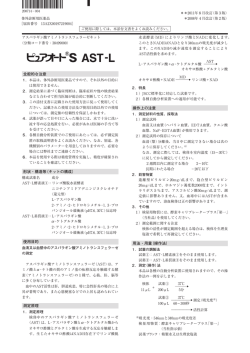
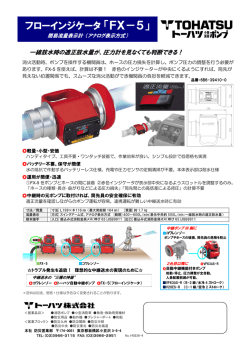
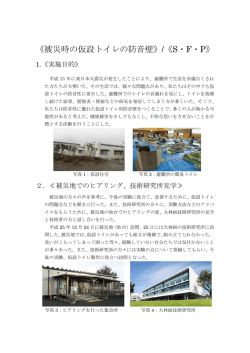
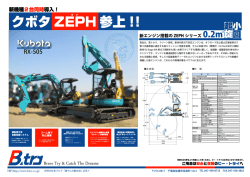
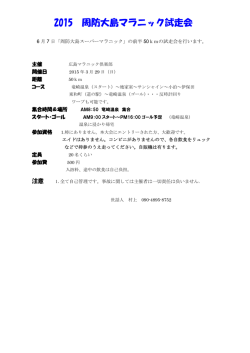
スーパーFAシリーズ コンパクトで軽量なアクチュエータ アブソリュート方式が選定可能 高加減速(2G)動作が可能 TOKYO. JAPAN AST CATALOG No.341-2 AST 案内部にボールリテーナ入りLMガイドSRS形、駆動部に小径の転造ボールねじを使用した、軽量かつコンパクトなアク チュエータAST形登場! AST形の構造 スライダ 転造ボールねじ ∅8 ボールリテーナ入りLMガイドSRS形 アウタロータモータ AST 形の構造 AST形の特長 アブソリュート方式が選定可能 アブソリュート、インクリメンタル両方式対応のACサーボモータを搭載しています。 LXAコントローラと組合わせることにより、アブソリュート方式を標準選定できます。 アブソリュート方式…電源OFF時もスライダの座標を記憶しているため、電源再投入時の原点復帰が不要です。 高加減速(2G※1)動作が可能 従来のスーパーFAシリーズ KT形で既に実証済みのアウタロータモータ方式※2を採用しており、高加減速、短い整定 時間等により高タクトを実現します。 ※1 最大能力を表しています。常用では0.3Gを目安とする最大値としてください。 0.3Gを超える場合は条件を詳細に設定する必要がありますので、詳しくはTHKまでご相談ください。 ※2 一般的なモータは、外枠を固定し内側が回転しますが、アウタロータモータは反対に外側が回転します。 優れたメンテナンス性 モータとアクチュエータ本体を高剛性カップリングで接続した構造であるため、装置にアクチュエータを取付けた状態 で故障したモータ等の交換が可能となり、メンテナンス性に優れています。 1 2種類のカバーリングタイプ アクチュエータ内部への異物(小部品等)侵入を防止するカバーリングを2種類(ステンレスシートタイプ、スリットカ バータイプ)標準で選択できます。 ステンレスシートタイプ ・内部へ通じる隙間を無くした密閉タイプ スリットカバータイプ ・スライダが通過するスリットを上面からカバーで 覆い隙間を最小限にしたタイプ ・上面からの異物侵入を防止 高性能・高機能コントローラ 32bit RISC CPUとインテリジェントサーボドライバを搭載し、高速・高精 度制御を実現します。また、下記の高度な機能を搭載しています。 ●マルチタスク制御 同時に8プログラムの並列制御が可能。 ●リアルタイムオートチューニング 搭載荷重の変化に対応し、自動的にサーボゲインを調整します。 ●ステータスモニター機能 アクチュエータの位置、I/Oの状態、変数、フラグ、モータの状態をモニター することが可能です。 軽量、簡単操作のオペレーティングボックス(OP-2) 従来のOP-1の機能をさらにアップ ●プログラムの作成・編集 ●ポイントデータの作成・編集 ●プログラムの実行 ●ジョグ機能(ダイレクト動作) ●パラメータ編集 ●モニター(I/Oポート、フラグ、変数、動作状態等)が可能 ※ OP-2と同機能のパソコン対応ソフト(LXA-PC)もご用意しています。 2 AST システム構成 ∼選べる3タイプ∼ アクチュエータ AST形 PLC(シーケンサ) LXAコントローラ OP-2 1. ポイントタイプ ●シーケンサからポイントを指定するだけの簡単操作 ●専用ロボット言語、ロボットプログラム不要 ●多点位置決め、ピッチ送り等の動作に最適 ●位置決めポイントは最大500点まで登録可能 ポイントタイプ:LXA-SM ポイントNo.(BCD1) 〃 (BCD2) ①ポイントの指定 〃 (BCD4) … ②スタートSW入力 ③ポイントへ移動 ④ 位置決め完了出力 スタートSW 位置決め完了 2. プログラムタイプ HOMSQ 原点復帰 SPEED 速度設定 MOVEP ポイント1へ移動 DOSET 出力完了 … 3 プログラムタイプ:LXA-SA/SP … ●シーケンサ無し(スタンドアローン)でも動作可能 (シーケンサを使う場合でもシーケンサ側の負担を大幅軽減) ●マルチタスク高速処理(同時8プログラム動作) ●マルチスプライン機能により移動途中で出力及び速度変更が可能 ●プログラムにより周辺機器(センサ、電磁弁、ランプ等)の制御も自由自在 3. パルス列タイプ ●シーケンサやパソコンからパルス列で直接制御 ●専用ロボット言語、ロボットプログラム不要 ●制御は市販のサーボモータ、ステッピングモータと同じ ●画像処理等、位置補正動作に最適 PLC(シーケンサ) + 位置決めユニット アクチュエータ AST形 DM-Bドライバ※ PC + 位置決めボード LXAコントローラに内蔵しているリアルタイムオートチューニング 機能搭載の高性能サーボドライバです。 パルス列入力のため、高性能・高信頼のアクチュエータをステッピ ングモータ感覚で簡単に制御できます。 電子ギア アクチュエータ機種 指令パルス 帰還パルス 分子 分母 モータ 1 回転 当たりの分解能 [p/r] アクチュエータ 分解能 [μm] モータ 1 回転 当たりの分解能[p/r] アクチュエータ 分解能[μm] AST-I- ** -6 80 3 1200 5 32000 0.1875 AST-I- ** -12 80 6 2400 5 32000 0.375 注)位置決めコントローラからのパルス分解能は、上の表の指令パルスをもとに計算して出力してください。 ※ DM-B 形ドライバの詳しい仕様については、ドライバメーカの取扱説明書をご参照ください。 4 AST 呼び形番の構成 アクチュエータ形番 AST - A - 5 B - 12 - 35 L W - L - R ① ② ③ ④ ⑤ ⑥ ⑦ ⑧ ⑨ ⑩ アクチュエータ部 ① 呼び形番 AST ② エンコーダ A :アブソリュート I :インクリメンタル ③ モータ容量 3 :30W 5 :50W ④ ブレーキ 無記号:ブレーキ無し ( 標準 ) B :ブレーキ付き ⑤ ボールねじリード 6: 6mm 12:12mm ※1 5: 50mm ∼ ⑥ ストローク (50mm 単位でお選びください ) 60:600mm 10:100mm ∼ フレーム長さ ※ 2 (P.13 ∼ 14 参照) (50mm 単位でお選びください ) 60:600mm ⑦ カバーリング T :ステンレスシートタイプ L :スリットカバータイプ C :クリーン仕様 ⑧ スライダ形状 無記号:スライダ 1 個付き W :スライダ 2 個付き ( スリットカバータイプのみ ) ⑨ モータ・ケーブル 取出し方向 (P.6 上図参照) 無記号:右方向 ( 標準 ) L :左方向 U :上方向 D :下方向 ⑩ オプション (P.6 中図参照) R :原点逆 ( 反モータ側原点 ) SS:外付けセンサ原点 ( モータ下に見て右側・モータ側原点 ) RS:外付けセンサ原点逆 ( モータ下に見て右側・反モータ側原点 ) ※ 1 スリットカバータイプ スライダ 2 個付き以外の場合は、ストロークで形番を構成してください。 ※ 2 スリットカバータイプ スライダ 2 個付きの場合は、フレーム長さで形番を構成してください (P.13 ∼ 14 参照 )。 セット形番(AST+単軸コントローラ/ドライバ) AST - A - 5 B - 12 - 35 L W - L - R + M - 1 D ① ∼ ⑩ アクチュエータ部 ∼ ① アクチュエータ部 形番 上記参照 ⑩ コントローラ / ドライバ部 ⑪ 指令方式 M :ポイントタイプ A :プログラムタイプ P :マルチスプライン機能付きプログラムタイプ B :パルス列タイプ (DM-B ドライバ ) ⑫ 電源電圧 1 :単相 AC 100 ∼ 120V 2 :単相 AC 200 ∼ 230V ⑬ ネットワーク仕様 無記号:無し D :デバイスネット仕様 ※ セット形番は単軸のみとなります。 5 ⑪ ⑫ ⑬ ⑨ モータ・ケーブル取出し方向(- L / U / D) 無記号:右方向 (※標準) -L: 左方向 -D: 下方向 -U: 上方向 4.3 5.8 ⑩ 外付センサ(-SS/RS) 2.4 33 2 30 7.4 2 28.3 35.7 コントローラ形番 LXA - 4 P - 05 B - 05 B - 03 B - 03 B - 2 - A- A A ① ② ③ ④ ⑤ X軸(単軸) ④ ⑤ Y軸 ④ ⑤ Z軸 ④ ⑤ ⑥ ⑦ ⑧ ⑩ ⑪ S軸 ① 呼び形番 LXA ② 軸仕様 S 1 2 3 4 ③ ソフトウェア仕様 無記号:多軸オプション無し P :多軸 マルチスプライン機能追加 ( 単軸 プログラムタイプ&マルチスプライン ) M :単軸 ポイントタイプ A :単軸 プログラムタイプ ④ モータ容量 03:30W 05:50W ⑤ ブレーキ仕様 無記号:ブレーキ無し B :ブレーキ付き ⑥ 電源電圧 1 :単相 AC 100 ∼ 120V 2 :単相 AC 200 ∼ 230V ⑦ ネットワーク仕様 無記号:無し D :デバイスネット仕様 (LXA-S のみ ) ⑧ エンコーダ仕様 A :アブソリュート I :インクリメンタル ⑩ 拡張 I/O ボード 1 枚目 (LXA-1 ∼ 4) A :EX-D( 入力 16 点、出力 16 点 ) B :EX-DI( 入力 32 点 ) C :EX-DO( 出力 32 点 ) ⑪ 拡張 I/O ボード 2 枚目 (LXA-1 ∼ 2 のみ ) A :EX-D( 入力 16 点、出力 16 点 ) B :EX-DI( 入力 32 点 ) C :EX-DO( 出力 32 点 ) :単軸…小型 1 軸 :多軸…1 軸 (X) :多軸…2 軸 (X-Y) :多軸…3 軸 (X-Y-Z) :多軸…4 軸 (X-Y-Z-S) 6 AST ドライバ形番 DM-B - 200V - 30 ① ② ③ ① 呼び形番 DM-B(AST アクチュエータ・インクリメンタルタイプ専用) ② 駆動電源 無記号:単相 AC100 ∼ 120V 200V:単相 AC200 ∼ 230V ③ モータ容量 30:30W 50:50W ケーブル形番 AGC - 3M ① ① 呼び形番 ② ケーブル長さ AGC :LXA 用 モータ・エンコーダケーブル AMGC :LXA-1 ∼ 4 用 モータ・エンコーダケーブル BLC :LXA 用 センサ・ブレーキケーブル BGC :DM-B 用 モータエンコーダケーブル BLB :DM-B 用 センサブレーキケーブル 3M: 3m ( 標準 ) 5M: 5m 10M:10m ※ LXA-1 ∼ 4 には AMGC-3M が各軸に 1 本付属してあります。 7 ② 主要仕様 アクチュエータ仕様 形番 AST モータ出力[W] 30 ボールねじリード[mm] 定格 推力[N] 最高搬送速度 最大 注 1) 注 2) [mm/s] 最大可搬質量注 3) [kg] 50 6 12 6 12 99.5 49.7 167.6 83.8 398 198.8 670.4 335.2 300(450) 600(450) 300(450) 600(450) 水平 12 6 20 10 垂直 4 2 10 5 最大ストローク長さ[mm] 600 繰り返し位置決め精度[mm] ± 0.01 注1) 最高搬送速度は、 () のストローク長さ [mm] 以下での値です。 注2) 移動距離が短いと最高搬送速度に到達しない場合もあります。 注3) 最大可搬質量は、加減速度 0.3[G] の定格条件での値です。 共通仕様 メカ部 駆動部 ボールねじ部 転造ボールねじ:軸径8mm LMガイド部 ボールリテーナ入りLMガイドSRS形 カバーリング ステンレスシートタイプ/スリットカバータイプ モータ アウタロータ型 ACサーボモータ 30W/50W エンコーダ ブレーキ保持力 注) [N] (30W/50W共通) ボールねじリード [mm] 17bit インクリメンタル/アブソリュート 6 126.3 12 63.1 注)ブレーキ付きのみ 潤滑 アクチュエータ本体の機能を十分に発揮させるためには潤滑が必要です。 無給脂のままで使用すると転がり部の摩耗が増加したり、早期寿命の原因となる場合があります。 グリースの給脂方法や給脂間隔については、取扱説明書をご参照ください。 標準グリース:THK AFFグリース 簡易クリーン仕様 (96) (115.5) 簡易的なクリーン仕様をご用意しています。アクチュエータ側面に吸引用の継手を取付けることができます(継手は製品 に4個付属します)。 詳しくはTHKまでご相談ください。 8 4-R 1/8 51 26 8 AST アクチュエータ 外形図 AST-*-3(B)-*-*T(ステンレスシートタイプ スライダ1個付き:30Wモータ) B 19 10.5 5 30 5 36 8 27 8 43 10.5 35 61 28 4-M5 深サ9.3 40 9.5 40 11 2-∅4H7 深サ7 4-4.5キリ通シ∅8ザグリ深サ6.3 (取付け用穴) 58 12 28 11 132.3 54 原点 45.5 10.5 96 ストローク 122.3 4-M3 深サ4 15 30 20 38 15.5 9 15.5 48.9 28 18 38 ねじ込み深サ7.5 mm 167.8 (電磁ブレーキ付き) 16 メカエンド 29.5 メカエンド 長さ250mm M4 32 標準 73.3 118.8 (電磁ブレーキ付き) 19 6 A L タップ穴断面 (裏面より取付けの場合) LB ∅8 13 37.4 2×N-M4通シ (※印:取付け用ねじ部) ※ ※ ※ ※ ※ ∅4.5 32 ※ 13 通し穴取付穴断面 (上部より取付けの場合) 100 60 ストローク[mm] 最高搬送速度 [mm/s] ボールねじリード [mm] 50 100 500 550 6 150 200 300 250 300 350 400 450 280 240 600 210 12 600 570 490 420 L(標準仕様) 286.3 336.3 386.3 436.3 486.3 536.3 586.3 636.3 686.3 736.3 786.3 836.3 LB(電磁ブレーキ付き) 331.8 381.8 431.8 481.8 531.8 581.8 631.8 681.8 731.8 781.8 831.8 881.8 A 188 238 288 338 388 438 488 538 588 638 688 738 B 142 192 242 292 342 392 442 492 542 592 642 692 C 100 100 200 200 300 300 400 400 500 500 600 600 E 28 78 28 78 28 78 28 78 28 78 28 78 N 2 2 3 3 4 4 5 5 6 6 7 7 1.8 2.0 2.2 2.4 2.6 2.7 2.9 3.1 3.3 3.5 3.7 3.9 寸法[mm] 取付穴数[個] 質量[kg]注) 注)電磁ブレーキ付き仕様の質量は、上記質量に 0.2kg 加算されます。 9 E C AST-*-5(B)-*-*T(ステンレスシートタイプ スライダ1個付き:50Wモータ) 12 B 28 10.5 19 10.5 5 30 5 11 36 8 27 8 4-M5 深サ9.3 40 11 40 9.5 28 35 2-∅4H7 深サ7 43 4-4.5キリ通シ∅8ザグリ深サ6.3 (取付け用穴) 61 58 141.4 54 原点 131.4 4-M3 深サ4 15 18 96 30 28 38 20 15.5 9 38 16 15.5 48.9 45.5 10.5 ストローク ねじ込み深サ7.5 mm 176.9(電磁ブレーキ付き) メカエンド 29.5 メカエンド 長さ250mm M4 32 標準 82.4 127.9 (電磁ブレーキ付き) 19 6 A L タップ穴断面 (裏面より取付けの場合) LB ∅8 13 37.4 2×N-M4通シ (※印:取付け用ねじ部) ※ ※ ※ ※ ※ ∅4.5 32 ※ 13 100 60 ストローク[mm] 最高搬送速度 [mm/s] ボールねじリード [mm] 50 E C 100 150 通し穴取付穴断面 (上部より取付けの場合) 500 550 6 200 300 250 300 350 400 450 280 240 600 210 12 600 570 490 420 L(標準仕様) 295.4 345.4 395.4 445.4 495.4 545.4 595.4 645.4 695.4 745.4 795.4 845.4 LB(電磁ブレーキ付き) 340.9 390.9 440.9 490.9 540.9 590.9 640.9 690.9 740.9 790.9 840.9 890.9 A 188 238 288 338 388 438 488 538 588 638 688 738 B 142 192 242 292 342 392 442 492 542 592 642 692 C 100 100 200 200 300 300 400 400 500 500 600 600 E 28 78 28 78 28 78 28 78 28 78 28 78 N 2 2 3 3 4 4 5 5 6 6 7 7 1.8 2.0 2.2 2.4 2.6 2.7 2.9 3.1 3.3 3.5 3.7 3.9 寸法[mm] 取付穴数[個] 質量[kg]注) 注)電磁ブレーキ付き仕様の質量は、上記質量に 0.2kg 加算されます。 10 AST AST-*-3(B)-*-*L(スリットカバータイプ スライダ1個付き:30Wモータ) 12 B 30 5 2-M3 10.5 4-M5 深サ9.3 40 9.5 19 11 58 36 43 35 4-4.5キリ通シ∅8ザグリ深サ6.3 (取付け用穴) 5 8 27 8 2-∅4H7 深サ7 11 132.3 10.5 54 ストローク 40 46 9 44 15.5 15.5 ねじ込み深サ7.5mm 原点 195.8(電磁ブレーキ付き) 45.5 150.3 10.5 15 58 56 メカエンド 29.5 メカエンド 長さ250mm 標準 73.3 32 118.8 (電磁ブレーキ付き) 19 6 A L M4 タップ穴断面 (裏面より取付けの場合) LB 37.4 ∅8 2×N-M4通シ (※印:取付け用ねじ部) ※ ※ ※ 13 32 13 ※ ∅4.5 通し穴取付穴断面 (上部より取付けの場合) ※ ※ 100 60 ストローク[mm] 最高搬送速度 [mm/s] ボールねじリード [mm] 50 C 100 150 500 550 6 300 250 300 350 400 450 280 240 600 210 12 600 570 490 420 L(標準仕様) 286.3 336.3 386.3 436.3 486.3 536.3 586.3 636.3 686.3 736.3 786.3 836.3 LB(電磁ブレーキ付き) 331.8 381.8 431.8 481.8 531.8 581.8 631.8 681.8 731.8 781.8 831.8 881.8 A 188 238 288 338 388 438 488 538 588 638 688 738 B 142 192 242 292 342 392 442 492 542 592 642 692 C 100 100 200 200 300 300 400 400 500 500 600 600 E 28 78 28 78 28 78 28 78 28 78 28 78 N 2 2 3 3 4 4 5 5 6 6 7 7 1.8 2.0 2.2 2.4 2.6 2.7 2.9 3.1 3.3 3.5 3.7 3.9 寸法[mm] 取付穴数[個] 質量[kg]注) 注)電磁ブレーキ付き仕様の質量は、上記質量に 0.2kg 加算されます。 11 200 E AST-*-5(B)-*-*L(スリットカバータイプ スライダ1個付き:50Wモータ) 12 30 10.5 19 5 11 2-M3 4-M5 深サ9.3 40 9.5 11 58 36 8 27 8 B 2-∅4H7 深サ7 5 4-4.5キリ通シ∅8ザグリ深サ6.3 (取付け用穴) 43 35 141.4 10.5 54 原点 40 ストローク 46 ねじ込み深サ7.5mm 204.9(電磁ブレーキ付き) 45.5 159.4 10.5 15 58 44 15.5 9 15.5 メカエンド 56 29.5 メカエンド 長さ250mm 標準 82.4 32 127.9 (電磁ブレーキ付き) 19 A 6 L M4 タップ穴断面 (裏面より取付けの場合) LB 37.4 ∅8 2×N-M4通シ (※印:取付け用ねじ部) ※ ※ ※ 13 32 13 ※ ∅4.5 通し穴取付穴断面 (上部より取付けの場合) ※ ※ 100 60 ストローク[mm] 最高搬送速度 [mm/s] ボールねじリード [mm] 50 C 100 150 200 E 500 550 6 300 250 300 350 400 450 280 240 600 210 12 600 570 490 420 L(標準仕様) 295.4 345.4 395.4 445.4 495.4 545.4 595.4 645.4 695.4 745.4 795.4 845.4 LB(電磁ブレーキ付き) 340.9 390.9 440.9 490.9 540.9 590.9 640.9 690.9 740.9 790.9 840.9 890.9 A 188 238 288 338 388 438 488 538 588 638 688 738 B 142 192 242 292 342 392 442 492 542 592 642 692 C 100 100 200 200 300 300 400 400 500 500 600 600 E 28 78 28 78 28 78 28 78 28 78 28 78 N 2 2 3 3 4 4 5 5 6 6 7 7 1.8 2.0 2.2 2.4 2.6 2.7 2.9 3.1 3.3 3.5 3.7 3.9 寸法[mm] 取付穴数[個] 質量[kg]注) 注)電磁ブレーキ付き仕様の質量は、上記質量に 0.2kg 加算されます。 12 AST AST-*-3(B)-*-*LW(スリットカバータイプ スライダ2個付き:30Wモータ) 132.3 B 12 19 10.5 10.5 9.5 4-4.5キリ通シ∅8ザグリ深サ6.3 (取付け用穴) 2-M3 40 54 8 27 8 11 36 58 11 43 35 2-∅4H7 深サ7 4-M5 深サ9.3 〃 〃 5 30 5 原点 45.5 10.5 ストローク 15 46 85 150.3 40 58 15.5 40 5 9 ねじ込み深サ7.5mm 195.8 (電磁ブレーキ付き) 15.5 56 44 メカエンド 29.5 メカエンド 長さ250mm 駆動スライダ フリースライダ 標準 73.3 118.8(電磁ブレーキ付き)19 A 32 6 L M4 タップ穴断面 (裏面より取付けの場合) ∅8 37.4 LB 2×N-M4通シ (※印:取付け用ねじ部) ※ ※ ※ 13 32 13 ※ ∅4.5 通し穴取付穴断面 (上部より取付けの場合) ※ ※ 100 C 60 フレーム長さ[mm] 100 150 200 250 300 350 400 450 500 550 600 ストローク[mm]注1) 55 105 155 205 255 305 355 405 455 505 555 最高搬送速度 [mm/s] ボールねじリード [mm] 6 300 280 240 210 12 600 570 490 420 L(標準仕様) 336.3 386.3 436.3 486.3 536.3 586.3 636.3 686.3 736.3 786.3 836.3 LB(電磁ブレーキ付き) 381.8 431.8 481.8 531.8 581.8 631.8 681.8 731.8 781.8 831.8 881.8 A 238 288 338 388 438 488 538 588 638 688 738 B 192 242 292 342 392 442 492 542 592 642 692 C 100 200 200 300 300 400 400 500 500 600 600 E 78 28 78 28 78 28 78 28 78 28 78 N 2 3 3 4 4 5 5 6 6 7 7 2.4 2.6 2.8 3.0 3.1 3.3 3.5 3.7 3.9 4.1 4.3 寸法[mm] 取付穴数[個] 質量[kg]注2) 注1) 表示ストロークは 2 個のスライダ間が 5mm のときの有効ストロークです。 注2) 電磁ブレーキ付き仕様の質量は、上記質量に 0.2kg 加算されます。 13 E AST-*-5(B)-*-*LW(スリットカバータイプ スライダ2個付き:50Wモータ) 141.4 12 B 2-∅4H7 深サ7 10.5 10.5 9.5 4-4.5キリ通シ∅8ザグリ深サ6.3 2-M3 (取付け用穴) 40 54 8 27 8 11 36 58 11 43 35 19 4-M5 深サ9.3 〃 〃 30 5 5 原点 45.5 10.5 ストローク 15 46 85 159.4 58 15.5 40 5 40 9 15.5 56 44 ねじ込み深サ7.5mm 204.9(電磁ブレーキ付き) メカエンド 29.5 メカエンド 長さ250mm フリースライダ 標準 82.4 127.9 (電磁ブレーキ付き) 19 駆動スライダ A M4 32 6 L タップ穴断面 (裏面より取付けの場合) ∅8 37.4 LB 2×N-M4通シ (※印:取付け用ねじ部) ※ ※ ※ 13 32 13 ※ ∅4.5 通し穴取付穴断面 (上部より取付けの場合) ※ ※ 100 60 E C フレーム長さ[mm] 100 150 200 250 300 350 400 450 500 550 600 ストローク[mm]注1) 55 105 155 205 255 305 355 405 455 505 555 最高搬送速度 [mm/s] ボールねじリード [mm] 6 300 280 240 210 12 600 570 490 420 L(標準仕様) 345.4 395.4 445.4 495.4 545.4 595.4 645.4 695.4 745.4 795.4 845.4 LB(電磁ブレーキ付き) 390.9 440.9 490.9 540.9 590.9 640.9 690.9 740.9 790.9 840.9 890.9 A 238 288 338 388 438 488 538 588 638 688 738 B 192 242 292 342 392 442 492 542 592 642 692 C 100 200 200 300 300 400 400 500 500 600 600 E 78 28 78 28 78 28 78 28 78 28 78 N 2 3 3 4 4 5 5 6 6 7 7 2.4 2.6 2.8 3.0 3.1 3.3 3.5 3.7 3.9 4.1 4.3 寸法[mm] 取付穴数[個] 質量[kg]注2) 注1) 表示ストロークは 2 個のスライダ間が 5mm のときの有効ストロークです。 注2) 電磁ブレーキ付き仕様の質量は、 上記質量に 0.2kg 加算されます。 14 AST コントローラ スーパーFAシリーズAST形を制御できるコントローラです。 実績のあるLXコントローラと取扱い上の互換性を保ちつつ、アブソリュートタイプエンコーダに対応できます。 仕様 多軸 LXA-SA(プログラム) LXA-1 ∼ 4 接続アクチュエータ スーパー FA シリーズ AST 形、KLA 形、KT 形 単相 AC100 ∼ 120V +5 ∼ -15% 50/60Hz 主回路 入力電源 単相 AC200 ∼ 230V +10 ∼ -15% 50/60Hz 制御回路 DC24V ± 10% コントロール部 最大 25W(24V 1A) (ブレーキ仕様時) 最大 75W(24V 3A) (4 軸ブレーキ仕様時) モータ容量 30W:100VA モータ容量 30W:100VA/ 軸 モータ容量 50W:200VA モータ容量 50W:200VA/ 軸 電源容量 ドライバ部 モータ容量 100W:300VA モータ容量 100W:300VA/ 軸 モータ容量 200W:500VA モータ容量 200W:500VA/ 軸 モータ容量 400W:900VA モータ容量 400W:900VA/ 軸 制御軸数 1軸 1∼ 4 軸 位置指令方式 プログラム、I/O 入力 位置検出方式 インクリメンタル・アブソリュート オートチューニング モデル適応制御によるリアルタイムオートチューニング 加減速方式 台形加減速 台形加減速、S 字曲線加減速 プログラム言語 LX 言語(LX-S、LXT コントローラプログラムに対し上位互換) メモリ容量 128KB 512KB プログラム 32 プログラム(最大 500 ライン) 32 プログラム(最大 3000 ライン) プログラム数 ― 容量 位置決め点数 500 ポイント 2000 ポイント データ入出力方式 オペレーティングボックスまたはパソコンソフト マルチタスク機能 ― 8 プログラム並列動作(一般プログラム× 8 +シーケンスプログラム) 入力点数 ― 14 点 8 点(汎用)+ 8 点(汎用 / 専用兼用) 汎用入出力 出力点数 ― 6点 12 点(汎用)+ 4 点(汎用 / 専用兼用) 8 点(スタート、非常停止(N.C. 接 点)、非常停止リセット、CPU リセッ 入力点数 4 点(スタート、非常停止、非常停止リセット、CPU リセット) ト、サーボ ON、一時停止、強制停止、 専用入出力 ブレーキ解除) 6 点(レディ、アラーム、位置決め完了、 2 点(レディ、アラーム) 4 点(レディ、EH アラーム、非常停止中、フェイル) 出力点数 移動中、一時停止中、原点復帰完了) ポイント No. 指定入力 11 点(Pnt No.1 ∼ 500) ― プログラム No. 指定入力 ― 6 点(No.1 ∼ 32) 入出力用外部電源 DC24V ± 10%(貴社にてご用意ください) 拡張 I/O ボード 増設可能枚数 ― 1 ∼ 2 軸:2 枚、3 ∼ 4 軸:1 枚 接続機器 オペレーティングボックスおよびパソコンソフト シリアル通信 通信方式 RS-232C 準拠 ポート数 D-sub 9 ピン× 1 使用・保存温度 使用温度:0 ∼ 40℃(非凍結)、保存温度:-10 ∼ 60℃(非凍結) 使用・保存湿度 使用湿度:80% RH 以下(非結露)、保存湿度:80% RH 以下(非結露) 周辺雰囲気 屋内(直射日光が当たらないこと)、腐食性ガス・引火性ガス・オイルミスト・塵埃のないこと 保護機能 過負荷、過電圧、過電流、誤差過大、エンコーダ通信異常、ソフトリミットエラーなど ロボットケーブル(3m ×各軸 1 本) I/O ケーブル(2m × 1 本) 付属品 I/O ケーブル(2m × 1 本) システム I/F コネクタ(D-sub 9 ピン× 1) OP コネクタ用プラスチック保護キャップ× 1 マルチスプライン機能 拡張 I/O ボード EX-D:入力 16 点、出力 16 点 内蔵オプション ― マルチスプライン機能 拡張 I/O ボード EX-DI:入力 32 点 拡張 I/O ボード EX-DO:出力 32 点 オペレーティングボックス OP-10形(ケーブル長さ3m) オペレーティングボックス OP-2形(ケーブル長さ2m) オプション ロボットケーブル 5m、10m 外部オプション ロボットケーブル 3m、5m、10m 回生抵抗 10W、30W 回生抵抗 10W、30W 日本語版:LXA-PC(Windows2000 SP4 以降、RS-232C 接続ケーブル 2m(Dsub9 ピン)付属) パソコンソフト 英語版:LXA-PCE(Windows2000 SP4 以降、RS-232C 接続ケーブル 2m(Dsub9 ピン)付属) 1∼2軸 200W 以下:262(W)× 195(H)× 154(D) 200W 以下:74(W)× 130(H)× 121.5(D) 400W :302(W)× 195(H)× 154(D) 外形寸法[mm] 400W :74(W)× 139(H)× 125.5(D) 3∼4軸 200W 以下:362(W)× 195(H)× 154(D) 400W :442(W)× 195(H)× 154(D) 200W 以下:0.8 2.7 ∼ 6.7 質量[kg] 400W :1.2 形番 単軸 LXA-SM(ポイント) 基本仕様 制御 プログラム 入出力 通信 使用条件 一般仕様 注)電気設備容量は電源インピーダンスにより変わりますのでご注意ください。 サーボモータ加速時には 2 ∼ 2.5 倍の瞬時電力を必要としますので、コントローラの端子で許容範囲が確保できる電源をご用意ください。 15 命令語一覧 区 分 命令語 機 能 原点復帰関連 HOMSQ サーボ軸原点復帰 ADD 加算 サーボ制御 SRVOP サーボ軸制御 SUB 減算 速度関連 移動関連 軸設定 軸停止 JOG移動 プログラム制御 ポイント制御 サブルーチン ジャンプ FOR文 IF文 区 分 命令語 機 能 ACCEL 加速度、減速度、S字比率の設定 MULT 乗算 SPEED 速度データの設定 DIV 除算 MOVEI 軸のインクリメント移動 MOD 剰余 MOVEP 軸の移動 SIN 正弦関数演算 DTBND データバンドエリアの設定 DTBCL データバンドエリアのクリア 演 算 COS 余弦関数演算 TAN 正接関数演算 逆正接関数演算 MASCK 軸占有宣言 ATAN SHIFT シフトデータセット SQRT 平方根演算 WHERE 軸の現在位置データの読み込み CLEAR 変数のクリア STOP 自タスクの軸移動停止 LET 変数へデータ代入 HALT 他タスクの軸移動停止 AND 論理積演算 JOGON 指定アドレスON中、指定軸JOG移動 OR 論理和演算 JOGOF 指定アドレスOFF中、指定軸JOG移動 XOR 排他的論理和演算 START 指定プログラム起動 COMP データ比較 CUTPG 指定プログラム停止 BININ バイナリデータを変数に読み込み EXIT 自プログラム終了 BINOT 変数からバイナリデータを出力 BCDIN BCDデータを変数に読み込み BCDOT 変数からBCDデータを出力 比 較 REM 注釈文 POSCP ポイントデータのコピー POSCL ポイントデータのクリア DONOT 指定出力アドレスを反転 POSRD ポイントデータを変数に読み込み DORST 指定出力アドレスのOFF POSWT 変数からポイントにデータ書き込み DOSET 指定出力アドレスのON SRBGN サブルーチン開始 WATON 指定アドレスのON待ち WATOF 指定アドレスのOFF待ち SREND サブルーチン終了 GOSUB サブルーチン呼び出し RETRN I/O制御 制御待ち TIMEW 指定時間待ち サブルーチン脱出 TIMCN 指定プログラムのタイマをキャンセル JUMP 指定INDEXへジャンプ SQMWT 複合条件待ち INDEX JUMP命令の制御移行先 OUTRY 指定アドレスをリレー出力 STASK ラダー専用タスク宣言 FOR 指定回数ループ NEXT ループ終端 ラダー専用命令 TIMER タイマリレー出力 FBRK FORループ途中脱出 SPLIN スプライン補間移動 IF 条件判断文 ELSE 条件外実行 ENDIF 条件文終了 マルチスプライン (オプション) MVLIN 直線補間移動1 LXLIN 直線補間移動2 16 AST ピンアサイン ピンNo. I/O 1 − LXA-SM(ポイントタイプ) 2 LXA-SA(プログラムタイプ) ケーブル色 外部24V電源+(P24) 1茶 CPUリセット入力(C-RST) 1赤 3 非常停止入力(EMG) 1橙 4 一時停止入力(STOP) 汎用入力 I 0002 5 強制停止入力(CANC) 〃 I 0003 6 ポイントNo.(PNT 1) 1黄 1緑 〃 I 0004 1青 (PNT 2) 〃 I 0005 1紫 〃 (PNT 4) 〃 I 0006 1灰 〃 (PNT 8) 〃 I 0007 1白 〃 (PNT 10) 〃 I 0008 1黒 7 〃 8 9 10 〃 (PNT 20) 〃 I 0009 2茶 〃 (PNT 40) 〃 I 0010 2赤 〃 (PNT 80) 〃 I 0011 2橙 〃 (PNT100) 〃 I 0012 2黄 2緑 13 14 INPUT 11 12 15 〃 (PNT200) 〃 I 0013 16 〃 (PNT400) 〃 I 0014 2青 〃 I 0015 2紫 17 未使用 18 サーボオン入力(SON) 19 ブレーキ解除入力(BKR) プログラムNo.(PRG 1) 〃 (PRG 2) 2灰 2白 20 未使用 〃 (PRG 4) 2黒 21 〃 〃 (PRG 8) 3茶 22 〃 〃 (PRG10) 3赤 23 〃 〃 (PRG20) 3橙 24 非常停止リセット(E-RST) 25 ポイントスタート(START) 3黄 プログラムスタート(START) 3緑 レディ出力(RDY) 3青 27 アラーム出力(ALM) 3紫 28 29 30 31 OUTPUT 26 32 位置決め完了出力(IP) 3灰 〃 O 0003 3白 一時停止中出力(ST) 〃 O 0004 3黒 原点復帰完出力(HM) 〃 O 0005 4茶 未使用 〃 O 0006 4赤 〃 O 0007 4橙 33 34 汎用出力 O 0002 移動中出力(MV) 〃 − 外部24V電源-(N24) 4黄 ※ I/O ケーブル 2m 付属(LXA-S コントローラに付属してあります。) 出力回路 入力回路 コントローラ内部 内 部 回 路 560Ω 3.3KΩ 外部電源※ + DC24V 各入力 ※ 入出力回路用 DC24V 電源は貴社にてご用意ください。 17 24V 24V 内 部 回 路 コントローラ内部 各出力 負荷 外部電源※ DC24V N + - 外形図 LXA-S*-*-*-* 5 69 162 制御電源コネクタ 5 ∅5 120 端子台カバー 130 139 I/Oコネクタ 注)デバイスネット仕様の場合、 表面パネルのコネクタ形状 が若干異なります。 外形寸法は同様です。 (下図参照) OP-2接続コネクタ 9 5 メインLEDディスプレイ 5 ドライバディスプレイカバー 80 5 I/Oコネクタ 74 エンコーダコネクタ 64.4 バッテリコネクタ デジタルスイッチ 121.5 センサ・ブレーキコネクタ ヒートシンク オペレーティングボックスOP-2(-S) LXAコントローラのプログラム・ポイントデータの作成・編集・実行、パラメータの編集に使用します。 ●プログラム・ポイントデータの作成・編集・実行 ●ジョグ、ダイレクト動作、パラメータ編集、モニター(I/Oポート、フラグ、変数、動作状態等)機能 ●見やすくわかりやすい20文字×4行のLCD表示 ●不測の落下を未然に防ぐハンドストラップ付き(取外し自由) ●安全性を配慮した3ポジション・スイッチ(デッドマン・スイッチ)を設定(オプション:OP-2-S) 20.8 32 32 235 25 105 73 長さ 2000 3ポジション スイッチ 18 AST システム構成図 ポイント・プログラムタイプ PLC(貴社にてご用意ください) LXA-Sコントローラ 3 OP-2 ケーブル一体 2 1 4 アクチュエータ AST形 パソコン (貴社にてご用意ください) LXA-S 標準仕様ケーブル一覧 番号 19 ケーブル型式 備考 ① AGC-*M モータ・エンコーダケーブル *はケーブル長さ。3(m)・5(m)・10(m)から選択 ② BLC-*M センサ・ブレーキケーブル 原点センサ仕様またはブレーキ仕様の場合に使用 *はケーブル長さ。3(m)・5(m)・10(m)から選択 ③ I/Oケーブル ④ APC-2M I/O接続ケーブル・2m・コントローラに付属 通信ケーブル・パソコンソフトに付属 ケーブル モータ・エンコーダケーブル(別売):AGC-*M(*はケーブル長さを記入:3m、5m、10m) 7 5 8 ケーブル断面 18 33 16.5 23 14 12 2.5 20 センサ・ブレーキケーブル(別売):BLC-*M(*はケーブル長さを記入:3m、5m、10m) 7 19 6 15 18 ケーブル断面 I/Oケーブル(コントローラに付属):2m 18 10 34 (黄) 59 43 カラーフラットケーブル 1 (茶) 通信ケーブル(パソコンソフト:LXA-PCに付属):2m 15 パソコンRS232Cコネクタ側 D-Sub9ピン 32.5 32.5 15 回生抵抗ケーブル(回生抵抗に付属):1m AWG18ケーブル2本(白、黒)が付属してあります。取扱説明書にしたがって、回生抵抗端子に接続してください。 20 AST システム構成図 パルス列タイプ DM-Bドライバ 位置決めパルス発生ユニット 3 PLC(貴社にてご用意ください) 2 1 DM-B 標準仕様ケーブル一覧 番号 アクチュエータ AST形 ケーブル型式 備考 ① BGC- * M モータ・エンコーダケーブル *はケーブル長さ。3(m) ・5 (m) ・10 (m)から選択 ② BLB- * M センサ・ブレーキケーブル(PLC 側先端バラ) 原点センサ仕様またはブレーキ仕様の場合に使用 *はケーブル長さ。3 (m) ・5(m) ・10 (m)から選択 ③ I/O ケーブル DM-B 側コネクタのみ付属 ケーブル配線は貴社にてお願いします DM-Bドライバ 90 5 40 95 35 5 5 ∅5取付穴 100 5 MITSUBISHI AC100V 130 120 L1 L2 P C U V W MODE MR-C10A1 UP DOWN SET CN2 80 5 5 5 CN1 21 仕様 形番 DM-B DM-B-200V 基本仕様 スーパー FA シリーズ AST 形※ 1、※ 2 接続アクチュエータ 入力電源 単相 AC100 ∼ 120V+20 ∼ -15% 50/60Hz 単相 AC200 ∼ 230V+20 ∼ -15% 50/60Hz モータ容量 30W:100VA モータ容量 50W:200VA 電源容量 制御 指令方式 パルス列入力 位置検出方式 インクリメンタル オートチューニング モデル適応制御によるリアルタイムオートチューニング 位置制御 指令パルス CCW/CW パルス列、符号 + パルス列、A/B 相パルス列 入力方式 オープンコレクタ、差動ラインドライバ 入力周波数 最大 200kpps パルス列 位置決め帰還パルス 32000ppr 位置決め完了幅設定 リード 6mm:200pulse、リード 12mm:100pulse 指令パルス倍率 電子ギア比 リード 6mm:80/3、リード 12mm:80/6 誤差過大設定 入出力 専用入出力 150,000pulse 入力点数 5点 (サーボ ON、正転ストロークエンド、逆転ストロークエンド、クリア、正転・逆転パルス列) 出力点数 3 点(アラーム、位置決め完了、検出器 Z 相パルス) DC24V ± 10%(貴社にてご用意ください) 使用・保存温度 使用温度:0 ∼ 50℃(非凍結)、保存温度:-20 ∼ 65℃(非凍結) 使用条件 入出力用外部電源 使用・保存湿度 使用湿度:90% RH 以下(非結露) 、保存湿度:90% RH 以下(非結露) 周辺雰囲気 屋内(直射日光が当たらないこと) 、腐食性ガス・引火性ガス・オイルミスト・塵埃のないこと 標高 海抜 1000m 以下 振動 2 以下 5.9m/s(0.6G) 保護機能 過負荷、過電圧、過電流、誤差過大、検出器異常検出、不足電圧検出など 付属品 I/O コネクタ(DM-B 側のみ付属)× 1 一般仕様 オプション 内蔵オプション ― 外部オプション センサ・ブレーキケーブル 3 m、5 m、10m ロボットケーブル 3 m、5 m、10m 回生抵抗 10W、30W 外形寸法[mm] 40(W) ×130(H) ×100(D) 質量[kg] 0.6 ※ 1 インクリメンタル仕様専用です。 ※ 2 原点センサが付属してありませんので外付けセンサ仕様をお選びください (アクチュエータ形番の末尾:-SS、-RS)。 ケーブル モータ・エンコーダケーブル(別売):BGC-*M(*はケーブル長さを記入:3m、5m、10m) 8 ケーブル断面 18 33 16.5 23 14 12 2.5 20 センサ・ブレーキケーブル(別売):BLB-*M(*はケーブル長さを記入:3m、5m、10m) 6 ケーブル断面 18 19 BKM BKP MG LIMIT M24 22 AST 回生抵抗 MR-RB013/033-A 最大可搬質量の上限近くで使用する場合は、回生抵抗をコントローラに接続する必要があります。 ケーブルの取付け方法については取扱説明書をご参照ください。 2-∅3.2 ∅H F E ∅H C G B A 回生抵抗型式 回生電力 [W] D 寸法[mm] A B C D E F G H 質量 [kg] 抵抗値 [Ω] MR-RB013-A 10 110 101 85 18 35 16 4.5 18 0.1 52 MR-RB033-A 30 192 173 152 26 54 22 6 26 0.2 52 LXAコントロールセンター LXA-PC(パソコンソフト) パソコンソフトLXA-PCは、Windows2000(SP4以上)、XPの動作するパソコンを使用して、プログラムの作成と編 集、ポイントデータの編集とティーチング、アクチュエータの操作、プログラムの実行とモニタなどが簡単にできるソフト ウェアです。製品には専用のRS232C通信ケーブルが付属してあります。 ●プログラムのアップロード L X Aコントローラのプログラム、ポイントデータ、パラ メータをパソコン上にアップロードし、ディスクに保存す ることができます。 またパソコンに保存されたデータをコントローラにダウ ンロードすることもできます。 ● 豊富なモニタ機能 コントローラに接続し、アクチュエータを動作させなが ら、プログラム、I/O、変数、フラグ、モータの状態等を モニタすることができます。 ●プログラムのオフライン編集 オペレーティングボックスでのプログラム入力は、コン トローラに接続しなければできませんが、 パソコンソフトを使用すれば、パソコン単独でもプログ ラムの作成、編集が可能です。 ●クイックヘルプエディタ機能 初心者の方でも、プログラミングを強力にサポートします。 リストから命令語を選択し、説明を見ながら必要な文字・数値を入力すれば、プログラムを作成することができます。 簡易プログラムチェック機能も搭載されていますので、基本的なプログラムミスがすぐ発見できます。 注1) Windows2000(SP4以上)、XPでの動作を確認しておりますが、全てのパソコンでの動作を保証するものではありません。 注2) RS232Cポートが無いパソコンの場合は、USBポートを利用し、USB-RS232C変換器を経由して接続することができます。 ただし、お使いのシステム環境によっては通信が不安定になる場合があります。 23 サンプルプログラム LXA-SM動作サンプル(ポイントタイプ) 1. 絶対位置移動サンプル 1)ポイントデータ例 No. 座標 移動機能 P001 50.000 0(イチ) P002 130.500 0(イチ) P003 285.442 0(イチ) P004 0.000 0(イチ) 2)動作例 速度 速度 加速度 減速度 移動座標 移動機能 2. 連続移動サンプル 1)ポイントデータ例 3. ピッチ移動サンプル 1)ポイントデータ例 100mm/s 0.5G 0.5G 50.000mm 停止 0.3 1.0 ポイント3指定 スタート 位置決め完了 300mm/s 0.5G 0.5G 130.500mm 停止 速度 30 400 100 600 1.0 No. 座標 移動機能 P001 100.000 0 (イチ) P002 20.000 2 (ピッチ) P003 0.000 0 (イチ) 速度 500 400 600 スタート 速度 加速度 減速度 移動座標 移動機能 600mm/s(逆方向) 1.0G 1.0G 0.000mm(原点に戻る) 停止 1.0 ポイント4指定 位置決め完了 400mm/s 0.7G 0.7G 300.000mm 連続 速度 300mm/s 1.0G 0.3G 285.442mm 停止 スタート ポイント1指定 スタート 位置決め完了 加速度 減速度 0.7 0.7 30mm/s 速度 0.7G 加速度 0.7G 減速度 移動座標 30.000mm 連続 移動機能 2)動作例 ポイント4指定 ポイント1、ポイント2は 止まらずに通過し、 ポイント3で停止する。 ポイント1指定 速度 1.0 1.0 600 スタート 位置決め完了 No. 座標 移動機能 (パス) P001 30.000 1 (パス) P002 300.000 1 (イチ) P003 370.000 0 (イチ) P004 0.000 0 2)動作例 加速度 減速度 0.5 0.5 ポイント2指定 ポイント1指定 スタート 速度 100 300 100mm/s 0.7G 0.7G 370.000mm 停止 スタート 停止中 − − − − 600mm/s(逆方向) 1.0G 1.0G 0.000mm(原点に戻る) 停止 加速度 減速度 1.0 1.0 ポイント2指定 現在位置から座標値分移動する ポイント2指定 ポイント2指定 ポイント3指定 スタート スタート スタート スタート 位置決め完了 位置決め完了 位置決め完了 位置決め完了 500mm/s 停止中 400mm/s 400mm/s 400mm/s 停止中 600mm/s(逆方向) 1.0G 1.0G − 1.0G 1.0G 1.0G − 1.0G 1.0G − 1.0G 1.0G 1.0G − 100.000mm − 120.000mm 140.000mm 160.000mm − 0.000mm(原点に戻る) ピッチ 停止 ピッチ ピッチ 停止 − − 24 AST LXA-SAサンプルプログラム(プログラムタイプ) 1)システム概要 ・装置の組合せ形式としてはYZ形で、Y軸はサーボ、Z軸はシリンダで上下させます。 ・Z軸の先端にはエアチャックが取付けられ、ワークを把持します。 ・シリンダとチャックの電磁弁は共にシングル動作とします。 ・シリンダの上下端にはセンサが取付けられ、動作を確認することができます。 ・エアチャックの開閉は確認センサが無いので、0.5秒のタイマーで動作完了とします。 ・シリンダとチャックの制御はL X A-SAで行い、上位コントローラとは起動待ち出力と起動入力でハンドシェイクを行 います。 シーケンサ LXA-SA アクチュエータ AST形 シリンダ ⑦ ⑥ Y軸 ① ④ ⑤ ② ③ Z軸 取出し点 払出し点 2)操作説明 ・原点復帰後、作業原点に移動します。 ・上位コントローラからの起動により、取出し点でワークを取出し、払出し点まで持っていきます。 ・水平移動はサーボで行い、上下はシリンダ、ワーク把持はエアチャックを用います。 ・作業が終了したら作業原点に戻り次の起動を待ち、作業を繰り返します。 ・作業終了時に終了入力が入っていたら待機点に移動してサーボオフしプログラムを終了します。 3)フローチャート 【メインプログラム】 【サブプログラム】 スタート スタート 原点復帰 下降 シリンダ出力ON 作業原点移動 作業原点出力ON OFF 下降端入力 ON OFF チャック出力反転 起動入力 開閉 ON 作業原点出力OFF タイマー0.5秒 チャック動作時間 取出し点上へ移動 シリンダ出力 上昇 サブルーチン呼出 OFF 取出し点上へ移動 ON サブルーチン呼出 OFF リターン 終了入力 ON 待機点上へ移動 サ−ボオフ 終了 25 上昇端入力 4)入出力割付 I/O 入力 出力 アドレス 機能 I0002 起動入力 I0003 プログラム終了 I0004 下降端センサ I0005 上昇端センサ O0002 作業原点出力 O0003 シリンダ動作(ON:下降、OFF:上昇) O0004 チャック動作(ON:閉、OFF:開) 5)ポイントデータ例 No 座標 コメント P001 100.000 作業原点 P002 175.300 ワーク取出し位置 P003 57.920 ワーク払出し位置 P004 0.000 待機位置 6)プログラム例 コマンド 計算1 1: ライン ラベル/SQM HOMSQ AX 2: SPEED 500 3: INDEX 1 計算2 計算3 計算4 計算5 計算6 コメント 原点復帰 0.7 速度500mm/s、加速度0.7G 4: MOVEP P001 5: WATON I0002 起動入力待ち 6: DORST O0002 作業原点出力OFF 7: MOVEP P002 ワーク取出し点移動 8: GOSUB HA 9: MOVEP P003 10: GOSUB HA 11: JUMP 1 11:1 SQM MOVEP 13: SRVOP 15: サブルーチン呼び出し ワーク払出し点移動 サブルーチン呼び出し 終了入力OFFなら最初に戻る P004 待機点移動 AX EXIT A 作業原点・作業原点出力ON LDNI0003 12: 14: O0002 サーボオフ 終了 シリンダ・チャックサブルーチン SRBGN 16: DOSET O0003 シリンダ下降 17: WATON I0004 下降端センサ 18: DONOT O0004 チャック開閉反転 19: TIMEW 50 20: DORST O0003 21: WATON I0005 22: SREND タイマー0.5秒 シリンダ上昇 上昇端センサ サブルーチン終了リターン 26 スーパー FAシリーズ AST ご使用上の注意点 ●使用環境 アクチュエータとドライバは、使用環境が悪いと故障の原因となりますので、次のような場所で使用してください。 ・周囲温度0 ∼ 40℃の範囲内、周囲湿度80% RH以上の範囲内、凍結、及び結露が生じない場所 ・腐食性ガスや可燃性ガスがない場所 ・鉄粉等の誘電性のある粉体、塵埃、オイルミスト、切削液、水分、塩分、有機溶剤が飛散しない場所 ・直射日光、輻射熱が当たらない場所 ・強電界、強磁界の発生しない場所 ・振動や衝撃が本体に伝わらない場所 ・点検や清掃のしやすい場所 ●アクチュエータ取付面 ・機械加工、またはそれに準じた精度を持つ平面としてください。 ●安全上の注意 ・作業の前に、JIS規格「産業用マニピュレーティングロボット−安全性」 (JIS B8433)および厚生労働省「労働安全衛生規則」 を精読し、遵守してください。 ・取扱説明書をよく読み、内容を十分理解し、安全のための注意事項は、必ず厳守してください。 ■取扱説明書 ・ 「スーパー FAシリーズ AST形 取扱説明書」と「コントローラ LXA形 取扱説明書」は、THKテクニカルサポートサイト にログイン後、ダウンロードできます。 テクニカルサポートサイト https://tech.thk.com/ ●「LM ガイド」「ボールリテーナ」「 」は THK 株式会社の登録商標です。 ●本カタログ記載の図・写真と実際の製品とでは異なる場合があります。 ●改良のため予告なしに外観、仕様等変更することがありますので、ご採用の時は事前にお問い合わせください。 ●カタログの制作には慎重を期しておりますが、誤字・脱字等により生じた損害については、責任を負いかねますのでご了承ください。 ●弊社製品・技術の輸出及び輸出の為の販売につきましては、外国為替及び外国貿易法、及びその他の法令の遵守を基本方針としております。 尚、弊社製品の単品での輸出については、予めご相談ください。 無断転載を禁ずる
© Copyright 2026 Paperzz