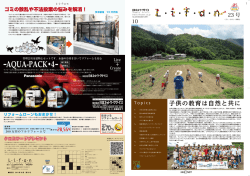
ハイブリッド・デジタルカメラの開発とイメージンセンシングへの応用 東京電機大学大学院理工学部 建設工学専攻 近津研究室 ○金子 順紀 上基準点を不要とするオンサイト・キャリブ 1.はじめに 写真測量におけるアナログからデジタルへ レーション手法に関する検討を行い、本シス の変化はフィルムから CCD センサへの変遷 テム HDC のイメージセンシングへの応用性 であり、フィルムの現像及びプリントという を検討することとする。なお、HDC による 従来のフィルムカメラでは避けられなかった 応用事例として東京電機大学本館 1 階部分の 時間的損失が解消され、リアルタイムな画像 3 次元計測および 3D モデリングを行った。 取得が可能となった。特に最近では、センサ 技術の飛躍的な発展により CCD センサの高 2.計測システム 解像度化が急速に進み、多種多様な高解像度 民生用デジタルカメラが発売されており、高 解像度民生用デジタルカメラによる簡便なデ ジタル写真測量の実用化が多くの分野におい て期待されている。 このようの背景から、筆者らはこれまでに 高解像度民生用デジタルカメラのデジタル写 真測量への応用を検討し 1)、さらには民生用 デジタルカメラによるデジタル写真測量用ソ フトウエア『3DiVision』の開発を行ってき 図1 ハイブリッド・デジタルカメラ た2)。しかしながら、 『3DiVision』も含めて、 図 1 に本研究で開発した画像計測システム 現在の多くの手法では内部標定要素は予め取 HDC の外観を示す。本システムは図 2 のシ 得されている必要があり、さらに対象物に対 ステム構成図に示すように、レーザー距離計 する実座標を取得するためには対象空間上に の光軸が 2 つのミラーを介してデジタルカメ 縮尺距離、あるいは標高基準点が必要とされ、 ラの光軸と一致するように設置されており、 これらの拘束が民生用デジタルカメラによる 図 3 に示した 2 軸回転が可能な専用三脚に据 簡便なデジタル写真測量の実用化へのボトル え付けることにより、デジタルカメラから計 ネックとなっている。 測点までの正確な斜距離を測定することがで そこで本研究では民生用 300 万画素デジタ きる。さらに、PC、モニターを一体化させた ルカメラ、レーザー距離計および PC を一体 ことにより、ビデオキャプチャボードを介し とした画像計測システム、ハイブリッド・デ てリアルタイムに画像を取得し、オンサイ ジ タ ル カ メ ラ ( HDC; Hybrid Digital ト・キャリブレーションおよび対象物の3D Camera)を開発し、上記拘束条件および地 計測が可能な環境を構築した。 サイト・キャリブレーション手法は HDC に より得られた距離を拘束条件として、左右の ステレオ画像を同時に調整するもので、左右 のカメラ位置の 3 次元座標 ( X 0 L , Y0 L , Z 0 L , ) 、 Laser Mirror Mirror ( X 0 R , Y0 R , Z 0 R , ) 、 左 右 の カ メ ラ 姿 勢 ( ω L , ϕ L , κ L )、( ω R ,ϕ R ,κ R )、カメラの焦 点距離 f 、主点位置 x 0 , y 0 、ディストーショ ン係数 k1 センサから画面座標への変換係数 Laser Range Finder Digital Camera Video Capture Board 量となる。 Mother Board に利用される距離が計測された測定対象空間 Center of Projection Distance a1 , a2 および擬似基準点の3次元座標が未知 なお、擬似基準点とはキャリブレーション 内の点であり、オンサイト・キャリブレーシ Battery Image ョンのためには測定対象空間内に 6 点以上の 擬似基準点が必要であり、この場合 30 個の Output PC Monitor 図2 システム構成図 未知量に対して 36 個の条件式が得られるこ ととなる。 4.精度検証 本研究では画像計測システム HDC のイメ ージセンシングへの応用を検証するために、 図 4 に示すテストターゲットのステレオ撮影 を行い、計測された 42 点の黒丸に対する 3 次元座標の精度検証を行った。 なお、このテストターゲットは縦 1.80m、 横 1.55m、奥行き(中央2列)0.33m であり、 図3 専用三脚 等間隔に縦7個、横6個の黒丸を貼り付けた ものであり、さらに各黒丸の中心には図 5 の なお、本計測システムでは撮影部のデジタ ように反射シールが貼り付けられており、こ ルカメラに『OLYMPUS C-3040(314 万画 の反射シールの中央を一級トータルステーシ 素)』、距離測定部のレーザー距離計に『 Leica ョン(距離精度±1mm、角度精度±2?)を用い LDS-1(距離精度 40mまで±3mm)』、画像の て計測した結果を各黒丸の真値とした。 出力にはビデオキャプチャボード『 IO-DETA 各テストターゲットの画像座標は、撮影し USB-CAP2 』 お よ び P C に は PentiumⅢ た画像に二値化処理を施して黒丸の部分のみ 850Hz の CPU を使用した。 を抜き出し、その黒丸の中心を面積重心とし て求めたものである。 3.カメラキャリブレーション 本研究で開発した画像計測システム HDC による地上基準点の設置を必要としないオン ステレオ撮影における撮影状況は表 1 に示 す。 よりカメラキャリブレーションを行い、33 点 の測点に対して平均二乗誤差(RMSE2)を 求めた結果である。 表2より平面・奥行き精度ともに画像計測 システム HDC による結果は従来の基準点を 用いるバンドル調整法による結果よりも僅か ながら低い値となった。この理由としては、 HDC による結果は測定距離の精度、さらに 光軸とレーザー軸一致に不完全性と推測され るが、本研究で開発した画像計測システム 図4 テストターゲット全景 HDC は地上基準点設置作業の必要ないこと、 およびオンサイト3D計測が可能であること を考慮するとデジタルカメラを用いたイメー ジセンシングへの応用にとって有効な手法で あると考えられる。 5.応用事例 画像計測システム HDC のイメージセンシ ングへの応用例として、東京電機大学本館一 図5 テストターゲット拡大図 階部分(図 6)の 3 次元計測および 3D モデ リングを行った。 表1 撮影高度 撮影状況 なお、本研究では計測した 3 次元座標を 左カメラ 右カメラ 3.720m 3.791m 基線長 1.500m 基線比 0.400 表2 3DCG ソフトに入力し、ワイヤーフレームモ デルを作成した後、テクスチャマッピングを 行った。作成したワイヤーフレームモデルお よびテクスチャモデルを図 7、8 にそれぞれ 示す。 検証結果 平面精度 奥行き精度 RMSE1 2.30mm 1.91mm RMSE2 0.55mm 0.95mm 一方、表 2 は HDC によりオンサイト・キ ャリブレーションを行い、42 点の測点に対し て平均二乗誤差(RMSE1)を求めた結果と 基準点9点を用いて従来のバンドル調整法に 図6 東京電機大学本館一階 参考文献 1)中田隆司、近津博文;デジタル写真測量か らみた 300 万画素デジタルスチルカメラの精 度検証、日本写真測量学会平成 12 年度秋季 学術講演会論文集、pp283−286、2000 2) 中田隆司、近津博文; 民生用デジタルカ 図7 ワイヤーフレームモデル メラを用いた三次元計測シス 3DiVision の開発、日本写真測量学会平成 14 年度秋季 学術講演会論文集、2002 3)国井洋一、近津博文、村井俊治;民生用デ ジタルカメラにおける解像度の変遷、写真測 量とリモートセンシング、40 巻 6 号、pp55 −59 4)解析写真測量委員会編、解析写真測量、日 本写真測量学会発行、1983 図8 テクスチャモデル 6.結論と今後の課題 本研究ではデジタルカメラを用いた簡便な 3D計測を目的にレーザー距離計、デジタル カメラおよび PC を一体化したハイブリッ ド・デジタルカメラ HDC の開発を行い、こ れを用いてデジタルカメラのイメージセンシ ングへの実用化のボトルネックであった拘束 条件を不要とするオンサイト・キャリブレー ション手法の有効性を検証した。 ハイブリッド・デジタルカメラ HDC を使 用することにより、従来多大な労力と時間を 要していた地上基準点設置が不必要となり、 オンサイト・キャリブレーションが可能とな り、さらにはオンサイト・モデリングをも可 能であることを考慮すると、HDC はイメー ジセンシング分野において有効なシステムで あると考えられる。しかしながら本システム の実用化のためには計測システムの改善、精 度向上およびオンサイト・モデリング手法の 確立が今後の課題である。 5)動体計測研究会編、イメージセンシング、 日本測量協会発行、1997
© Copyright 2026 Paperzz