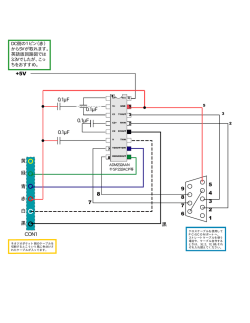
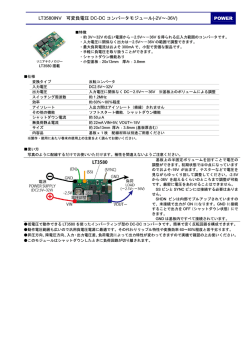
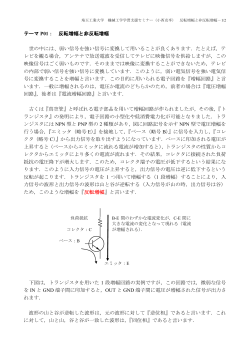
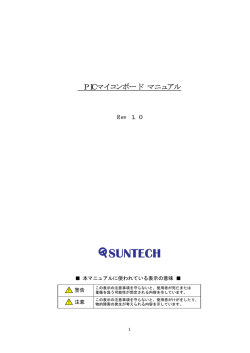
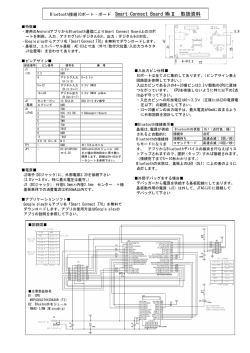
ジャイロセンサ 安全上のご注意(ナビゲーション用MEMSジャイロセンサ/EWTS86N□/EWTS86K□) 1. はんだ付け 1) はんだペースト厚み(推奨) 2) フラックス 3) 予 備 加 熱 4) リフローはんだ付け 5) 雰囲気温度 6) 冷 却 7) リフローはんだ付け回数 8) 手はんだ (推奨条件) : 0.15 mm〜0.20 mm : 非腐食性のロジン系にて,その溶剤は化学作用の少ないアルコール系を使用してください。 : 基板表面温度180 ℃以下,120秒以内で管理してください。 : 基板表面のピーク温度は,260 ℃以下で管理してください。 : 雰囲気温度は,300 ℃以下で管理してください。 : はんだ付け熱によりセンサを劣化させないよう,直ちに送風して冷却してください。 : 1回までを限度としてください。 : 1 はんだごて…350 ℃以下,20 W以下の条件ではんだ付け作業を行ってください。 2 はんだ時間…3秒以内 2. 洗浄 洗浄は行わないでください。 3. ハンドリング 1) センサの性能に影響を与える恐れがありますので,落としたり強い衝撃を与えないでください。 2) 本センサは,下記の環境及び条件で保管されますと,性能やはんだ付け性等に影響を与える恐れがありますので, 下記条件での保管はしないでください。 1 湿度85 %RH以上の環境 2 腐食性ガスの雰囲気中(CI 2, H 2S, NH 3, NO X, SO 2等) 3 製品納入後,3ヶ月以上にわたる長期保管 また,荷重応力を加えないよう梱包状態のまま保管してください。 4. 回路基板パターンニング 以下に推奨パターンニングを示します。(mm) 部品面 11.2 6.35 3-1.6 ⑧ 6-4.2 7.6 6-0.4 1.45 2.05 3-2.6 ⑦ ①② 0.60± 0.05 1.27± 0.05 ③ ⑨ ④ ⑤ 8.89 (=1.27 7) ⑥ ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ Vout GND GND NC NC Vcc GND GND GND ※回路構成上の注意事項 1) Vcc 端子,Sig 端子の近くにチップコンデンサ (0.01 µF 〜 0.1 µF) を GND 間に配置してください。 2) Vccのバックアップコンデンサとして,47 µF〜 100 µF 程度 の電解コンデンサを配置してください。 5. 部品配置に関する注意 本センサは,周囲温度に対する0点ドリフトを若干持っております。以下の点に注意して部品を配置願います。 1) 熱の発生する部品の近くにセンサを配置しないで ください。 センサ 2) 熱の対流に影響するような位置にセンサを配置しないで ください。 センサ パワートランジスタ 等の発熱部品 パワートランジスタ 等の発熱部品 3) 同一基板上に2個以上本センサを実装しないことを推奨します。 センサ内部の音伹振動が実装基板を介してお互いに干渉し,周期的な0点変動を発生する場合があります。 6. 外部振動に対する注意 振動により,センサの実装されるプリント基板が共振しないように,次の事項に注意願います。 1) プリント基板は剛性の高いガラスエポキシ系を推奨します。また、センサはプリント基板取付近傍 に配置願います。 2) 外部振動により,センサに直接他の部品が接触する可能性のないように部品配置を考慮願います。 3) プリント基板を固定するねじなどの緩みに注意願います。 ユニットにセンサが取付けられた状態で,振動試験,特性を十分確認願います。 設計・仕様について予告なく変更する場合があります。 ご購入及びご使用前に当社の技術仕様書などをお求め願い,それらに基づいて購入及び使用していただきますようお願いします。 なお,本製品の安全性について疑義が生じたときは,速やかに当社へご通知をいただき,必ず技術検討をしてください。 ジャイロセンサ 7. 推奨回路 IGN Reg. 5V (5 V) (Note 5-7-1) C3 Vcc C1 角速度 センサ BATT 12 V Vcc VRef A/D OUT NC (Note 5-7-2) GND RL C2 1) C1,C2 : EMS対策用コンデンサです。高周波特性のよい10000 pF前後のチップコンデンサを2〜3個並列にセンサ 端子のできる限り近くに配置することを推奨します。 2) RL : 出力負荷抵抗です。100 kΩをご使用ください。(推奨) 3) C3 : 電源バックアップコンデンサです。センサ内部には電源バックアップコンデンサを内蔵しておりません の で,本体の電源回路と離れている場合,もしくはコネクタを介する場合は電源バックアップ用 コンデンサ(C2)を必ず入れてください。(A/Dコンバータ,マイコン等の電源と共有し,でにバックアップ コンデンサがある場合は不要です。) 4) センサの出力信号をA/Dコンバータで処理する場合,電源(5 V)は共有してご使用ください。 5) センサのNC端子は,お客様の基板上ではどこにも接続しないでください。 8. 本センサのご使用にあたって順守いただく事項 1) 本センサは、カーナビゲーションシステム用途に設計されたものです。 2) 本センサご使用に際しては,貴社製品に本センサを組み込んだ状態で,必ずご確認,ご評価を実施願います。 3) 貴社製品の特性又は使用環境によっては,本センサの0点電圧又は感度が本納入仕様書を満足しない場合や不安定な 状態になる場合がありますので,そのような影響を十分に考慮した上で貴社製品を設計して頂きますようお願いします。 4) 本センサをカーナビゲーション用途以外の目的に使用される場合は,本センサの欠陥の有無に関わらず,弊社としまし ては,本センサ使用による経済的損失,身体的損傷あるいは財産損害等いかなる損失・損害の責任も負いかねます。 従いまして,そのような損失・損害を回避するために「フェールセーフ」設計を確実に実施して頂けますようお願いします。 安全上のご注意 (ロールオーバ検出用MEMSジャイロセンサ/EWTS64G□) 1. はんだ付け 1) はんだペースト厚み(推奨) 2) フラックス 3) 予 備 加 熱 4) リフローはんだ付け 5) 雰囲気温度 6) 冷 却 7) リフローはんだ付け回数 8) 手はんだ (推奨条件) : 0.15 mm〜0.20 mm : 非腐食性のロジン系にて,その溶剤は化学作用の少ないアルコール系を使用してください。 : 基板表面温度180 ℃以下,120秒以内で管理してください。 : 基板表面のピーク温度は,260 ℃以下で管理してください。 : 雰囲気温度は,300 ℃以下で管理してください。 : はんだ付け熱によりセンサを劣化させないよう,直ちに送風して冷却してください。 : 1回までを限度としてください。 : 1 はんだごて…350 ℃以下,20 W以下の条件ではんだ付け作業を行ってください。 2 はんだ時間…3秒以内 2. 洗浄 洗浄は行わないでください。 3. ハンドリング 1) センサの性能に影響を与える恐れがありますので,落としたり強い衝撃を与えないでください。 2) 本センサは,下記の環境及び条件で保管されますと,性能やはんだ付け性等に影響を与える恐れがありますので, 下記条件での保管はしないでください。 1 湿度85 %RH以上の環境 2 腐食性ガスの雰囲気中(CI 2, H 2S, NH 3, NO X, SO 2等) 3 製品納入後,3ヶ月以上にわたる長期保管 また,荷重応力を加えないよう梱包状態のまま保管してください。 設計・仕様について予告なく変更する場合があります。 ご購入及びご使用前に当社の技術仕様書などをお求め願い,それらに基づいて購入及び使用していただきますようお願いします。 なお,本製品の安全性について疑義が生じたときは,速やかに当社へご通知をいただき,必ず技術検討をしてください。 ジャイロセンサ 4. 回路基板パターンニング 以下に推奨パターンニングを示します。(mm) ④ ⑥ ⑦ 2 ⑧ ⑨ ⑩ 2-1.27 7.03 ⑪ 4-1.7 4-1.5 2 ⑫ 4-7.5 6.9 2 ⑤ 2-1.905 2-1. 27 8-0.7 ③ ② ① 4-1.7 2-3.175 2-1. 27 2 Vcc ① ② DIAG NC ③ ④ GND ⑤ CHECK ⑥ GND ⑦ GND ⑧ GND NC ⑨ NC ⑩ SIG ⑪ ⑫ GND 5. 部品の配置に関する注意 当センサは,周囲温度に対する0点ドリフトを若干持っております。以下の点に注意して部品を配置願います。 1) 熱の発生する部品の近くにセンサを配置しないこと。 2) 熱の対流に影響するような位置にセンサを配置しないこと。 6. コーティング剤の塗布方法 コーティング剤についてはスプレー方式にて塗布してください。(推奨) コーティング剤のDipコーティングは不可。 7. 外部振動に対する注意 ユニット外部からの振動により,センサが実装されるプリント基板に共振点がある場合,次の事項に注意願います。 1) プリント基板は剛性の高いガラスエポキシ系を推奨します。またセンサはプリント基板取付ねじ近傍に配置願います。 (音伹部には,500〜900 Hzの間に共振点(離調周波数)が存在しますので,実機での振動評価をお願いします。) 2) 外部振動により,センサに直接他の部品が接触する可能性の無いように部品配置を考慮願います。 3) プリント基板を固定するねじなどの緩みに注意願います。 * ユニットにセンサが取り付けられた状態で,振動試験を十分確認願います。 8. 推奨回路 GND Vcc=5 V 10 K VCC RD Signal 5V ① ⑫ ⑪ DIAG ② ⑩ NC ③ ⑨ GND ④ ⑧ CHECK ⑤ ⑥ ⑦ SIG NC RL 100 KΩ NC GND GND GND 1) 負荷抵抗は100 kΩをご使用ください。 2) 本センサ内部には電源バックアップコンデンサを内蔵しておりませんので本体の電源回路と離れている場合,もしくは コネクタを介する場合は,電源ラインにバックアップ用コンデンサを使用してください。電源が瞬断した場合,音伹振 動が停止し,再起動までに0.5秒かかります。 3) 逆電圧又は6.3 V以上の過電圧が加わるとセンサが故障するおそれがあります。 4) センサ出力信号をA/Dコンバータで処理する場合,電源(+5 V)は共有してご使用ください。 5) シールドケースの電位は電源GNDか,ケースGNDかによってEMC特性が変わります。セット側で確認してご決定 ください。 9. 本センサのご使用にあたって順守いただく事項 1) 本センサの品質には万全を期しておりますが,寿命等故障モードとして,0点電圧及び感度の規格外れあるいは不安定 等が発生する恐れがあります。したがって,セット設計に際しましては,本センサの単一故障に対し,セットとして の影響を事前にご検討ください。 輸送機器(列車,自動車,船舶等),信号機器,医療用機器,航空,宇宙機器,電熱用品,燃焼及びガス機器,回転 機器,防災防犯機器,原子力関連機器,工作機器等において当製品の不具合で,人命その他の重大な損害の発生が 予測される場合は,下記のご検討等でフェールセーフ設計の配慮を十分行い,安全性の確保をお願いします。 1 保護回路・保護装置を設けてシステムとしての安全を図る。 2 冗長回路等を設けて単一故障では不安全にならないようにシステムとして安全を図る。 2) 本センサの安全性について疑義が生じたときは,速やかに当社へご通知いただき,必ず技術検討をしてください。 設計・仕様について予告なく変更する場合があります。 ご購入及びご使用前に当社の技術仕様書などをお求め願い,それらに基づいて購入及び使用していただきますようお願いします。 なお,本製品の安全性について疑義が生じたときは,速やかに当社へご通知をいただき,必ず技術検討をしてください。 ジャイロセンサ ジャイロセンサの原理 ジャイロセンサとは,物体の回転角速度 (°/ s)を検出するためのセンサです。 検出素子は,電極が直接形成されたバイモルフ型水晶音伹及びMEMSシリコン音伹です。 回路部は,①駆動回路と②検出回路により構成されています。 ① 駆動回路 下記発振ループにより,音伹固有振動数で発振させます。感度安定化の為に,音伹振動速度を常に一定に保つ必要があ るため,AGCによって振幅制御しています。 ドライブ電極に電圧印加 音伹振動発生 モニタ電極に電荷発生 AGCにより振幅一定制御 ② 検出回路 角速度が与えられると,音伹のアームがコリオリ力により歪曲し,図の様な波形が発生します。この信号は,駆動周波 数 fd を搬送波とし,角速度信号 f で AM 変調された状態と等価であることから,駆動信号 fr を基準信号として同期検 波することにより,角速度信号を抽出します。 〔信号処理〕 f (角速度) センス 出力 Ⓐ 角速度 fd コリオリカ Ⓑ 基準 fr 振動方向 バイモルフ型 水晶音伹 A × B 同期検波すると 同期検 波出力 Ⓒ センス ドライブ Ⓓ 出力 モニタ LPF出力 〔出力特性〕 Im fd モニタ アンプ AGC センサ出力 駆動 アンプ (V) 4.5 fr Ⓑ 増幅器 Ⓐ 同期 検波 ローパス フィルタ Ⓒ アンプ V0出力 Ⓓ 2.5 0.5 -80 0 +80 (°/ s) 角度 (最大最低出力及び最大検出角速度についてはアプリ ケーションにより異なります。) 設計・仕様について予告なく変更する場合があります。 ご購入及びご使用前に当社の技術仕様書などをお求め願い,それらに基づいて購入及び使用していただきますようお願いします。 なお,本製品の安全性について疑義が生じたときは,速やかに当社へご通知をいただき,必ず技術検討をしてください。 ジャイロセンサ 応用例(自動車4WS 制御) トランス ミッション 前 輪 舵 角 車 速 後 輪 舵 角 角 速 度 4WS コントロールユニット 舵角制御 自動車用など,供給電源ラインにサージ電圧が生じる用途では,コントローラ側にサージ保護回路を内蔵することをお 推めします。 使用温度範囲が広く,0点電圧ドリフトが無視できない場合は,デジタルフィルタ(LPF)によるドリフト補正処理を行 うことをお推めします。 用語説明 コリオリ力 回転座標素(角速度 )において,質量 m の物体が速度vで運動するとき,移動方向の直角方向に働く見かけの力で コリオリ力 Fc=2・m・v・ で表わされる 0点電圧 角速度0(静止状態)での出力 DC 電圧 応答性 入力角速度信号に対する角速度センサ出力信号の時間遅れ 品番構成 1 2 3 4 E W T S 品目記号 5 6 タイプ 表示記号 5桁目 タイプ 8 カーナビゲーション用等 6 ロールオーバ検出用 7 8 カスタムコード 9 10 11 12 補助 設計・仕様について予告なく変更する場合があります。 ご購入及びご使用前に当社の技術仕様書などをお求め願い,それらに基づいて購入及び使用していただきますようお願いします。 なお,本製品の安全性について疑義が生じたときは,速やかに当社へご通知をいただき,必ず技術検討をしてください。
© Copyright 2026 Paperzz