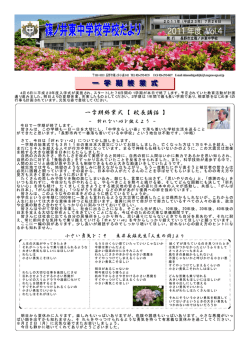
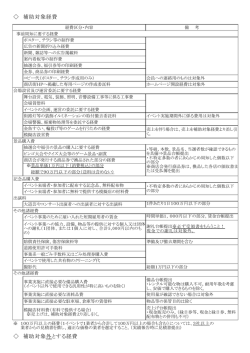
計測自動制御学会東北支部窮161回研究集会(1998.6.28) 資料番号161−8 位相補償蕃を絆属細LたIIR鮎フィルタの鮒 AStudYOn=RAdaptiveF主IterPlacedinCascadewjthAPhaseC叩enSatOr 0工藤嵩昌●, 田所義昭−● YosbiakiTadokoro●− 0恥riⅡa日aIhdoll●, =豊橋技術科苧大字 ■八戸高専 ■Hachinohe陶tionalCollege of Tech..+■ToyohaBhiUniversity of Tech, キ←ワNド:適応フィルタ(adaptive fi】ter).エコーキヤンセラ(echo c且Il亡el]er),出力誤差法(outpqt errorJ)ethロd), 方程式輿差法(eq皿tiom errロr nethod),高速再伸最小二乗法(f且如reⅢエー5i叩1e摘t Squ且門耶th8d) 遠路先:〒039−11八戸市田面木上野平16−1八戸高専 電気工学科 tel:01T8」HL7281,fax:017B−27−9379,eTAail:k11dohk−e馳achimohe−Ct.aC.jp を考慮している。 1.はじめに 2.適応フィルタの構成 近年、ディジタル借号処理技儲やLSI化技術 の発展に伴い適応ディジタルフィルタの検討が活 ⅠIR適応フィルタの構成としては、図1に示 発に行われている。拡声通信系や長距離竜詔回線 で使用きれる適応ディジタルフィルタでは、未知 すような方程式誤差型と出力誤差型が提案きれて 系のインパルス応答長が数百ミリ秒以上と非常に 長い1)。 いる‖。園1.(a)の方程式誤差型の適応ディジタ ルフィルタは、入力翫、未知轟からの出力dk、誤 適応ディジタルフィルタにおいては、(1)入力悟 差飢とすると、伝達関数耶五)はA(五)/(ト且(わ)であ 号が音声慣号のように有色信号である場合適応パ る。血に観測雑音が含まれる時推定パラメータに ラメータの収束速度が遅い,(2)未知系のインパル バイアスが生じるという問題点が指摘されている ス応答長が長い場合に回路規模および適応パラメ ータ更新の演算ょが増加する,等の解決策を検討す ることが課題である。(1)の課題に対しては、時間 額城東いは直交変換領域で入力信号の直垂化を行 うことを基本にして多くの試みがなされている2I、 ‖。(2)に対してはⅠIR型で推定系を構成する検 討が行われている1)。 本稿では、回路規模削減、安定化、適応速度向 上の目的で、推定系となるⅠIRディジタルフィ ルタを2次の縦席接続からなるものとし、全域通 過型フィルタにより位相補償を行う構成を検討し たので報告する。尚、本稿での適応ディジタルフ 囲1.(a)方程式誤差型の構成 ィルタの構成は、双方向通信(通話)系への適用 − 1 が疇】、dkを直接フィルタリングすることでFIR このような音響的反射蹟のインパルス応答長は数 型でありながら、伝達関数の極を構成できるため、 FIR適応フィルタで検討きれている係数更新法 百ミリ秒以上と非常に長い。前述したように、回 路規模および適応パラメータ更新の演算呈の低減 をほぼモのまま用いることができること、安定性 のため推定系をⅠIR型で構成することが必要に が保証できること等の特徴かち広く用いられてい なる。また、双方向通信(通話)轟であるため、 るp 両側同時発声および対向側からの売声が当然起こ り得、この時には、適応パラメータの.更新処三哩を 図1.(b)に同じ伝達関数の出力誤差型の構成を 示す。安定性の問親あること、適応アルゴリズム 行わず、出力誤差法のように未知轟からの受信信 が適応パラメータ自身による再帰的なフィルタリ 号に肘しフィルタリング処理を行わない構成が必 ング処理で求めるら1という問題点があるため、あ 要となる。このため、適応パラメータ更新時には まり積極的には用いられていない。 方程式誤差型とし、それ以外の時には出力誤差型 への切り替えが可能な構成をとる。 + 4.適応フィルタの構成 4.1適応フィルタの構成 囲1.(8)の方程式誤差型の時刻kにおける誤差 ekは、A(ヱ),8(z)が(1)式で表されいると、(2)式 のようになる。尚、A(ヱ),B(E)の次数はそれぞれ M,Nとする。 M 園1.(b)出力誤差型の構成 A(z)=呂aiヱ ̄‘ ‡(1) 3.適用瑠境 l・ B(カ=呂hz ̄i 適応ディジタルフィルタを拡声通信系や長距離 M (2) 騒=dL−正一忘aiXk−i 電話回線等の双方向追憶系に適用する場合につい て説明する。園2に拡散通悟系で双方向通話を行 う場合の例を示す。送話側Aから受話側8への通 未知轟からの出力dkをフィルタリングする部分 話を考えると、B側のスピーカ等から出力された は伝達関数が(1一頃ヱ))であり、3.で述べたのよ 信号は室内の壁の音響的反射路を経てマイクに入 うに出力誤差型に切り替えることを考慮すると、 力きれ再びA側にエコー信号として戻ってくる。 方程式誤差型で更新処理を行っている過程で最小 位相特性、つまり、零点がヱ平面上の単位円内に あることが必要である。2次のディジタルフィル タでは、その係数値により最小位相の判定が容易 であるため、(ト封E))の部分を(3)式のように2次 のディジタルフィルタの縦属接続で構成する。尚、 LはⅣ/2である。 L l ̄B(z)=酎1−α甘l一βiZ ̄り(3) 囲2.適用する項境の例 2 固3の三角形内部に欄が存在する場合、 (1−αl五 ̄1−βlZ一望)が最小位相になる。 義1,零点と極の配置 零点 薩 囲3の嚢妃 四 −1±j 卜1±j)/2 破線 ヱ) 1±j (1±j)/2 実線 ■−・llt / . ■コ ノ ′ \1 ノ. / ▲.‘ / 11 11− ヽ−・l ′ /′ / ノr ∩リ 、 \ 、 ′ .′ 、 ∩− ノ′ 図3.最小位相の範囲 ︻層忠臣安登P畳 境界:1租 巨宮 ﹁l ■LJ つん 其 ⊂:コ:眞なる虚根 ′ ノ. ヰ.2全域通過型フィルタによる位相補償 \、/′■ \ / \ノー ■___一・ 適応過程で最小位相にならない場合、醸当する D D.コ / \ .′ l 0.ヰ 0.6 柏「m8月ヱed†叫膿「呵 0.8 1 零点を五平面上で単位円に対し相反な位置に折り 返す処理を一般的に行う。今、ヱ=Zo,(fヱ凸lく1), 以外の全ての零点が単位円の内側にあるシステム 別ヱ)を考える。Gl(z)がG(z)の最小位相部分を表 図4.線形位相との位相差 すものとすると、G(E)は(4)式に示すように最小 位相フィルタ(Gl(三)(1一如●乙 ̄1)の部分)と全域 進相および遅相の様子を囲4に示す。2次の全域 通過フィルタ(ヱ ̄1−Z。)/(トz¢一之 ̄1)の部分)の横 通過フィルタでは直読からサンプリング周波数ま となる。■は複素共役を示す。 でで位相特性が4打遅れるため、対応する線形位 相フィルタの係数良は5である。 G(王)=G.(z)(ヱ ̄1一缶) トヱ0●ヱ ̄1 1一助Iヱ ̄l 5.係数の更新法 エー】一ヱ0 =Gl(カ(1一三o甘1) 1−ヱ。−z一− (4) このように、折り返し処理は全域通過型フィル 5.1高速再帰最小二乗法の概略 高速再帰最小∴乗法7〉(商連RLS)による方 タを縦属接続することと等価であるため、この処 理により振幅特性は変わらないが、位相特性が変 程式誤差法の適応/キラメータの算出法を簡単に説 明する。適応パラメータ系列ベクトルh.,入力信 わることになる。この位相特性の変化により、適 応パラメータの更新値に誤修正が加丁わると考え、 号系列ベクトルu−を以下のようにする。ここで、 Tは転置を示す。 更に全域通過フィルタを用いることにより補償す る。 前述のように、(ト封E))を2次の縦属接続 h−=(al,a2,‥〕aH,bl,b之,・・,bN)† としたため、各セクションの係数の値が係数平面 ut=(削り削い=‥,Ⅹk≠dk−1,血り,‥,dk._Ⅳ)T の安定領域内にあるかで最小位相の判定を行うこ とができ、また、位相補償が必要な場合に用いる 推定系の出力dk’=u一丁htはであるため、誤差悟 全域通過フィルタの係数を実数にすることができ 号ekはek=dk−dk’となる。この誤差信号の電 る。義1の零点、極をもつ2次の全域通過フィル タの位相特性を、線形位相フィルタを基準にした 力Jkが最小になる条件を求めると(5)式の正規方 (3)(1−αLZ ̄l−βLヱ ̄宜)が最小位相か判定し、必要 程式が得られる。臥 申kおよぴβkは、それぞれ、 u.の自己相関行列、未知系の出力系列ベクトルと u.の相互相関ベクトルである。◎kが特異でない と仮定すると、htは以下のように求められる0 ならば、2.で述べた零点の折り返し処理を行 う。この時にあらかじめ零点の位置から決定 した位相補償を行う。 (4)串iセクション(i〈‖の係数を肇(i+1)セクショ h−=中k−1βk ンへコピーする。第Lセクションの係数は第1 (5) セクションへコピーする。(2)へ。 (5)式の申k ̄1とβkを再帰的に求め、更に、信号 のシフト特性を利用して演算畳の削減を囲った方 例外処理: 法が高速RLSである。RLSでは適応パラメー 両者同時発声および対向側からの発声が発 声した場合(送受信信号間の電力の差等によ り判定する)には、適応処理を中止し、囲5. タの更新処理の乗算回数は0(M苫+N量)である が、高速RLSでは0(M+N)と少ない白オー ダー吋には、最も簡易なLMSと同等であるが、 適応パラメータの収束性能が良い。文献7)ではラ (b)の構成をとり処理(エコー抑圧処理)を行 ティス型のディジタルフィルタについて述べてお ング間披数までの合計位相遅れに対応する遅 り、ここでは、2次の縦属型に適用可能なように 延である。 う。囲のZ ̄pは位相補償器の直流からサンプリ 修正して用いる。 5.2適応法 適応パラメータ係数更新には用い、図5.(a)の 構成でのみ適応動作を行う。以Fにその概要を示 す。 適応処理: (1)係数αl.βl(i=1・■L)の初期値をゼロとする。 (2)高速RLSにより(トαLZ ̄しβ,.Z ̄之)とA(E)の 係数を求める。この間L末路の・各2次のセク ションの係数は固定とする。 園5.(b)適応処理時以外の構成 5.まとめ 双方向通信系に適用することを考慮した位相補 償器縦属型のⅠIR型適応フィルタの構成および 適応法を示した。今後は、(1)適応過程で最′J\位相 特性の制約をかきず出力誤差型に変更する時に安 定化を図る方法との特性の違い、(2)観測雑音が存 在する時の動作について検討を行う予定である。 囲5.(a)適応処理時の構成 4 参考文献: 占)丑・椚dr8れS.D・Ste一刀8:A血ptive Si印alPro− 1)小林:直交関数系を用いたエコーキヤンセラ, CeSSing,154/161,Prenti亡e−Hall(19粥) 倍学諭日 Vol.J70一丑.1124/113ユ(1987) 6)軋L.Stonick:Ti皿e−†aryingPerfolanCe餌r− 2)尾関,梅田:アフィン部分空間への直交変換を用 いた適応フィルタ・アルゴリズムとその諸性質, faces for AdaptiveIIE Filters:GeoAetric 倍苧論A Vol.J67−A,1鋼/132(1984) Properties and IPplications for Filter Stability,IEEE Trans.on sp vol.43rl,29/42 3)矢.萩,斉藤:インパルス応答の分割推定に基づい た並列型カルマンフィルタによるエコーキヤン (1錮5) 7)S・Haykin:Adaptive FilterTheory.5B6/598, セラ,惜芋論A,Vol.J69−A,138/149(19郎) Pre】1tiee−Hall=錮1) 4)黒沢,井戸,辻井:ⅠIR形学習同定法に関する考 察,悟学論欄 Vol.J6自一丑】1229/1ヱ34(1985) − 5 −
© Copyright 2026 Paperzz