Paper
zz
Explore Categories
Log in
Create new account
No category
PHSによる高品質マルチメディア通信の研究
Download
Report
「泌尿器科学」 「産科婦人科」
福山市民病院医療安全管理指針
Press Release
DS-CDMA 通信システムにおける ZF-FDE の雑音強調を抑圧する
アフリカ水田における木製柵渠の導入にあたっての耐久性評価の試み(2)
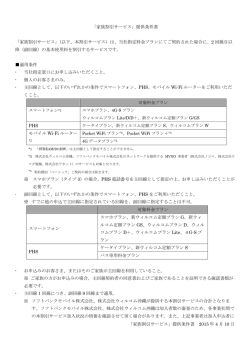
「家族割引サービス」提供条件書 - Y!mobile(ワイモバイル)
すぐに「つながる」安心。 PHSの利用で呼出し時間の短縮と ランニング
アルミニウム合金のろう付について教えてください?
© Copyright 2026 Paperzz
About Paperzz
DMCA / GDPR
Report