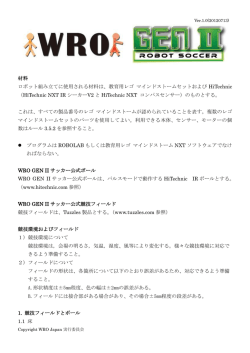
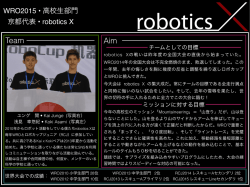
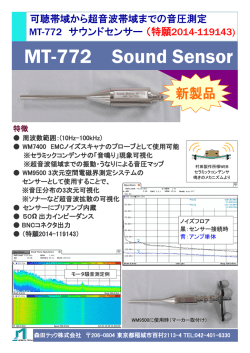
WRO Japan in EHIME 2015 レギュラーカテゴリー エキスパート部門 高校生ルール Mountaineering Ver2.4 2015/7/24 序章 今年のテーマは ”登山” 、選手は様々な環境について調査、研究する ” Robt Explorers” を作り上げ、未知の地形から手がかりを探 ってゆかなければなりません。 様々な困難を乗り越えミッションクリア目指し頑張ってください ※このルールは世界大会のルールに準拠し、WRO Japan in EHIME 実行委員会が独自に策定したもので 全国大会、世界大会のルールとは異なる。 変更履歴 2015/5/20 Ver2.1 2015/5/20 Ver2.1 2015/5/20 Ver2.1 6.2 組み立て調整、メンテナンス時間 決勝時間削除 今までの通り 7.5 マップキー 図表更新 9.5 フィールド寸法 カラーキーの扱いに関して修正 修正前 ・ラインと色は印刷されたものをフィールドに貼り付ける。ただし、カラーキーが置かれる場所だけ切り取られている ・カラーキーはフィールドに貼り付けられる素材と同じものに印刷される。 修正後 ・ラインと色は印刷されたものをフィールドに貼り付ける。 ・カラーキーはフィールドに貼り付けられる素材と同じものに印刷される。 ←削除 2015/5/26 Ver2.2 9.5 フィールド寸法 カラーキーの扱いに関して修正 修正前 ・ラインと色は印刷されたものをフィールドに貼り付ける。 修正後 ・ラインと色はカラーシートをフィールドに貼り付ける。 2015/5/28 Ver2.3 9.4 山ユニット図面 修正前 ※各層の高さは 25mm、山頂高さは 250mm、山頂にある穴は 40mm×40mm ←削除 修正後 ※各層の高さは 25mm、山頂にある穴は 40mm×40mm 2015/7/24 Ver2.4 1.コート図表変更 コート上のラインの統一 変更図表 7.1,9.2 2. 9.5 フィールド寸法 修正前 ・ラインと色は印刷されたものをフィールドに貼り付ける。 ・落下ガードはテーブル面から 300mm とするが、寸法、素材に関しては透明度も含めどのようになるのか規定は ない ← 削除 修正後 ・ラインと色、カラーコードは印刷されたものをフィールドに貼り付ける。 チャレンジ概要 1 全体ルール規定 1.1 ルール適用期間 このルールは WRO Japan in EHIME 2015 中四国高校予選会開催期間中のみ適用される。 1.2 開催概要 この大会は人材育成を目的とした小中高校生へ向けた国際的なロボット大会である WRO の中四国エリア高校生予選会 です。WRO の趣旨として、だれでもが参加しやすい競技会とするため、WRO で認定された世界共通の市販ロボットキットを 利用すること。中四国予選会の運営は、NPO 法人 WRO Japan より認定された WRO Japan in EHIME 実行委員会及 び運営ボランティア等から構成される競技委員(審判、審査員を含む)により運営され、競技ルールは WRO Japan 2014 公式ルールに準拠した上で、予選会開催のための追加変更を行ったものとする。 1.3 サプライズルール サプライズルールは大会当日朝、文面および口頭にて参加者へ向け告知される。 1.4 大会参加資格 1.4.1 年齢規定 区分 詳細 "Elementary School age" 生年月日が 2003 年 4 月 1 日以降で小学校に在籍している事。 小学生 "Junior High School age" 生年月日が 2000 年 4 月 2 日~2003 年 4 月 1 日の間で 中学生 中学校に在籍している事。 "High School age" 生年月日が 1997 年 4 月 2 日~2000 年 4 月 1 日の間で 高校生 高校及び高等専門学校に在籍している事 “University” 生年月日が 1993 年 4 月 2 日~1997 年 4 月 1 日の間で 大学生・高専・専門学校生 大学、高専、専門学校に在籍している事 ※WRO Japan in EHIME2015 中四国高校予選会レギュラーカテゴリーでは高校生のみ対象とし、高等専門学校の場 合第3学年までとします。不明な場合は事前に実行委員会までお問い合せください。 なお,WRO Japan 中四国高校予選会にて WRO 全国大会参加チームに選抜された場合,中四国エリア代表チ ームとして WRO 全国大会に必ず参加すること。 1.4.2 チーム構成 チームには必ず成人以上のコーチを 1 名必須とし、2 名もしくは 3 名の選手で構成されることとする。 そのため、コーチ 1 名、選手 1 名のチーム、また、3 名以上の選手を含むチームも認めない。ただし 1 校で複数チーム 参加する場合、コーチは兼任を認める。 1.5 選考対象 WRO Japan in EHIME 2015 中四国高校予選会では以下の競技を行い WRO 全国大会参加チームを選考します。 高校生部門:エキスパート : Mountaineering 高部門部門:ベーシック : 詳細はベーシック部門ルール参照。 ※全国大会ルールに準ずる。 同時開催されるエキシビションに関しては、予選会のみの対応で選抜対象ではない。 1.6 プレゼンシート 中四国大会ではプレゼンシートをレギュラーカテゴリー、ベーシック部門参加のマシンの紹介資料として使用します。掲示場所 は車検エリアの各マシン置き場所で片面 A4 縦のサイズとし、指定のフォームに沿って指定された日までに提出すること。白黒・ カラーの制限はありません。掲示内容は下記の通りとする。 ・高校名 : 所属高校名を明記してください。作成に関して特に制限ありませんが 特殊なフォントを利用した場合レイアウトが崩れる可能性があります、ご容赦ください。 特殊なフォント利用の際には PDF などでフォントがない環境でも印刷できるデータ作成 をお願いいたします。 ・ロボット名(チーム名) : 別途運営側で高校名、ロボット名に関して共通の名札はこちらで準備します。 ・特徴 : 簡潔にわかりやすく記載すること。 このプレゼンシートの内容に関して、競技成績に何ら反映させることはしませんが、提出は必須であり、未提出の場合、競技 の採点を行いません。ご注意ください。 2 機材利用規約 2.1 使用機材 WRO2015 では、特に教育用のセットだけではなく現在まで市販されている全ての LEGO 部品が使用できる。ただし社外品 のセンサーの利用には制限がある。巻末の「WRO2015 レギュラーカテゴリー使用可能モーター及びセンサー一覧」参照。また 制御用ソフトウェアに関しては下記の通り。 認定制御ソフトウェア Robolab NXT Software EV3 Software LabView ※高校生のみ ※例年通り Java、C++等、上記以外の環境利用は不可とする。 2.2 選手準備物 各チームでパソコン、ロボット、及びスペアは各チームで準備すること。作業用ブースとして机及びコンセント 2 口を準備するが、 パソコンおよびネットワーク環境の準備はしない。 2.3 トラブルの際の対応 どんな事故や設備不調の場合であっても参加機材の維持交換に責任を持たない。スペアは各チームで準備すること。 3 ロボットに関する規定 3.1 サイズ 組み立てられた機体は一辺 250mm の立方体からはみ出てはいけない。またスタート後機体独自の機構としてその枠を超 える形に変形しても良い。 3.2 部品の固定 どの部品の固定に関しても、テープ、接着剤、ねじの使用は一切禁止とする。指摘後改善無ければ資格剥奪とする。 3.3 使用コントローラの数 コントローラ RCX/NXT/EV3 の利用は 1 チーム 1 台のみとする。 3.4 モーター・センサーの利用 ロボットに使用するモーター及びセンサーの数は利用できる範囲であれば種類、個数に制限はない。 ※最終ページ「WRO2015 レギュラーカテゴリー使用可能モーター及びセンサー一覧」参照 3.5 競技中のロボットの扱いに関して 競技中ロボットに対していかなる干渉もしてはならない、この規則に違反する場合失格とする。当然無線(Bluetooth/Wi-fi)、 有線、赤外線含めた外部よりの操作も全て認めない。プログラムのダウンロードは USB 端子経由のみとする。 3.6 事前組立 事前組立は不可。分解した状態で当日参加すること。ただし組立の参考になる写真、映像などの資料の利用は可とする。 4 競技前の注意 4.1 選手は受付後、所定のメンテナンスエリアで競技準備できるが、主催者がアナウンスするまで組み立て作業に入れない。 4.2 競技者は組立時間の間指定された場所で競技の準備をする事が出来る。また組み立て時間開始のアナウンスがあるまでコ ースに触れる事は認めない。 4.3 5 審判による車検のため車検エリアに機体を置いてから競技まで、審判の指示無い限り選手は機体に触れることはできない。 ジャッジルール 5.1 最終決定権 審判長が大会開催中最終的な権威とする。 審判の決定を受け入れる事が出来ない場合、審判長が最終判断を行う。最終決定は変えられない。 5.2 スコアの異議申し立て 異議のある場合スコアシートにサインする前か、審判がブースを去る前に審判に申し立てする事。 サイン済みのスコアシートは変更できない。 サインする前に明確な間違いがあればサイン前に審判へ向けてその場で告知する事。 スコアシートにサインをするか、審判が競技場から去った後得点の変更は受け付けない 5.3 審判制度の受け入れ 以上 WRO での審判制度を受け入れる事が出来ないチームは参加すべきではない。 6 競技運用に関して 6.1 競技構成 レギュラーカテゴリー・エキスパート部門は予選ラウンド、準々決勝、準決勝、そして決勝で構成される。予選ラウンドのベストス コアでベストエイト選抜を行い、これ以降は上位勝ち抜け戦を行い最終の優勝を決定するものとする。 6.2 組み立て調整、メンテナンス時間 選手は下記の通り組み立て調整・メンテナンス時間以外で機体に触れてはならない。 組み立て調整 競 メンテナンス時間 6.3 技 120 分 第 1 回目予選 1 : :Qualifying rounds1 60 分 第 2 回目予選 2 : Qualifying rounds2 車検エリア 選手は機体の組み立て調整・メンテナンス許可時間が終わった後は、作業途中であっても機体を車検エリアに置かなければ ならない。いったん車検エリアに置いた機体は各選手の競技時間および競技終了後組み立て調整・メンテナンス時間が来るま で審判以外触れることはできない、そのためバッテリーの交換、プログラムの修正など事前に完了しておくこと。 6.4 違反の修正 車検の際に違反が見つかった場合その修正のため 3 分間の時間が与えられるが時間内に修正できない場合失格とし時間 延長も認めない。 6.5 競技の開始 競技の準備ができ次第ロボットをベースエリアに設置し、審判の合図に従って、スタートスイッチの押下のみでロボットをスタート させること。スタート実施後選手は一切ロボットに触れてはいけない。競技中ロボットに触った時点でギブアップしたものとみなす。 6.6 時間計測 審判の開始の合図で計測を開始し、ロボットがベースエリアに戻り、静止後 3 秒間過ぎたとき終了とする。 審判により計測時間行われ、それ以外の計測結果は利用しない。なおギブアップの場合競技時間は 2 分とする。 6.7 取得ポイントの決定 各試合終了またはギブアップしたとき審判によってその時点までのポイント計算を行う。その際問題が無ければ審判によって結 果が記入されたスコアシートに速やかにサインをする事。 6.8 採点スコア 予選終了時点での最も良い方のスコアよってベストエイトを選抜する。同点の場合順位は時間で決定する。 予選以降、準々決勝、準決勝、決勝では各 1 回のみの結果で勝敗を決める。 6.9 禁止事項 ●コースや、関連部材及びその他チームのロボットの破壊 ●競技に影響を与える可能性がある機材、もしくは競技への妨害や干渉と判断される機材の利用 ●他のチーム選手や、審判、観客に対しての暴言、行為 ●選手の競技場内での携帯電話の使用、有線/無線 LAN の使用、飲食 7 競技内容 今年のチャレンジは ”登山”。 厳しい環境の中、冒険し与えられたミッションをこなす ”Robt Explorers” を造り上げることがテーマ になる。冒険者は未知の環境の調査を通して手がかりを探しだす必要がある。その探検には常に危険がつきまとい、冒険者は自分の 身を守らなくてはならない。 7.1 スタートエリア ロボットはスタート時、コート中央の平面部分に配置しなくてはいけない。その際カラーベース、およびカラーベース上にある山 には触れることはできない。 ロボットのスタート、ゴールエリア および Map Key 置き場 7.2 運搬ターゲット 山ユニットの位置は変わらないが、その向きによって運搬ターゲットの配置が変わる。 国際大会ルール参照 http://www.wro2015.org/regularhighschool.php 競技ごとに山ユニットの向きはランダムに設定され、それに連動しそれぞれの山ユニットの向きに合わせて運搬ターゲットの設 置場所が変わる。またその場所は競技開始前に決定される。 7.3 フィールド構成とカラーキューブ フィールド中央に、図のように 8 枚の 32mm×32mm の大きさのカラーキーを配置したものを指定位置に貼り付けたものを マップキーと呼び、おのおの山の方向と、ターゲットになるカラーキューブの場所が示されている。 Q4 Q3 カラーキューブの Q2 配置 Q1 O4 O3 O2 O1 山ユニットの 配置 7.4 山ユニット 山の色は時計回りの順番で右上を起点として赤、青、緑、黄色となる。おのおのの山ブロックは通常フィールド四隅が頂上に なるように配置されるが。山ユニットは、山頂がフィールド四隅にある自然な状態か、山頂が隣の山ユニット近づくように 90 度回 転させたもう一つの状態で配置されその向きは競技ごとに決定される。山ユニットの 4 枚のカラーキーは対応する山の方向を示 す。 7.5 マップキー カラーキーによってカラーキューブの位置が示される。たとえばカラーキーの 8 枚中 5 枚目のシールの色が赤の山ユニットの場 所(Q1) に置かれるカラーキューブの色を指定しており、同様に 6 枚目が青の山ユニット位置(Q2)、7 枚目が 緑、そして 8 枚 目が黄色の山ユニットのキューブ配置場所に置かれるカラーキューブの色になる。 標準的な構成の場合と下記図のような場合、山ユニット配置およびカラーキューブの配置は下記の通りとなる 標準的な配置 右図の配置 ← ブロックが置かれている場所 Q4 Q3 ← ブロックが置かれている場所 Q2 ← ブロックが置かれている場所 Q1 ← ブロックが置かれている場所 Q4 ← 向きが変わっている Q3 7.6 ブロック位置情報 山の状態情報 Q2 ← 向きが変わっている Q1 ← 向きが変わっている ミッション 冒険者としてのロボットの使命は、同じ色の山のできるだけ高い位置にカラーキューブを運ぶことで、頂上にある穴にカラーキュ ーブを挿入できれば最高点が与えられる。 7.7 判定 最終の判定は審判により行われる。 7.8 競技終了条件 試合は下記の条件で終了する。 a) 競技開始された後、チームメンバーがロボットに触れた場合 b) 競技時間が 2 分を超えた場合 c) ロボットがフィールド上から離れた場合。 d) 規約違反があった場合 8 スコアリング スコアは競技が終了するか競技時間を超えた時点で計算される。 ・カラーキューブが同色山ユニットのベース区域に置かれた場合・・・・・・・・・・・・・・・・・・・10 point ・カラーキューブが同色山ユニットの傾斜部分に置かれた場合・・・・・・・・・・・・・・・・・・・・25 point ・カラーキューブが同色山ユニット山頂に穴に入っていない状態で置かれた場合・・・・・・・50 point ・カラーキューブが同色山ユニット山頂にある穴に入れられている場合・・・・・・・・・・・・・100 point ・得点の最大を 400 point とする ・複数チームが同点の場合、ミッションのクリア時間で勝敗が決定される。 9 フィールド 9.1 Game Table 平面レイアウト Lego Bright Yellow (ID 24) Pantone 116C Lego Bright Green (ID 37) Pantone 355C 9.2 Game Table 3D レイアウト 9.3 フィールド平面寸法 Lego Bright Red (ID 21) Pantone 032C Lego Bright Blue (ID 23) Pantone 293C 9.4 山ユニット図面 ※各層の高さは 25mm、山頂にある穴は 40mm×40mm 9.5 フィールド寸法 ・フィールド外寸は 2,400mm×1,200mm ・フィールド周辺の壁は厚さ 17mm、高さ 50mm ・ラインと色、カラーコードは印刷されたものをフィールドに貼り付ける。 ・カラーキューブは一般的な 2×4 の LEGO ブロックで作られ、接着されていない。 ・カラーキューブは、山ユニットのベースにある交差点に置かれる。 9.6 カラーキューブ カラーキューブ組立図 6×300121 6×200137 6×200123 6×200124 9.7 カラー情報 Color Name Bright RED Bright Blue Bright Yellow Bright Green Redish Brown Maersk Blue LEGO Color ID Pantone C M Y K R G B 21 032C 0 100 100 0 237 28 36 23 293C 100 47 0 0 0 117 191 24 116C 0 19 100 0 255 205 3 37 355C 88 0 100 0 0 172 70 192 499C 32 80 95 50 105 46 20 QC #MSK001 63 2 15 2 76 187 208 RGB Sample 10 WRO 2015 中四国高校予選会およびエキシビション使用可能モーター及びセンサー一覧 9842 NXT Motor with Tacho 9843 NXT Touch Sensor 9844 NXT Light Sensor 9845 NXT Sound Sensor 9846 NXT Ultra Sonic Sensor 9694 NXT/EV3 Color Sensor 45502 EV3 Large Motor 45503 EV3 Medium Motor 44504 EV3 Ultrasonic Sensor 44506 EV3 Color Sensor 44507 EV3 Touch Sensor 44509 EV3 Infrared Sensor 45505 EV3 Gyro Sensor HiTechnic RCX/NXT/Ev3 Color Sensor V2 ※センサー、モーターに関して上記の通りだがその他の構成パーツは現在まで市販されているものは全て利用できる。 社外品センサーの利用は HiTechnic 社のカラーセンサーのみ。
© Copyright 2026 Paperzz