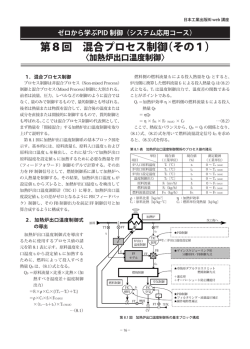
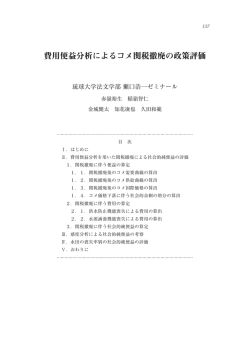
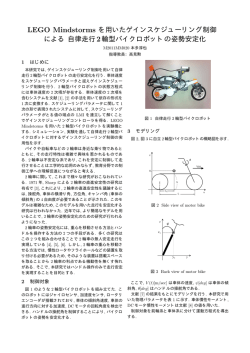
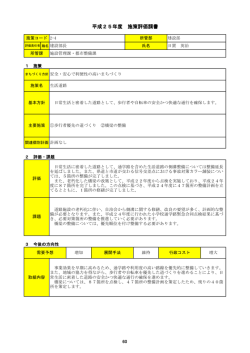
NDC 548.3 高専の制御工学教育における学習システム 一倒立振子を用いた制御実験の導入一 大西輝尚* 且 LoarNi蹟g Sysle璽 of CeRiroj 駐ggioeeri勲g i襲 a Tecb襲ical ColIege 一1塾torod颯{:tio盤 of a Co罰竜r{}l E翼peri自e凱t 腫sing i塾▼er{e{l PeEd颯1颯墨 一 Teruhisa Onishi be After graduation from the infomation department of the techn icai col lege, many peap le used to be engaged in contorl engineering design, Recently they are requested to handle not oniy conventional PID control method but al so state space method, Oonsiderin g above ment ioned si tuation,new learn ing s ysten of c ofitol efigiheeri fig ha ve been developed. The system i s consistently adopted a control problem of inverted pendultmt, through model ling of object, deci− N sioll of control parmeters,simu1ations,experiments, and evaluations. The system i s ¢onsidered to be suited to the course in the technical coHege whi ch aims to lltaster pract i一 . cal technoi ogy. システムを構成し,制御工学教育の向上を計ることにした 1. はじめに 。内容はブrf一=tドバック制御の入門書を教科書2}として用 本校の情報工学科では卒業後に制御技術に携わる者がか いた2単位(週100分)の講義と150分の実験の組み なりいる.そしてPID制御だけではなく状態空聞法など 合わせを考えて構成したもので,次の点を工夫した。 を使用している場合が多くなっている.そこで在学中にこ 1。制御対象は一変数及び多変数の線形制御系とし,これ れらの制御工学の基礎を,理論的な理解に留まらずに,体 らに関する項目を階層的に並べて理解を容易にした. 験的な学習を通じて身につけておくことが必要と思われる. 2.実験では,台車の位置ぎめ制御で一変数フィードバッ 制御工学の講義内容はともすれば,概念的かっ理論的とな ク制御系を学習した後に,倒立振子の安定化制御で多変 りやすいので教材としては,実用技術の習得という高専の 数制御系のフィードバックを扱って段階的に理解度が増 特色から,なるべく具体的で実際的な意味を持つものを使 すようにした。 うのが好ましい,幸い情報工学科の学生は計算機に大いに 3.台車の質量と摩擦係数,振子の慣性モーメントと摩擦 興味を示すのでこれを利用して制御工学に対する理解を深 係数を実験で同定させて,力学系の基本量の扱いに慣れ めることができる一e させるようにした. これらの理由から制御工学の教育に対して,具体的な学 4.一般的な制御系の設計手順に従って実験を行い,制御 習対象として倒立振子を用いた制御実験1,の利用を試みた. 系の設計法を体験させることができるようにした, この装置は一変数及び多変数の制御系を扱えること,不安 以下に現在本校情報工学科で採用している制御工学学習 定な系を制御して安定化できることを目に見える形で示す システムについて紹介する. ことができるなど,制御系の実験装置として優れていると 2.制御工学学習システム 思われる. そこで,この実験装置を一貫して用いて制御工学の学習 この制御工学学習システムは,市販の倒立振子機構とパ ac情報工学科 ソコンで構成する.ソブトウエアはMS−DOSのバッチ 平成6年8月31日受理 ;1マンドとバッチ処理ユティリティ(NORTON)を使 一27一 津山高専紀要第35号 (1994) つた階層構造による項目の分類を主とするバッチファイル である,使用者は装置に電源を入れて立ち上げたシステム 制御系のはたらき 1234567 のメニu、一に従って操作すればよい.最初に図1のような 制御目的. 主メニュー画面が現れる.これらの項目は細部が階層構造 制御対象のモデル化 になっており,最後の階層にくるとCRTの画面で説明が 特性解析とパラメータの決定 読めるようになっている.説明は原則としてワープロの文 書ファイル(ARUGA;デ・一ピソフト社)で示されるが, シミュレーション 制御性能の評三 参考書類3,での記載頁などを示す場合もある. 智門 前画面 主メニュー 番号を選んでください… 1. はじめに 図3 サブメニューの画面(b) 2, 目次 3. 制御とはなにか 4, 制御系のはたらき ここではr制御系のはたらき」という下位の階層の内容 5, 参考書類 について説明する.1∼5では外乱の存在のもとで安定な 6, おわりに システムを構成する場合の基礎事項を線形制御系の設計を 7, 終了 丹心に説明する,一変数及び多変数を扱う制御三共に微分 方程式を使い系を記述すること,その解は数値解法を用い 番号を選んでください… て統一的に解けることを念頭に置かせる.またラプラス変 換を使えばシステムの扱いが便利であることを示す.ラプ 図1 主メニューの画面 ラス変換については,基本的な例を用いて部分積分法など を使って変換の演習をした後は,もっぱら変換表を利用す 1を選択すると,このシステムの使用を始めるにあたって る立場をとる.このことにより,学生がラプラス変換に嫌 の注意などが読める,2ではこのシステムの階層構造を目 気を抱いたり,多大の苦労をすることから解放する.6で 次として示す.3を選択すると図2のサブメニュー画面 は実験が行えるようになっている. (a)になる. 7で前画面に戻り主メニa一で5と入力すると図4の画 面が現れる.ここではr参考書類」という下位の階層の内 容について説明する.参考書類を何冊かあげて予習,復習 制御とはなにか 等が効率よくできるようにする. 1, 定義 2. 歴史 参考書類 3..分類 4, 前画面 1. 教科書 2. 研究室の蔵書 3, 図書館の蔵書 番号を選んでください … 4. 文献検索 図2 サブメニューの画面(a) 5. 前画面 番号を選んでください… ここでは「制御とは何か」という下{立の階層の内容につ いて説明する.すなわち,制御という言葉の一般的な意味, 図4 サブメニューの画面(c) 制御工学での制御の定義,制御の歴史,制御の分類につい て説明する.4で前画面に戻って次の項目に進む. 主メ ニューで4と入力すると,図3のサブメニュー画面(b) このように使用者は階層構造のファイルシステムを操作し になり指示に従って学習する. て学習することができる. 一28一 高専の制御工学教育における学習システム 大西 子の角度はポテンショメータで測定する,1入力2出力の 3. 制御工学の学習法 制御系である.使用したパソコンはPC9801VMで, 制御工学というのは,学生に漫然と説明をしても理解し にくいことが多いので,制御目的をはっきりさせて,具体 例を持ちながら制御系のはたらきを学習するのがよいと思 われる. そこで具体例として台車の位置決め制御及び倒立振子の @惣ンf楓. り の設計は一一一 maに図5のような手順4}で行なわれるのでこの ぬ \ ’つ) 流れに従って学習する, \魅し1 安定化制御に関する実験を用いることにした.また制御系 〆振子 1’ 訴プニリ(へ 開始 制御目的 A/D アンプ D/A FC−9801 図6 倒立振子実験装置概略図 制御対象のモデル化 CPUは数値演算プロセッサを用いて8[MHz]で使用 特性解析と する.入出力については,マイクロサイエンス社のA/D, pラメータの決定 D/Aボードを使用した.どのような制御が行われている か知るために,入力波形をシンクロスコープを使用して測 評価 定する。実験用ソフトウエアはCART. EXEとPEN @ OK D。EXEなどCで記述したプログラムを使用する. CA DシステムはμDPAX(アドバンスト。コントロール. ラボラトリ社)5)とPRODECOS(日刊工業新聞社) シミュレーション 6)である.学生はこの装置を3∼4人で使用して実験する. 評価 @ OK 4。1 台車の位置決め制御 制御実施(実験) 4。1。1 制御自的 評価 OK ここでは台車の位置決め制御を目的とする。 終了 4,1。2 制御対象のモデル化 まず制御穀象がどんな法則にしたがって運動しているの 図5 制御系の設計手順 か調べる.制御対象はアンプ,モータ,台車,ポテンショ まず制御目的を明らかにして制御対象のモデル化を行う こと.次に特性解析を行ったのちにシステムパラメータの であればシミュレーションと制御動作の比較検討等を行う 恥:融 @\︸ぢノ〆 同定と設計パラメーータを決定すること,そして設計が妥当 メータで構成される図7のような入出力関係が考えられる. {、、 、 台車 ポテン 電圧 Vョメ @・」 [タ ことなどが主な学習項目である. 図7 制御対象のブロック図 4. 実験 倒立振子機構の概略図を図6に示す.実験装置はレール 台車はモ・一一タが発生するトルクをベルトの張力に変えて動 を走行する台車,台車に軸支された360[。]回転する振子, かすので図8のように表すことができる.すなわち,質量 台車を駆動するモータ,プーリ,ペルト系からなる.台車 Mの台車にモータによる張力u側が加わると台車が動き, はアンプを使用してDCモータで駆動し,台車の位置と振 速度に比例した粘性摩擦力Fv[N] (vは台車の速度)が 一29一 津山高専紀要第35号 (1994) 台車の動きをとめるように働くからニュートンの運動方程 ルク変換係数をkm,調整用のゲインをgとして,目標値 区 Rに対するフィードバック制御であるから図11となる. ただし,a、・F/M, b, ・1/Mとする. 張力ll もi 摩擦力Fv E U Rr+一一一一一i 十 X @ g km . 甲 n cl s2十als 図8・台車のモデル 式から,(1)式となる,この微分方程式(運動方程式モ 図11 位置ブィードバックのブロック線図 デル)によりモータの出力トルクによる入力uが加わった ときの台車の位置xの動きが決定される. このブロック線図を簡略化して,RとXの関係は(3)式 のように表される. (1) ︵3︶ d2x dx 画一+F一=u dt2 ’ dt bieigk. x= R s2 +ai s+bi km g 4.1,3 特性解析とパラメータの決定 歌に方程式で表わされた系の特性を調べる.この動きは ルンゲ・クッタ・ギル法などで(1)式の数値解を求めれ ばよい.しかし微分方程式をラプラス変換するとsの代数 方程式になるので扱いやすい.そこで(1)式を(2)式 に変換する, そこでgをO∼◇。としたときの特性根の軌跡は図12で● 印から→の方向に変化する.ここで特性方程式を基準形 (s2+2ζω.。S+ω。2・O)で表わしたときの根を(4) 式としたとき,二次遅れ系のインデシャル応答では,整定 時間が固有周波数ω、に逆比例するので,固有周波数Ul・nを Ms2X+FsX=U (2) s1,s2=旬n 〔一ζ圭jlレノー(1一ξ匿)} (4} ら Im (2)式を書き直して,台車の位置Xとte 一一タのトルクに \一ω。ζ 、.x”’ヤ…’…… よる入力Uとの関係を整理すると,つぎの図9のような伝 ’、 、 達関数で表わせる. 1.27 価r、 \、 1 i U @ ・1, X B。v「葬i _\3ア \ぞ 駈s2十Fg \\ 、. 」 _さ 一 図9 入出力の関係 一1.27 T:F/M,K=1/Mとして,y(t} :Kt−KT (1−e’t/T}はこの系の挙 撃?h. 動を示すが,このままでは台車は位置を増加する方向に走 0 9e 図、12 伝達関数の根軌跡 L﹂ り去ってしまうので図10のようなフィードバックを行う と,ステップ信号に対して右上図ような応答信号を得る. y t y(t) できるだけ大きくする.あるいは,減衰係数ζが0。6− 0.8の閥で行き過ぎ量と減衰比が小さくなるなどのこと から特性根の望ましい範囲を推定することができる. この実験では,特性根が×印となるようにしたときの値 から,系が安定となるgを推測できる.またこの比例制御 ー’ マ y 十 K 速度フィードバック補償を加えると図ユ3のようになる. ,,一ーム 一一〇 だけでは行過ぎ量が大きいので,これを少なくする目的で R rw 十 一. uamm−Le’.i blhm E 十 U ⊃一 o T x 一 82十als t f 図10 フィードバックの作屠 このブロック線図は位置/電圧変換係数をc1,電圧/ト s 図13 速度フィードバック補償 一30一 高専の制御工学教育における学習システム 大 西 この系の入出力の関係は(5)式となる.パラメー一.タを知 これを逆ラプラス変換して時間領域で表すと,(11)式 る必要があれば制御対象を分解して測定すれば良いが, となる. ︸ 一 b童01gk厩 5 x= R 一くtw t) e 1一.rn x(t)=K(1 一 sin[ulnV;(1−C2)t+e]) (11) ザ(1・ζ2) ザ(レζ2) s2+(ai+bi fk.)s+bi gkm ただし φ:taパ1 c 再度組み立てると付属品や組み立て精度によってパラメー タがずれる可能性もある.そこでステップ応答を利用して (11)式を使ってパラメータを変更した場合のシミュレ 等価質量Mと等価粘性摩捺係数Fを求めて,このシステム ーションを行う. のパラメータを同定する.伝達関数G{s}が(6)式の場 合のステッップ応答y(t)はyoを最終平衡値として, 4.1.5 実験 図15に台車の位置ぎめ制御における,シミュレーショ K阯罰2 G(S}: (6) s2 +2tan s+on2 ン値と測定値を示す.目標値,サンプリング自虐,フィー ドバックゲインを変えて実験を行うe立ち上がり時間や最 図14のようになる。最大行き過ぎ量Ap(A。・y,ノy。一1), 大行き過ぎ量などの動特性や,偏差などの静特性を測定す る. 行き過ぎ時聞Tp,減衰係数;t固有周波数Onの聞には(7) 脇 y (t) 妥一 瀬≡値 reference・0』4同 @stl爬・0.Odsl X[ .] シミュレー 位Yp ヨン値 @ 9・o.8 @ f・o.06 D. 04 置yo 目標値 g. oo OTp 時聞t 一D. D2 図14 台車のステップ応答 O. 1 2 3 4 5 時間t {s】 式の関係があるので目標値から出力までの伝達関数G㈲は 一(x CIV’(1一 42)) Ap :e Tp = rc/(w.ILIL(1−C2)) し (7} 図15 台車の位置ぎめ制御 4.2 倒立振子の安定化制御 f 4.2。1 制御臼的 (81)式となる.増幅利得K,時定数Tの対応を考慮すれば この制御系は次の二つの平衡点を持っている.一つは棒 (9)式から台車系の等価質量M,台車系の等価粘性摩擦 が垂れ下がった状態の安定平衡点,もう一つは棒が垂直に 係数Fが決定できる. 倒立した状態の不安定平衡恵である.制御目的は,棒が倒 立状態の不安定平衡点から少しはずれたとき,すなわち棒 8 ︸ G(s) : ー aigk. (1/F} s ((PIM) s十1} 十gk. (1/F) ー ︵ 謙撫/{21)} が倒れそうになったとき,すばやく原点にもどすように制 御系を設計することである, 9 4.2.2 制御対象のモデル化 図16を参考にシステムの運動方程式を立て,制御対象 、(倒立振子)のモデルを求める.台車,ベルト,プーリ, 4.1.4 シミュレーション モータ系の等価質量M【kg],台車の変位x[m】,モータ駆 応答はX(s)=G(s)U(s)であり入力がステップ状(U(s)=1/ 動用パワー・アンプの入力電圧v[V],カー電圧変換係数 s)の晦,二次遅れ系では,(10)式となる. a,台車,ベルト,プーリ,モータ系の等価粘性摩擦係 数F[kg/s],振子の重心回りの慣性モーメントJG tkg・m} ’, Ktun2 X(s)= G(s)U(s)= 振子の鉛直線からの角度e[rad],軸から振子の重心まで s(s2+2g tu.s+ o)n2) の距離1,軸の等価粘性摩擦係数C[kg・M2/s],振子の (10} 一31一 津山高専紀要第35号 (1994) 質量蛎,重力加速度g。,振子の並進速度VG(XCT,畑と すると振子の週動エネルギーは,(12)式となる. {JG÷M1正2}ひ十MIIx−Mユgl『÷C日:O l20} 団11el・(M÷M,}x十日頃=av (21} 1 . , 1 . :Mi (xG2十yG2) 十:JG, e2 (1 2) 2’”’V ’H’2 Xl=x, x2=e, x3=x, x4=θとすると,(22) 回転三助から(13)式,並進運動から(14)式をえる. 一(25)式を栂る. 1 , x、=x3 {22) ,f,::J.e2 (13) 2 x2=x4 {23} 1 . 一 . ’2= 氓Q92+2曲。・9t・’} {14) {JG十鮎1豆2}X4十憾11×3一猛1 gl翼2十CX4二〇 (24} コ また台車の運動エネルギは(15)式である. 恥1五4+〔M+Mi) x3 +Fx3=av {25} X1,X2,X3tX4について釈態方程式を求めると, L }3::Mx2 (15) 2 】【=A=十Bu {26} y 碧噸山薩位讐巳 (26)式となる.但し,A, Bは次式である. A= 撃〟F:,:, ::,;’ ::!,] B=[i:] 。 さらに,a=JG(M+M,)+MIMI2として, a32=一(臨1)2g。!α, 図16 倒立振子 このシステムの全運動エネルギーは(16)式となる. a33=一F(JG+Mi 12)/a, a34=CMi l/a, a42=(M+Mi)Milg.la, fu3=FMi l/a, fu4=一C(MtMi)/a, b3=a(JG+Mi 12)/a, b4=一 a惰1/αである. 1 . ” 1 , } :ii 十}2 十}3 :: (JG 十Mi 12) e2 十Mi xlecose十r (M十Mi} x2 U 6) 2” 一 ’ ” 2 一方,出力としては,位置xに比例した電圧y1〔V〕,角 度θに比例した電圧y2 (V〕が必要であるから,出力ベクト ルyは(27)式となる. さらに,ポテンシャルエネルギーは(17)式となる, Y= [ Yy i, ]: CI (2 7) tt:Mig.lcose (1 7} ただし,Cは下記の値である, システムの損失エネルギーは,(18)式となる. 1. 1伽 の=一CO2十一F渥2 (18) 2r’ ’2 ここでE,㍑,Dをラグランジェの運動方程式(19)に 代入し,一般化座標をql=θ, q2=x,入力をf1=O, f2=avとして線形近似すると,(20一一21)式とな る. c:[螂ll Cl;変位一電圧変換係数 c2婁角度一電圧変換係数 =(26)式,(27)式が制御対象の数学モデルである. ここで方程式の係数を求めるために,振乎の等価慣性モー メントJG,及び軸の等価粘性摩擦係数Cを求める必要が あるが,これらは棒を自由振動させて,その振動波形を測 定することにより求める■.ta子の白由三三の運動方程式は 乱(獅一下・諾・舞…{i・一・ (28)式となる, 一32一 高専の制御工学教育における学習システム 大 西 り平衡状態から外れた時,速やかにもとの状態に戻すこと (J+Mi 12) e=一C e 一Mi lg. sin e (28) θが小さいときには(29)式と考えてよい. である,xがすべて測定できれば系を安定とするフィーバッ クゲインkを極配置法,または最適レギュレータとして求 e+2C to. e+ tu .2=O {29) めて信号uをシステムに状態ブィードバックすればよい. また適当なkがも「とまれば,システムの方程式の解}よ(3 ここでUl・n;固有角周波数, T;固有周期,ζ;減衰率,δ; 対数減衰串とすると次の関係があるので(29)式を初期 条件θ{O} :θo,θ〔0)=0で解くと(30)式となる. 1)一(35)式のように求めることができる, i=Ax+Bu (31) y=C翼 〔32} 貼=kl (33) 2g ton=Cl(J+Mi 12), wn2=Mi lg./(J+Ki 12) i=(A+Bk)x(t) (34) ul,=2ru lT, C=6/v’“((2x)2+6), 6=}n(xi/x2) θ(t)=(e・ζωロ/生ズ(1弓ζ2))θosin(ザ(1曽ζ2)ωnt 1(t)=exp[(A+Bk)し]・1(0) (35) A+Bkの固有値がレギュレータの極であるから,極配置 法では,この極を複素左半面のより左側に設定すればより +tan” V’(1一 C 2)/P (3e) 速くx(t)=Oとなり,即応性のある望ましい応答なる.ま 図17の振動の周期Tと減衰率ζから振子の重心廻りの等 た最適レギュレs・一■タでは,(36)式の評価関数Jを最小 価慣性モーメントJa,軸の等価糟畳摩擦係数Cを計算す とする重み行列Q,Rを適当に決めたとき,(37)式の リカッチ方程式に代入して解Pが得られる.これを用いて る, 竃ω フィードバックゲインkは(38)式から得られる. 塵月度 J :. S (yTQy+uTRil)dt (36) o PA+ATP−PBR−iBTP+CrQC=e (37} k=一R−iBTP (38) 状態が測定出来ないときは図19の観測器を使う.つまり A U 0 (39),(40)式からxに代わるxを推測する. x. / t2 V’iig’, / z=Fz+Gy+Lu (39) A ’N,V! x=Hz+Jy (40) 図17 複振子の自由振動 振動波形は棒が垂れ下がった状態から,少し持上げて放し L y (t u G ジ F 十 ント)は図18のように,入力u,状me x,出力y,係数 J u 十 x y 『司一 Hs);〉. H 十 十 このようにして・求められた制御対象(システム又はプラ 瓢ω ^X 制御対象 4,2.3 特性解析とパラメータの決定 一Tレ 振動させて測定する. k c 十 A 図18 線形暗不変システムの制御対象 図19 観測器を利用したレギュレータ 4i 2,4 シミnレーション これらは試行錯誤な部分を有しているのでシミュレーショ 行列A,B, Cの線形時不変システムである.この場合の ンを繰り返して適当な値を求めることになる. 制御の目的は,振子が平衡状態であるとし,外乱などによ ここでk,F, G, L, H, Jはpe DPAX(制御系設計用C 一33一 津山高専紀要 第35号 (1994) AD)を使って求めるので,その手順(a∼e)について説 4)古田勝久ら,メカニカルシステム制御,(1988},オーム 明する. 社) 5)ACL社編集者,μDPAX解説書,{1986),アドバンスト.コ (a)DPACSコマンドでDPACSモードとする,さらにMATモr ントロールラボラトリ ドとする, 6}木村英紀,PC−9801制御系設計プログラミング,(1985), (b)MATコマンドで状態方程式の係数行列, A働4},B{4X 日刊工業新聞社 1),C{2×4}を入力する. (c)DPACSモードに戻し, SYSINコマンドでシステムデー タを作成する. (d)OPTコマンドで最適レ幸ユレータkを求める.その際 の評価関数Q,Rは試行錯誤で与える (e)OBSGコマンドで台車の速度と振子の角速度を求める ためにオブザーバF,G, L, H, Jを求める, 4.2.5 実験 図20に的立振子の安定化の結果を示す. 且 m 0 0. 一100 瞳 e 角度r ︵Nl U子の角度 肱 芬ヤの位置 2 4 6 8 10 5 位置㎞ 入 力 入力信号 一fi.4 一5 時間1 [e】 図20 倒立振子の安定化の結果 5.おわりに 講義は通年で2単位行い,それと平行して後期に実験を 行うが学生に内容を十牙理解させるためには時間が不足す る.そこで演習問題などを課して時間外に解かせるなどの 効平目が必要である, 階層構造で示ず項目の説明が十分目ないところがあるの で,改良してより理解し易くするつもりである. 留学生に対しては,語句の英語併記が必要であるので今 後追加する予定である. 参考文献 D大山恭弘ら,現代制御理論に基づいたディジタル制御系 の設計法;’インターブェイス,U986},pp.215・250, CQ出 版社 2}渡辺嘉二郎,制御工学,.・U992},サイエンスハウス 3}近藤文次ら,基礎制御工学,{1997},森北出版 一34一
© Copyright 2026 Paperzz