をハミルトン形
式に書くことができる。案内中心の運動が強磁場領域で反射して(バウ
ンス運動)ほぼ周期的な場合、断熱不変量を定義することができる。こ
の断熱不変量を第2断熱不変量と言う。この断熱不変量は「粒子運動」
の断熱不変量ではなく「案内中心の運動」の断熱不変量であることに注
意せよ。
1
H = mv//2 + µB + e!
2
J = " v// ds
$ 2(W # µB) '
v// = &
)(
%
m
1
2
:案内中心運動方程式のハミルトニアン
:案内中心運動の断熱不変量
v// = 0
強磁場
弱磁場
v//
強磁場
v// = 0
バウンス運動
③ 第3断熱不変量
磁力線に沿ってバウンス運動する案内中心軌道がそれに直角方向にド
リフトして周期運動をする時には、この周期的ドリフト運動について断
熱不変量が定義される。これを第3断熱不変量という。地球磁場による
荷電粒子の運動の時には、このドリフトは磁場勾配ドリフトと磁力線湾
曲ドリフトであって、磁力線に捕捉された陽子は地球の自転と反対方向
にドリフトしている。
J=
! v Rd"
d
断熱不変の条件(運動の1周期
に亘って場の変化がゆっくり変
化)は運動スケールが大きくな
るにつれて満たされにくくな
る。 ⇨ 第3,第2、第1
の順に保存則が破れていく。
ドリフト運動
(4)地球磁場中の荷電粒子
案内中心運動を考える。
案内中心運動が周期的である場合を考える。
⇨ ミラー磁場中の荷電粒子運動である。
J
この時の断熱不変量は、第2断熱不変量 である。
問題:地球磁場(地球の双極子磁場が太陽風の圧力で変形した磁場)に
捕捉された高エネルギー(MeV領域)粒子の運動を論ずる。
① 捕捉された荷電粒子運動の概要
地球磁場が静的で、電場がほとんど無い時
*荷電粒子は磁力線に巻き付いてラーマー運動をする(磁場に捕捉される)
*捕捉された粒子は、極付近の強磁場領域で反射してバウンス運動をする
(磁気モーメント保存軌道)
*バウンス運動をする粒子は磁場勾配、磁場湾曲によるドリフト運動をする
(J保存軌道)
太陽風
自転
ドリフト
:ラーマー運動
:バウンス運動
:ドリフト
断熱不変量(Adiabatic Invarint)
南北軸
磁気モーメント(Magnetiv Moment):
mv"2 W"
µ=
v =
=
2! c
2B
B
q
!c =
qB
m
2
"
赤道面
:サイクロトロン周波数
(Cyclotron frequency, Larmor frequency, Gyro-frequency)
m 2
v = W # µB
2 !
第二断熱不変量(Second Adiabatic Invariant)
J ! " v! ds
極
② J非保存キック
J, W, µ が保存される時
⇨ 同一緯度では軌道の高さは一定
太陽風による摂動がある時
⇨ 軌道の高さは一定ではない
ある荷電粒子が、地球の赤道面を横切った点をプロットする
1] 地球双極子磁場だけの時(Pure Dipole Case)
! j +1 = ! j + ! p + ! p '(rj " r0 )
r0
rj +1 = rj
!p
r0
:初期位置におけるバウンス周期あたりのドリフト角度
2] キックのある時のJ非保存写像
! j +1 = ! j + ! p + ! p '(rj " r0 )
標準写像(Standard Map,
rj +1 = rj + # cos(n! j +1 )
Chirikov-Taylor Map)
r0
# cos(n! j +1 ) :キック(摂動)
③ 写像のスケーリング
*この写像を特徴づけるパラメータの組は何か?
*この写像のトポロジーを変化させないで、数値のみを変化させる
パラメータの組は何か?
! p , ! p ', r0 , ", n
*この写像は5つのパラメータ( )で定義さ
r0
れているように見えるが、本当に5つのパラメータが必要か?
次の変換を行なう
! " # $ n!
rj " xj $ n! p + n! p '(rj % r0 )
! j +1 = 2"u'+ " /2
r0
! j = 2"u + " /2
このようにすると、元の式は次のようになる
xj +1 = 2"v'
! j +1 = ! j + xj
xj = 2"v
xj +1 = xj + " cos(! j +1 )
u'= u + v (mod 1)
" # $n% p '
v'= v # ($ /2" )cos(2"u')
!
この写像を特徴づけるのはただ一つのパラメータ である
④ 標準写像の図
! = 0.5
! = 0.0
! = 0.25
! = 0.75
! = 1.0
(5)粒子加速器におけるバケツ写像(Bucket Map)
:k回目の加速後の粒子エネルギー
Ek = Ek!1 + eV sin " k
E =E
s
k
s
k!1
y =E!E
+ eV sin "
:k回目の平衡加速量(設計値)
s
:平衡加速位相(設計値)
s
y k = y k!1 + eV(sin " k ! sin " ) :k回目の加速量(設計値からのずれ)
s
Ek
高周波加速
2#
s
! k = ! k"1 +
h$ k"1
キャビティ
$ k"1 (Ek"1 )
% $ (E s )
(
Ek!1 eV sin ! k
k"1
k"1
= ! k"1 + 2#h'
"1
(mod
2
#
)
*
s
& $ k"1 (Ek"1 + y k"1 ) )
:加速キャビティ通過時の位相
(s )
"
%
d
!
! (E) + O(y 2 ) = ! s + $ ' y
# dE &
" d! %(s )" dp %(s)
= !s + $ ' $ ' y
# dp & # dE &
" !E %(s )
= ! + $ 2 2 (' y
#p c &
s
" !E %(s)
) * k + * k,1 , 2-h$ 2 2 ' y k,1
# p c & k,1
! E 2 = m2c 2 + p 2c 2
dp
p d#
E
= 2, !"
dE pc
# dp
!E
!
Bucket Map
★Leo Michelotti, Intermediate Classical Dynamics with Applications to Beam Physics (John Wiley and Sons, Inc., 1995)
(6)ハミルトニアン写像と面積保存(Liouville’s Theorem)
!j
! j +1
標準写像において、cosine項の引数が でなくて である理由
⇨ Liouville’s Theorem を満たすため!(ハミルトニアン写像であるため)
x
(xj + !x," j ) (xj + !x," j + !" )
!
A
(xj ,! j ) (xj ,! j + "! )
SA , SB:面積
(xj +1 + !x
# j +1 + !x
"xj +1
"x j
"# j +1
"x j
(xj +1,! j +1 )
,
# j +1 + !x
)
SA = !x " !#
% $x
( % $x
(
$# j +1
$# j +1
j +1
j +1
SB = ''
!xxˆ +
!x#ˆ ** + ''
!#xˆ +
!##ˆ **
$x j
$# j
& $x j
) & $# j
)
-$xj +1 $# j +1 $# j +1 $xj +1 0
2!#!x
=/
,
$xj $# j 21
/. $xj $# j
(xj +1 + !x
B
(xj +1 + !"
" j +1 + !"
"xj +1
"x j
"# j +1
"x j
#xj +1
#" j
#" j +1
#" j
,
)
+ !#
+ !#
"xj +1
"# j
"# j +1
"# j
,
)
SA ! SB = (J !1)"x # "$ = 0
J!
"xj +1 "# j +1
"xj "# j
$
"# j +1 "xj +1
"xj "# j
:ヤコビアン
標準写像では、
!" j +1
!" j
= 1,
!" j +1
!x j
=1
xj +1 = xj + # cos " j +1 = xj + # cos(" j + xj )
!xj +1
!x j
!xj +1
!" j
= 1$ # sin " j +1
= $# sin " j +1
% J = (1$ # sin " j +1 ) &1$1& ($# sin " j +1 ) = 1
(7)振り子から標準写像
1 2
p ! k cos"
2
dp
d"
= p,
= !k sin "
dt
dt
" (t) = " (0) + t # p(0)
H=
p(t) = p(0) ! t # k sin " (0)
:一次の積分
$" (t)' $ " (0) + t # p(0) '
$
'
˜ &" (0))
&
)=&
)=M
% p(t)( % p(0) ! t # k sin " (0)(
% p(0)(
$
1
t'
1
t
˜ *&
M
= 1+ t 2 k cos" + 1
), J =
!t
#
k
cos
"
1
!t
#
k
cos
"
1
%
(
⇨ シンプレクティックでない
d!
! (t) # ! (0)
= p(t)
"
$ p(t)
dt
t
dp
p(t) # p(0)
= #k sin ! (t) "
$ #k sin ! (0)
dt
t
% ! (t) = ! (0) + t & p(t) = ! (0) + t & p(0) # t 2 & k sin ! (0)
p(t) = p(0) # t & k sin ! (0)
"! (t)% "! (0) + t ( p(0) ) t 2 k sin ! (0)%
"
%
ˆ $! (0)'
'=M
$
'=$
p(0) ) t ( k sin ! (0)
# p(t)& #
# p(0)&
&
"1) t 2 k cos ! t %
1) t 2 k cos ! t
ˆ
M *$
=1
', J =
)t ( k cos! 1
# )t ( k cos! 1&
⇨ シンプレクティック
として
t =1
!1 = ! 0 + p1
p1 = p0 " k sin p0
⇨ 標準写像
11.2 2次元写像の一般化
(1)エノン写像
エノン写像:定数ヤコビアンを持つ一般的2次元2次写像
Michel Hénon
! x$ !1' ax 2 + y $
Hab # & = #
&
bx
" y% "
%
x = t, y = 0
例: の時、 (実軸)の像は
b =1
! t $ ! 1 ' at 2 $
H ab #
=
&
" 0 &% #"
t
%
x = 1! at , y = t
これは、パラメータ表示された放物線( )である
2
!エノン写像は、ロジスティック写像の2次元版と考えられ、Michel Hénon に
よってローレンツモデルのポアンカレ断面図として見いだされた。一般に、
エノン写像は何らかの3次元流れのポアンカレ断面図である。
定数ヤコビアンの任意の2次元2次写像は線形の座標変換によって次の
ような標準的なエノン写像に変換される
! X'$ !1+ Y ' aX 2 $
&
# &=#
bX
"Y'% "
%
or
! x'$ !
$
y
# &=#
2&
" y'% "( ' )x ' y %
① エノン写像のヤコビアン
! xn +1 $ ! f (xn ,y n )$ !1' axn2 + y n $ ! '2axn
&=#
#
&=#
&=#
bxn
" y n +1 % " g(xn ,y n )% "
% " b
J=
'2axn
b
1$! xn $ !1$
&# & + # &
0%" y n % "0%
1
= 'b
0
定数のヤコビアンを持つもっとも一般的な 上の2次の写像(Henon)
R2
0 < b < 1 について考える。この場合、面積縮小。
この写像は、次のように3ステップに分解して考えることができる
! x$ !1' ax 2 + y $
! x$
H# & = #
& = H 3 ! H 2 ! H1# &
bx
" y% "
" y%
%
! x$ !
$
x
H1# & = #
&
2
" y % "1' ax + y %
! x$ ! bx$
H 2# & = # &
" y% " y %
! x$ ! y $
H 3# & = # &
" y % " x%
y
y
y
x
x
H1
x
H2
x方向縮小
② エノン写像の性質
1] エノン写像は1対1写像である
以下が成り立つとする
! x$
! z$
Hab # & = Hab # &,
" w%
" y%
for x, y, z, w ' R
すなわち
1( ax 2 + y = 1( az 2 + w
bx = bz
したがって
x=z
y=w
y
H3
xy交換
x
2] エノン写像は可逆で逆写像は次のように表される
"
"
%
$
x
Hab!1$ ' = $
# y & $!1+
#
%
1
y
'
b
'
a 2
'
y
+
x
&
b2
これは、次のようにして確かめられる
"
" x%
$
!1
(Hab ! Hab )$ ' = Hab $
# y&
$!1+
#
" y %2 "
%%
a 2
% "
1
$
1!
a
+
!1+
y
+
x
$
'' " x%
$ '
y
2
'
#
&' =
#
b
&
b
b
$
$ '
'=
a 2
"y%
$
' # y&
'
y
+
x
b$ '
'
& $#
b2
# b&
&
3] 不動点と安定性
! x$
! x$ !1' ax 2 + y $
&
# & = Hab # & = #
bx
" y%
" y% "
%
x=
より
1
(b !1± (1! b) 2 + 4a)
2a
1
a " ! (1! b) 2 の条件のもとに2つの不動点は次のように表される
4
# 1&
! 1
p = (b !1+ (1! b) 2 + 4a)% (
2a
$ b'
#1&
! 1
q = (b !1! (1! b) 2 + 4a)% (
2a
$ b'
!
不動点の周りで線形解析を行なうと、次の条件のもとに不動点 は
p
吸引的不動点になる
# 1
&
3
a ! %" (1" b) 2 , (1" b) 2 (
$ 4
'
4
!
q
同様の解析で不動点 は鞍点であることがわかる
!非線形写像の不動点の安定性
v !V " R 2
F : V # R2
$ f (v)
F(v) = &
&% g(v)
'
) の時、Fの微分を次のように定義する #
)(
%
[DF(v 0 )](v) ! %
%
%
%$
&
"f
"f
(v)
(v) (
"x
"y
(v
(
"g
"g
(v)
(v) (
('
"x
"y
DH ab の固有値の絶対値が1より小さい時には不動点は吸引的(安定)である。
固有値:
!ax ± ax 2 + b
1
不動点なし
(1) a < ! (1 ! b)2
4
吸引的不動点
1
3
(2) ! (1 ! b)2 < a < (1 ! b)2 , a " 0
4
4
+鞍点
③ エノン写像における周期倍分岐とストレンジ・アトラクター
Bifurcation Diagram of Henon Map for b=0.3
x
a
の時の分岐
b = 0.3
★ B. Derrida, A. Gervois, Y. Pomeau, J. Physics A: Math. Gen., 12 (1979) 269-296
a
-0.1225
0.3675
0.9125
1.0260
1.0510
1.0565
.....
1.0580459
サイクル数
1
2
4
8
16
32
.....
!
エノン写像のファイゲンバウ
ム数(2対1写像のファイゲ
ンバウム数とは異なる)
a > a!
で、エノン・アトラクターが得られる。後に記すローレンツ・アトラ
クターのように連続系のストレンジ・アトラクターは3次以上の系で現れる
が、エノン写像のような離散系では2次の系でも可能であることに注意せよ。
④ エノン・アトラクター(ストレンジ・アトラクター)の性質
・フラクタル
・ある方向にはスムーズで、もう一つの方向にはカントール集合
1.42 ± 0.02
・相関次元: ハウスドルフ次元:
1.261± 0.003
!"#$%&'()"%$*
!"#$#%&'"#$(
%$,
%$&
%$*
%$%$#
%
+%$# %
+%$+%$*
+%$&
+%$,
*
+$,
+
#$,
#
)*
)+
)#$, #
+
+-
*
+#
)+
)+$,
)*
!"#$%&'("#$)
*,
*-
*-
*#
#$%
#$+
#$)
#$,
#$#
*#$- #
*#$,
*#$)
*#$+
*#$%
-
,
+-
%$&
%$,
%$*
%$%$#
%
+%$# %
+%$+%$*
+%$,
+%$&
+#
!"#$%&'("%$)
!"#$%&'(")$*
%$+
%$,
%$)
%$%$#
%
*%$# %
*%$*%$)
*%$,
*%$+
)$,
)$%
)$*
)$)$#
)
+)$# )
+)$+)$*
+)$%
+)$,
#
+-
-
+#
#
-
#
-
!"#$"%&'&()*"#$"%'++(),#$"%-./()0#$"%...
"
'
"
"$3
&
&$3
"%2
*"$-
"
$'
*"$+
$"%2
$"%2
*"$2
$'
*&
$'%2
*&$1
$1
!"#$"#"%&'#(")*+%&,#(")--.
(/
(+
'
'%2
1
/
"
")*
/
/)*
"
+
$/
$"%. "
$/
$/%.
(/)*
"%2
"%.
"
(")*
"
!"#$"%&''()*"#"%"+,()-#$"%./()0#$"(,,,,,
")*
(")*
-
!"#$%&&'()"%$*
!"#"$%&%'()"#*"$&++'(,#*"$-./'(0#*"$...
*"$1
#
$'
$'%.
/
'
1
(2)荷電粒子ビームとエノン写像
加速器中の荷電粒子ビームのベータトロン振動の解析について考える
ベータトロン振動(線形)
! z1(n +1) $
! z1(n ) $ ! cos2()
=
'
# (n +1) &
# (n ) & = #
" z2 %
" z2 % " *sin2()
sin2() $! z1(n ) $
&# ) &
cos2() %" z(n
2 %
ベータトロン振動(含:Kick by a Thin Sextupole Magnet)
! z1(n +1) $
! z1(n ) $ ! cos2()
=
'
# (n +1) &
# (n ) & = #
" z2 %
" z2 % " *sin2()
$
sin2() $!
z1(n )
&# (n )
(n ) 2 &
cos2() %" z 2 * + (z1 ) %
⇨ エノン2次ねじれ写像(Hénon Quadratic Twist Map:シンプレクティック)
!z1(n +1)
!z(n )
J = (n1 +1)
!z 2
!z1(n )
!z1(n +1)
)
cos2"# $ 2 %z1(n ) sin2"#
!z(n
2
=
+1)
!z(n
$sin2"# $ 2 %z1(n ) cos2"#
2
)
!z(n
2
sin2"#
=1
cos2"#
(n) 2
(n) 2
(!) z1(n+1) = cos 2!" z1(n) + sin 2!" z(n)
z(n+1)
= # sin 2!" z1(n) + cos 2!" z(n)
2 # $ sin 2!" (z1 ) ,
2
2 # $ cos 2!" (z1 )
%z1(n+1)
= cos 2!" # 2$ z1(n) sin 2!" ,
%z1(n)
%z1(n+1)
= sin 2!"
%z(n)
2
%z(n+1)
2
= # sin 2!" # 2$ z1(n) cos 2!" ,
%z1(n)
%z(n+1)
2
= cos 2!"
%z(n)
2
Bd (x) = B0
Bq (x) = bq x
Bs (x) = bs x 2
Dipole Magnet
双極子磁石
Quadrupole Magnet
四重極磁石
Sextupole Magnet
六重極磁石
!六重極項
「3.パラメトリック励振」参照
!Bz
1 ! 2Bz 2
x+
x +!
!r
2 !r 2
!B
1 ! 2Br 2
+ r z+
z +!
!z
2 !z 2
Bz = B0 +
Br =
双極子項
六重極項
(二重極項)
Sextupole
Dipole
四重極項
Quadrupole
加速器における応用例:ダイナミック・アパーチャー
11.3 散逸系とアトラクター
(1)2次元自律系のアトラクター
n
一般に、次のような 個の微分方程式の組を考える。
x˙1 = f1 (x1,x2 ,...xn )
x˙ 2 = f 2 (x1,x2 ,...xn )
!
x˙ n = f n (x1,x2 ,...xn )
(x1,x2 ,...xn )
相空間 に相軌道を考える。
解の一意性 ⇨ 相軌道は交わらない。
相空間体積の減少する力学系:散逸系
散逸系のアトラクターの例
減衰振動 ⇨ 点(点アトラクター)
Van der Pol 振動 ⇨ 平面の閉曲線(リミットサイクル)
ポアンカレ・ベネディクソンの定理
次のような2個の微分方程式で表される自律系を考える(2次元自律系)
dx
= f (x,y)
dt
dy
= g(x,y)
dt
f , g :連続
で、軌道が有界であるならば、軌道は臨界点、または、リミット
t !"
サイクル、あるいは、臨界点またはリミットサイクルに近づくかのいずれ
かである。
すなわち、2次元自律系がアトラクターAを持つ時、Aは臨界点とリミッ
トサイクルの和集合である。臨界点、リミットサイクルの次元は、それぞ
れ、0,1であるのでストレンジアトラクターではない。
(2)ローレンツ系(Lorenz System)
流体の運動(Rayleigh-Bénard Convection)
小 !T
低温
大!T
!T
!T
熱伝導
高温
対流
レーリイの法則(対流発生の条件)
Ra = g!H 3 ("T)# $1% $1 :レーリイ数(Rayleigh Number)
Rc = & 4 a$2 (1+ a 2 ) 3
:臨界値
H :高さ
a :容器によって決まる定数
! :熱膨張係数
# :動粘性率
% :熱伝導率
Ra ' Rc :対流発生の条件
ローレンツ系
dx
= !y " !x
dt
dy
= rx " y " xz
dt
dz
= xy " bz
dt
x
:対流の強さに比例した変数
y
:上昇流と下降流の温度差に比例した変数
z
:鉛直方向の温度変化の一次関数からのずれ
#
!=
:プラントル数
$
R
r= a
:規格化レーリー数
Rc
4
b=
:容器に関する定数
1+ a 2
(3)ローレンツ・アトラクターと特徴量
標準的パラメータ値: ! = 10, b =
8
, r = varied (28)
3
x ! "x, y ! "y, z ! z
基本的性質: ① 変換( )で式は不変。
② 相空間体積は以下に示す定率で縮小する。
!=
"x˙ "y˙ "z˙
+
+ = #($ + b + 1)
"x "y "z
③ 正の時間では解は有界である。大初期値で0に収束する。
これは、次のように証明される
u = z ! r ! " とすれば、ローレンツ方程式は、
x˙ = !" (x ! y), y˙ = !y ! x(u + " ), u˙ = !b(u + r + " ) + xy となる
これより
#
& 1
1 d 2
1
(x + y 2 + z 2 ) = !"x 2 ! y 2 ! b%u + (r + " )( + b(r + " ) 2
$
' 4
2 dt
2
2
"
% 1
1
!x 2 + y 2 + b$u + (r + ! )' = b(r + ! ) 2
この式は、「楕円体 の外側では
#
& 4
2
x2 + y 2 + z 2
が時間とともに減少する」ことを示している
2
ローレンツ・モデルのアトラクターの分類
! = 10, b =
8
3
r
として、 を変化させると次のようになる。
r
点アトラクター
0 < r <1
(0, 0, 0)
1 < r <r1
r1 < r < r 2
r2 < r
ストレンジ
アトラクター
・定常熱伝導
1
1
"
%
$± [ b(r !1)] 2 ,±[ b(r !1)] 2 ,r !1'
#
&
1
1
"
%
$± [ b(r !1)] 2 ,±[ b(r !1)] 2 ,r !1'
#
&
存在しない
r1 = 24.06, r2 =
! (! + b + 3) 470
=
# 24.74
! " b "1
19
備考
・定常対流
"
"
・定常対流
・乱流
・乱流
Time series for Lorenz's system variables.
Initial conditions are (0.3, 0.3, 0.3) for black lines.
In x(t) series initial conditions are changed (0.300000005, 0.3, 0.3) (red line)
http://complex.upf.es/~josep/Chaos.html
地磁気反転に見られるカオス
更新世
鮮新世
新第三紀
中新世
dI1
+ RI1 = M!1I2
dt
dI
古第三紀
L 2 + RI2 = M! 2 I1
dt
d!
C 1 = N " MI1I2
dt
d! 2
C
= N " MI1I2
dt
# = (NM /CL)1/ 2 t, X,Y = (M /N)1/ 2 I1,I2 , Z,V = (CM /NL)1/ 2 !1,! 2
L
として
X˙ + µX = ZY
Y˙ + µY = VX
Z˙ = V˙ = 1" XY
http://setiathome.berkeley.edu/~pauld/etc/210BPaper.pdf
漸新世
始新世
(4)レスラー系(Rössler System)
支配方程式:
x˙ = !y ! z
y˙ = x + ay
z˙ = b + z)x ! c)
アトラクターの例:
a = b = 0.2, c = 5.7
レスラー系の意義:
さまざまなカオスを生み出す最小の力学的性質についての情報を得る
簡単な数学モデルであって、物理的対象とは関係ない
a
b
c
リターンマップ
a = 0.432, b = 2, c = 4
a
b
c
ab
© Copyright 2026 Paperzz