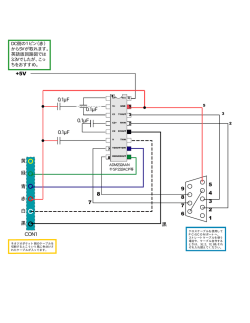
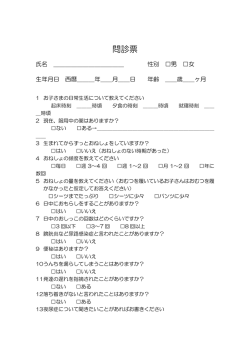
リアクションホイールの プロトモデルの研究開発 指導教員 佐鳥 新 助教授 発表者 6-4-L-97-004 浅野 6-4-L-97-005 八田 6-4-M-96-79 平野 哲理 忠善 貴弘 本発表の構成 ・リアクションホイールの開発の目的 ・リアクションホイールのシステム設計 ・地下無重力センターでの機能実証試験 ・まとめ 近年の衛星開発の動向 大型衛星を単純に縮小する のではなく、小さくとも高度な 運用に堪え得る必要最小限 の機能を厳選して搭載する。 の機能を厳選して搭載する 開発期間の短縮化 (数年→半年〜1年) 民生部品の宇宙転用化 をすることにより、 開発費の大幅削減 (数億→5000万以下) リアクションホイールの開発の目的 宇宙空間は無道で支持点がない 外乱トルクにより回転運動が発生 その外乱トルクに対して姿勢制御する必要 リアクションホイールを開発 マイクロサットについて この衛星に搭載する ことを前提としたリアク ションホイールの研究 を行った。 マイクロサットBBM (地上実験モデル) リアクションホイールのシステム ロータ モータ ジャイロセンサ フォトリフレクター 回転数 モータドライバ IC 角速度 H8 制御信号 (PWM) リアクションホイールの回路構成 モータ L リフレクタ 出力端 子 R 0.1μ F Vcc ジャイロセンサ 出力端 1k Ω 0.1μ F TCLK‑D OUT2 Vcc Vcc OUT1 Rin モータ ドライバFin GND H8 TIOC‑A2 GND GND Vcc GND P7‑0 子 15p F 16MH 発振 z 器 TIOC‑AO 15p F RNF GND VM VCC VREF TX RX Vcc GND 100μ F 0.1μ F 12V TX RX 5V GND GND Dsub15ピンコネクタ リアクションホイールのPM設計 リアクションホイールのPMの外観及び仕様は 以下のとおりとなった。 PMリアクションホイールの仕様 図 PMリアクションホイールの外観 構体 96[g] モータ 30[g] 回路・センサ 20[g] ロータ 54[g] 本体重量合計 200[g ] 消費電力 Max 2[W] 最大発生トルク 30[g 30[g・cm] 最大蓄積角運動量 1.5E - 2[Nms ] 無重力実験施設で行う目的 重力下では様々な外乱により動作に制限 宇宙空間は無重力である 宇宙空間と同様の状態を再現したほうが良い 無重力実験施設で実験を執り行った HITサットのスペック ・CPU: H8(HD64F3048F16) ・ReactionWheel: オリジナル ・GyroSensor: ENC-03J(村田製作 HITサット 所) 寸法: 130×130×130[mm] ・WirelessMODEM: 重量:約1.5[kg] YSM321(八重洲無線) 電力:約4[W] HITサット モジュール構造 無重力実験施設(JAMIC)概要 ・微少重力レベル :10g –5 ・微少重力時間 :10秒 ・制動時最大減速加速度 :8G ・データ伝送方法 リアルタイムカラー 画像伝送2ch 双方向通信伝送システム (10Mbps) JAMIC落下カプセル HITサットの信頼性を高める目的 無重力実験を行なうにあたり、機器の 破損が相次いだ。 そこで、信頼性の向上が求められた。 試行回数を増やすことに よって不具合が起こる可 能性がある機器を特定 、 MTBFによる信頼度の数 値化。 誤った現場判断を防 ぐために、作業行程 をマニュアル化。 フローチャートの作成 H8周りの 異常対処 0V RW回転音が 聞こえる はい 両方点灯? いいえ いいえ H8Box 側面はずし 電圧確認 H8Box 側面はずし MD電圧確認 いいえ リフレクタを遮て 電源再投入 LED片方点灯 0v リフレクタ を光にさらす 電池Box9V交換 いいえ いいえ H8Box予備 準備OK? 動作確認OK? いいえ 30分延長依頼 H8Box整備 両方点灯 AND RW回転音? はい H8Box交換 はい いいえ はい 12V 5V 電池Box9V交換 動作確認OK? はい 予備の 動作確認 OK はい 整備・ 動作確認 できたか? 続行 いいえ 実験中止か 先生に判断を 仰ぐ はい はい 衛星組付けに戻る 中止 実験中止 いいえ MTBFによる評価 信頼性を推し知る指標としてMTBF ( Mean Time Between Failures )がある。 稼働時間 MTBF= 故障時間 であることから、HITサットが長時間連 続使用しないことを考慮し、 稼動回数 MTBF≒ 故障回数 とみなして算出。目標MTBFは9(回) 各モジュールが独立して機能することを確か めた上、モジュールを組み立てる作業を繰り 返し、MTBFを算出。 試行回数16回にて4回の故障。 12 MTBF≒ =3 4 目標のMTBFに満たない。しかし、4回とも電源系 の故障であったことから、HITサット2号機におけ る不具合の発生個所は電源部にあると特定 。 電源部改善後におけるMTBF 電源系の集中デバッグ 試行回数 故障回数 1月16日 30回 2回 1月17日 20回 2回 1月18日 20回 0回 66 = 16.5 MTBF≒ 4 目標値9(回)をはるかに上回る数字。 無重力実験の実験概要 ・無重力下で実際に姿勢制御できる か(上砂川無重力実験施設: JAMIC) ON/OFF制御 HITサット t=0(s):落下開始 t=1(s):放出機構開放、正方向電圧 ⇒ホイール回転開始 t=3(s):制御開始 ⇒停止制御 (正電圧、逆電圧を繰り返し姿勢を 安定させる) t =10(s):落下終了 HTIサット 射出機構 HITサットの角速度 JAMIC 01/19 電圧[V] 1.7 角速度・角加速度 3 2 1.65 1 0 1.6 -1 1.55 角速度[rad/s] -2 -3 1.5 -4 1.45 1.4 3.30 ジャイロセンサ の電圧変動[V] -5 -6 4.28 5.27 6.25 7.23 8.22 落下開始からの時間[sec] 9.20 角加速度 [rad/s^2] リアクションホイール動作の様子 RW回転数収束の様子(絶対値) 回転数(絶対値) [RPS] 120 100 80 60 40 20 0 3.30 4.40 5.50 6.60 時間[sec] 7.70 8.80 9.90 無重力環境機能実証試験結論 リアクションホイールの動作により、 2.3591rad/sから0.1582rad/sまで減速できた。 リアクションホイールが無重力環境における 姿勢制御手段として有効であることが実証 できた。 まとめ リアクションホイールの無重力環境での 機能実証を行い、PM設計の指針を得た。 今後の課題 •リアクションホイールの3軸機能実証試験 •リアクションホイールの実機製作 •マイクロサットのPM設計
© Copyright 2026 Paperzz