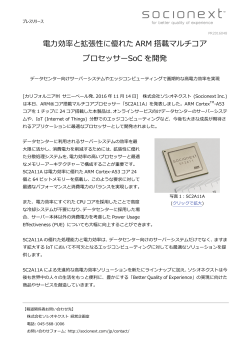
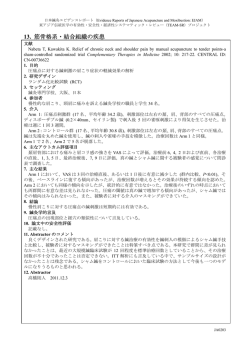
1F15 可補償性に基づくフレキシブルマニピュレータの 位置決め性能評価 吉川 恒夫(京都大学) ○平谷 健太郎(京都大学) 金岡 克弥(立命館大学) Positioning Ability Evaluation of Flexible Manipulators based on Compensability Tsuneo YOSHIKAWA (Kyoto Univ.), *Kentaro HIRATANI (Kyoto Univ.) and Katsuya KANAOKA (Ritsumeikan Univ.) Abstract—In this paper, a positioning ability evaluation method for flexible manipulators is proposed. This method is based on the concept of the compensability of flexible manipulators. In order to utilize the compensability for evaluating flexible manipulators which have various size and structures, appropriate normalization and integration in a task area are considered. The validity of the proposed evaluation method has been verified by numerical simulations. Key Words: Flexible manipulator, Positioning ability evaluation, Compensability, Compensability ellipsoid, Normalization. 1. はじめに フレキシブルマニピュレータを適切に制御するため には,振動抑制,位置誤差補償などを行なう必要があ る.そのため,制御に関する研究が数多く行われてき た.一方,制御のみではなく設計の観点を含めて考え ると,振動抑制や位置誤差補償を行いやすい構造のフ レキシブルマニピュレータを設計することができれば 有益であると考えられる.フレキシブルマニピュレー タの構造評価に関しては,内山らによる可補償性につ いての研究 1, 2) が挙げられる.可補償性は,単一のマ ニピュレータの,ある姿勢における補償のしやすさを 表現する指標であるが,本報告では,この可補償性の 考え方に基づき,異なる大きさ,構造を持つフレキシ ブルマニピュレータについて,空間的な広がりを持つ 作業領域における位置決め性能を比較するための評価 指標を提案する.異なる大きさ,構造に対応するため に,可補償度の定義 1) では必ずしも明確でなかった正 規化の手法をマニピュレータの構造に依存するように 定義し,また,手先効果器の作業領域を定めて空間積 分を行うことで,領域全体での評価を試みる. 2. となる.ただし,J θ , J e はそれぞれ θ, e に関するヤコ ビ行列であり,J θ = ∂p/∂θ ∈ <m×n , J e = ∂p/∂e ∈ <m×g である. 3. フレキシブルマニピュレータの可補償性 本章では,文献 1) で定義されているフレキシブルマ ニピュレータの可補償性について確認する. 3·1 可補償性の定義 定点 p0 , θ 0 , e0 において,実現可能な任意の δe に よって生じる δp をゼロに補償する δθ が存在すれば, フレキシブルマニピュレータはその点で可補償である という.フレキシブルマニピュレータが可補償である 場合,式 (2) から次式が成り立つ. J θ δθ + J e δe = 0 3·2 可補償度 フレキシブルマニピュレータの手先誤差補償におい ては,一定の δe に対して必要な補償量 δθ が小さけれ ば小さいほど有利であると考えられる.この δθ の解 は,フレキシブルマニピュレータが可補償である場合, 運動学 δθ = −J θ + J e δe 一般に,フレキシブルマニピュレータの運動学は,次 式のように表される. p = f (θ, e) (1) ただし,p ∈ <m は手先効果器の位置姿勢を表す m 次 元ベクトル,θ ∈ <n は n 自由度関節変位ベクトル, e ∈ <r は g 次元で有限次元近似された弾性変位ベク トルである.<n は n 次元ユークリッド空間を表す. ある定点 p = p0 , θ = θ 0 , e = e0 の近傍で微小変 位 δp, δθ, δe を考える.定点近傍で式 (1) を線形化し, 二次以上の微小項を無視すると, δp = J θ δθ + J e δe (3) (4) として与えられる.J + θ は J θ の疑似逆行列を表す. 弾性変位と補償量の重みを評価するために,δθ と δe を次のように正規化する. δθ = Θδ θ̂ (5) δe = Eδê (6) Θ, E は正規化の重みを表す対角行列,δ θ̂, δê は正規 化された値を表す.このとき,式 (4) から, (2) 日本ロボット学会 創立20周年記念学術講演会 (2002年10月12日∼14日) δ θ̂ = −Cδê C=Θ −1 (7) + J θ J eE (8) となる. ユークリッドノルム kδêk が kδêk ≤ 1 を満足するよ うな弾性変位 δê に対して,関節変位の補償量 δ θ̂ が描 く楕円体を可補償性楕円体と呼ぶ.また,可補償度 Ic は次式によって定義される. 1 Ic = p (9) det CC T 可補償度 Ic は,可補償性楕円体の体積の逆数に比例す る量であり,必要な補償量 δ θ̂ が小さいほど可補償度 は大きな値となり,手先誤差補償が容易である. 4. 機構評価における可補償度の問題点 本章では,様々な機構について,可補償度を適用し て評価する際に考慮すべき点を列挙する. 4·1 δθ の正規化 異なる関節構成のマニピュレータを比較する場合,関 節変位 θ には,回転,旋回,直動など,さまざまな要 素が考えられる.また,運動学的な関節配置により,同 じ δθ であっても手先における弾性変位 δp の補償に及 ぼす影響が異なる.そこで,この影響を考慮して,Θ によって適切な正規化を施す必要がある. 4·2 δe の正規化 作業領域の設定 可補償度はある定点 θ 0 , e0 における指標であるの で,与えられたタスクに応じた手先効果器の作業領域 が定められた場合,領域全体に対しての指標として利 用する際には何らかの工夫が必要である.また,作業 領域に対するマニピュレータ設置位置も可補償度に影 響するため,評価に加えられることとなる. 5. 提案する評価指標 本章では,正規化の重み Θ と E を適切に設定し, また作業領域を評価に導入して,フレキシブルマニピュ レータの位置決め性能についての評価指標を提案する. ここでは異なる構造のフレキシブルマニピュレータの 比較検討について考えているが,関節自由度数 n はそ れぞれのアームで同じであると仮定する. 5·1 Θ = diag[δΘ1 , δΘ2 , · · · , δΘn ] δl δΘj = p Jθ1j 2 + Jθ2j 2 + · · · + Jθmj 2 Θ の設定 δθ の正規化は,それぞれの関節を単独で変位させた 場合に,ある一定量 δl の手先変位を生じるような関節 変位量について行う.すなわち, kδpk = kJ θ δΘj k = δl (10) T δΘj = [0, · · · , 0, δΘj , 0, · · · , 0] (11) を満足するような第 j 関節 (j = 1, 2, · · · , n) の微小変 位 δΘj を,第 j 関節の正規化の重みとする.ただし, (12) (13) と定められる.ここで,Jθij は J θ の第 ij 要素である. Θ をこのように設定することにより,マニピュレータ の構造に関わらず,第 j 関節の正規化関節変位 δ θ̂j が 同じであれば,常に同じ手先変位量 kδpk が対応する こととなる. 5·2 E の設定 δe の正規化は,重力による静的な弾性変位量の最大 値について行う.すなわち,弾性変位の各自由度につ いての正規化の重みを,マニピュレータが任意の姿勢 を取る場合に,任意の方向の重力加速度に対して生じ 得る静的な弾性変位量の最大値とするものである. たとえば,マニピュレータの弾性変位の第 k 自由度 の値 ek が,第 j リンク先端の横方向の並進たわみ量 であると仮定すると,静的な弾性変位量の最大値 δEk は重力加速度が第 j リンクに対して垂直方向にかかる ときに生じる.その値は,片持ち梁の変形の式から δEk = 構造や大きさの異なるマニピュレータを比較する際, 生じる弾性変位も構造に依存するはずである.この影 響を考慮して妥当な評価を行うためには,弾性変位が 構造に依存して適切に重み付けされるように E を決定 する必要がある. 4·3 δΘj ∈ <n は,第 j 要素が δΘj で,その他の要素がす べて 0 であるようなベクトルである.したがって, lj 2 (3wj lj 2 + 8Wj lj − 12Mjmax ) 24(EI)j (14) となる.ただし,lj は第 j リンク長さ,(EI)j は第 j リンクの曲げ剛性,wj は第 j リンク全体の等分布荷 重,Wj は第 j リンク先端にかかる,リンク i + 1 以 降の全荷重,Mjmax は第 j リンク先端にかかる,リン ク i + 1 以降の全荷重に起因するモーメントの取り得 る最大値である. 以上のように,マニピュレータの構造を考慮して,全 自由度の値 δEk (k = 1, 2, · · · , g) を静力学的に定める ことで,正規化の重み E が求められる. E = diag[δE1 , δE2 , · · · , δEg ] (15) 5·3 手先作業領域の考慮 可補償度は,ある定点近傍での評価であるが,手先 効果器の作業領域全体での評価を行うため,可補償度 Ic を作業領域 V 内で平均した値 I¯c を考える. Z 1 Ic dV (16) I¯c = V V ただし,V は作業領域の体積である.作業領域の概念 を導入することで,特定の作業領域に対する構造の最 適化,およびマニピュレータ設置位置の最適化も考慮 した評価指標となる. 結局,フレキシブルマニピュレータの手先位置決め の評価指標として I¯c を用いることで,第 4 章で考慮 した問題点に対して妥当な評価が可能となると期待さ れる. 6. 数値計算例 本章では,評価指標 I¯c を用いて,数値的に機構を評 価した例を挙げる. Table 1 Parameters for numerical simulations Arm 1 (short) 1 (long) 2 (short) 2 (long) 200.0 0.600 0.600 0.167 200.0 0.750 0.750 0.167 200.0 0.600 0.600 0.167 200.0 0.750 0.750 0.167 4.000 4.000 4.000 4.000 Links EI [Nm2 ] Length l1 [m] Length l2 [m] Density [kg/m] Joints Mass [kg] 6·1 評価対象 Fig. 1 に示す 2 つの構造の 3 次元 3 自由度アー ムを考える.Fig. 1 (a), (b) の Arm 1 では,第 1 関 節が旋回関節であり,第 2, 3 関節が互いに平行な回転 軸を持つ回転関節である.Fig. 1 (c), (d) の Arm 2 では,第 1 関節が旋回関節であり,第 2, 3 関節が互 いに 90◦ ねじれた回転軸を持つ回転関節である.各構 造にそれぞれ,リンク長のみ異なる 2 種類のアームを 考え,これらを Arm 1 (short), Arm 1 (long), Arm 2 (short), Arm 2 (long) とする.各アームのパラメータ を Table 1 のように設定した.これら 4 種類のアーム について,Fig. 1 中に手先を中心とする半径 30 [cm] の球状の作業領域を設定し,提案手法によって I¯c を計 算した. これらのアームでは,アームを伸ばしきった姿勢で アームと垂直方向に重力がかかる場合に最大弾性変位 が生じ,これが弾性変位の正規化の重み E となる.ま た,式 (16) の計算では,手先作業領域の球を適当に等 分割して各点での Ic を求めて加算し,分割数で割って 平均を求めた. 6·2 評価結果 I¯c の計算結果を Table 2 に示す.また,手先作業領 域の中心を通り yz 平面に平行な面内の可補償性楕円 体分布を Fig. 2 に示す.これは,Fig. 1 (a), (c) にお いて,手先作業領域として描かれている円に対応する 部分であり,紙面右方向に各アームの基部があり,そ の座標軸方向は Fig. 1 にならうものである. Table 2 Evaluation results Arm I¯c 1 (short) 11218 1 (long) 4197 2 (short) 7732 2 (long) 3620 6·3 考察 Arm 1 (short) と (long) や Arm 2 (short) と (long) のように同構造でサイズが異なる場合,可補償度の観 点からは,アームが長いほど補償能力が高いと判断さ れる.しかし,長くなれば弾性変位も増大するため,必 ずしも可補償度の評価は適切ではない.Table 2 では, 短い方に有利な評価となっており,正規化が適切に行 われていることが分かる. Arm 1 と Arm 2 の比較では,Arm 1 の方が有利と なった.これは,Fig. 2 から分かるように,Arm 2 の 楕円体は Arm 1 と比較して扁平であることが原因と考 えられる.すなわち,Arm 2 の構造は誤差の補償能力 に指向性が強く,Arm 1 の方が一様に補償可能である ことを示している. 7. おわりに 本報告では,可補償度をフレキシブルマニピュレータ の評価指標として使用する手法について考察した.そ の際,関節変位,弾性変位の正規化を構造に依存する ように定め,手先の作業領域全体に拡張することで,異 構造フレキシブルマニピュレータの評価が妥当に行え ることを数値例で示した. ただし,本手法の妥当性は,数値結果から直感的に 判断されているものであり,何らかの客観的な手法で 確認する必要がある.また,本手法では静的な挙動の み考慮しているため,動的な評価指標としての妥当性 については不明である.今後,動的な制振性能に対し ても評価を試みる予定である. 参考文献 1) 姜,内山:“フレキシブルロボットアームの可補償性”,日 本ロボット学会誌,vol. 6, no. 5, pp. 416–423, 1988. 2) 内山:“フレキシブル・マニピュレータの軌道制御”,日 本ロボット学会誌,vol. 12, no. 2, pp. 184–191, 1994. (a) Arm 1 (top view) (c) Arm 2 (top view) (a) Arm 1 (short) (b) Arm 1 (long) (b) Arm 2 (short) (c) Arm 2 (long) (b) Arm 1 (front view) (d) Arm 2 (front view) Fig.1 Examples of flexible manipulators Fig.2 Distribution of compensability ellipsoids
© Copyright 2026 Paperzz