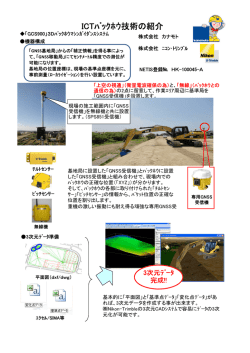
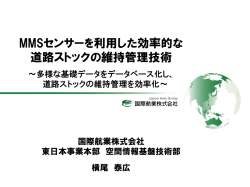
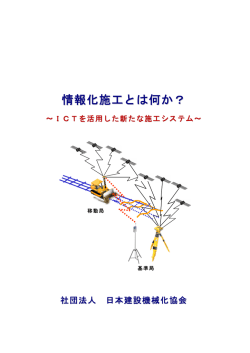
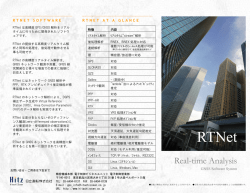
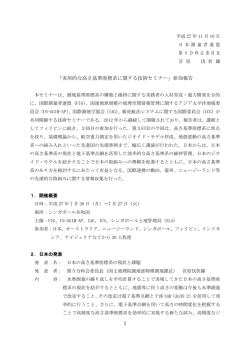
情報化施工マニュアル(案) 【キャリブレーション編】 平成 24 年 7 月 北海道開発局事業振興部 - 目 1. 次 - 情報化施工とは ............................................................ 1 1.1. 情報化施工とは ............................................................ 1 1.2. TS/GNSS による測量概要 ..................................................... 3 1.2.1. 情報化施工で利用する測量技術(機器) .................................... 3 1.2.2. TS(トータルステーション) .............................................. 4 1.2.3. GNSS .................................................................... 4 1.3. 代表的な情報化施工 ........................................................ 6 2. 情報化施工(キャリブレーション)の実施フロー .............................. 8 3. 情報化施工(キャリブレーション)の準備 .................................... 9 3.1. 3.2. 3.3. 3.4. 3.5. 3.6. 3.7. 3.8. 4. 現地調査に基づく適用確認【受注者】 ........................................ 9 機器・ソフトウェア等の準備【受注者】 ..................................... 10 衛星捕捉状況の確認(スカイプロット)【受注者】 ............................ 11 基地局の設置【受注者】 ................................................... 13 無線影響度確認【受注者】 ................................................. 14 座標変換(ローカライゼーション) 【受注者】 ................................ 15 施工計画書の作成【受注者】 ............................................... 16 施工計画書の確認【発注者】 ............................................... 17 施工現場におけるキャリブレーション方法 ................................... 18 4.1. 4.2. 5. キャリブレーション【受注者】 ............................................. 18 キャリブレーション確認【受注者・発注者】 ................................. 20 その他 ................................................................... 21 5.1. 5.2. 5.3. 情報化施工における施工管理、監督・検査要領 ............................... 21 用語集 ................................................................... 22 Q&A ...................................................................... 24 はじめに 近年、従来施工に代わる新しい施工技術として、情報化施工が各現場で導入されつつあ る。情報化施工は、TS(トータルステーション)、GNSS(衛星測位システム)などの位 置特定技術、MC(マシンコントロール)、MG(マシンガイダンス)などの移動体制御技 術、ICT(情報通信技術)を活用することで、従来と比較して効率的な施工を実現する。 情報化施工の特徴の 1 つとして、丁張り、検測等の簡素化が挙げられる。設計データを 3 次元化することで、システム上で電子丁張りなどが設定され、その情報を施工機械やオ ペレータなどに提供することで、作業プロセスの省力化を図ることができる。 平成 20 年 7 月 31 日に情報化施工推進会議により、 「情報化施工推進戦略」が公表され、 国土交通省を中心として、情報化施工の普及促進に向けた各種取り組みが進みつつある。 また、平成 22 年 8 月 2 日発出の国土交通省の通達「情報化施工技術の一般化・実用化の 推進について」では、早期に一般化・実用化を目指す情報化施工技術として、下記の 5 つ の情報化施工技術を掲げている。 <平成 25 年度に一般化する情報化施工技術> TS による出来形管理 MC(モータグレーダ) <早期実用化に向けて検討を進める情報化施工技術> TS/GNSS による締固め管理 MC/MG(ブルドーザ) MG(バックホウ) 上記の 5 つの情報化施工技術の共通項として、TS/GNSS など、精度の高い測量機器(技 術)の活用が挙げられる。 特に、MC/MG においては、一般的に GNSS が広く活用されているが、精度を確認・確 保するためのキャリブレーション等が重要となる。 情報化施工マニュアル【キャリブレーション編】(以下「本マニュアル」とする。)で は、情報化施工において必要不可欠な要素技術である GNSS のキャリブレーションを対象 として、現場における具体的な留意点等について解説する。 1 情報化施工とは 1. 情報化施工とは 1.1. 情報化施工とは 情報化施工とは、情報通信技術(ICT)の活用により、従来の施工技術と比較して、高 い生産性、施工品質を実現するものである。 国土交通省では、「情報化施工推進戦略[H20.7.31](情報化施工推進会議)」を策定し、 情報化施工を推進している。 【参照 URL】http://www.mlit.go.jp/report/press/sogo15_hh_000009.html ※情報化施工推進戦略[H20.7.31](情報化施工推進会議)より抜粋 図 1-1 情報化施工の実現イメージ 1 1 情報化施工とは 情報化施工では、位置特定技術(TS/GNSS など)、移動体制御技術(MC/MG など)、 情報通信技術(ICT)等を活用することで、施工プロセスを改善し、丁張り設置、施工、 検測、品質管理・出来形管理の省力化、合理化を実現する。 情報化施工の導入メリットとして、生産効率、品質の向上に加えて、安全性の向上、熟 練技術者不足への対応、CO2 発生量の削減などがあげられる。 情報化施工の要素技術 位置特定技術 移動体制御技術 情報通信技術 TS/GNSS など MC/MG など ICT 情報化施工のメリット 国 民 工事発注者 施工企業等 確実で安全できる品質を提供 工事期間をより短く CO2 発生量も抑制 求める品質・出来形を確実に確認 施工精度の向上で設計のスリム化が期待 効率的・効果的な管理を支援 技術者判断も支援 現場作業の効率化(工期短縮・省人化)を実現 熟練者不足に対応 安全性が向上 建設現場のイメージが変わる 技術競争力が強化 2 1 情報化施工とは 1.2. TS/GNSS による測量概要 1.2.1. 情報化施工で利用する測量技術(機器) TS 1台の機械で角度(鉛直角・水平角)と距離を同時 に測定することができる電子式測距測角儀。取得し た角度と距離から計測点の座標計算を瞬時に行うこ とができ、データを記録することも可能。自動追尾 式のものは、MC などに用いられる。 GNSS 人工衛星からの信号を利用して、地球上における現 在位置を測定するためのシステム。 GPS(アメリカ)、GLONASS(ロシア)などがある。 情報化施工では、建設機械(移動局)のリアルタイ ムの位置を計測するために、RTK-GNSS 測位が良く 利用される。 レーザ スキャナー レーザ光線による測距で広範囲の面的なデータを取 得する。 計測点とセンサの間をレーザパルスが往復する時間 から距離を計測し、同時にレーザを発射した方向を 計測することで、計測点の 3 次元座標を取得する。 短時間で広範囲を計測できることが特徴として挙げ られる。 ※図は、機器メーカパンフレット等より抜粋 3 1 情報化施工とは 1.2.2. TS(トータルステーション) TS(トータルステーション)では、測角・測距から位置を求めることができる。 ※建設 ICT ざっくりシリーズ[H22. 1](中部地方整備局建設ICT導入研究会)より抜粋 図 1-2 TS のイメージ図 1.2.3. GNSS (1) GNSS 測位の概要 GNSS(衛星測位システム)では、人工衛星の位置情報から、地球の重心を原点と する座標上から緯度経度を求め位置を特定する。位置を測定するためには、X,Y,Z, t の 4 つの未知数があるため、4 つ以上の4衛星が必要となる。また、精度確保のため には、伝搬誤差等を差分除去するために、5 つ以上の衛星が必要となる。 ※建設 ICT ざっくりシリーズ[H22. 1](中部地方整備局建設ICT導入研究会)より抜粋 図 1-3 GNSS のイメージ図 4 1 (2) 情報化施工とは GNSS 測位の種類 GNSS 測位 ディファレンシ ャル測位 (D-GNSS) 単独測位 スタティック 測位 相対測位 干渉測位 (位相角観測) キネマティック 測位 RTK-GNSS ネットワーク型 RTK-GNSS 図 1-4 GNSS 測位の種類 単独測位:カーナビゲーションシステムなどで採用されている最も基本的な測位方法。 精度は 10~20m 程度。 相対測位:複数の受信機で 4 個以上の衛星を同時に観測して受信機間の相対的な位置関 係を計測する方法。単独測位より高精度。 ディファレンシャル測位(D-GNSS) :測位対象となる移動局、既知点である固定基地局 で単独測位を行い、誤差を消去する方法。精度は 50cm~5m 程度。 干渉測位:2 台以上の受信機と衛星との距離の差(行路差)を搬送波の位相により求め、 受信機の相対位置を決定する方法。ディファレンシャル測位よりも一般的に精度は高い。 スタティック測位:GNSS を固定して長時間計測する方式。長距離の基線(数 km~ 10km)を精度良く計測できる。精度は 5mm 程度。 キネマティック測量:基準点に 1 台の受信機を固定し、もう 1 台の受信機は移動しなが ら、順次測量を行う方法。1 地点当たり数秒から数分程度の計測が必要。 RTK-GNSS 測位:GNSS 受信機を 1 台は基準局、1 台は移動局として測位する方法。 GNSS(移動局)を移動しながら、リアルタイムに 3 次元座標を測定することが可能。 精度は約 20mm 程度。 ネットワーク型 RTK-GNSS 測位:補正データを国土地理院の電子基準点から求め通信 回線を使い観測する方法。補正情報として仮想基準点方式の VRS と、面補正パラメータ 方式の FKP とある。 5 1 情報化施工とは 1.3. 代表的な情報化施工 国土交通省では、一般化・実用化を推進する情報化施工技術として、施工管理、施工に 関する 5 つの技術を次の通達で明示している。 「情報化施工技術の一般化・実用化の推進について (平成 22 年 8 月 2 日、国官技第 113 号、国総施第 31 号)」 【参照 URL】 http://www.mlit.go.jp/sogoseisaku/kensetsusekou/kondankai/ICTsekou/100802tsutatsu.pdf <施工管理において活用する情報化施工技術> TS による出来形管理 TS/GNSS による締固め管理 <施工において活用する情報化施工技術> MC(モータグレーダ) MC/MG(ブルドーザ) MG(バックホウ) 表 1-1 施工管理において活用する情報化施工技術(2 技術) 技術 イメージ 【TS による出来形管理】 TS で取得した位置を、3 次元の 設計データと比較し、出来形値と 設計値との差分をリアルタイム に算出する。 【TS/GNSS による締固め管理】 TS/GNSS で締固め機械の位置を リアルタイムで取得し、締固め施 工範囲内に設けた平面的な管理 ブロック毎に締固め回数を自動 的にカウントし、表示する。 6 1 表 1-2 施工において活用する情報化施工技術(3 技術) 技術 イメージ 【MC(モータグレーダ)】 TS/GNSS を用いて、排土板の位 置・標高をリアルタイムに取得 し、3次元データとの差分に基づ き、排土板を制御する。 【MC/MG(ブルドーザ)】 TS/GNSS を用いて、排土板の位 置・標高をリアルタイムで取得 し、3次元データとの差分を表示 し、排土板を誘導・制御する。 【MG(バックホウ)】 TS/GNSS を用いて、バケットの 位置・標高をリアルタイムで取得 し、3次元データとの差分を表示 し、バケットを誘導する。 ※図は、情報化施工推進戦略[H20.7.31](情報化施工推進会議)より抜粋 7 情報化施工とは 2 情報化施工(キャリブレーション)の実施フロー 2. 情報化施工(キャリブレーション)の実施フロー 情報化施工(キャリブレーション)の実施フローは、次の通りとする。 準備段階 一般的な情報化施工 の流れ キャリブレーション 関連項目 現地調査に基づく適用確認 現地調査に基づく適用確認 機器・ソフトウェア等 の準備 機器・ソフトウェア等 の準備 使用機器の確認 精度の確認 衛星捕捉状況の確認 (スカイプロット) 基地局の設置 無線影響度確認 ローカライゼーション キャリブレーション 施工計画書の作成・確認 施工計画書の作成・確認 試験施工 施工段階 3 次元設計データ作成 日々の精度確認 ※必要に応じて、キャリブ レーション 情報化施工 検 測 帳票作成・確認 図 2-1 情報化施工(キャリブレーション)の作業フロー 8 3 情報化施工(キャリブレーション)の準備 3. 情報化施工(キャリブレーション)の準備 3.1. 現地調査に基づく適用確認【受注者】 GNSS を利用する現場では、FIX 解を得るために、5 個以上の衛星を捕捉する必要が ある。 GPS のみの場合:5 個以上 GPS+GLONASS の場合:6 個以上(それぞれ 2 個以上)が標準 情報化施工技術の導入可否を判断するため、事前に現地調査を行い、無線通信環境が 確保できるか、FIX 解が得られるかなどを確認する。 計測障害などが懸念される現場では、携帯型の GNSS 等によって、衛星捕捉数などを 確認する。また、衛星捕捉状況を予測するソフト、サービス等(経緯度と日時から理論 上の衛星捕捉数を確認できる)を活用し、当該現場における衛星捕捉状況などを確認す る(詳細については、 「3.3 衛星捕捉状況の確認(スカイプロット) 」参照)。 なお、携帯型の GNSS については、機種によって、GLONASS に対応していないなど 機能が限定されることがあるため、事前に確認しておく必要がある。 ≪現地確認のポイント≫ 周囲に高い建物がないか 急峻な地形のため、上空が遮られていないか 上空を横断する送電線、高いアンテナがないか 空港、基地などの無線通信を行う施設が周辺にないか マルチパスが発生しないか マルチパスとは、衛星からの電波が多重反射(マルチパス)し、GNSS の受信アンテ ナに到達したときに生ずる干渉のこと。衛星からの信号が複数の経路を通り、長い距離 を通る電波は疑似距離が長くなり誤差が増大する。 マルチパスは、周辺の建物、地表からの反射により生じる。 9 3 情報化施工(キャリブレーション)の準備 3.2. 機器・ソフトウェア等の準備【受注者】 GNSS を用いた情報化施工では、基地局、移動局、管理局で設置する機器・ソフトウ ェアを準備する。 表 3-1 局 GNSS を用いた情報化施工の機器構成 名 基準局 移動局 管理局 機器・ソフトウェア GNSS 機器(受信アンテナ、受信機、三脚) 無線送信機(移動局へ補正データを送信) 電源装置 GNSS 機器(受信アンテナ、受信機) 無線受信機(基地局からの補正データを受信) 車載パソコン(モニタ) データ演算処理プログラム パソコン データ演算処理プログラム ※ローカライゼーション用ソフト、3 次元 CAD なども含む カラープリンタ GNSS 信号 GNSS 受信機 車載パソコン (モニタ) GNSS 受信 アンテナ GNSS 受信 アンテナ 基地局-移動局間 無線(補正情報) 移動局 基地局 図 3-1 GNSS の基地局、移動局の関係 10 3 情報化施工(キャリブレーション)の準備 3.3. 衛星捕捉状況の確認(スカイプロット)【受注者】 衛星による測位では、1 日のなかで、衛星捕捉数が多い時間帯、少ない時間帯があるた め、事前準備として、当該現場の衛星補足状況を確認する。 スカイプロットとは、時刻経過に伴う天空の衛星位置変化をプロットした図であり、こ れをもとに衛星の捕捉数、配置状況の良否(PDOP)、高度角などを確認する。 PDOP とは、衛星配置の良否を示す指標であり、4 個の衛星を結んでできる四面体(ピ ラミッド)の体積に反比例し、値が小さいほど精度が高い。値が 1 の場合に最良となる。 ≪スカイプロットの確認のポイント≫ 衛星数が 5 個以上確保できているか ⇒ GPS のみの場合:5 個以上 ⇒ GPS+GLONASS の場合:6 個以上(それぞれ 2 個以上) PDOP 値が 4 以下か 衛生の高度角が低くないか(高度角が低い場合は、周辺の地形、建物によっ て衛星が遮断される可能性がある) 上記で示した衛星数や PDOP 値は一つの目安であり、上記を満足する場合でも、現地 で FIX 解が得られない場合がある。 最終的には、衛星捕捉状況が悪化する時間帯について、現地で FIX 解が得られるかを 確認し、精度が得られない場合は、仕上げ作業、検測等の精度の高い作業は避けるように する。 図 3-2 衛星捕捉状況の悪化(イメージ) 11 3 情報化施工(キャリブレーション)の準備 スカイプロット 衛星数 衛星数が減少 する時間帯が ないか確認 PDOP 値が高 PDOP くないか確認 高度角 高度角が低い 場合、周辺の建 物、地形等の影 響を受ける。一 定高度以上の 衛星数を確認。 図 3-3 スカイプロット、衛星数、PDOP、高度角の予測図の例 12 3 情報化施工(キャリブレーション)の準備 3.4. 基地局の設置【受注者】 基地局は、移動局に対して補正情報を送信するための固定局である。各衛星の誤差を計 算し、移動局に補正情報を送信する。基地局設置に当たっては、測量を実施し、基地局の 位置座標の精度を確保する。 基地局は、GNSS 機器(受信アンテナ、受信機、三脚) 、無線送信機(移動局へ補正デ ータを送信) 、電源装置の機器から構成されるが、設置に当たっては、次に留意する。 ≪基地局設置のポイント≫ 座標が既知であるか 施工中に固定点となるか 電源が確保できるか 上記以外に、信号の送受信などを考慮して、基地局は、事務所の屋根などできるだけ高 い位置に設置することが望ましい。 図 3-4 基準局の設置状況 基地局設置後は、GNSS の信号状況を確認し、衛星捕捉数や PDOP などから、電波状 況が悪化する時間帯がないかを確認する(「3.3 衛星捕捉状況の確認(スカイプロット) 」 参照)。 図 3-5 GNSS の信号データの確認状況 13 3 情報化施工(キャリブレーション)の準備 3.5. 無線影響度確認【受注者】 移動局では、基地局から無線送信される補正情報を受信し、リアルタイムに位置を補正 することで、情報化施工機械を正しく制御できることになる。 基地局、移動局間で無線障害等が発生する場合は、補正情報が移動局で受信できなくな るため、FIX 解が得られず、精度が低下する。 施工現場で発生する無線障害の例として、次がある。 送電線、アンテナの影響 空港、基地などの無線通信を行う施設の影響 隣接工区での GNSS 信号の影響 ※工事車両無線などは、出力ワット数が小さいため、影響はない。 また、基地局-移動局間に障害物(建物、立木など)がある場合、距離が遠い場合など、 無線の受信感度が低下する。携帯型の GNSS を用いて施工現場内を巡回し、衛星からの 信号受信状況、無線影響度などを確認する。 現地条件に左右されるが、一般的に障害物がない見通しの良い現場では、基地局と移動 局間の距離は、無線のワット数にもよるが最大で 2km 程度が限度となる。 なお、免許申請が必要な高出力の無線を利用する場合、無線の届く距離は最大で 5km 程度となる。 GNSS 信号 GNSS 信号 基地局-移動局間 無線(補正情報) GNSS 移動局 図 3-6 GNSS 基地局 基地局、移動局間の無線障害のイメージ 14 3 情報化施工(キャリブレーション)の準備 3.6. 座標変換(ローカライゼーション)【受注者】 GNSS を用いた情報化施工では、その準備作業として、ローカライゼーション、キャリ ブレーション等の作業が必要となる。 ローカライゼーション(座標変換)とは、GNSS 座標系を現場座標系に変換することで ある。米国が構築した GNSS 座標系と現場座標系「日本測地系 2000(JGD2000)」は同 じ世界測地系であるが座標に若干のずれが存在する。また、施工現場で測量誤差を含んだ 現場座標系で示された基準点を正として運用するため、GNSS 座標系を現場座標系に合わ せる必要がある。 また、現場によっては、日本測地系(旧測地系)に基づき作成された測量・設計図面が 利用されている場合があり、測地系の変換が必要となる。測地系の変換については、国土 地理院等が提供しているソフトウェアの利用が可能である。 【参照 URL】http://vldb.gsi.go.jp/sokuchi/tky2jgd/about.html ローカライゼーションには、ジオイド補正等も含まれる。 ジオイド面とは、静止している海水面が地表にも続いていると仮定した面で、それぞれ の地点での高さの基準となる面(重力の等ポテンシャル面)である。ジオイド面は地域に よって異なっているが、これは地球内部を構成している物質による重力で水面の高さが異 なるからである。 一方、GNSS で得られる高さは、WGS-84 系の準拠楕円体面からの高さである。情報 化施工において精度の良い高さデータを利用するためには、GNSS で得られる高さをジオ イド補正して利用する必要がある。 ジオイド補正は、通常、情報化施工で利用するソフトウェア等に付随しており、施工前 に必ず実施する。 引用:国土地理院ホームページ http://vldb.gsi.go.jp/sokuchi/geoid/geoid/geoid.html 図 3-7 ジオイドの概要 15 3 情報化施工(キャリブレーション)の準備 3.7. 施工計画書の作成【受注者】 施工者は、施工計画書に情報化施工で利用する機器・ソフトウェア等の仕様・型番等を 記載する。また、施工者は計測障害等の事前調査結果を報告する。事前確認チェックシー トのイメージを表 3-2に示す。 表 3-2 確認項目 適用条件の確認 計測障害に関する 事前調査 精度の確認 機能の確認 事前確認チェックシートのイメージ(盛土締固めの場合) 確認内容 ① 使用する締固め機械が適用機種(ブルドーザ、タイヤローラ、 振動ローラ及びそれらに準ずる機械)であるか。 ② 使用する材料が締固め回数管理に適しているか。 ① 無線通信障害の発生の可能性はないか。 低い位置に高圧線等の架線がないか、基地・空港等が近くに ないか。 ② GNSS の測位状態に問題はないか。 FIX 解となるのに必要な衛星捕捉数(5 個以上)は確保でき る状況か。 ① GNSS 測量機器が以下の性能を満足しているか。 水平(xy) ±20mm、垂直(z) ±30mm ② 既知座標(工事基準点)と GNSS の計測座標が合致している か。 ① 締固め判定・表示機能 ローラまたは履帯が管理ブロック上を通過する毎に、当該管 理ブロックが1回締固められたと判定し、車載モニタに表示 されるか。 管理ブロック毎の累積の締固め回数が、車載モニタに表示さ れるか。 施工とほぼ同時に締固め回数分布図を画面表示できるか。 ② 施工範囲の分割機能 施工範囲を、所定のサイズの管理ブロックに分割できるか。 ③ 締固め幅設定機能 締固め幅を、使用する重機のローラまたは履帯幅に応じて任 意に設定できるか。 ④ オフセット機能 締固め機械の位置座標取得箇所と実際の締固め位置との関係 をオフセットできるか。 ⑤ システムの起動とデータ取得機能 データの取得・非取得を施工中、適宜切り替えることができ るか。 振動ローラの場合は、有振時のみの位置座標を取得するよう になっているか。 ⑥ 座標取得データの選択機能 FIX 解でのデータのみを取得する機能を有しているか。 16 確認結果 3 情報化施工(キャリブレーション)の準備 3.8. 施工計画書の確認【発注者】 監督職員は、施工計画書、計測障害等の事前調査結果等を確認し、施工現場において適 切な精度を保つことができるか確認する。 ≪施工計画書の確認のポイント≫ 情報化施工で利用する機器・ソフトウェア等の確認 適切な精度が確保できるか 17 4 施工現場におけるキャリブレーション方法 4. 施工現場におけるキャリブレーション方法 4.1. キャリブレーション【受注者】 情報化施工機械では、GNSS アンテナ、チルトセンサなどの位置を計測し、必要に応じ て補正・調整等(キャリブレーション)を行う必要がある。 キャリブレーションには、情報化施工機器導入時に実施する機器、センサ、ソフトウェ ア等を補正・調整する作業、日々の GNSS アンテナ、チルトセンサなどの位置などの確 認において補正が必要な場合に再調整を行う 2 つの作業が含まれる。 (1) 情報化施工機器導入時のキャリブレーション 機器の調達方法などによって異なるが、情報化施工機器導入時においては、GNSS、 チルトセンサ等の取り付け、取り付け寸法の計測、ソフトウェアの設定、精度確認等 のキャリブレーション作業が必要となる。 GNSS の計測誤差については、現場ごとに異なるため、各現場で機器調整等のキャ リブレーション作業が必要となる。 施工機械の種類などによっても異なるが、機器導入時のキャリブレーション作業は、 2、3 人で 2~4 日程度の期間を要する。 (2) 日々の精度確認(※必要に応じてキャリブレーションを実施) 日々の使用による機器等への誤差の累積や、衛星状況が日によって変化することか ら、情報化施工機器の日々の精度確認が必要となる。 バックホウにおける日々の精度確認は、毎日施工前に、バケットの刃先を既知点に 合わせて、車載器パソコンで座標を読み取り、既知点座標とのずれを確認する。 図 4-1 座標の計測状況(日々の精度確認) 18 4 施工現場におけるキャリブレーション方法 GNSS の座標は衛星配置状況で座標にずれが生じるため、前日に計測した座標値が、 翌日も同様に計測されるとは限らない。 水平(xy) ±20mm、垂直(z) ±30mm 以上の誤差が確認された場合、施工性(多 少のずれであればオペレータが留意しながら作業等も可能)や出来形管理で求められ る精度確保等を勘案し、必要に応じて補正・調整等(キャリブレーション)を実施す る。 ≪キャリブレーションの実施のポイント≫ キャリブレーションには多大な時間を要するため、代替作業(丁 張りによる施工)、作業工程等を含めてキャリブレーション実施 の判断が必要 キャリブレーションは、衛星捕捉状況が良好な時に実施する。 バケットの刃先を既知点に合わせて、水平・垂直のゼロセットを 行うことで簡単に位置の調整ができるが、絶対に実施してはいけ ない。当該地点でのみずれが補正され、他の位置でのずれが補正 されるわけではない 一般的なキャリブレーションとして、機器等に蓄積したたるみな どを補正するため、取り付け寸法の再計測が実施される (3) 施工時の計測障害時の対応 FIX 解が得られないなど、施工時に計測障害が発生した場合、次のような確認・対 応を行う。 固定局の電源等の確認(燃料切れなどがないか) 上空の視通の確認(特に南側の視通が確保されているか) システムの再起動(システムを再起動した場合、値が落ち着くのに時間がかか る場合があるため注意が必要) 上記の確認・対応を行っても、FIX 解が得られない場合は、作業を中止して精度回 復を待つ必要がある。 19 4 施工現場におけるキャリブレーション方法 4.2. キャリブレーション確認【受注者・発注者】 監督職員は、施工者が日々、実施する精度確認の結果を確認し、施工上問題ない範囲で 精度が確保されているかを確認する。 ≪精度確認結果の確認のポイント≫ 毎朝施工前に確認する既知点座標との誤差が、水平(xy) ±20mm、 垂直(z) ±30mm 以内か※ FIX 解が得られない時間帯に作業を実施していないか ※水平 (xy)、垂直(z)の数値は目安とする。 ※垂直(z)方向に関しては、誤差が生じやすい。 20 5 その他 5. その他 5.1. 情報化施工における施工管理、監督・検査要領 情報化施工における施工管理、監督・検査要領は、次を参考とする。 TS を用いた出来形管理要領(土工編) 平成 24 年 3 月【国土交通省】 TS を用いた出来形管理の監督・検査要領(河川土工編) 平成 24 年 3 月【国土交通省】 TS を用いた出来形管理の監督・検査要領(道路土工編) 平成 24 年 3 月【国土交通省】 TS を用いた出来形管理要領(舗装工事編) 平成 24 年 3 月【国土交通省】 TS を用いた出来形管理の監督・検査要領(舗装工事編) 平成 24 年 3 月【国土交通省】 TS・GNSS を用いた盛土の締固め管理要領 平成 24 年 3 月【国土交通省】 TS・GNSS を用いた盛土の締固め管理の監督・検査要領 平成 24 年 3 月【国土交通省】 参照 URL:http://www.mlit.go.jp/sogoseisaku/constplan/sosei_constplan_tk_000017.html 21 5 その他 5.2. 用語集 情報化施工(キャリブレーション)における用語は、次を参考とする。 用 語 TS(トータルステーション) GNSS(衛星測位システム) レーザスキャナ RTK 測位(リアルタイムキネマテ ィック) 衛星数 FIX 解 FLOAT 解 DOP(dilution of precision) PDOP 解 説 距離を測る光波測距儀と角度を測るセオドライトを組み合わ せて同時に測量できる機器。自動追尾型、遠隔操作による計 測可能な機種など、いくつか種類がある。 人工衛星からの信号を利用して、地球上における現在位置を 測定するためのシステム。 GPS はアメリカが運用している測位システムであり、他にヨ ーロッパの GALILEO、ロシアの GLONASS などがある。 計測点とセンサの間をレーザパルスが往復する時間から距離 を計測し、同時にレーザを発射した方向を計測することで、 計測点の 3 次元座標を取得する。短時間で広範囲を計測でき ることが特徴として挙げられる。 2 台の GNSS 受信機を使用して測位し、1 台は基準局、1 台は 移動局となる。 GNSS(移動局)を移動しながら、リアルタイムに 3 次元座 標を測定することが可能であり、精度も高い(精度は約 20mm 程度)。 GNSS において受信可能な衛星の個数。 RTK 測位において、搬送波の波数が整数値で算出された解。 RTK 測位では、波数の整数値の収束解を得るのに時間がかか るが、解が決定されれば約 2cm 程度の位置精度を得る。 RTK 測位において、搬送波の波数が実数値で算出された解。 整数値の収束解が得られない場合 FLOAT 解となり、位置精 度は約 20cm であり、施工に必要な精度を担保できない。 衛星配置による精度低下率を表す。DOP は数値が大きくなる ほど、測位誤差が大きくなる。DOP には、次の種類がある。 GDOP(geometrical dilution of precision):幾何学的精度低下 率 HDOP(horizontal dilution of precision):水平精度低下率 VDOP(vertical dilution of precision):垂直精度低下率 PDOP(position dilution of precision):位置精度低下率 TDOP(time dilution of precision):時刻精度低下率 衛星配置の良否を示す指標。4 つの衛星を結んでできる四面 体の体積に対し逆相関になる。値が小さいほど配置が良いと 判断される。衛星数が多くても衛星配置が悪い場合、測位精 度が低下する。特に高さの変動が大きくなり、PDOP が 10 になると、±10cm 程度の変動となることがある。 衛星が 5 個以上の場合は、最適な 4 つの衛星がシステムで自 動選択される。次の関係式が成り立つ。 PDOP2=HDOP2(水平)+VDOP2(垂直) GDOP GDOP は、3 次元位置に加えて時間を含めた精度指標となる。 次の関係式が成り立つ。 GDOP=PDOP2+TDOP2 【参照 URL】用語集で参考となる URL は、下記のとおりである。 22 5 用 語 WGS-84(World Geodetic System 1984) その他 解 説 地球中心を原点とする全世界的な測地座標系。1984 年に発表 された座標系であり、GNSS 衛星の軌道情報は、この座標系 に基づくものとなる。 搬送波 電波を用いて情報を伝達するときのもととなる高周波。 L1(Link1) 衛星のデータを放送するために GPS 衛星によって使用され る 1 番目の L バンド周波数。周波数は 1575.42Mhz。 L2(Link2) 衛星のデータを放送するために GPS 衛星によって使用され る 2 番目の L バンド周波数。周波数は 1227.6Mhz。 NMEA NMEA フォーマットとは、National Marine Electronics Association(米国会用電子協会)が規定した GNSS 受信機な どの通信を規定したプロトコル。 電子基準点 国土地理院が GPS で常時観測している基準点で、全国に約 1200 点設置している。この点は、地殻変動の監視、各種測量 の基準点として利用されている。 VRS ネットワーク型 RTK-GNSS 測量の方式の一つ。VRS 方式と は、仮想基準点方式と呼ばれ、複数の電子基準点の観測デー タから、測量現場のごく近傍に仮想の基準点を設定し測位す る。 FKP ネットワーク型 RTK-GNSS 測量の方式の一つ。FKP 方式と は、最寄りの基準局と移動局とで干渉測位を行いこれに面補 正パラメータを加え移動局の位置を決定する方式をいう。 座標系 地球上のある点の位置を統一的に数値で表すための系。 測地座標系(経度緯度で表す)、平面直角座標系などがある。 測地系 測地系には、日本測地系、世界測地系(日本測地系 2000)が ある。日本測地系は、平成 14 年の改正測量法の施行前に利用 されていた測地系であり、旧測地系とも呼ばれる。 世界測地系は世界で共通に利用できる基準であり、日本では、 平成 14 年以降、日本測地系 2000(新測地系ともいう)が利 用されている。 ローカライゼーション GNSS 座標系を現場座標系に変換すること。 ジオイド 平均海水面を陸地にまで延長したと仮定した場合に全地球を 覆う仮想的な海面のこと。 マルチパス GNSS 信号が別の経路を通ってアンテナに到達した時に生ず る干渉。長い経路を通る信号は擬似距離が長くなり、誤差が 増大する。アンテナの近くの地表や建物からの反射により複 数の経路(マルチパス)が生じる。 チルトセンサ 建設機械のモニタに使われる傾斜センサ。バックホウのブー ムやアームなどに取り付けて、GNSS とチルトセンサの計測 値からバケットの先端部分の座標を計算している。 MC(マシンコントロール) TIN などによる 3 次元の設計データに基づき、リアルタイム に計測した位置情報と設計値との差分を計算し、排土版の高 さなどを自動制御するシステムの総称。 MG(マシンガイダンス) 建設機械の車載モニタを通じてバケット等の位置、設計値と の差分などを提供し、オペレータを支援するシステムの総称。 http://www.cbr.mlit.go.jp/kensetsu-ict/ict-zakkuri.html http://vldb.gsi.go.jp/sokuchi/geoid/ http://terras.gsi.go.jp/gps/gps-based_control_station.html 23 5 その他 Q&A 情報化施工(キャリブレーション)における主な質問と回答は、次を参考とする。 質 問 TS と GNSS では、どちら のシステムを選択した方 がよいのか。 GLONASS 衛星を利用す るメリットは何か。 情 報 化 施 工 で は 、 RTKGNSS 以外に、ネットワー ク型 RTK-GNSS の方法を 採用することが可能か。 発注者から受領した図面 が旧測地系で作成されて いる場合、どのように取り 扱うのか。 測量機器を建設機械に設 置した場合、機械の振動等 の影響を受けないのか。 回 答 TS は TS 出来形管理だけでなく、自動追尾型の TS であれば、MC/MG でも利用できる。TS 1 台に対し、建設機械 1 台が対応するため、複 数の建設機械で同時施工する場合、 TS も複数台設置する必要がある。 一方、GNSS の場合、基地局 1 つに対して、複数の建設機械(移動 局)を配置することが可能である。 TS は視通を確保する必要があり、天候や時間(夜間など)によって 使用できなくなる。 GPS 衛星だけでは測位精度の確保が困難な場合でも GLONASS 衛 星の併用により改善が見込まれる場合がある。 北海道の場合、緯度が高いため GPS 衛星の高度角が低くなるが、 GLONASS 衛星の併用によって測位精度向上が見込まれる可能性が ある。 ネットワーク型 RTK-GNSS では、基地局の設置が不要なため、 RTK-GNSS に比べて、コスト的なメリットが大きい。一方で、 RTK-GNSS に対して測位精度が劣化するため注意が必要である。 一般的に、測位精度が要求される MC/MG などは RTK-GNSS の採 用が望ましいが、GNSS による締固め管理など相対的に低い精度で も構わない情報化施工についてはネットワーク型 RTK-GNSS の採 用も可能である。 現場で利用する座標は、一つの座標系(現場座標系)に統一する必 要がある。旧測地系の座標は、必要に応じて新測地系に変換する必 要があり、変換に当たっては、国土地理院等が提供しているソフト ウェアの利用が可能である。 【参照 URL】http://vldb.gsi.go.jp/sokuchi/tky2jgd/about.html 1Hz 程度の周波数でデータを取得する場合(1 秒間に 1 回データを 計測)、振動の影響はあまり認められない。 5Hz、10Hz など、細かな計測を行う場合は、振動等の影響を受ける 可能性があり、データ解析に当たって留意する必要がある。 24
© Copyright 2026 Paperzz