兵庫県立大学理学部
2012 年度
講師 伊達 伸
一般相対論序説
特殊相対論では、慣性系が特別な役割をしていた。そこで考えた物理学を
記述する系は慣性系であり、光速不変の原理を満たす慣性系間の変換として
Lorentz 変換が与えられたのであった。しかし、物理学の基本法則を記述す
る系を慣性系だけに限る理由はないのではないか。慣性系でない系は、一般
の加速度系である。加速度系の中では、全ての物体は質量やその他の属性に
依らず一様に加速度運動を行なう。ところで、一様な重力の作用している場
合、全ての物体が質量に依らず一様に加速度運動するという不可思議な 1 物
理現象を我々は知っている。重力の作用の中に居るということは、加速度系
に居るということなのではないか。アインシュタインの構築した一般相対性
理論は、重力の作用の下にある系が加速度系として扱えるという「等価原理」
を持ち込むことによって、重力をも扱おうとする理論である。
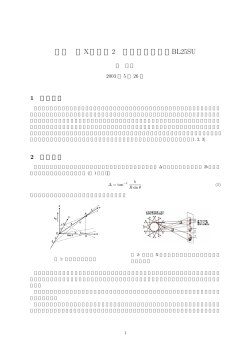
時空図の中に加速度運動する粒子の世界線を書き込んでみよう。この加速
度運動の原因はいろいろありうるが、粒子に働く重力もその中に含まれる。
これらの粒子の静止系は、時間と場所によってそれぞれ異なるだろう。時空
の各点で粒子の固有系となるような時空座標を書き込み、それを次々につな
げていくと曲線となる。一般座標変換では、このような曲線座標系から別の
曲線座標系への時空座標の変換を扱うことになる。
読み易い参考書として
[1] 須藤靖、「一般相対論入門」日本評論社(2005)
を挙げておく。この参考書で足りない場合は、
[2] 小玉英雄,「相対性理論」培風館、物理基礎シリーズ6、(1997)
を勧める。
1 世の中の大半の人達はこれを当たり前と思うだろうが、力学を知っている人にとっては不可
思議と言う他ない。
1
一般座標変換
1
これ以降、時空座標を単に座標と呼び、時空座標の変換の意味で「座標変
換」という。一般座標変換は、次のようにあらわすことが出来る。
′
′
dxµ → dxµ =
∂xµ
dxν
∂xν
(1)
但し、変換された量は添字にダッシュを付けて表している 2 。特殊相対論で
′
は、変換係数 ∂xµ /∂xν は定数であった。例えば「相対論講義資料」
(18)式
′
′
の Lorentz 変換の場合、∂x0 /∂x0 = γ 、∂x1 /∂x0 = −γβ 等である。しかし
一般座標変換ではこれらの係数が時空点毎に異なっている場合を考えなくて
′
′
はならない。変換係数から成る行列 Gµν = ∂xµ /∂xν を考えれば、この変換
′
′
を Lorentz 変換の場合のように dxµ = Gµν dxν と行列による変換の形にあ
らわすことも出来るが、G は時空点の関数なのでこの変換は線形にはならな
い。線形でない変換をこのように書いてもあまり意味がないし、かえって誤
解の元にもなるので、特に理由が無い限り一般座標変換をこのように書くこ
とはない。変換(1)が時空座標 xµ に対する変換ではなく、微小な時空座標
差(「線素」と呼ばれる)dxµ に対して与えられているのもこのためである。
つまり、x というベクトルは、原点から点 x に至る各点で定義された無数に
多くの線素 dx の和であるが、各点での dx に対する変換が異なるので、簡単
には書けない 3 。(1)式は、座標変換を時空の各点で与えているのである。
1.1
スカラー、ベクトル、テンソル
(1)式のように変換される量、
′
′
aµ → aµ =
∂xµ ν
a
∂xν
(2)
を、一般座標変換の反変ベクトルと言う 4 。時空点の関数 ϕ = ϕ(x) がスカ
ラー(場)であるとは、一般座標変換に伴って ϕ が
ϕ(x) → ϕ′ (x′ ) = ϕ(x)
(3)
と変換されることを言う。スカラーの微分 ∂ϕ/∂xµ の変換式を(1)式から求
めると、
∂ϕ
∂ϕ
∂xν ∂ϕ
→
=
′
∂xµ
∂xµ
∂xµ′ ∂xν
となる。このように変換される量、
bµ → bµ′ =
2 普通の言い方をすると、xµ′
′
∂xν
bν
∂xµ′
(4)
(5)
は x の µ 成分ではなくて、x′ の µ 成分である。ちょっと変
だが、一般相対論ではこの方が便利なのでこの記法を使うことにする。
3 書くのは難しいし、書いて意味があるかどうかさえ不明だが、xµ に対応する時空点の変換
′
後の座標 xµ は存在はしている。
4 須藤靖さんは、その著書 [1] の中で、
「ベクトルの反変成分」と言うべきだと主張されてお
られるが、僕も同意見である。
2
を共変ベクトルと言う。反変ベクトルと共変ベクトルは、添字が上にあるか
下にあるかで区別する。偏微分記号を ∂µ = ∂/∂xµ のように書いておけば、
∂µ が共変ベクトルのように振る舞うので便利である。反変ベクトルと共変ベ
クトルのスカラー積(添字について足し上げたもの)5 はスカラーである:
′
′
aµ bµ → aµ bµ′ =
∂xµ ∂xρ ν
a bρ = δνρ aν bρ = aρ bρ
∂xν ∂xµ′
(6)
但し δνρ は ν = ρ のとき 1、それ以外で 0 である。2個の反変ベクトルの積の
ように変換する量
′
′
∂xµ ∂xν ρσ
t →t
=
t
∂xρ ∂xσ
は2階の反変テンソル、2個の共変ベクトルの積のように変換する量
µν
µ′ ν ′
uµν → uµ′ ν ′ =
∂xρ ∂xσ
uρσ
∂xµ′ ∂xµ′
(7)
(8)
は2階の共変テンソルである。一般の高階テンソルは
′ ′
′
T µν···αβ··· → T µ ν α···′ β ′ ··· =
′
∂xµ ∂xν
∂xγ ∂xδ
· · · T ρσ···γδ···
···
ρ
σ
∂x ∂x
∂xα′ ∂xβ ′
(9)
のように変換され、このように上側の反変成分添字 (µ, ν, · · · ) と下側の共変
成分添字 (α, β, · · · ) を同時に持つテンソルは混合テンソルと呼ばれる。2 つの
テンソルの積はテンソルとなるが、テンソルの反変成分添字と共変成分添字
を揃えて和をとると、和をとった添字についての階数が下がる。例えば、2
階共変テンソル uµν に反変ベクトル aν をかけて添字 ν について和をとった
もの
uµν aν
は共変添字 µ をもつ一階のテンソル、すなわち共変ベクトルである。
1.2
計量テンソル
線素 dxµ に対して2階の共変テンソル gµν を用意すると、スカラー
ds2 = gµν dxµ dxν
(10)
を作ることが出来る。gµν は何でも良くて、どんなものであるかは決まって
いないのだが、ある特別の、「計量テンソル」と呼ばれるものを選んだとき、
ds2 を線素 dx の「長さの二乗」と呼ぶ。gµν を (gµν + gνµ )/2 + (gµν − gνµ )/2
と書けば、
(10)式で dxµ dxν = dxν dxµ だから µ と ν について反対称な後ろ
の項は寄与しない。これは、gµν としていつでも対称なものを選ぶことが出
来るということだから、以下では始めから対称なものをだけを考えて行くこ
とにする。特殊相対論での gµν (それを今後 ηµν と呼ぶ)は Minkowski 計量
として予め与えられており、それは時空点に依らない定数行列であった。そ
のような計量で与えられる空間は、座標軸同士の傾きが一定で直線となるの
5 特殊相対論の講義で出て来た「内積」に対応する。
3
で「平坦な」空間と呼ばれる。Minkowski 空間、従って慣性系は平坦である。
一方、一般相対論での gµν は時空の各点で与えるべきものであり、それがど
んな2階テンソルなのかは、添字について対称であることを除いて、予め決
まっていない。それを物理的要請に基づいて決めて行くのが一般相対論であ
るとも言える。尚、特殊相対論を思い出せば 6「.
.
.の2乗」と呼んだからと
言って ds2 が正の量だとは限らないことに注意しておく。
さて、計量テンソル gµν = gµν (x) が与えられたとしよう。任意の反変ベク
トル aµ が与えられたとき、それに対応する共変ベクトルを
aµ = gµν aν
(11)
で定義することが出来る。これの変換は(5)式で与えられている。線素 dxµ
に対応する共変ベクトルは
dxµ = gµν dxν
(12)
で与えられるが、これの変換は
dxµ → dxµ′ =
∂xµ′
dxν
∂xν
(13)
と書けるはずである。これを(5)式と比較すれば、
∂xµ′
∂xν
=
∂xν
∂xµ′
(14)
という関係を得る。
計量テンソル gµν に対する要請の第一は、gµν を成分とする行列 (gµν ) が正
則であるということである。つまり、(gµν ) の行列式 g はゼロでなく、(gµν )
は逆行列を持つ 7 。逆行列の成分を g µν と書くことにしよう。
g µρ gρν = δνµ
(15)
である。任意の反変ベクトル Aν に対して Aν δνµ = Aµ が成り立つので、δνµ
はテンソルである。gµν はテンソルだから、上の式は g µν が2階反変テンソ
ルであることを示している。g µν を使えば共変ベクトルを反変に変えること
が出来る:
g µν aν = g µν (gνσ aσ ) = δσµ aσ = aµ
(16)
gµν によってベクトルの反変成分(上足)を共変成分(下足)に変える方法
は、任意の高階テンソル T µνρ···
αβ··· にも適用される。例えば、このテンソル
の上足 ν を下足に変えるには、
T µν ρ··· αβ··· = gνσ T µσρ···
αβ···
(17)
とやれば良い。同様に、g µν を使えばテンソルの共変成分を反変成分に変え
ることが出来る。例えば
T µν···α βγ··· = g βσ T µν···ασγ···
6 そこでは、ds2
のことを (cdτ )2 と書いていた。
dxµ が独立でなくなってしまう。
7 もしそうでないと、
(12)式において
4
(18)
1.3
平行移動、接続、共変微分
時空点 x
8
におけるベクトル場(の成分)Aµ (x) の微分は、無限小だけ離
れた点 x + dx における場の値との差 dAµ (x) = Aµ (x + dx) − Aµ (x) として
定義される。一般座標変換を考える場合には、2 つの点 x + dx と x とでは一
般に座標系が異なっている。座標系が異なっていれば、同じベクトルでも成
分の値は異なる。従って、dAµ という量には、ベクトルの変化によってもた
らされたものと、座標系の変化によるものとが混ざり合っている。ベクトル
の変化はベクトルであるが、座標系の変化によるベクトル成分の変化はベク
トルではなく 9 、従って dAµ はベクトルではない。dAµ の中から座標系の変
化によるものを取り出すには、x におけるベクトル A を「そのまま」x + dx
まで「平行移動」して、その成分を元の(平行移動する前の)成分と比べて
みれば良い。何をもって「そのまま平行移動」と言うのかは、これから定義
してやらねばならない。
「平行移動」と言う以上、2つのベクトルの和を平行
移動したものと、2つを平行移動してから和をとったものとは等しくなって
いるべきである。これは、Aµ (x) を平行移動したものが A(x) に比例してい
ることを意味する。また、時空について連続な一般座標変換を考えているの
で、平行移動による Aµ (x) の変化は dx に比例しているはずである。そこで
Aµ (x) を x + dx に平行移動したものを Aµ∥ (x + dx) = Aµ (x) + δAµ (x) と書け
ば、δAµ (x) は A(x) と dx に比例し、δAµ (x) = −Γµσρ (x)Aσ (x)dxρ という形
になっているはずである。ここに出て来た Γµσρ (x) という量は dx だけ隔たっ
た2点における座標系の変化をあらわしており、接続と呼ばれる。δAµ (x) が
ベクトルではないので、接続はテンソルではない 10 。
共変微分
dAµ から δAµ を差っ引けば、A がベクトルとして変化したことによる成分の
変化を取り出すことが出来る。このようにして得られた
DAµ (x) = dAµ (x) − δAµ (x) = (∂ν Aµ (x) + Γµσν (x)Aσ (x)) dxν
(19)
を Aµ (x) の共変微分と呼ぶ。但し dAµ = dxν ∂ν Aµ と書いた。DAµ (x) はベ
クトルであるが、dxν もベクトルなので、導関数
Dν Aµ = ∂ν Aµ + Γµσν Aσ
(20)
は2階のテンソルとなる。この式では A や Γ の x 依存性を省略している。以
降特に必要の無い限り、共変微分という言葉と共変微分の導関数と言う言葉
を区別なしに使う。スカラー ϕ の値は座標系の取り方に依らないから δϕ = 0
であり、共変微分は普通の微分に一致する:
Dϕ(x) = dϕ(x) = dxν ∂ν ϕ(x)
(21)
8 以下、必要がない限り4元ベクトルをあらわす下線を省略する。
9 次の注釈まで進むと、そのことが分かる。
10 平坦な時空(Minkowski 空間)では全ての時空点で座標系が等しく、任意の点 x で δA(x)
=0
すなわち Γ(x) = 0 である。そこでもし Γ(x) がテンソルだとすると、0 をテンソルとして変換
したものはいつでも 0 だから、平坦時空にどんな一般座標変換をしても曲線座標が得られない
ことになってしまう。
5
スカラー積 Aµ B µ はスカラーだから、
D(Aµ B µ ) = dxν (Aµ ∂ν B µ + (∂ν Aµ )B µ )
(22)
が成り立つ。ここで共変微分に対して Leibnitz 則(積の微分の公式)を満た
すことを要求する 11 。
D(Aµ B µ ) = (DAµ )B µ + Aµ (DB µ )
(23)
そうすると
(DAµ )B µ
= D(Aµ B µ ) − Aµ (DB µ )
= dxν (Aµ ∂ν B µ + (∂ν Aµ )B µ − Aµ (∂ν B µ + Γµσν B σ ))
(
)
= dxν ∂ν Aµ − Aρ Γρ µν B µ
となり、共変ベクトルの共変微分導関数に対する表式
Dν Aµ = ∂ν Aµ − Γρ µν Aρ
(24)
を得る。
一般のテンソル T µν···αβ··· の共変微分の表式も、スカラー ϕ = Aµ Bν · · · E α F β · · · T µν···αβ···
を作り、Leibnitz 則を適用して同様に求めることが出来る。その結果は次の
ようになる 12 :
Dρ T µν···αβ··· = ∂ρ T µν···αβ···
+ Γµκρ T κν···αβ··· + Γν κρ T µκ···αβ··· + · · ·
− Γκαρ T µν···κβ··· − Γκβρ T µν···ακ··· + · · ·
(25)
足が沢山付いていて覚えにくく感じるかも知れないが、微分の足は Γ の後ろ
足になる。
接続の変換
(20) 式左辺のテンソルとしての変換は
′
Dν Aµ → Dν ′ Aµ
=
=
∂xρ
∂xν ′
∂xρ
∂xν ′
′
∂xµ
Dρ A σ
∂xσ
′
)
∂xµ (
∂ρ Aσ + Γστ ρ Aτ
σ
∂x
(26)
′
と書くことが出来る。一方、(20) 式右辺は、接続の変換を Γµσν → Γµσ′ ν ′ と
11 これは平行移動による δ に対して Leibnitz 則を要求することに等しい。その結果、以下の
ρ
議論から、共変ベクトルの平行移動による変化は δAµ = Aρ Γ µσ dxσ となる。
12 反変ベクトルの共変微分(20)とスカラーに関する公式(21)とは共変微分の定義に含まれ
る。一般のテンソルに関する(25)式は、共変微分に対して Leipnitz 則を要求することと同等
である。通常 Leipnitz 則は共変微分の定義に含めて考える。
6
書けば、
∂ν Aµ + Γµρν Aρ
→
=
=
′
′
′
∂ν ′ Aµ + Γµρ′ ν ′ Aρ
(
)
′
′
∂xµ σ
∂xρ σ
µ′
∂ν ′
A
+ Γ ρ′ ν ′ σ A
∂xσ
∂x
)
(
′
′
′
∂xµ ∂xρ
∂xµ
∂xρ σ
µ′
σ
σ
′
∂
A
+
∂
A
+
Γ
A
′
′
ρ
ν
ρν
∂xσ ∂xν ′
∂xσ
∂xσ
(27)
両辺を等値すれば、∂A の項はキャンセルし、残りの部分で A が任意である
ことを用いると、
′
∂xρ ∂xλ τ
Γ
= ∂ν ′
∂xν ′ ∂xτ σρ
(
′
∂xλ
∂xσ
)
′
+ Γλρ′ ν ′
′
∂xρ
∂xσ
(28)
′
両辺に ∂xσ /∂xµ をかけて σ で和をとれば、
′
Γλµ′ ν ′
′
(
′
=
∂xσ ∂xρ ∂xλ τ
∂xσ
Γ
−
∂ν ′
′
′
∂xµ ∂xν ∂xτ σρ ∂xµ′
=
∂xσ ∂xρ ∂xλ τ
∂ 2 xτ ∂xλ
Γ σρ + µ′ ν ′
′
′
µ
ν
τ
∂x ∂x ∂x
∂x ∂x ∂xτ
′
∂xλ
∂xσ
)
′
(29)
という接続の変換則を得る。右辺第2項のためにテンソルになっていないこ
とがわかる。
1.4
局所慣性系
いま我々は一般相対論の曲線座標の中に居るのだが、その中の任意の一点
で、適当な一般座標変換によって慣性系に乗り移ることが出来ることが要請
される 13 。慣性系は座標軸が直線で与えられており、移動しても座標系が変
′
わらない。そこでの接続 Γµλ′ ν ′ のすべての成分は 0 に等しい。つまり、与え
られた接続 Γµλν に適当な一般座標変換を施して、すべての成分を 0 にする
ことが出来なければならない。これは(29)式から
∂ 2 xτ
∂xσ ∂xρ τ
=
−
Γ
′
′
σρ
∂xµ ∂xν
∂xµ′ ∂xν ′
すなわち
′
(30)
′
∂ 2 xτ ∂xµ ∂xν
(31)
∂xµ′ ∂xν ′ ∂xα ∂xβ
ということであるが、右辺は添字 α と β を入れ換えても変わらないから、こ
Γτ αβ = −
の式が成り立つためには Γτ αβ が下側の2つの添字の入れ換えに対して対称
でなければならない。逆に Γ が下足の入れ換えに対して対称であれば、
(30)
′
式を解いて変換 ∂xσ /∂xµ を求めることが出来る。このように、局所慣性系
13 自由落下する飛行機の中では(そういうものにはあまり乗っていたくないが、
)地球の重力
が消えて慣性系が実現している。
7
の存在と、下足に関する対称性は等価である 14 。我々は接続に対して次を要
請する。
Γµαβ = Γµβα
(32)
さて、計量の共変微分 Dgαβ は、局所慣性系で 0 になる。何故なら、局所
慣性系では接続の全ての成分が 0 で共変微分は普通の空間微分 d に一致する
が、局所慣性系は平坦だから gαβ = ηαβ で定数となり、空間微分が 0 となる
からである。ところが Dgαβ はテンソルであるから、一つの座標系で 0 なら
ば、そこから一般座標変換で得られる全ての座標系でも 0 となる。このよう
にして、もし局所慣性系が存在するならば、任意の座標系で
Dgαβ = 0
(33)
となることが言えた。
上で得た結果は、(25)式によれば
0 = ∂γ gαβ − Γσαγ gσβ − Γσβγ gασ
(34)
ということである。この式で α、β 、γ の添字を順繰りに入れ換えたものを作
り、微分の項を移行すると以下の3つの式が得られる:
µ
µ
∂γ gαβ = gµβ Γ αγ + gαµ Γ βγ
∂α gβγ = gµγ Γµβα + gβµ Γµγα
∂β gγα = gµα Γµγβ + gγµ Γµαβ
(35)
最後の2式の和をとり、(32)式を使うと
Γµαβ
=
1 µγ
g (∂α gβγ + ∂β gγα − ∂γ gαβ )
2
(36)
という表式を得る。右辺によって定義される量を Christoffel 記号と言う。上
式は接続が Christoffel 記号によって与えられるという意味であり、この場合
の接続を Riemann 接続という。接続が Christoffel 記号によって与えられる
ことは局所慣性系が存在することと等価である 15 。これ以降、我々の空間の
接続は Riemann 接続である として話を進める。
Christoffel 記号によって定義される
Γµαβ ≡ gµν Γν αβ =
1
(∂α gβµ + ∂β gµα − ∂µ gαβ )
2
(37)
という量も Christoffel 記号と呼ばれる。
14 別のやり方:D A
α β
− Dβ Aα という量を作ってみると、
Dα Aβ − Dβ Aα = ∂α Aβ − ∂β Aα + (Γµαβ − Γµβα )Aµ
となるが、Aα として Aα = ∂α ϕ、但し ϕ はスカラー、という形のものを選ぶと右辺の空間微
分の項は消える。左辺はテンソルであるが、平坦時空では D = ∂ なので 0 になる。従ってあら
µ
µ
ゆる座標系でも 0 である。よって Γ αβ = Γ βα が言えた。
15 須藤氏は [1] の中で、Dg = 0 と Leibnitz 則はそれぞれ独立に局所慣性系の存在と等価で
あると述べておられるが、誤解があると思われる。これらの条件の間の論理的な関係について
は、小玉氏の [2] に比較的良く書かれている。須藤氏に限らないが、最近の入門書ではこれらの
条件の他に「ベクトルの長さは、平行移動によって変化しない」という条件が持ち込まれる場合
が見受けられる。この条件は Leibnitz 則のもとで Dg = 0 と等価である。
8
(33)式は、g µν や gµν によるテンソルの足の上げ下げが D と可換だとい
うことを意味する 16 。従って
gαµ D T ···µ··· = D T ··· α ···
(38)
g αµ D T···µ··· = D T··· α ···
(39)
や
が成立する。もちろん、gµν DAν = DAµ である。
1.5
曲率テンソル
普通の空間微分は可換であるが、共変微分はいくつかの例外を除いて非可
換である。例えば Dα Dβ Aµ − Dβ Dα Aµ ̸= 0。これは共変微分の中に空間点
の関数である接続が入っているからで、空間が平坦であればこのようなこと
は起こらない。共変微分の定義から分かるように、上に書いた式の左辺の量
は Aµ に比例している。そこでこれを
Dα Dβ Aµ − Dβ Dα Aµ ≡ Rµναβ Aν
(40)
と書いて、この式で曲率テンソル Rµναβ を定義する。左辺はテンソルであり、
右辺の Aν は反変ベクトルだから、Rµναβ はこの定義によりテンソルである。
共変微分の定義に従って左辺を計算しよう。左辺の第一項は T µβ = Dβ Aµ と
いう2階混合テンソルに Dα がかかったもので、共変微分の公式(25)に従っ
て書き下す。しかる後に中味の Dβ Aµ を書き下し、第二項についても同様の
手続きを踏むと、Riemann 計量のとき以下の結果を得る 17 :
Rµναβ = ∂α Γµνβ − ∂β Γµνα + Γµσα Γσνβ − Γµσβ Γσνα
(41)
これを Riemann の曲率テンソルと呼ぶ 18 。空間のある点で局所慣性系が存
在すれば、一般座標変換によってその点での接続を 0 にすることが出来る。
しかし曲率テンソルには接続の微分が入っているので、それが 0 になるかど
16 g αβ g
α
βµ = δµ の両辺の共変微分をとり、左辺では Leibnitz 則を使い、右辺では(25)式
α = 0 となることを使うと、
から Dδµ
(33)式が成り立つ時 Dg αβ = 0 も同時に成立しているこ
とがわかる。
17 本文の方針に従って計算すると、
Dα Dβ Aµ
=
∂α (Dβ Aµ ) − Γσβα (Dσ Aµ ) + Γµρα (Dβ Aρ )
=
∂α (∂β Aµ + Γµρβ Aρ ) − Γσβα (∂σ Aµ + Γµρσ Aρ )
+Γµρα (∂β Aρ + Γρ σβ Aσ )
ここで接続の下足に関する対称性を使えば、
Dα Dβ Aµ − Dβ Dα Aµ
=
∂α (Γµρβ Aρ ) − ∂β (Γµρα Aρ )
+Γµρα (∂β Aρ + Γρ σβ Aσ ) − Γµρβ (∂α Aρ + Γρ σα Aσ )
=
Aν (∂α Γµνβ − ∂β Γµνα + Γµσα Γσνβ − Γµσβ Γσνα )
これを(40)式と較べて(41)式が出る。
18 曲率テンソルの符号を人によっては逆にとる場合があるので注意すること。例えばパウリの
教科書(「相対性理論」、講談社)では逆にとってある。
9
うかは分からない。もし全部を 0 にすることが出来れば、それはテンソルが 0
ということだから、どんな座標変換を行なっても 0 のままである。大域的に
平坦な空間では接続の微分も 0 であり、Rµναβ の全ての成分は 0 である。逆
に Rµναβ の全ての成分が 0 ならば空間が平坦であるということは、簡単では
ないが数学的に証明することが出来る。このように、空間が曲がっているか
どうかということは、テンソル量が 0 であるかどうかで表され、座標の取り
方に依らない性質である。19
Rµναβ の上足を下げて全部の足を共変にしたテンソル Rµναβ ≡ gµσ Rσναβ
を定義すると、これは次のように書ける 20 :
Rµναβ
1
(∂ν ∂α gµβ + ∂µ ∂β gνα − ∂µ ∂α gνβ − ∂ν ∂β gµα )
2
(
)
=
+gρσ Γσνα Γρ µβ − Γρ µα Γσνβ
(42)
この表式から、足の入れ換えに対して以下の対称性があることが分かる:
1)
Rµναβ = −Rνµαβ
(43)
2)
Rµναβ = −Rµνβα
(44)
3)
Rαβµν = Rµναβ
(45)
4)
Rµαβγ + Rµβγα + Rµγαβ = 0
(46)
Rµναβ は、1)前足について反対称、2)後足についても反対称、3)前2
足と後2足の入れ換えについては対称、そして4)後3足の循環和は 0 にな
る 21 。
(時)空間の次元を n とすると、Rµναβ には n4 個の成分があるが、こ
れらの条件により独立成分の数は
n2 (n2 − 1)
12
(47)
19 Riemann 接続の場合、
(41)式から曲率テンソルは計量とその微分で与えられることが分
かる。これは、n 次元空間の幾何学を調べるのには n 次元空間の計量だけが必要であり、その
他の、例えば平坦な n + 1 次元空間を用意するといった必要が無いことを意味している。普通
我々は、2 次元曲面を調べる場合に平坦な3次元空間の中でその曲面を考えるが、計量さえ与え
れられればそのようにする必要は無いのである。この事実はガウスの「驚異の定理」と呼ばれ
る。[参考:吉田伸夫「量子宇宙論入門」講談社、2013年]
20 (37)式の表現を使うと、
(41)式から
Rµναβ
≡
=
gµσ Rσναβ
∂α Γµβν − ∂β Γµαν − (∂α gµσ )Γσβν + (∂β gµσ )Γσαν
+Γµσα Γσβν − Γµσβ Γσαν
ここで(34)式を使えば
=
∂α Γµβν − ∂β Γµαν − (Γσµα + Γµσα )Γσβν + (Γσµβ + Γµσβ )Γσαν
+Γµσα Γσβν − Γµσβ Γσαν
=
∂α Γµβν − ∂β Γµαν + Γσµβ Γσαν − Γσµα Γσβν
接続の微分のところに Christoffel 記号の表式(37)を陽に使うと
)
1(
∂α ∂ν gµβ − ∂α ∂µ gβν − ∂β ∂ν gµα + ∂β ∂µ gαν
=
2
+Γσµβ Γσαν − Γσµα Γσβν
これは(42)式に他ならない。
21 これらの条件は全てが独立という訳ではない。例えば条件1)が2)と3)に含まれるのは
明らかである。また条件3)が他の3条件に含まれることは以下のようにして示される。まず条
10
となる 22 。我々が考えている(時)空間は4次元なので、独立成分の数は 20
である。
Rµναβ の足の一組を縮約 23 して得られる2階の共変テンソル
Rαβ = Rσασβ
(48)
を Ricci テンソルと言う。このテンソルは足の入れ換えについて対称である:
Rαβ = g σρ Rρασβ = g σρ Rσβρα = Rρβρα = Rβα
(49)
この式の最初の等号で Rρασβ の足についての対称性1)、2)、3)を考える
と、Rαβ が Rρασβ の縮約をとって得られる唯一の独立なテンソルになってい
ることが分かる。他の縮約の取り方で得られるのは 0 か −Rαβ だけである。
(41)式から Ricci テンソルのあらわな表式を書き下せば、
Rαβ = ∂σ Γσαβ − ∂β Γσασ + Γσρσ Γρ αβ − Γσρβ Γρ ασ
(50)
これをさらに縮約したものがスカラー曲率である:
R = g αβ Rαβ = g αβ g µν Rµανβ
(51)
この節の最後に、Riemann テンソルが次の重要な Bianchi(ビアンキ)恒
等式を満たすことを述べておく。
Dγ Rµναβ + Dα Rµνβγ + Dβ Rµνγα = 0
(52)
測地線
2
2.1
幾何学的な定義
時空の中に一本の曲線を考える。この曲線上を動く点の位置が、ある連
続パラメタ τ によって xµ (τ ) とあらわされているとしよう。uµ = dxµ /dτ
件4)の添字を書き換えて得られる4本の恒等式
0 = Rαβµν + Rαµνβ + Rανβµ
0 = −Rβαµν − Rβµνα − Rβναµ
0 = −Rµναβ − Rµαβν − Rµβνα
0 = Rνµαβ + Rναβµ + Rνβµα
の和をとる。次にその得られた式に条件1)と2)を適用することによって条件3)が導出され
る。
22 まず条件1)を考えると、前側2つの足 µ と ν はそれぞれ n 個の値を取り得るが、この条
件から独立成分に対しては µ < ν の場合だけを考えれば良いことが分かる。そのような場合の
数は p = n(n − 1)/2 である。条件2)から後2足のペアについても同様に p 個の選び方があ
る。前後のペアの選び方について条件3)を入れると、独立な選び方は p(p + 1)/2 個ある。条
件4)では、後3足のセット {α, β, γ} について、そのうちのどれか2つが等しい場合は、これ
までに考えた3条件に帰着する。前足 µ が後3足のうちのどれかと等しい場合についても、前
の3条件に含まれる。したがって条件として独立なのは4つの足が全部異なる場合で、そのよう
な足の選び方は n C4 通りある。そこで Rµναβ の独立な成分の数として
n2 (n2 − 1)
p(p + 1)
− n C4 =
2
12
を得る。
23 テンソルの一組の上足と下足を揃えてその足について和をとること。
11
は、この曲線の点 P(τ ) における接ベクトルである。uµ を、曲線上の隣の点
xµ (τ + dτ ) = xµ (τ ) + uµ dτ まで平行移動すると、1.3 節でやったように uµ
には
δuµ = −Γµσρ uσ dxρ
(53)
という量が加わる。もしも uµ + δuµ が τ + dτ の点での接ベクトル uµ + duµ
に一致しているとすると duµ = δuµ すなわち
duµ + Γµσρ uσ uρ dτ = 0
(54)
が成り立つ。接ベクトルが常にその平行移動に等しいような曲線のことを測
地線と言う。この曲線上の点は
d2 xµ
dxσ dxρ
+ Γµσρ
=0
2
dτ
dτ dτ
(55)
という方程式を満足する。スカラー uµ uµ は平行移動によって変化しないか
ら、測地線上の一点で uµ が時間的(空間的)であれば、他のあらゆる点で
の uµ も時間的(空間的)である。そのような測地線は時間的(空間的)測地
線と呼ばれる。同じように、uµ が光的である場合の測地線は光的測地線であ
る。測地線が時間的である場合、我々はパラメータ τ として曲線に沿った固
有時間を選ぶことが出来る。
2.2
変分法による定義
曲線のパラメータ τ を dτ だけ変化させたときに曲線上を動く点が移動し
た「長さの2乗」は
dxµ dxν 2
dτ
(56)
dτ dτ
で与えられる。点 A と点 B を結ぶ曲線の中で測地線と呼ばれるものは、A か
ら B に至る「長さの2乗」の合計が、曲線の変分 δ に対して極値をとるもの
ds2 = gµν
のことを言う。すなわち、測地線に対して
∫
∫
B
B
ds2 = δ
0=δ
A
lg (x, ẋ)dτ 2
(57)
A
但し、dxµ /dτ = ẋµ と書いて x と ẋ の関数
lg (x, ẋ) = gµν (x)ẋµ ẋν
(58)
を定義した。lg の変分をとれば
δlg (x, ẋ) =
∂lg
∂lg d µ
∂lg
∂lg
δ(ẋµ ) + µ δxµ =
δx + µ δxµ
∂ ẋµ
∂x
∂ ẋµ dτ
∂x
(59)
であるが、積分の始点 A と終点 B で δxµ = 0 という条件があるので(57)
式は
∫
B
0=
A
[
]
∂lg
d ∂lg
+ µ δxµ
−
dτ ∂ ẋµ
∂x
12
(60)
δxµ は任意だから
d ∂lg
∂lg
−
=0
µ
dτ ∂ ẋ
∂xµ
(61)
(58)式より
∂lg
= 2gµν ẋν ,
∂ ẋµ
∂lg
= (∂µ gρσ )ẋρ ẋσ
∂xµ
(62)
(63)
代入すると
0
d
(2gµν ẋν ) − (∂µ gρσ )ẋρ ẋσ
dτ
= 2gµν ẍν + 2(∂σ gµν )ẋν ẋσ − (∂µ gρσ )ẋρ ẋσ
=
= 2gµν ẍν + (∂σ gµρ + ∂ρ gµσ − ∂µ gρσ )ẋρ ẋσ
= 2gµν ẍν + 2Γµρσ ẋρ ẋσ
(64)
従って
ẍµ = −g µν Γνσρ = −Γµσρ ẋσ ẋρ
(65)
となって測地線の方程式(55)が出て来る。
メカルト図法の地図に描かれた航空路線を見て、何故こんな曲線になって
いるのだろうと思ったことはないだろうか。航空路線は大体地球表面上の2
点を結ぶ最短距離になっており、地球儀の上に描かれたものを見るとまこと
に分かり易い。
(55)式であらわされる曲線は、メカルト図法中の航空路線の
ようなものなのである。
2.3
自由な粒子の運動
慣性系の中で粒子が外力を受けずに自由に運動しているとする。この粒子
の運動の世界線は慣性座標系の中で直線である。粒子の世界線に沿った固有
時間を τ と書き、世界線上の粒子の(時空)座標を X µ (τ ) とすると、粒子の
運動方程式は
d2 X µ
=0
dτ 2
で与えられる。いま、この慣性座標系から一般座標変換
dX µ → dxµ =
∂xµ
dX ν
∂X ν
(66)
(67)
を行なうと
d2 xµ
d
=
2
dτ
dτ
[
∂xµ dX ν
∂X ν dτ
]
=
∂ 2 xµ dX σ dX ν
∂X ν ∂X σ dτ dτ
(68)
ここで(31)式を使うと
d2 xµ
dxα dxβ
= −Γµαβ
2
dτ
dτ dτ
(69)
これは測地線の方程式(55)に他ならない。逆にある点での世界線が測地線
で与えられ、その点で局所慣性系が存在するならば、その点での運動は慣性
13
系に移ると自由粒子の運動に一致している。 等価原理によれば、重力の作
用は加速度系に乗り移ることによって消し去ることが出来る。
運動方程式(66)は
∫
δ
dτ = 0
(70)
に対応している。ただし、積分の境界での変数の変分は 0 である。慣性系
では gµν = ηµν であり、(cdτ )2 = ηµν dX µ dX ν = ηµν dU µ dU ν (dτ )2 、但し
U µ = dX µ /dτ 、だから
∫ √
∫ √
dxµ dxν
dX µ dX ν
δ
ηµν
dτ = δ
gµν (x)
dτ = 0
dτ dτ
dτ dτ
√
(71)
の中味は値としては c2 である。ηµν は定数なので Lagrangian が速度にし
か依存せず、変分を実行すれば(66)式が出てくる。gµν は強調して書いたよ
うに座標に依存するので、Lagrangian から一般化力が出て来る。それが()
式の右辺である。
2.4
ニュートン極限
(69)式で与えられる運動はどのようなものであろうか。
(69)式の空間成
分は
d2 x
dxα dxβ
↑
=
−Γ
αβ
dτ 2
dτ dτ
(72)
時空が平坦に近く、
gµν (x) = ηµν + hµν (x) ,
|hµν | << 1
(73)
と書けたとしよう。 このとき Riemann 接続(36)は h の一次まで残せば
Γµαβ
1 µγ
η (∂α hβγ + ∂β hγα − ∂γ hαβ )
2
=
(74)
粒子の速度が充分小さいとする。これは、粒子の四元速度を dxµ /dτ = uµ =
c(γ, γβ) と書けば、|β| << 1、γ ∼ 1 + O(β 2 ) だから、dxµ /dτ の空間成分
の大きさが時間成分 dx0 /dτ = u0 = cγ ≈ c に比べて充分小さいということ
である。これはまた、この系を流れる時間を t と書けば、dx0 = cdt だから
dτ ≈ dt ということでもある。そこで
d2 x
dt2
≈ −Γ↑ 00
=
dx0 dx0
≈ −c2 Γ↑ 00
dτ dτ
c2
(∂0 h0↑ + ∂0 h↑0 − ∂↑ h00 )
2
(75)
ここで第三の仮定を置く:h の時間的変化は充分小さくて |∂0 h0↑ | << |∂↑ h00 |。
そうすると結局、
d2 x
c2
≈ − ∂h00
2
dt
2
ということになる。
14
(76)
Newton の力学では、重力ポテンシャル VG (x) 中にある重力質量 mG をも
つ質点は F G = −mG ∂VG の力を受け、その運動方程式は
m
d2 x
= −mG ∂VG
dt2
(77)
で与えられる。ここで m は慣性質量であり、不可思議なことに m = mG で
ある。その結果、
d2 x
= −∂VG
(78)
dt2
ということになるが、これは VG = (c2 /2)h00 であれば(76)式と同じである。
計量仮説
2.5
このように、測地線の方程式(69)はある極限(Newton 極限)のもとで
ニュートンの重力を包含している。特に m = mG という条件を自動的に満た
している。そこで重力とは、その中の粒子の運動が(69)式で与えられるよ
うなものだ、という仮説を置きたくなる。この仮説は等価原理を満たす。
「重力の作用は計量によってあらわさられる」という仮説を「計量仮説」と
言う。
Einstein 方程式
3
3.1
Einstein テンソル
計量仮説を受け容れたとして、計量 gµν はどのようにして決まるのだろう
か。一般相対性原理から、gµν を決める方程式はテンソル方程式でなければ
ならない。この方程式の左辺は gµν で決まるあるテンソルになっているはず
である。
1
Gµν = Rµν + gµν R
(79)
2
を、Einstein テンソルと言う 24 。この形は2階のテンソルが以下の要請を満
たすことと等価である。
a) Minkowski 計量 gµν = ηµν のとき 0
b) Gνµ = Gµν
c) gµν とその微分だけから構成され、高々2階の微分を含む。
d) 2階微分については線形
e) Dν Gµν = 0
24 多くの一般相対論の教科書では
gµν の符号の取り方がこことは逆なので注意されたい。
15
3.2
エネルギー運動量テンソル
宇宙を構成する粒子の分布。運動状態を含む。重力だけなので、エネルギー・
運動量の分布がわかれば良い。T µν の内訳:
• T 00 エネルギー密度 /c(eV/c/m3 )
• T i0 運動量密度の第 i 成分 (eV/c/m3 )
• T 0j xj 軸に垂直な単位面積を単位時間 ×c 当たりに出て行くエネルギー
/c (eV /c/m2 /(cs) = eV /m3 /c2 [c])
• T ij xj 軸に垂直な単位面積を単位時間 ×c 当たりに出て行く運動量の第
i 成分 (eV /c/m2 /(cs) = eV /c2 /m3 [c])
エネルギー・運動量テンソルは対称(に選ぶことが出来る)。エネルギー・運
動量の保存:
Dν T µν = 0
(80)
Tµν = (ρ + p)uµ uν + pgµν
(81)
完全流体:
3.3
Einstein 方程式
Gµν = κTµν
(82)
Newton 極限をとると、R00 が ∂ 2 ϕG と結びつけられ、Newton 力学におけ
る重力場の方程式 ∂ 2 ϕG = 4πGρ、但し ρ は質量密度、G は重力定数、から
κ = 8πG と決まる。c の冪で次元を合わせれば、
Gµν =
8πG
Tµν
c4
(83)
これが計量によってあらわされる重力と物質の分布を結びつける Einstein 方
程式である。
3.4
宇宙項とダークエネルギー
Einstein 方程式(83)は定常宇宙を解として持たない。定常宇宙が出て来
るべきだと信じた Einstein は、Gµν に対する要請 a) を壊し、
(79)式の代わ
りに定数 Λ を導入して
1
Gµν = Rµν + gµν R − gµν Λ
2
(84)
とすることによって定常宇宙を得た。この定数 Λ を宇宙項という。時代が進
むと宇宙は定常でなく、Hubble 膨張していることが分かって来た。さらに要
請 a) を捨てたということは、物質が存在せず(83)式の右辺が 0 の時、時空
が平坦にはならないということを意味しており、
「不自然」に思える。これら
16
の状況から、宇宙項を入れることは間違っているのではないかという考えが
主流となって行った。Einstein 本人も宇宙項を入れるアイディアは間違いで
あっととして後になってこの案を撤回した。
ところが近年、宇宙の膨張の仕方が Hubble のように一定でなく、加速し
ているように見えるということが観測から分かって来た。Gµν を(84)式の
ように変えるのではなく、(83)式で右辺の Tµν を
Teµν = Tµν + gµν Λ
(85)
という量で置き換えれば比例定数を除いて宇宙項を入れたのと同じことであ
る。この場合、物質が無ければ Tµν = 0 であるが、
(83)式の右辺に登場して
e
時空を決めているエネルギー・運動量テンソル Tµν は 0 でない。物質のない
真空がエネルギー・運動量テンソルをもっているという言い方が出来る。粒子
の速度が充分小さいとき、エネルギー・運動量テンソルの空間対角成分は圧
力に対応している。弱い重力の作用しかない空っぽの空間で、Λ を正の定数
とすれば Teii ≈ ηii Λ < 0 だから、真空の空間には負の圧力、すなわち膨張力
が作用していることになる。そこで近年(21世紀初頭)の宇宙論では、観
測で見つかった宇宙の加速膨張をこの膨張力で説明しようとする試みが主流
となっている。本質的には定常宇宙を与えるのとは違う値をもった宇宙項を
入れただけのことであるが、加速膨張する宇宙を説明するために真空がもっ
ていることになるエネルギーのことをダークエネルギーと呼ぶ 25 。
具体例
4
4.1
定数計量
ds2 = gµν dxµ dxν
(86)
で gµν が座標に依らない定数の場合、Christoffel 記号の全ての成分は 0 とな
り、Riemann テンソルも全ての成分が 0 となる。Riemann テンソルの縮約で
定義される Ricci テンソルもスカラー曲率ももちろん 0 である。この空間は
平坦である。
明白なユークリッド空間の場合以外の例として2次元円筒面がある:
ds2 = a2 dθ2 + dz 2
(87)
また Minkowski 時空も平坦な空間の例であるが、それは極座標表示では次の
ようにあらわせる:
ds2 = dt2 − dr2 − r2 (dθ2 + sin2 θdϕ2 )
但し c = 1 としない単位系では、第一項は c2 dt2 となる。
25 スター・ウォーズの映画が出来た頃にはこの話はまだ無かった。
17
(88)
4.2
2 次元球面
Riemann テンソルの独立成分の数は 1。球の半径を a とすれば、
ds2 = a2 dθ2 + a2 sin2 θdϕ2
(89)
gϕϕ = a2 sin2 θ
(90)
gθθ = a2 ,
gµν は対角形なので逆行列を直ちに書き下すことが出来て、
g θθ = 1/a2 ,
g ϕϕ = 1/(a2 sin2 θ)
(91)
gµν の空間微分で 0 でないものは唯一
∂θ gϕϕ = 2a2 sin θ cos θ = a2 sin 2θ
(92)
Christoffel 記号 Γµαβ で µ = θ のとき 0 でないのは
1
Γθϕϕ = − a2 sin 2θ
2
(93)
µ = ϕ のとき 0 でないのは
1 2
a sin 2θ
(94)
2
Christoffel 記号の 0 でない成分はこれで全部である。Christoffel 記号のどの
Γϕθϕ = Γϕϕθ =
成分が 0 にならないかは、
()式を見ながら頭の中で考えるのだが、空間の次
元数が増えてくるとそれでは困難になる。(91)式より
1
Γθϕϕ = g θµ Γµϕϕ = − sin 2θ , Γϕθϕ = Γϕϕθ = cot θ
(95)
2
Riemann テンソルは、独立成分の数は 1 なので、0 にならないものを1つだ
け計算すればよい。
Rθ ϕθϕ = ∂θ Γθϕϕ − Γθϕϕ Γϕϕθ = − cos 2θ + cos2 θ = sin2 θ
(96)
Rθϕθϕ = gθµ Rµϕθϕ = a2 sin2 θ
(97)
Rϕϕ = g σρ Rσϕρϕ = g θθ Rθϕθϕ = sin2 θ
Rθθ = g σρ Rσθρθ = g ϕϕ Rθϕθϕ = 1
(98)
σρ
Rθϕ = g Rσθρϕ = 0
Rαβ の計算は、Riemann テンソルのどれが 0 にならないかを見る必要がある。
R = g αβ Rαβ = g θθ Rθθ + g ϕϕ Rϕϕ = 2/a2
(99)
測地線の方程式を gµν から直接求めてみる。Lagrange 関数は
lg = gµν (x)uµ uν ,
uµ = dxµ /ds
(100)
で与えられる。今の場合、θ̇ = dθ/ds、ϕ̇ = dϕ/ds と書けば、共通の定数は落
とせるので
lg = θ̇2 + sin2 θ ϕ̇2 ,
(101)
2
(102)
2θ̈ = 2 sin θ cos θ ϕ̇
d
(2 sin2 θϕ̇) = 0 ⇔ ϕ̈ = −2 cot θθ̇ϕ̇
ds
これらから(95)式の結果が直接読み取れる。
18
(103)
4.3
2 次元トーラス面
トーラス半径 b、リング半径 a とすると
ds2 = a2 dϕ2 + (b + a sin ϕ)2 dθ2
gϕϕ = a2 ,
gθθ = (b + a sin ϕ)2 ,
gothers = 0
(104)
(105)
但し θ はトーラス軸の回りの角度、ϕ はリング中心を回る角度である。Lagrange
関数は
lR = a2 ϕ̇2 + (b + a sin ϕ)2 θ̇2
(106)
そこで、
0
0
(
)
)
δlR
δlR
d (
−
=
2(b + a sin ϕ)2 θ̇
δθ
dτ
δ θ̇
= 4a(b + a sin ϕ) cos ϕ ϕ̇θ̇ + 2(b + a sin ϕ)2 θ̈
2a cos ϕ
⇔ θ̈ = −
θ̇ϕ̇ = −Γθθθ θ̇2 − Γθϕϕ ϕ̇2 − 2Γθθϕ θ̇ϕ̇
b + a sin ϕ
a cos ϕ
⇔ Γθθϕ =
, Γθothers = 0
b + a sin ϕ
d
dτ
=
(
δlR
δ ϕ̇
)
=
d
dτ
⇔
ϕ̈ = a−1 (b + a sin ϕ) cos ϕ θ̇2
−
(107)
δlR
= 2a2 ϕ̈ − 2a(b + a sin ϕ) cos ϕ θ̇2
δϕ
= −Γϕθθ θ̇2 − Γϕϕϕ ϕ̇2 − 2Γϕθϕ θ̇ϕ̇
Γϕθθ = −a−1 (b + a sin ϕ) cos ϕ ,
⇔
Γϕothers = 0
(108)
0 でない曲率テンソル。
Rθ ϕθϕ
= −∂ϕ Γθθϕ − Γθθϕ Γθθϕ
=
=
[
]2
a sin ϕ(b + a sin ϕ) + a2 cos2 ϕ
a cos ϕ
−
(b + a sin ϕ)2
b + a sin ϕ
a sin ϕ
b + a sin ϕ
Rθϕθϕ = a sin ϕ(b + a sin ϕ)
4.4
(109)
(110)
球対称 3 次元空間
ds2 =
dr2
+ r2 (dθ2 + sin2 θdϕ2 )
1 − Kr2
(111)
ṙ2
+ r2 (θ̇2 + sin2 θϕ̇2 )
1 − Kr2
(112)
Lagrange 関数:
lg =
さっきやったのと同様にすれば良い。練習として残しておく。
19
4.5
Schwaltzshild 解
球対称
(
ds2 =
1−
2GM
r
)
dt2 −
dr2
− r2 (dθ2 + sin2 θdϕ2 )
1 − 2GM/r
(113)
通常の単位系で言えば G = 重力定数 /c2 、t = c× 時間 = x0 と書いている。
g00 = gtt /c2 であるが、以下の gtt は g00 と書くべきかも知れない。
gtt = 1 − 2GM /r , grr = −1/(1 − 2GM /r) ,
gθθ = −r2 , gϕϕ = −r2 sin2 θ
(114)
gµν = ηµν + hµν に当てはめると、h00 = −2GM/r である。G が c2 で割って
あることに気をつけると、ニュートン極限でのポテンシャルが ϕG = −GM/r
となりニュートンの重力ポテンシャルに一致していることがわかる。
RS = 2GM ≈ 3Km(M/MSun ) を Schwaltzshild 半径と呼ぶ。r = RS で
g00 = 0, grr は発散する。これは座標系の取り方によって出て来た特異点で、
真性ではない。r = 0 は真性特異点になっている。
(
)
RS
dr2
2
ds = 1 −
dt2 −
− r2 (dθ2 + sin2 θdϕ2 )
∗ 26 (120)
r
1 − RS /r
26 Lagrange
関数:
lg =
”共役運動量 ”
:
)
(
RS
ṙ2
− r2 (θ̇2 + sin2 θ ϕ̇2 )
1−
ṫ2 −
r
1 − RS /r
(116)
(
)
π t = 2 1 − RrS ṫ
π r = −2ṙ/(1 − RS /r)
π θ = −2r2 θ̇
π ϕ = −2r2 sin2 θ ϕ̇
(117)
)
(
S
ṙṫ
π̇ t = 2 1 − RrS ẗ + 2R
r2
r
π̇ = −2r̈/(1 − RS /r) + 2RS ṙ2 /[r2 (1 − RS /r)2 ]
π̇ θ = −2r2 θ̈ − 4rṙθ̇
π̇ ϕ = −2r2 sin2 θ ϕ̈ − 4r sin2 θ ṙϕ̇ − 4r2 sin θ cos θ θ̇ϕ̇
(118)
”運動量 ”の時間微分:
”一般化力 ”
:
∂lg /∂t = ∂lg /∂ϕ = 0
∂lg /∂θ = −2r2 sin θ cos θ ϕ̇2
∂lg /∂r = RS r−2 ṫ2 + RS ṙ2 /[r2 (1 − RS /r)2 ] − 2r(θ̇ 2 + sin2 θ ϕ̇2 )
(119)
運動方程式:
)
(
S
ṙṫ
0 = π̇ t − ∂lg /∂t = 2 1 − RrS ẗ + 2R
r2
t
2
⇒ Γ tr = −RS /[2r (1 − RS /r)] , Γtothers = 0
0 = π̇ ϕ − ∂lg /∂ϕ = −2r2 sin2 θ ϕ̈ − 4r sin2 θ ṙϕ̇ − 4r2 sin θ cos θ θ̇ ϕ̇
⇒ Γϕrϕ = −1/r , Γϕθϕ = − cot θ , Γϕothers = 0
0 = π̇ θ − ∂lg /∂θ = −2r2 θ̈ − 4rṙθ̇ + 2r2 sin θ cos θ ϕ̇2
⇒ Γθrθ = −1/r , Γθϕϕ = sin θ cos θ , Γθothers = 0
0 = π̇ r − ∂lg /∂r = −2r̈/(1 − RS /r) + 2RS ṙ2 /[r2 (1 − RS /r)2 ] − RS r−2 ṫ2
−RS ṙ2 /[r2 (1 − RS /r)2 ] + 2r(θ̇ 2 + sin2 θ ϕ̇2 )
= −2r̈/(1 − RS /r) − RS r−2 ṫ2 + RS ṙ2 /[r2 (1 − RS /r)2 ]
+2r(θ̇ 2 + sin2 θ ϕ̇2 )
⇒ Γrtt = −RS (1 − RS /r)/(2r2 ) , Γrrr = RS /[2r2 (1 − RS /r)]
Γrθθ = r(1 − RS /r) , Γrϕϕ = r sin2 θ(1 − RS /r) , Γrothers = 0
20
(120)
光の世界線は ds2 = 0 を満たすが、動径方向(dr > 0, dθ = dϕ = 0)へ進む
(dt > 0)ものについては
RS
dr
=1−
dt
r
光が r から Rs + ϵ < r まで進むのに要する時間
∫ RS +ϵ
dr
t=
1 − RS /r
r
4.6
(121)
(122)
Robertson-Walker 計量
一様等方宇宙
ds2 = c2 dτ 2 = c2 dt2 − a2 (t)γij dxi dxj ,
g00 = 1 ,
gij = −a2 (t)γij ,
∂t γij = 0
g0i = 0
(123)
(124)
但し x0 = ct とする。γij は対称とする。ẋ = dx/dτ と書けば
lg = (ẋ0 )2 − a2 (t)γij ẋi ẋj
∗ 27
(
)
dx2
2
2
2
2
2
2
2
ds = dt − a (t)
+ x (dθ + sin θdϕ ) ,
1 − Kx2
∫ x
dx
√
χ=
1 − Kx2
0
(
)
ds2 = dt2 − a2 (t) dχ2 + x2 (χ)(dθ2 + sin2 θdϕ2 ) ,
(130)
(131)
(132)
(133)
宇宙論へ
5
ここまで進んだ諸君は、一般相対論の教科書はどんなものでも楽に読み進
めることが出来るだろう。但し注意しなければならない点が一つある。それ
は計量 gµν の符号で、この資料では多くの教科書で用いられているものとは
逆にとられている点である。どうしてそうなっているかと言うと、平坦時空
の極限で gµν は Minkowski 計量となるが、その Minkowski 計量の符号を高
エネルギー粒子反応で良く用いられる、p2 = gµν pµ pν = m2 となるもの、つ
27
π 0 = 2ẋ0
π i = −2a2 γij ẋj
(126)
π̇ i = −4aȧẋ0 γij ẋj − 2a2 (∂l γij )ẋl ẋj − 2a2 γij ẍj
(127)
∂0 lg = −2aȧγij ẋi ẋj
(128)
∂i lg = a2 (∂i γlm )ẋl ẋm
(129)
但し ȧ = ∂0 a。
0
=
ẍ0 + Γ000 (ẋ0 )2 + Γ00i ẋ0 ẋi + Γ0ij ẋi ẋj
=
ẍ0 + aȧγij ẋi ẋj
⇔
Γ000 = Γ00i = 0 ,
21
Γ0ij = aȧγij
(130)
まり時間的ベクトルの2乗が正となるもの(Bjorken-Drell metric と呼ばれ
る)にしているからである。粒子反応の場合と一般相対論をやる場合で計量
の符号を変えるという立場もあるだろうが、最近の素粒子理論では曲がった
時空中での粒子反応を扱う機会も増えて来ており、講義資料としての統一性
の観点からも、ここでは計量の符号は Bjorken-Drell で統一することにした。
宇宙論については、最近出版された教科書の多くでは後半に関連する章が
設けられているので、各自それで勉強して欲しい。その場合の基礎となるの
は、前章の最後に挙げた Robertson-Walker 計量である。但し、宇宙論はま
だ進展中の領域であり、最先端の話題については著者の立場によって見解が
異なる事項も多くある。それらについては、一冊の教科書にかかり切りにな
るのは危険である。図書室へ行って5∼6冊の教科書を集め、勉強したい事
項について教科書を縦断することを薦める。
参考文献
[1] 須藤靖,「一般相対論入門」(日本評論社、2005)
[2] 小玉英雄,「相対性理論」(培風館、物理基礎シリーズ6、1997)
[3] 冨田憲二,「相対性理論」(丸善、パリティ物理学コース、1990)
[4] ランダウ・リフシッツ,「場の古典論」(恒藤敏彦、広重徹訳、東京図書出
版、理論物理学教程、1978)
[5] W.パウリ,「相対性理論」(内山龍雄訳、講談社、1974)
[6] 内山龍雄,「一般相対性理論」(物理学選書15、裳華房、1978)
[7] Steven Weinberg, ”Gravitation and Cosmology”(John Wiley & Sons、
1972)
22
© Copyright 2026 Paperzz