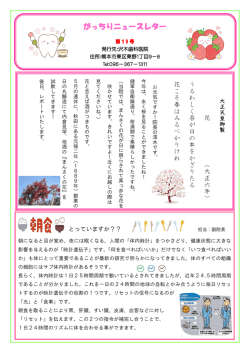
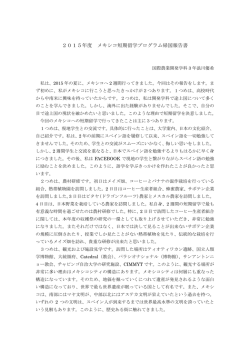
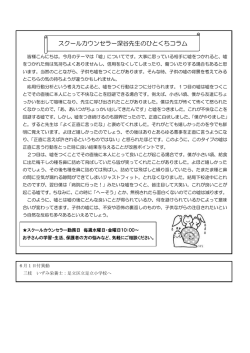
ヒト四肢の機構特性を考慮した設計の提案 大阪電気通信大学 藤川 智彦 准教授 研究のねらい ヒトが活動する場において、ヒトの運動特性を明らかにすることは非常に重要なことである。しかし、現状で はヒトの運動を支える筋力とその運動効果を明確に定義できていない。この大きな要因に機械機構には存在しな い、ヒトや動物特有の駆動機構である二関節筋の存在が挙げられる。この二関節筋は2つの関節に同時に関与す る筋であり、この二関節筋が収縮すると、一方の関節に協同的に働くとき、もう一方の関節には拮抗的に働く機 能を有している。このため、二関節筋は機械運動の観点からヒトの運動の主働筋であるにも関わらず、冗長な機 能として定義され続けている。しかし、この二関節筋の存在に着目し、ヒト四肢の筋配列を基準にした新たな解 析をおこなうことにより、ヒト四肢の運動特性が徐々に明らかになっている。そこで、この二関節筋を含めたヒ ト四肢の筋配列による運動機能を明示することにより、ヒトが生活する環境において、最も使い易く、最も適切 な場所を提示できると考えている。このように、従来の手法とは異なる筋配列の機構特性による運動評価が本研 究のねらいである。 新規技術の概要と特徴 ヒトの四肢の筋配列の機構的機能一例を示す。ヒト四肢の筋配列を最も単純化すると、筋肉は収縮しかできな いため、拮抗筋ペアとして存在し、各関節の一関節筋ペアと、その両端の関節に関与する二関節筋ペアの図1の 三対6筋の筋構成となる。なお、ヒトを模倣したロボットなどのリンクモデルは各関節の一関節筋に対応する関 節トルクのみを発生する機構となる。このヒト四肢の筋配列のモデルと一般的なリンクモデルのそれぞれの先端 に負荷を与えた場合、二関節筋が存在するヒトの四肢モデルでは負荷に対して先端が追従し、その反力を発生さ せることができるが、一般的なリンクモデルの場合では負荷に対応できず、支点から先端が滑りだすことが明ら かになった。この原理を簡単に示したものが図2であり、三対6筋の筋配列のモデル先端では各筋に対応した三対 のバネが配置された機構に近似できる。これより、ヒト四肢では赤色の二関節筋のバネがあるため、体幹と先端 を結ぶ方向の負荷に柔軟に対応できることがわかる。しかし、赤色の二関節筋が無い一般的なリンク機構では負 荷に対する反力方向が負荷方向と一致しないことは明らかである。このように、ヒトの運動特性は筋配列の機構 特性の影響を受け、一般的なリンク機構の特性と大きく異なることがわかる。 ヒト四肢 二関節筋 移動 反力 負荷 二関節筋に対応するバネ 二関節筋バネ 三対6筋 反力方向 移動方向 弾性楕円 移動 リンクモデル 負荷 反力 図1 ヒト四肢と一般的なリンクモデルの 機構的差異による運動特性の相違 図2 ヒト四肢が先端の負荷に対応できる 機構的機能の簡易図 二関節筋 上肢の運動評価 期待される連携・応用分野 ヒト四肢の運動を構成する筋配列は図3のような主働筋によっ て構築されている。この筋配列のように、上肢および下肢とも二 関節筋があり、ヒトの運動に大きく関与していることは明らかで ある。そこで、本研究の筋配列の機構特性を考慮した解析により、 従来の関節トルクのみに着目した解析と異なる、新たなヒトの運 動評価を明示できると考えている。さらに、この評価を用いるこ とで、ヒトの生活環境の向上におけるものづくり、すなわち、ヒ トにとって理論的に使い易いもの、および、その使用環境などの 提示が可能であると考えている。 三対6筋 二関節筋 三対6筋 下肢の運動評価 図3 ヒト四肢運動機能の評価 けいはんな学研都市ヘルスケア研究シーズ 無断転載禁止
© Copyright 2026 Paperzz