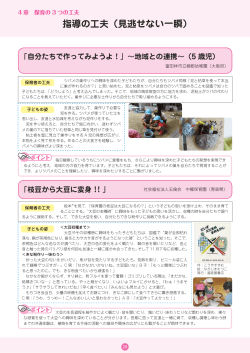
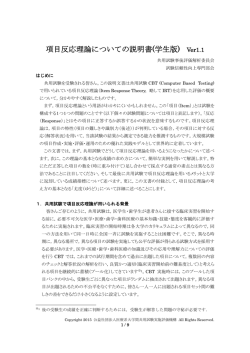
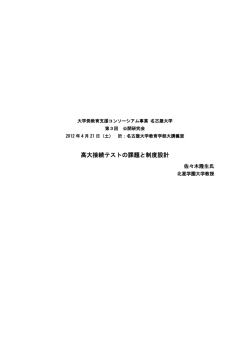
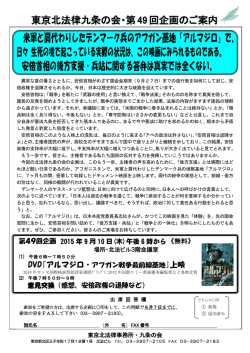
東京大学 IRT 研究機構、3 つのロボット技術を発表 少子高齢社会をロボット技術で支えることをプロジェクトテーマに掲げる 「東京大学 IRT 研究機構」は、 2008 年 10 月に発 表した車輪移動型の双腕ヒューマノイドロボット「ホームアシスタントロボット」による掃除片付け技術に続いて、 12 月ま でに 3 つのロボット技術を追加発表した。発表されたロボットは、パーソナルモビリティ (1 人乗りの移動ロボット)、思い 森山 和道(サイエンスライター) 出し支援ロボット、キッチンロボットの 3 種類。それぞれ紹介する。 パーソナルモビリティ 親指コントローラ 思い出し支援技術は 1)日用品を物品認 識し、収納場所などをデータベースに記 パーソナルモビリティは高齢者の移動支 憶する技術、2)広視野多重解像度カメラ 援を目的に開発されているロボット。屋内 とロボットが人の行動を認識する技術の 2 用と屋外用の 2 種が発表された。 つからなる。物品の認識にはビジョンが使 屋外用パーソナルモビリティは、時速 6km の走行が可能で、重量は 150kg。 ハンドル ブレーキ をベースにセンサー類を追加、IRT 研究機 構が開発した新制御技術を搭載したもの。 トワーク経由で 56CPU からなる PC ク ラスタに送って画像を処理する。そして 3 2007 年 12 月に発表されたトヨタの倒 立 2 輪型のパーソナルモビリティ 「モビロ」 われている。特徴点を抽出し、それをネッ 操縦用のコントローラ。手関節で回転させて操 作することで、ハンドルの役割をする。親指コ ントローラで、前後方向の速度切替や、前後左 右の操縦を行う。 ∼ 4 秒後に随時システムに送り返し、ロ ボットがそれに応じて行動を実行するとい う流れだ。今の PC クラスタの性能だと、 3 次元物理モデルを使い、前後左右の揺れ 百数十程度の物品を認識できるとのこと をそれぞれ個別に制御するのではなく 1 だ。 ビジョン情報収集にはロボットに搭載 つのものとして制御できるようになった。 それによって斜面や段差、凹凸がある場所 されているカメラだけではなく、各引き出 全体の安定性が増した。搭乗者の負担の少 しの上にもカメラを設置し、各カメラは ない手首の回内・回外運動を使った操縦系 変化が起こるたびに撮影してデータベース を独自に開発した。 に送る。物体の認識には回転やスケール、 屋内タイプのパーソナルモビリティは 照明などが変化しても変わらない SIFT 660 × 640 × 1,300mm(幅×奥行き× (ScaleInvariant Feature Transform)特 高さ) 、重量 45kg。座面下に 6 軸力セン 徴量を使っている。床にはパッシブ RFID サーを内蔵し、座面上での体重移動を検 が埋設されており、ロボットとスリッパに 知して任意の方向に動くことができる。こ アンテナと読み取り装置を搭載。これによ れによって両手が空くことがメリットだ。 り、ロボットや人の位置を検出していた。 ヘッドレスト部分にはカメラも内蔵してお 新規に開発されたロボットは、見守りロ り、オプティカルフローを使って人のジェ ボット「Mamoru」君。動き検出、パター スチャー認識をし、それに応じて対面者に ンマッチング計算において汎用 PC の 6 近寄っていくといった動作も可能となって いる。本体後方にも下方向に向けられたカ メラを備え、こちらのカメラでは床面の模 様をマーカーとして認識することでグロー バル座標を獲得し、自律移動できる。 屋内用パーソナルモビリティ。人が座っている かどうかを認識して、その搭乗者の重心位置や 座面との接触状況などから操縦意図を推定し、 体の動きだけで操縦することができる。 ロボットによる「思い出し」支援技術 各ロボットについて紹介しよう。照明ロ 屋外用パーソナルモビリティ。 48 倍の高速処理性能を持つ富士通のビジョン ボードを使っている。カメラは、光学系は 1 つなのだが、広視野、中心部など異なっ た解像度を持った複数の画像をハードウェ アで分離してボードに送る機能を持つ。ま た聴覚として 16 チャンネルのマイクを持 ち、スピーカも備える。 ボットによる「思い出し」支援技術は、ロ たとえば「Mamoru 君」は顔パターンの ボットと、広視野で多重解像度を持った 知覚、立体視を使った顔と手の注視、奥行 環境カメラを連携させることで、日常の き比較を統合することができる。これらの ちょっとした物品の置き場所や薬の飲み忘 技術によって、薬を飲んでいる人を見守 れなどの「思い出し」を支援する技術を開 り、薬箱を持ってきたこと、飲もうとして 発したというもの。高齢者支援を目的とし いることを視覚で認識し記憶することがで ている。 きる。この技術は株式会社富士通研究所と ROBOCON Magazine 2009.2 P48P49_62_東大IRT.indd 48 09.1.30 1:07:39 PM
© Copyright 2026 Paperzz