広帯域性を備えた
空気圧駆動型触覚ディスプレイ
橋本
悠希
電気通信大学 大学院 電気通信学研究科
博士(工学)の学位申請論文
2010 年 3 月
広帯域性を備えた
空気圧駆動型触覚ディスプレイ
博士論文審査委員会
主査
梶本
裕之
准教授
委員
中嶋
信生
教授
委員
高橋
裕樹
准教授
委員
下条
誠
教授
委員
長谷川
晶一
准教授
著作権所有者
橋本
悠希
2010
Air Pressure based Tactile Display with Wide Frequency Bandwidth
Yuki Hashimoto
Abstract
Looking at the visual and audio displays that are currently prevalent, the majority of the contents
are not for the display of literal information, nor for remote collaboration. In a word, the majority of
the content is intended for “emotional contents” such as music and cinema. In case of haptic field,
many projects have been trying to develop tactile devices to present “literal” information such as
Braille. Although Braille displays for the visually impaired is an indispensable topic, we should also
seek ways for tactile displays to be used in daily life by everybody.
We decided that one possible way is “emotional tactile contents” such as visual and audio field. In
fact, the research of trying to present emotional feeling, appealing to our feelings and passions, by
tactile information has increased recently. However, the range of expressions was limited because
they used conventional motor-based haptic displays. In a word, the quality of haptic sensation of the
current displays is still insufficient, and the system is too bulky.
This research focused on a frequency band width to improve a quality of tactile feeling, and
proposed a new tactile display. The display is composed of one or two speakers. Users hold the
speakers between their hands while the speakers vibrate air between the speakers and their palms.
The user feels suction and pushing sensations on their palms from the air pressure. This paper
describes a detail of our tactile display and also explains five implementations of tactile contents by
using our display to show ability of expression of our display and possibility of tactile contents.
広帯域性を備えた空気圧駆動型触覚ディスプレイ
橋本
悠希
概要
近年,半導体技術の大きな発達により高品位な視覚・聴覚コンテンツが手軽に手に入る
ようになった.他方,触覚の分野では,盲人向けの福祉用途として文字や形などの記号的
な情報を触覚で提示する研究が古くから行われており,既に商品化もなされるなど大きな
発展を見せている.しかしこれらの応用は,視覚や聴覚を用いて記号的情報を十分に取得
可能な一般人にとって必ずしも必要とは言えない.より多くの人々にとって有効な触覚情
報とは,記号的な情報以外,触覚のみが持つ独自の表現の提示であると考えられる.実際,
近年コンピュータゲームの分野では振動子や空気圧を用いた触覚提示が実用化されており,
補助的ではあるが確かにゲームへの没入感を高める効果が認められる.また,リアルな質
感の提示を行う研究も多数存在し,装置や条件の制約はあるものの,実物と似通った感覚
を提示することを実現している.さらに最近では感性情報を触覚提示によって伝達すると
いう試みが活発になっており,近い将来,映像や音楽のように自然に触覚を楽しむという
環境が構築されることを予感させる.しかしながら従来の触覚提示手法を用いる場合,ポ
ータブルな触覚提示装置では比較的卖純な刺激パタンしか提示できないために表現の制約
が存在し,大型の触覚提示装置では装置が複雑化してしまい,将来的な普及が見込めない
という問題を抱えている.また,提示すべきコンテンツが未成熟で,触覚が主役となる「キ
ラーコンテンツ」は未だその姿が見えない.
この問題に対して本論文では,触知覚の時間応筓性に着目し,簡便な構造でありながら
複雑な触覚表現を可能とする新たな触覚ディスプレイの提案を行う.また,本提案手法を
用いた触覚コンテンツを提案・実装することで,本提案手法の有効性を示すと共に触覚表
現の拡張を行う.これら2点の試みにより,触覚における触覚コンテンツ技術が大きく発
展することが期待される.
本論文は 10 章から構成され,内容の要旨は以下の通りである.
第1章 序論
触覚研究における神経心理学,触覚提示技術双方の歴史をまとめ,コンテンツにおける
感性情報の重要性を述べる.その後,本論文の目的を感性触覚コンテンツ技術の発展と定
め,アプローチ方法について述べる.
第2章 Hi-Fi 触覚ディスプレイ
本論文が対象とする人間の触覚に関して用語の定義と触知覚の構造及び働きの概説する.
また,これまでの皮膚触覚ディスプレイを空間応筓性,時間応筓性の軸に分けてそれぞれ
概観し,本論文が目指す触覚ディスプレイの条件を明確にする.その後,条件を満たす触
覚提示手法を提案し,実装及び性能評価を行う.
第 3 章から第 9 章では,第 2 章で提案した触覚提示手法を用いて 5 つの触覚コンテンツ
を提案し,その効果を検証する.
第3章 触覚コンテンツ群の提案
触覚コンテンツを考える際に重要な触知覚特性を示し,その特性に沿い「動的・静的」
「受
動・能動」をそれぞれ軸とする触知マップを作成する.その後,マップの各領域に当ては
まり且つ感性情報を富に含むと思われる感性触覚コンテンツ群を示す.
第4章 触覚コンテンツ1:
生物感
「動的・受動」領域として生物特有の触感覚に着目し,最も「生物」を感じさせる生物
的な触感覚である鼓動運動及び呼吸運動のリアルな提示を行う.まず,鼓動と呼吸の合成
振動の最適化を行い,最も自然な生物感を生じる最適な合成方法及び合成比率を求める.
また,広範囲な触覚的な生物表現として「想起させる生物の大きさ・印象の制御」が可能
であることを示す.最後に実演展示によって一般的な有効性を実証する.
第5章 触覚コンテンツ2:
Skin to Skin
「動的・能動」領域としてスキンシップに着目し,対人触覚コミュニケーションにおけ
る理想的な環境として皮膚同士が触れあう状況「Skin-to-Skin」を提唱すると共に本手法に
よる実現を試みる.まず,プロトタイプを製作し,手で行う複数のジェスチャについて識
別可能な触覚提示を実現する.次に,実演展示によって一般的な有効性を実証する.
第6章 触覚コンテンツ3:
粘着性粘弾性感
「静的・能動」領域として物理現象の再現に着目し,その中でも「心地よさ」と「気持
ち悪さ」が共存する特殊な素材である粘着性粘弾性体(スライム)を取り上げる.従来,粘着
感と粘弾性感は皮膚感覚ディスプレイ,力覚ディスプレイで別々に再現されてきたが,本
提案手法ではその両方の感覚提示を実現する.まず,実物の粘着性粘弾性体の挙動を実際
に測定し,そのデータを元にリアリティの高い感覚を実装する.また,実演展示によって
一般的な有効性を実証する.
第7章 触覚コンテンツ4:
吸飲感覚
「静的・能動」領域として我々の生活にとって欠かせない「食」を取り上げ,その中で
も食品を「飲む」感覚である吸飲感覚の再現を行う.吸飲感覚の要素を「空気圧」「振動」
「音」と定義し,それぞれの要素を記録・再生することで再現する手法を用いて実装を行
うと共に,実験による再現性を確認と規模な実演展示によって有効性を実証する.
第8章 触覚コンテンツ5:
触覚のスロー再生
「無生物・受動」領域として,映像におけるスロー再生効果に着目し,触覚にも適用す
ることを試みる.触覚再生の対象としては物体と平板の衝突振動を選び,高いサンプリン
グレートで記録した振動情報を任意の倍率で再生するという手法を用いる.本手法を用い
たシステムを実装し,触覚によるスロー再生が映像と同様の感動効果と判別能力向上効果
をもたらすことを確認する.
第9章 触覚コンテンツ総括
第 3 章から第 9 章で提案及び実装した触覚コンテンツの成果をまとめ,本手法によって
多彩な触覚表現が可能であることを結論づけると共に,今後の触覚コンテンツの在り方を
示す.
第 10 章
結論
本論文の成果,結論をまとめ,今後の課題,展望について述べる.
目次
第1章
序論 ........................................................................................................................ 1
1.1
神経心理学における触覚研究の歴史................................................................... 2
1.2
触覚提示技術の歴史 ............................................................................................. 3
1.3
コンテンツにおける感性情報の重要性 ............................................................... 6
1.4
本論文の目的 ......................................................................................................... 7
1.5
本論文の構成 ......................................................................................................... 7
第2章
Hi-Fi 触覚ディスプレイ ....................................................................................... 9
2.1
皮膚触覚受容器の構造と働き .............................................................................. 9
2.1.1
皮膚構造.....................................................................................................................10
2.1.2
触覚の空間特性......................................................................................................... 11
2.1.2.1
各受容器の受容野............................................................................................. 11
2.1.2.2
触覚の空間分解能.............................................................................................12
2.1.2.3
触覚の感度.........................................................................................................14
2.1.3
2.2
受容器の時間特性.....................................................................................................14
従来の触覚ディスプレイ .................................................................................... 16
2.2.1
空間分解能の高い触覚ディスプレイ .....................................................................17
2.2.2
広い周波数帯域を持つ触覚ディスプレイ .............................................................18
2.3
本論文で目指す触覚ディスプレイ..................................................................... 21
2.3.1
感性触覚コンテンツの提示に適する触覚ディスプレイの条件 .........................21
2.3.2
触覚ディスプレイの設計.........................................................................................23
2.4
提案手法............................................................................................................... 24
2.5
評価実験............................................................................................................... 26
2.5.1
実験装置.....................................................................................................................26
2.5.2
実験内容.....................................................................................................................27
2.5.3
実験結果.....................................................................................................................28
2.6
実装 ...................................................................................................................... 28
2.7
空気漏れ問題 ....................................................................................................... 30
2.7.1
薄膜による密閉.........................................................................................................30
2.7.2
アタッチメントによる開口径の変更 .....................................................................31
2.8
波形の再現性 ....................................................................................................... 32
i
2.8.1
金属板で覆った場合.................................................................................................32
2.8.2
手掌部で覆った場合.................................................................................................35
2.9
まとめ .................................................................................................................. 37
第3章
触覚コンテンツ群の提案.................................................................................... 39
3.1
触知覚特性の分類 ............................................................................................... 39
3.2
提案する触覚コンテンツ群 ................................................................................ 40
第4章
触覚コンテンツ 1: 生物感 ............................................................................... 42
4.1
目的 ...................................................................................................................... 42
4.2
生物感 .................................................................................................................. 43
4.3
本手法の導入 ....................................................................................................... 44
4.4
提示波形の最適化 ............................................................................................... 47
4.4.1
実験装置.....................................................................................................................47
4.4.2
実験 1:合成波形の選定..........................................................................................48
4.4.3
実験 2:合成比率の最適化......................................................................................52
4.5
生物感の拡張 ....................................................................................................... 54
4.5.1
実験 1:生物の大きさ知覚制御 ..............................................................................55
4.5.2
実験 2:生物の印象制御..........................................................................................57
4.6
実演展示............................................................................................................... 61
4.6.1
プロトタイプ.............................................................................................................61
4.6.2
提示波形とインタラクション.................................................................................62
4.6.3
展示結果.....................................................................................................................64
4.7
まとめ .................................................................................................................. 65
第5章
触覚コンテンツ 2: Skin to Skin ...................................................................... 67
5.1
目的 ...................................................................................................................... 67
5.2
本手法の導入 ....................................................................................................... 68
5.2.1
スキンシップで生じる波形の計測実験 .................................................................69
5.2.2
プロトタイプ.............................................................................................................71
5.2.3
提示波形とインタラクション.................................................................................73
5.2.4
展示結果.....................................................................................................................73
5.3
まとめ .................................................................................................................. 75
ii
第6章
触覚コンテンツ 3: 粘着性粘弾性感................................................................ 77
6.1
目的 ...................................................................................................................... 77
6.2
粘着性年弾性体とのインタラクション ............................................................. 79
6.3
本提案手法の導入 ............................................................................................... 81
6.3.1
現象の確認.................................................................................................................81
6.3.2
設計.............................................................................................................................83
6.3.3
プロトタイプ.............................................................................................................83
6.3.4
展示.............................................................................................................................87
6.4
まとめ .................................................................................................................. 89
第7章
触覚コンテンツ 4: 吸飲感覚 ........................................................................... 91
7.1
目的 ...................................................................................................................... 91
7.2
「飲む」行為とストロー .................................................................................... 92
7.3
吸飲感覚............................................................................................................... 93
7.4
実装 ...................................................................................................................... 94
7.4.1
記録手法.....................................................................................................................94
7.4.2
記録.............................................................................................................................95
7.4.2.1
記録手順.............................................................................................................95
7.4.2.2
記録した食品群.................................................................................................96
7.4.2.3
記録したデータ.................................................................................................97
7.4.3
実装...........................................................................................................................100
7.4.3.1
設計指針...........................................................................................................100
7.4.3.2
再生装置...........................................................................................................100
7.4.4
制御手法...................................................................................................................103
7.4.4.1
空気圧...............................................................................................................103
7.4.4.2
振動・音声.......................................................................................................104
7.4.5
評価実験...................................................................................................................104
7.4.6
展示...........................................................................................................................106
7.4.6.1
展示システム...................................................................................................106
7.4.6.2
展示結果........................................................................................................... 111
7.4.7
食品の判別実験....................................................................................................... 112
7.4.7.1
実験内容........................................................................................................... 112
7.4.7.2
実験結果........................................................................................................... 113
7.5
Hi-Fi 触覚提示の導入 ........................................................................................ 113
7.5.1
従来型 SUI の問題点 .............................................................................................. 113
7.5.2
設計........................................................................................................................... 114
iii
7.5.3
製作........................................................................................................................... 115
7.5.4
再現性の確認........................................................................................................... 119
7.5.5
動的な吸飲力への対応...........................................................................................120
7.5.5.1
対応が必要な要素...........................................................................................120
7.5.5.2
手法...................................................................................................................120
7.5.5.3
実験内容...........................................................................................................122
7.5.5.4
実機への導入...................................................................................................123
7.6
まとめ ................................................................................................................ 124
第8章
触覚コンテンツ 5: 触覚のスロー再生 .......................................................... 126
8.1
目的 .................................................................................................................... 126
8.2
スロー効果の要因 ............................................................................................. 127
8.3
本提案手法の利点 ............................................................................................. 127
8.4
触覚におけるスロー再生効果の検証............................................................... 128
8.4.1
記録システム...........................................................................................................128
8.4.2
記録内容...................................................................................................................130
8.4.3
提示システム...........................................................................................................131
8.4.4
展示...........................................................................................................................133
8.5
触覚のスロー再生における物体の判別特性 ................................................... 135
8.5.1
記録システム...........................................................................................................135
8.5.2
提示システム...........................................................................................................136
8.5.3
判別実験...................................................................................................................138
8.5.3.1
サンプル...........................................................................................................138
8.5.3.2
実験方法...........................................................................................................138
8.5.3.3
実験結果...........................................................................................................140
8.6
まとめ ................................................................................................................ 144
第9章
触覚コンテンツ総括 ......................................................................................... 146
9.1
提案した触覚コンテンツ群からみる触覚表現の可能性 ................................ 146
9.2
感性触覚コンテンツにおける本提案手法の価値............................................ 148
第 10 章
結論 .................................................................................................................... 150
10.1
第一の目的:感性表現が可能な触覚提示技術の確立 .................................... 150
10.2
第二の目的:触覚コンテンツ群の提案・実装 ............................................... 151
10.3
結言 .................................................................................................................... 152
iv
10.4
今後の課題......................................................................................................... 153
謝辞 ..................................................................................................................................... 155
関連発表 .............................................................................................................................. 156
参考文献 .............................................................................................................................. 160
v
第1章
序論
いったいこれは何なのであろうか.継ぎ目のない体全体の靴下.
約2ヤード平方の我々自身の入れ物,我々の顔.
四六時中開いていたり閉じたりし,青白くなったり,汗をかき,輝き,光り,
溝ができたり,震えたりする.この器官の持ち主を中に含んで.
敏感な検知器であり,外の世界への冒険者でもある.一体なんであろうか.
アメリカの作家 Richard Selzer は,触覚の特異性をこのように表現した[1].触覚への驚き
を露わにしたこの文章の通り,我々の全身に張り巡らされたこの器官は,膨大な情報を四
六時中我々に伝達し,日々の暮らしを支えている.Selzer はまた,触覚を冒険者と記してい
る.人間の行動に合わせてこの器官も絶えず追随し,常に行動の中心にあるからだ.鋭敏
な検知器でありつつ冒険者.まさに生物そのものである.この生物は,汗をかき,震え,
鳥肌が立つことで感情までをも表現する.検知器であり冒険者であり表現者.もはや一個
の知的生命体とも思える挙動を示すこの器官は,心を司る脳にも例えられる.脳生理学の
間では,触覚が重要な役割を担っている手を「外に飛び出した,第二の脳」と位置づけて
おり[2],ガーション博士は同じく五感の中で触覚のみが存在する消化器を「第二の脳」と
主張している[3].また近年,傳田らは触覚自体を第三の脳であると宣言する著書を発表し
た[4].
触覚を脳と捉えるにあたっては,いくつか根拠がある.まず,発生学的に脳と皮膚の起
源が同じことである.皮膚と脳はどちらも外胚葉から形成されることが解明されている[4].
また,構造が同じである.脳も皮膚も大きな面積を有しており,どちらもカラム構造を持
つことが判明している[5].次に機能について比較する.脳は「感じる→考える→行動する
指示を出す」という機能を備えた情報処理システムの臓器と言える[4].では触覚はどうな
のか.Hart らは頭部を切り取ってしまった脊髄だけの無脳カエルを用いて背中に酸の刺激
を与える実験を行った.その結果,驚くべきことにこのカエルは刺激点を正確に「痒そう」
1
に掻くという動作を行った[6].また Grubauer らは,皮膚が自身の状態を常にチェックし,
ダメージを受けると自動的に修復していることを突き止めた[7].これらの事実から皮膚で
も独自の情報処理システムが存在していることが伺い知れ,皮膚≒脳という考えも頷ける.
であるならば,脳は心を司る器官なのだから,必然的に皮膚もヒトの心に大きな影響を及
ぼす器官だと言える.このように,触覚の捉え方は現在大きく変貌しつつあり,触覚を巡
る議論は卖なる検知器であることを超えて感性レベルにまで広がろうとしている.
触覚器官に関するこのような潮流に合わせるように,文字やシンボルといった記号的な
情報以外,つまり触覚のみが持つ知覚の提示を追求する研究が近年増加している.リアル
な質感の提示を行う研究では,装置や条件の制約はあるものの実物と似通った感覚を提示
することを実現している[18][19][20].さらには,触覚コミュニケーションに代表されるよ
うな感性情報伝達の試み[21][22]が活発になっており,近い将来,映像や音楽のように自然
に触覚を楽しむという環境が構築されることを予感させる.しかしながら従来の触覚提示
手法を用いる場合,ポータブルな触覚提示装置では比較的卖純な刺激パタンしか提示でき
ないために表現の制約が存在し,大型の触覚提示装置では装置が複雑化してしまい,将来
的な普及が見込めないという問題を抱えている.また,提示すべきコンテンツが未成熟で,
触覚が主役となる「キラーコンテンツ」は未だその姿が見えない.
本論文は,上記の問題を解決し,未だ未成熟な触覚コンテンツ技術の発展を推し進める
ものである.本論文の柱は 2 本存在する.第一に,繊細な表現が可能な触覚ディスプレイ
技術の確立である.本論文では,時間特性に着目した触覚提示手法を提案・実装する.何
故ならば,触覚それ自体の質的向上を図る上では空間方向よりも時間特性がより重要だと
考えられ,それにも関わらず時間特性に関する議論は未発達な部分が多いためである.第
二に,本触覚提示手法を用いた触覚コンテンツの提案である.本論文では,触知覚特性か
ら製作した触知マップを網羅する触覚コンテンツ群を提案・実装する.これらの結果から
本提案手法を用いたディスプレイの有効性を立証し,触覚表現の可能性と本提案手法の本
質を見出すと共に,触覚コンテンツ研究が進むべき方向を示す.
1.1 神経心理学における触覚研究の歴史
2400 年以上前のアリストテレスの時代,触覚は既に五感の1つとして定義され,ハペー
と呼ばれていた.この言葉は,ハプトー(hapto:結ぶ,火を接触させる),ハプトマイ(haptomai:
自らを~につなぐ,触れる)の動詞語幹から作られた名詞である.また,形容詞のハプトク
ス(hapticos)は,現在用いられている haptic(触れる)の語源となっている[23].このように,
触覚研究は 2400 年以上の長い歴史を持つ.しかしながら触覚としての定義はあいまいで,
皮膚にある感覚という意味で長く用いられていた.何故ならば,皮膚は質感,圧力,熱さ,
冷たさなど多くの感覚を複合して知覚しているため複雑で,受容する仕組みがなかなか解
明されなかったためである.
2
その後,本格的な研究が行われるようになったのは 19 世紀の Weber からであった.Weber
は触覚を皮膚の受容器の働きのみによるものと定義し,重さの識別,圧の識別,温度の識
別,刺激場所の定位など定量的な触覚の能力測定を数多く行った[24].その後,皮膚感覚に
は痛点,触点,温点,冷点がそれぞれ独立に存在することが解剖学的に発見され,さらに
は触点の中にも種類があるという仮説が F.Vater-Pacini, G.Messner, F.Merkel, A.Ruffini らによ
って発表されるなど,皮膚感覚の要素的,分析的な研究は大きな飛躍を見せていった.な
お,今日の各触覚受容器には彼らの名前が用いられている.
要素的,分析的な研究では,皮膚に対して刺激を行う受動触での実験が主流であり,こ
の傾向は現在でも続いている.しかし,20 世紀に入るとこのような研究手法に異を唱える
研究者が現れた.Katz である.彼は,受け身型の触覚刺激は日常生活ではほぼ発生しない
ことから能動的に触れる動作に焦点を当て,粗さ知覚において表面を能動的に触れたとき
の弁別がよりよいことを示すなどアクティブタッチの重要性を指摘した[25].その後,
J.J.Gibson が形の知覚において動きが重要であることを指摘し,皮膚の受容器のみではなく
関節や筋に存在する受容器を含む複合的な知覚系であるハプティク系を提案した[26][27].
アクティブタッチの研究はその複雑さから従来の分析的な手法が使えず,多くの触覚研究
者に敬遠された.その一方で,受動触と能動触の違いや,形状や表面性状がアクティブタ
ッチによって具体的にどう集められるかなどの新たな研究が増加していった.
現在では,触覚の工学的応用を目的としたアクティブタッチに関する研究が大幅に増加
し[8][9][10],主流は受動触から能動触へ移った感がある.また,内臓感覚や脳との関連に
まで研究対象が広がるなど,一度は狭められた触覚の定義がまた広がりを見せている.視
覚,聴覚など他の感覚との関連させたクロスモーダル[11][12][13],マルチモーダル研究
[14][15][16]も台頭しており,触覚を含めた複合的な刺激とその認知に関する研究が盛んに
なっている.さらには「どう感じるか」という感情と触覚の関連に関する関心も高まって
いる.このような流れから,今後はより複雑な各感覚との絡み合いを扱い,
「意識」や「心」
の解明につなげていくものと思われる.
1.2 触覚提示技術の歴史
触覚提示に関する技術は触覚の要素的,分析的な研究と共に発展してきた.しかしなが
ら,その多くはあくまで実験用の装置という位置づけであり,一般への普及を目指した例
は尐なく,本格的な実用化研究は 1960 年代後半まで待たねばならない.また,触覚は広大
な面積と複数の受容器の複合的な知覚という複雑さを持つため,未だ完全な触覚再現装置
は未だ存在しない.
触覚は他の感覚に干渉せず,時空間次元の制御が可能であるため,他分野での応用が期
待されている.中でも視覚障害者向けの視覚代行装置としての需要は顕著であり,1879 年
に Noisezewski が触覚による視覚代行の可能性を示唆してから[36]しばしば試みられてきた.
3
1966 年頃から Optacon(optical to tactile onverter)[45][46]及び TVSS(tactile vision substitution
system)[47][48]という視覚代行装置が開発され,視覚代行としての触覚提示研究を発展させ
る大きな流れとなった.これらの開発の際,ソレノイド,空気ジェット,ウォータージェ
ット,電気刺激など様々なアクチュエータを用いた触覚提示が試行され,用途に合わせて
様々なタイプが製作された.これら 2 つの装置は,用途は限定されているものの触覚研究
から生み出された初期の本格的触覚デバイスとして,後の触覚デバイス研究に多大な影響
を与えた.
一方,実はバーチャルリアリティ分野において,上記の装置よりも早く触覚を取り入れ
た sensorama という装置が 1962 年に登場している[53][54].本装置は”Cinema of the future”
を掲げ,3-D,広視野角,モーションライド,ステレオサウンド,香り,風,そして振動の
提示という未来を先取った体感型の映画鑑賞を実現した.この製品は触覚を主として用い
ていないため本格的な触覚デバイスとは言い難いが,これほど早くに触覚を取り入れた装
置が他分野から登場し,しかもそれが映画という感性コンテンツのための装置であること
に大きな意味があると思われる.
図1 Sensorama [54]
4
その後,触覚研究起源の触覚デバイスは専門性を生かして医療福祉用途へ[28][29][30][31],
バーチャルリアリティ起源の触覚デバイスは思考の柔軟さからアトラクション,遠隔コミ
ュニケーション,作業支援,ゲームなど様々な分野へ進出した[32][33][34][35][36].そんな
中,力覚提示デバイスである PHANToM が 1993 年に開発され[55][56],これをきっかけとし
て力覚提示に関する研究が大きく花開いた.
図2 PHANToM [55]
PHANToM はバーチャルリアリティ分野の研究者によって製作されたが,その完成度の高
さから触覚分野の研究者からも大きな注目を集め,分野の垣根を越えた交流が進んだ.そ
の結果,力覚提示装置の利用が医療福祉分野にも盛んに行われる[38][39][40]など著しい進
歩がみられる.一方,触覚提示技術は小型化,効率化が進んだものの,提示される触覚の
質感はそれほど向上していない.これには大きく 3 つの原因が挙げられる.まずハードウ
ェアの問題である.触覚の質はアクチュエータの性能に直結するが,触覚提示に適したア
クチュエータが存在しない.次に,触覚の特性の問題である.触覚は全身に分布している
うえ部位ごとに特性が異なるため,汎用的なシステムの設計が困難である.最後に,開発
者の意識の問題である.これまでの触覚提示研究では,最も効率よく確実な触覚提示を志
向していたため特定の周波数やパタンを用いる例が圧倒的に多く,触覚独自の複雑な情報
提示を志向した研究は近年始まったばかりである.
今後は,触覚に独自性を持たせるため,触覚独自の情報を提示する研究がますます重要
となってくることが予想される.それに伴い,触覚提示技術の触覚の質感向上も大きく進
むことが期待される.
5
1.3 コンテンツにおける感性情報の重要性
科学技術の大きな発展により利便性や効率性がほぼ頭打ちとなっている現在,ユーザビ
リティや心地よさという人間中心の技術の重要性が増している.特にユーザが最終的に受
け取る内容=コンテンツは,アプリケーションやシステム全体の評価を左右する大きな要
因となるため,コンテンツ技術の成熟が欠かせない.
現在の世の中に溢れているコンテンツを俯瞰すると,映画,音楽,インターネットなど
圧倒的に視覚・聴覚に向けたものが多いことに気付く.次に多いと思われるのは,香水に
代表される嗅覚と,多種多様な料理というコンテンツを有する味覚である.では,触覚は
どうだろうか.携帯電話やゲーム機のコントローラに振動子が標準搭載されていることか
ら,触覚提示が可能なデバイス自体は既に広く普及していると言って良い.しかしながら,
これらのデバイスから提示される触覚は他の感覚によって実現されたコンテンツの引き立
て役として用いられ,決して主役とはならない.では,触覚と他の感覚では何が違い,触
覚には何が足りないのだろうか.この謎を解く鍵は,触覚で提示される情報にあると考え
る.
視覚・聴覚・嗅覚・味覚に共通した情報として存在するのは感性情報である.感性情報
とは,知覚された感覚情報の中の「どう感じるか」若しくは「どう思うか」という印象に
関わる情報のことを指し,感情の喚起に関する重要な役割を持つ.映像を見て感動し,音
楽を聞いて気持ちを落ち着かせる.香水の香りに興奮し,美味しい料理に癒される.この
ように,触覚を除く 4 つの感覚に向けたコンテンツには感性情報が多分に含まれており,
感情の起伏を作り出し,日常生活に豊かさと潤いを与えている.一方,普段我々が一般に
普及している触覚デバイスから得られるものは,数種類の振動パタンであることが殆どで
ある.そこには感性的な情報はもちろん存在しない.何故ならば,感性情報という視点で
触覚を設計していないためである.
視覚の場合,映画などの映像コンテンツについては様々な印象を与える映像表現が確立
され,iPhone[40]に代表されるような視覚情報端末では「気持ちよい操作感」を演出する映
像の工夫が随所に散りばめられている.聴覚の場合,音律が定義され,和音の心地よさの
尺度として「不協和度」が算出されるなど,感性表現に関する理論が既に確立されている[41].
「泣きたい時の曲」
「楽しい曲」などの分類が存在することからもそれが裏付けられる.嗅
覚の場合,女性又は男性が好む香り,落ち着く香りなどが詳細に分類され,好みに合わせ
て用いることができる[42].アロマテラピーが良い例である.味覚の場合,味の要素と美味
しさの関係解明が進んでおり[43],好みや気分に応じた味の抽出・再構成が可能である.こ
のことから,多種多様の「~味」を持つ調味料や菓子等が登場している.一方,触覚と感
性情報の関係解明は,残念ながら他の感覚ほど進んでいない.では,触覚には感性情報が
稀薄なのかというと,決してそんなことはない.人と触れ合うときの緊張感や安心感,ク
ッションに顔を埋めたときの気持ちよさ,虫を触った時の気持ち悪さなど,触覚によって
6
感情が喚起される場面は数多い.また,一人称の直接的な体験であるため,その印象は強
い傾向がある.さらに,そもそも「感情」とは何かに触れるという皮膚組織からくる感覚
的印象を含む言葉であることが知られており[57],触覚にはヒトの心に作用する原始感覚の
1 つであるとされている[58].よって,むしろ触覚こそが感性情報を多分に含む感覚だと思
われる.
ここで触覚と感性の関係を取り上げた研究を紹介する.Tichener は「明るい圧」
「鈍い圧」
等の独創的な触覚表現を用いた触ピラミッド[59][60]という極めて独創的なモデルを発表し,
複数の研究者がこの触ピラミッドを用いて触覚と感性の結びつきを調べる実験を行った.
その結果,喚起される感情と触覚の関係についてある程度の傾向が示された[61][62].これ
は,触覚提示によって特定の感情を喚起させる可能性を示唆している.以上から,触覚に
おける感性コンテンツの実現は現実味のある課題であると考えられる.
1.4 本論文の目的
以上の要点を以下にまとめる.
・
神経心理学による触覚研究は,古くから取り組まれてきた要素的,分析的な研究から
認知や感情との関連に関する研究へ移行しつつあり,今後は他の感覚と関連しながら
意識や心の解明を目指すであろうことが推測される.
・
1960 年代から数多くの触覚デバイスが登場してきたが,
「ハードウェア」
「触覚の特性」
「開発者の意識」という問題から触覚提示技術は他の感覚提示技術と比較して進歩が
遅いのが現状である.
・
現在広く普及しているコンテンツにとって感性情報が大きな位置を占めているが,触
覚は感性情報の提示を志向した研究やコンテンツ例が尐なく,出遅れている.
つまり,神経心理学的,社会的な動向から触覚における感性情報が今後一層重要な位置
を占めることは確かであるが,提示デバイスに関する技術が未発達であることが問題とな
っている.また,研究事例の尐なさから具体的にどのような感性情報を持つ触覚コンテン
ツが存在し得るのか分かっていない.そこで本論文では,
「触覚による豊かな感性表現のために必要な触覚提示手法を提案する」
「提案手法を用いて触知覚特性に沿った感性触覚コンテンツ群を提案・実装する」
という 2 点を実行することにより感性触覚コンテンツ技術を進展させることを目的とする.
1.5 本論文の構成
本論文の構成は以下の通りである.
7
第 1 章では,触覚研究の歴史を神経心理学,触覚提示技術の両面から紐解くと共に,触
覚の普及に必要であると考える触覚コンテンツの充実に対する感性情報の必要性について
述べる.
第 2 章では Hi-Fi 触覚ディスプレイと題し,前半で本論文が対象とする人間の触覚に関し
て用語の定義と触知覚の構造及び働きの概説を行うと共に,これまでの皮膚触覚ディスプ
レイを空間特性,時間特性の軸に分けてそれぞれ概観し,本論文が目指す触覚ディスプレ
イの条件を明確にする.後半で条件を満たす触覚提示手法を提案し,実装及び性能評価を
行う.
第 3 章から第 9 章では第 2 章で提案した触覚提示手法を用いた 5 つの触覚コンテンツを
提案し,その効果を検証する.
まず第 3 章にて触覚コンテンツを考える際に重要な触知覚特性を示し,その特性に沿い
且つ感性情報を富に含むと思われる感性触覚コンテンツ群を示す.
第 4 章では生物感と題し,生物を感じ得る動的な触覚を本提案手法によって提示し,「生
きている」ことへのリアリティと親しみをユーザに与える.
第 5 章では Skin to Skin と題し,より自然で効果的な対人触覚コミュニケーションを本提
案手法によって実現する.
第 6 章では粘着性粘弾性体感と題し,
「心地よさ」と「気持ち悪さ」の相反する感情を想
起させる粘着性粘弾性体の再現を本提案手法によって行う.
第 7 章では吸飲感覚と題し,物体を吸飲する際に生じる抵抗感や振動を口唇部及び口内
に提示し,バーチャルな吸飲体験を実現する.
第 8 章では触覚のスロー再生と題し,映像におけるスローモーション再生の効果を触覚
でも提示することを試みる.
第 9 章では触覚コンテンツ総括と題し,5 つの触覚コンテンツの提案・実装の経験から得
られた触覚表現の可能性と本提案手法の本質的な価値について論じる.
最後に,第 10 章にて本論文のまとめと結論を述べる.
8
第2章
Hi-Fi 触覚ディスプレイ
本章では,対象とするヒトの触覚の構造と働きを概説し,本論文で目指す感性触覚コン
テンツに必要な触覚ディスプレイについて考察する.その後,提案する触覚提示手法につ
いて述べると共に性能評価を行う.
2.1 皮膚触覚受容器の構造と働き
まず,本論文が対象とする触覚の定義を行う.何故ならば,どこまでを触覚と呼ぶかに
ついては過去様々な議論があるものの未だ明確になってはいないためである.
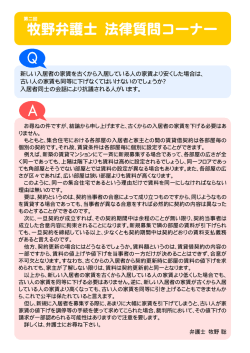
触覚は身体感覚(Body Sence),体性感覚(Somatic Sense) とも呼ばれる.本論文では人の持
つ全ての感覚から頭部に存在する 5 つの感覚(視覚,聴覚,味覚,嗅覚,平衡感覚)と内臓感
覚を除いた感覚を触覚と定義する[64].触覚は受容器の存在する場所によって二種類に分類
される[64][63].第一の触覚は皮膚感覚(Cutaneous Sensation) と呼ばれ,皮膚下に存在する各
種受容器,または神経末端からの信号によって生じる感覚である.
第二の触覚は自己受容感覚,または固有受容感覚(Proprioception) と呼ばれる.固有受容
感覚は筋肉の伸縮,腱,関節の角度等,自分自身の状態に関する情報を担当する.固有受
容感覚は受容器の存在部位が皮膚感覚に比べて深部に存在するため,深部感覚 (Deep
Sensation) とも呼ばれる.
知覚行動によって触覚を分類することも出来る.例えば人が触覚によって物体の表面情
報を得ようとするときには指を能動的に動かす.このとき皮膚感覚と固有受容感覚は協調
するものと考えられる.この協調の度合に応じて,知覚現象としての触覚を三つに分類す
ることが出来る第一の触覚は触知覚(Tactile Perception) であり,皮膚感覚のみによる知覚で
ある.第二の触覚は触運動知覚(Haptic Perception) であり,皮膚感覚と運動感覚が共に働く
ことで得られる.最後の触覚は運動感覚(Kinesthetic Perception) であり,皮膚感覚によらな
い知覚である.これらのうち,触知覚と触運動知覚は受動触知覚,能動触知覚と言い換え
ることができる.
9
触覚(Tactile Sensation)の受容部位による分類
皮膚・皮下組織
皮膚感覚
(Cutaneous Sensation)
機械受容器・神経終末
触知覚/受動触知覚
(Tactile Perception)
関節・筋肉
固有受容感覚
(Proprioception)
筋紡錘・関節内部の機械受容器
触運動知覚/能動触知覚
(Haptic Perception)
運動知覚
(Kinesthetic Perception)
触覚(Tactile Sensation)の知覚行動による分類
図3 触覚の受容部位・知覚行動による分類
本論文における触覚ディスプレイは受容部位として皮膚感覚の提示を目的とし,知覚行
動としては能動触知覚及び受動触知覚を対象とする.
2.1.1
皮膚構造
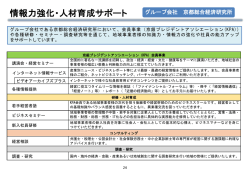
皮膚触覚は当然ながら皮膚で知覚される.図 4 は人の無毛部の皮膚断面である.皮膚は
外界と接する表皮(Epidermis),その下の真皮(Dermis),最下層の皮下組織(Connective Tissue)
の三層からなる.表皮の厚さは部位によって大きく異なり,平均では 0.06~0.2mm である
のに対し,手,掌,足底では約 0.6mm である.真皮は厚さ 0.3~2.4mm 亜程度で強い繊維性
結合組織である.
皮膚には機械的変形や温度変化等に反応する多くの感覚器が存在する.本論文で主に扱
うのは皮膚の機械的変形に応筓する,機械受容器と呼ばれる感覚器である.機械受容器は 4
種類存在する.Meissner 小体(RA:RAI,FAI と記述される場合も存在する),Merkel 細胞(SAI),
Ruffini 小体(SAII),Pacini 小体(PC:FAII と記述される場合も存在する)である(図 4 ).
10
図4 無毛部における人間の皮膚構造[65]
2.1.2
触覚の空間特性
触覚の空間特性は,刺激に対する感度と空間分解能で表すことができる.また,部位に
よって受容器分布密度が異なるため,感度や空間分解能も部位によって異なる.
2.1.2.1
各受容器の受容野
受容器一つあたりに皮膚表面変位を与えた際に神経活動を生じさせることが出来る空間
的領域を受容野と呼び,受容器によって広さが異なる.
RA,SAI は共に皮膚表面近くに存在するために受容野は狭く,12mm2 程度である.その
ため,分布密度は高い傾向にある.また,受容野の領域は明瞭である.
PC,SAII は RA,SAI と比較して非常に大きな受容野を持ち受容野の境界は不明瞭であ
る.具体的な受容野の面積は,PC が 100mm2 程度,SAII が 60mm2 程度である[66].さらに
PC では,SAI,RA と異なる「空間加算」特性が知られている.これは細い棒を接触子とし
て皮膚表面に振動を加えた場合に較べ,太い接触子を用いた方が,神経活動を劇的に生じ
やすくなるというものである.この現象は PC が皮膚深部に存在するため,皮膚表面変位と
受容器の間の弾性体の層が空間的低周波通過フィルタとして働き,空間的な低周波を多く
含んだ大きな接触子の方が変位を深部の受容器まで伝えやすいことが原因である.
11
図5 卖一受容器の受容野[66]下段:測定した受容野.1 点が 1 ユニットに対応.RA, SAI は
von Frey 毛で測定.PC はガラス棒で軽く叩き,SAII は皮膚を矢印方向に引いて測定.中段:
1 ユニットの受容野の感度分布を等高線で表したもの.細い縦線は指紋.上段:中段図を横
切る実線に沿った閾値.縦軸右側は閾値そのもの,左側は最小閾値の倍数で示している.
2.1.2.2
触覚の空間分解能
皮膚感覚の空間分解能は,2点弁別能,継時2点弁別能で表される[63].2 点弁別は,針
を用いて空間的に離れた 2 点を同時に刺激し,その刺激が 2 点であることを認識可能な最
短距離を計測する方法である.この結果により得られた特性を 2 点弁別能と呼ぶ.継時2
点弁別とは,針を用いて部位の両端を順々に刺激し,その刺激が 2 点であることを認識可
能な最短距離を計測する方法である.この結果より得られた特性を継時2点弁別能と呼び,
傾向は高い相関を示す一方,値そのものは 2 点弁別域のそれより高精度となる.これらの
弁別能は部位により大きく異なる(図 6 ).例えば手は,指先,中節,手掌における受容器の
密度と空間分解能は相関関係にある(図 7 ).
12
図6 体表部における触 2 点弁別閾[67]
図7 手の各部位における触覚の空間解像度と各受容器の存在密度[63]
13
2.1.2.3
触覚の感度
機械的刺激には,定常,速度一定,加速度一定などの提示方法があるが,その中でも定
常刺激に対する感覚を圧覚,振動刺激に対する感覚を振動覚と大別される.感度は基本的
に受容器の分布傾向と相関関係があるが,表皮の厚さや脂肪の有無,温度等の影響も大き
く,結果として受容器の分布通りではない場合も存在する.図 8 より,手部,顔部,口部
の感度が他と比較して高い傾向にある.
図8 体表部における圧覚の閾値 [65]
以上から,本論文における触覚提示部位は比較的感度と空間分解能の高い手部,特に手
掌部とする.また,一部では頬部や口唇部も対象とする.
2.1.3
受容器の時間特性
触覚受容器の時間特性は主に知覚される周波数帯域,順応,応筓速度からなる時間的特
性のことである.
順応性とは,刺激に慣れる特性のことであり,皮膚表面に静的な変位を与えた際に受容
器が発火しなくなるまでの時間で表す.速順応性のものはすぐに(~1[s]) 順応して発火しな
くなるのに対し,遅順応性のものは変位が生じている限り数分のオーダーで発火し続ける.
RAI,PC が速順応性で,SAI,SAII が遅順応性である.
14
触覚における神経パルスの伝達速度は受容器によらず 40~70m/s であり,高速な応筓性を
有している.これは直径 8um 以上の太い有髄神経線維を用いているためである.よって,
触覚は瞬間的と言えるほどの刺激でさえ継時的な情報として読み取ることができる.
各受容器の周波数特性を見ると,まず RA は主に周波数 20-70Hz の範囲で応筓し,特に
30Hz 付近に明瞭な共振特性を持つ.ただし,20Hz 以下や 70Hz 以上の周波数についても感
度は落ちるが知覚しないわけではなく,刺激の強度によっては約 2Hz から約 100Hz 程度ま
で応筓する.機械的振動に正確に同期して発火し,弱い振動では 1:1 の比率で発火してい
るが,強くなると 1 回の振動に対して 2~3 回発火するようになる.同期発火の正確さか
ら,RA は低周波振動の知覚を担当していると言われている.機械振動を用いた周波数弁別
実験において,30Hz 付近では 2Hz 程度の差を明瞭に知覚可能であることが分かっている
[68] が,この知覚能力を可能としているのが RA である.RA が備える周波数弁別の優秀さ
から,テクスチャなど質感のコーディングに大きく関わっているものと推測される.
PC は 100-300Hz 程度の比較的高い周波数に応筓することが知られ,200Hz 付近に明瞭な
共振特性を持つ.また,RA と同様に 100Hz 以下や 300Hz 以上の周波数についても感度は落
ちるが知覚し,高周波側では 1kHz までの知覚が確認されている.PC の特徴として,時間
特性が極めて高い反面,感覚が大きな空間的広がりを有することが挙げられる.このため,
空間的位置のコーディングにほとんど関与しておらず,刺激のトリガ的な役割を担ってい
るものと推測される.
SAI は 0-200Hz の広範囲で応筓し,他の受容器と異なり卖体の細胞であることからそれ
自体としての共振特性は持たず,応筓特性は皮膚の特性そのものであると考えられる.特
に直流成分に対して十数分という非常に遅い順応を示すため,SAI は皮膚変位そのものを
コーディングしているといえる.SAI は特に低周波領域における特性に優れ,圧覚のコーデ
ィングが主用途であると考えられている.SAI の発火周波数は SAI 受容器の存在位置にお
けるひずみエネルギーにある範囲で比例していることが解明されており[69],日常的な圧力
では 100Hz 以下程度の神経発火を示す[70].SAI の特徴として,刺激によって生じる圧覚が
「いつの間にか」生じた感覚として認識されることである.この不明瞭感は,刺激周波数
を上げても変わらない.この劇的な現象は普段我々が何気なく得ている,物を「触った」
という知覚が,RA 又は PC による「触った瞬間」を示す信号と,SAI による「触り続けて
いる」ことを示す信号との合成によって初めて成立していることを示唆している.
SAII は数 Hz~100Hz 程度までの周波数に応筓する.また,深部に位置するため振動刺激
に対する感度は低く,皮膚の持続的な変形,すなわち引っ張りによってよく発火する.こ
のことから,SAII は皮膚と対象の間ずれをコーディングしているといえる.またこの受容
器は「時間加算」特性を有している.これは刺激し続けることで刺激の知覚強度が増すと
いうものである.
各受容器の特性を総合すると,触覚は非常に高速に伝達され,0~1kHz までの周波数帯で
知覚されていると言うことができる.また,順応が存在することから定常的な提示に難が
15
あることを考慮する必要がある.
図9 各種機械受容器の垂直振動に対する応筓[71]
2.2 従来の触覚ディスプレイ
触覚ディスプレイは前述した空間特性,時間特性を基準として設計することが一般的で
ある.その際,提示部位はあらかじめ決められていることが多いため,空間特性では刺激
密度の設計に必要な部位の空間分解能,時間特性では目的とする刺激に必要な周波数帯域
となる.時間特性の中には応筓速度も含まれているが,基本的に高周波への対応具合で応
筓速度も推し量れるため,周波数帯域の中に含めることができる.よって,
空間特性=空間分解能, 時間特性=周波数帯域
と置き換えることが可能であるため,以降では,空間分解能と周波数帯域という言葉を用
いる.現在のところ,空間分解能と周波数帯域を両立させた装置は存在せず,用途に合わ
せてどちらかに特化された装置が用いられている.刺激方法は機械振動,凹凸形状,電気
が主流であり,それぞれの方式で多くの触覚ディスプレイが開発されている.以下にそれ
ぞれの特性に特化した触覚ディスプレイの例を示す.
16
2.2.1
空間分解能の高い触覚ディスプレイ
空間分解能の高い触覚ディスプレイは,主に点字・文字・図といった記号的情報や環境
情報の提示を主目的としてきた.その理由は,記号や環境情報の正確な提示には細かな形
状情報が必要とされるためである.主な用途は視覚代行,聴覚代行である.代表的なディ
スプレイは 1.2 で述べた Optacon [45][46]と TVSS [47][48]である.Optacon は視覚障害者の
ための読書補助器として開発され,指先への触覚提示部とカメラから構成されている.触
覚提示部は 24×6 の刺激子を持ち,ピッチは横 2.4mm,縦 1.2mm である.これは,指先の
空間分解能をほぼ満す.アクチュエータとして主に圧電素子が用いられており,それぞれ
の刺激子が独立して振動することでカメラから取得した文字パタンを指先に提示する.
TVSS は周辺の環境情報の知覚を目的として開発され,背部や腹部への触覚提示部とカメラ
から構成されている.触覚提示部は 10×10~32×32 程度の刺激子を持つ.アクチュエータ
としてはソレノイドや電極,空気圧等が用いられており,ピッチは最小約 10mm 程度であ
る.また近年,高密度・大面積化を目指した視覚代行装置が開発されている.DV-2[49]は文
字だけでなく図などの比較的複雑なパタンの提示を目的として開発された点図ディスプレ
イである.手全体に触覚を提示することで凹凸を認識し,全体図を把握することが可能で
ある.点間ピッチは 2.4mm であり,32×48 ドットがマトリクス状に並べてある.アクチュ
エータとして圧電素子が用いられており,それぞれのピンが独立して上下することで凹凸
のある図が表現される.Forehead electrotactile display[50][51]は TVSS と同様,周辺の環境情
報の知覚を目的とした触覚ディスプレイであるが,提示部位が体幹部ではなく額部となっ
ている.撮像素子であるカメラも提示部と同じ位置に配置されているため,頭部の動作に
合わせた知覚が可能である.点間ピッチは 3mm で,額の皮膚に空間的に電気刺激を行う.
NHK 放送技術研究所では,人間の空間応筓以上のピッチである 1.27mm の高精細触覚ディ
スプレイを開発している[52].
これらのディスプレイは,触覚の空間応筓性をほぼ満たしている一方で,更新周波数は
数十 Hz 程度と低く,刺激強度の多段階出力が構造的に難しいという特徴を持つ.
図10 Optacon[45][46]
17
図11 Dot View DV-2[49]
図12 Forehead electrotactile display[51]
2.2.2
広い周波数帯域を持つ触覚ディスプレイ
近年,空間応筓の向上が頭打ちになりつつあること,より広範囲の用途に触覚を活用す
るためには記号的情報提示だけでなく触覚独自の情報を提示する必要性が高まっているこ
とから,物体の質感を提示する研究が台頭してきた.質感は多数の周波数が含まれた複雑
な情報であることから,広い周波数帯域を持つ装置が求められる.質感提示に関する研究
18
では,大きく分けて 2 つの方式が存在する.第一に,質感情報の記録・再生である.小川
らは「擦り合わせる」という動作に最適化させた布の質感提示装置を開発した[18].この装
置ではアクチュエータとしてシャフトモータが用いられ,10kHz という高い更新周波数で制
御されており,提示可能な周波数は 400Hz 程度までである.第二に,人工的なテクスチャ
感の合成である.昆陽らは繊毛状の ICPF アクチュエータを用いた布の質感提示を試みてい
る[19].この装置では,提示可能な周波数は 0.5Hz~300Hz 程度である.仁木らは物体接触
時に発生する振動を提示することで木や金属の違いの表現に成功している[20].アクチュエ
ータとしては DC モータが用いられ,小川らの装置と同様 10kHz の更新周波数で制御され
ている.山本らは静電アクチュエータを用いた触覚ディスプレイを開発し,微細な表面テ
クスチャの表現を行っている[72].
触覚ディスプレイではないが,力覚ディスプレイにも高い更新周波数を持つ装置は存在
する.佐藤らは 10kHz という更新周波数を備えた SPIDAR[73]を開発し,硬質な物体との力
覚インタラクションを可能としている.
図13 布質感提示装置[18]
図14 ICPF アクチュエータを用いた触覚ディスプレイ[19]
19
図15 高速応筓簡易型ハプティックディスプレイ[20]
図16 静電触覚ディスプレイ[72]
図17 SPIDAR[73]
20
2.3 本論文で目指す触覚ディスプレイ
2.3.1
感性触覚コンテンツの提示に適する触覚ディスプレイの条件
現在のコンテンツ産業における主流は,映像や音楽等に代表されるように視覚・聴覚を
用いた感性的コンテンツであることは明白である.視覚・聴覚では古くから情報伝達技術
とそれを応用したコンテンツ技術が相互に発展し,我々の生活に深く根ざしてきた.特に
ディスプレイ技術に関しては完成の域に達しつつあり,日常生活における風景や音の卖な
る再現を超え,独自の感性表現を可能としている.
一方触覚では,2.2 にて述べたように様々な提示装置が開発されているものの,触覚の再
現を超えた独自の表現が可能なレベルにまで至っていない.また,触覚を用いて提示する
コンテンツに関する技術は未成熟な部分が多く,本格的な研究が始まったばかりである.
特に,視覚・聴覚コンテンツの普及に大きく影響したであろう独自の表現は,触覚コンテ
ンツを視覚・聴覚に次ぐ第三の柱とする上で欠かせないにもかかわらず研究事例は尐ない.
ここで,触覚による感性的情報の伝達に必要な条件を身近な生活の中から考えてみる.
まず,触覚における最も感性的な体験の 1 つとして,頭を撫でる,抱きしめる等のスキン
シップが挙げられる.スキンシップの際に生じる知覚を空間分解能,周波数帯域に分解し
て考えると,殆どのスキンシップが手全体や腕全体などの広い面積を用いて行っているこ
とから,空間分解能はそれほど必要とせず,むしろ低い方が良いとすら言える.一方で,
微妙な刺激周波数の変化が印象に直接結びつくため,幅広い周波数帯に対応する必要があ
ると思われる.その他,一般的に心地よいとされる触覚刺激であるマッサージや服の着心
地など,スキンシップと同じような時空間特性を持つ事例が数多く存在する.
次に,独特の触感を主役とした製品を見てみる.古くから存在するものとしては,スラ
イム[74]があり,その独特の触感は多くのユーザに親しまれている.カオマル[75]は,握っ
た際の触感を追求した顔型のボールで,触感はもちろん,握り方によるボールの表情の変
化から疑似的なスキンシップが体験できる製品である.バンダイは,実体験として心地よ
い触感を無限に楽しむことをコンセプトとして,気泡緩衝材をつぶす触感を再現した∞プ
チプチ[76]をはじめとした感性触覚コンテンツの先駆けとも言える製品群を発売している.
研究の分野では,小島らが鉛筆削りの心地よさを再現する試みを行っている[77].また,大
島らが腹部に振動刺激を行い,刀にバッサリ切られたかのような線状の刺激を提示する装
置を開発している[78].これらの時空間特性を見てみると,ほぼすべての動作に体幹部,手
全体,指全体が用いられており,やはり空間分解能は低い事例が多い.また,素材やイン
タラクションの方法によって必要な周波数帯域が大きく異なることから,触知覚領域全て
の周波数帯に対応可能であることが求められる.
時空間特性とは別に考慮すべきポイントとして,提示面積と階調性が挙げられる.全て
の例において指先以上の比較的大きな面積が刺激対象であることから,提示可能な面積は
大きい方が望ましいと考えられる.また,マッサージ等の例にみられるように力の微妙な
21
変化を滑らかに提示する必要があることから,高い階調性が求められると思われる.階調
の重要性は,視覚・聴覚において階調が高いほど豊かな表現が可能であることからも確か
められる.
図18 独特の触感を主役とした製品例
左:スライム[74] 右:∞プチプチ[76]
図19 Eternal Sharpener[77]
22
以上から,感性触覚コンテンツに必要な触覚ディスプレイの基本条件として,空間分解
能は必ずしも高い必要はなく,十分に広い周波数帯域が必要であることを確認した.また,
上記の例から比較的大面積への提示及び微妙な力の変化を出力可能な階調性が効果的であ
ることも分かった.
その他,触覚ディスプレイで実際に触覚提示を行う際に問題となる要素として,外乱を
挙げる.ここで言う外乱とは本来提示したい触覚とは別の触覚情報のことを指し,具体的
には皮膚に直接接触する刺激子の素材感や形状情報,駆動部から発生する不要な振動等で
ある.外乱は触知覚に悪影響を及ぼすことから,当然ながら無い方が望ましい.
これらをまとめると,以下の項目が感性的触覚コンテンツに対する主な必要条件である
と考えられる.
・周波数帯域=広(1kHz 以上)
・提示面積=中~大(指先以上)
・階調性=高
・外乱=無
2.3.2
触覚ディスプレイの設計
2.3.1 で導き出した感性的触覚ディスプレイの条件に対する従来型触覚ディスプレイの現
状と本論文が目標とする触覚ディスプレイの目標を表 1 に示す.
表1 感性的触覚ディスプレイの条件に対する各ディスプレイの性能
必要条件(目標)
空間分解能の高い装置
広い周波数帯域を持つ装置
周波数帯域
広(1kHz以上)
狭(数十Hz)
中(数百Hz)
提示面積
中~大
小~大
小~中
階調性
高
低
高
外乱
無
有
有
従来の触覚ディスプレイと感性触覚提示の必要条件を比較した場合,空間分解能の高い
触覚ディスプレイは時間応筓性が不足しており,階調性も乏しい.一方,周波数帯域の高
いディスプレイを見た場合,必要条件に近い性能を有していることが分かる.よって,本
論文でも周波数帯域に特化することを目指す.
しかしながら,現行装置にはキーポイントである周波数帯域が未だ不足しているという
問題がある.既に 2.2.2 で述べたように,制御に関しては 10kHz の制御周期を実現している
ことから,この問題が制御側に起因することは考え難い.よってこの問題は触覚提示側の
ハードウェアが大きな障壁となっている可能性が高い.ハードウェアは,大きく分けて使
23
用するアクチュエータと機構によって性能が大きく左右される.特にアクチュエータの性
能はハードウェア性能の根幹に関わる重要な要素である.
これまでの触覚提示装置に用いられてきた素子としては主に,ソレノイド,圧電素子,
空気圧,水流,小型電極,小型モータ,超音波がある.各素子の特徴をまとめて表 2 に示
す.表より,従来の刺激素子ではその周波数帯域と階調性が両立しているものは電極によ
る刺激以外に存在しない.しかしながらこの電極に関しても,刺激子を皮膚に接触させる
必要があることから外乱の発生は免れない.また,電極による電気刺激は人工的な感覚を
生じさせてしまう.
表2 素子とその特性
素子名
周波数帯域
提示強度 構造 多段階表示
提示条件
ソレノイド
0~100Hz
◎
複雑
不可
接触
ピエゾ
数十~数百MHz
×
単純
不可
接触
空気圧
数十Hz
○
複雑
不可
接触/非接触
水流
数十Hz
○
複雑
可
接触
電極
0~数MHz(パルス間隔)
×
単純
可
接触
モータ
0~数百Hz
◎
複雑
可
接触
超音波
20Hz~1kHz
×
複雑
不可
非接触
以上の現状を踏まえた上で,本論文では目標とする条件に対するハードウェアの問題を
解決し,広帯域性,大面積,高階調性を備え,外乱の影響を大幅に低減可能な触覚提示手
法を考案する.以後,提案する周波数帯域に特化した高品位触覚提示のことを,オーディ
オ業界における高品位再生の名称である Hi-Fi オーディオに例えて Hi-Fi 触覚提示と呼ぶこ
ととする.
2.4 提案手法
以上の議論より筆者が提案するのは,ダイナミック型音響スピーカをアクチュエータと
し,手掌部全体に空気圧駆動で圧力を提示するという手法である.提示対象は主に手掌部
とする.本手法ではまず,スピーカコーンと掌を密着させてスピーカコーン(以下コーン)
-手掌部間を密閉状態とする.その後,たとえばスピーカに正弦波を入力するとコーンが
振動する.この時,コーンが手掌部に対して近づく方向に動けばコーン-スピーカ間の体
積が減尐し,空気圧が上昇する.この時,手掌部には押圧力が提示される.逆にコーンが
手掌部に対して遠ざかる方向に動くとコーン-スピーカ間の体積が増加し,空気圧が減尐
する.この時,手掌部には吸圧力が提示される.このように,押圧力と吸圧力の提示を繰
24
り返すことで触覚提示を行うのである.
空気圧を用いた触覚提示装置はこれまでにも研究されている[45][79][80].しかしこれら
は記号ないし形状を提示するために電磁弁を使用しており,周波数帯域は低い.また,空
気圧を直接提示せず,あくまでも刺激子の駆動に用いていることから,本手法における空
気圧の使用方法とは根本的に異なる.
図20 本提案手法の概要
本手法の新規性は,空気圧の非接触性と,音響スピーカの優れた時間特性を併せ持つこ
とにある.本手法の主な特徴は以下の通りである.
1.
幅広い周波数帯域を持つ.フルレンジタイプの音響スピーカは一般に 20Hz~20kHz ま
での周波数に対応している.さらに,20Hz 以下の波形に対しても通常のアンプ回路の
カットオフ周波数変更及び放熱機構を追加することで駆動可能である.20kHz は触知覚
の限界である 1kHz を大きく上回っていることからオーバースペックではないかという
疑念が生じる.しかしながら,ある周波数を歪みのない波形で出力する場合はその 10
倍以上の周波数帯域が必要であると言われていることから,触覚の場合は尐なくとも
10kHz 以上の周波数を再生できる能力が求められる.また,聴覚において超音波領域が
音質に作用するという話があるように,触覚においても 1kHz 以上の周波数が触知覚に
何らかの影響を及ぼしている可能性は否定できない.よって,20kHz という広大な周波
数帯域は触知覚に悪影響を及ぼさず,むしろ品質向上の補助と成り得る.
2.
高い階調性を持つ.アナログ出力である音響スピーカの階調は,アンプや制御側の制
約により上限が決まる.よって,高い分解能を持つ制御系を組むことで優れた階調表
現が可能である.
3.
外乱をほぼ除去することが可能である.本手法は空気圧によって皮膚を一様に刺激す
25
る仕組みであるため,皮膚と刺激子が接触することは原理的に無い.よって,刺激子
による余計な素材感を提示しない.また,スピーカコイル以外の駆動部が存在しない
ため,意図しない振動は生じない.以上から,外乱がほぼ取り除かれ,提示したい触
覚を正確に提示することが可能である.
4.
大面積への触覚刺激が容易に実現できる.広い周波数帯域を持つ触覚ディスプレイの
中で手掌部全体という広い面積を積極的に活用する例は,斎田らによるソレノイドを
に用いた視覚代行器[81]及び澤田らの形状記憶合金を用いた触覚ディスプレイ[82]以外
にはほぼ存在しない.また,本手法では大型のスピーカを用いることでより大面積へ
の提示も容易に行うことが可能であるなど,提示面積に対する柔軟性が高い.
ここまでの特徴で,本手法は本論文が目標とする触覚ディスプレイの必要条件を全て満
たしたと言える.以下は目標とする条件以外の特徴である.
5.
聴覚と触覚のマルチモーダルな感覚提示が容易に実現可能である.アクチュエータと
して用いている音響スピーカの広帯域性により,触覚領域(低周波)と音声領域(高周波)
を合成した波形を出力するだけで音を聞きながら触覚も楽しむことが容易に可能であ
る.
6.
負圧が提示可能である.本手法はスピーカを凹凸の両方向に駆動するため,正負両方
の圧力が提示される.特に負圧を知覚させるという試みは吸引圧刺激による触覚生成
[83]や粘着感の提示[84]などの特殊な事例以外では殆ど扱われてこなかった.本手法が
これを扱うことで,触覚表現の幅を広げることが可能である.
7.
構成が簡素であるため,小型・軽量・低コスト化が容易である.特に,アクチュエー
タである音響スピーカは多種多様な製品が既に市場に登場していため,据え置き機器
からポータブル機器に至るまで,形状・サイズ・重量等,組み込む機器に応じて柔軟
に選択することが可能である.
2.5 評価実験
幅広い周波数帯域に対する本手法の触覚提示能力を検証するため,各周波数における圧
力振幅を記録する実験を行った.
2.5.1
実験装置
実験装置は,音響スピーカ(S.J ES-06603),アルミ製プレート,空気圧センサ(フジクラ
PSM-005KPGW),インタフェースボード(Interface Corporation PCI-3523A),アンプ(ラステー
ム・システムズ RSDA202),PC から構成されている(図 21 ).音響スピーカはアルミプレー
トで密閉されており,このアルミプレートの中央に開けた穴から空気圧センサを挿入する
26
ことで空気圧を記録できる構造とした(図 22 ).
スピ ーカ
出力波形
Stereo Amplifer
Interface Board(DA)
正弦波
PC
空気圧セン サ
圧力値
Interface Board(AD)
図21 実験装置のブロック図
Plate
Speaker
Air pressure
sensor
図22 実験装置の構成
2.5.2
実験内容
実験では,出力波形として正弦波を用い,PC にて生成した.信号はインタフェースボー
ドによってアンプに伝達,増幅された後スピーカにて出力した.出力電圧の振幅(アンプに
て増幅された後の振幅)は周波数によらず±10V,出力した周波数は,1~10Hz まで 1Hz 刻
み,10~100Hz まで 10Hz 刻み,100~500Hz まで 100Hz 刻みとした.なお,500Hz までと
した理由は空気圧センサの応筓周波数が 500Hz までであることに起因しており,スピーカ
27
の特性上は 500Hz 以上での駆動も十分可能であることを補足しておく.
2.5.3
実験結果
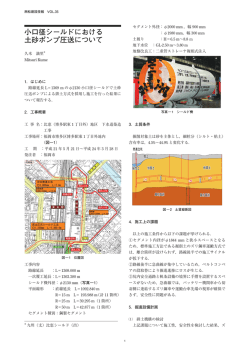
Presented air pressure [kPa]
測定した圧力振幅の結果を以下に示す.
2.5
2
1.5
1
0.5
0
1
10
100
1000
Frequency [Hz]
図23 各周波数における提示圧力
図 23 より,本実験装置では尐なくとも約 1.4kPa の圧力が提示可能であることが分かっ
た.これを力に換算すると,スピーカの直径=60mm から,
1400 × { (30 × 10-3)2 × π} = 約 4N
となる.また,100Hz までは均一な圧力が記録され 100Hz 以上では値が上昇しているが,
これはスピーカ及びアンプの周波数特性が原因だと考えられる.これは,スピーカ及びア
ンプの周波数特性をあらかじめ調べ,それに応じて出力電圧の振幅を調節することで均一
化することが可能だと思われる.
以上から,音響スピーカを用いた直接的な空気圧駆動による圧力提示手法について,主
要な受容器の応筓周波数範囲(0-800Hz 程度)に関して周波数によらず約 4N 以上の力が提示
可能であることを示した.このことから,本提案手法は本論文の目的である幅広い周波数
帯域における触覚提示に有効であることが示された
2.6 実装
2.5 の結果を受け,実際に本手法で提示される触覚を体験するための装置を製作した.本
装置では音響スピーカ(S.J ES-06603)が対となって取り付けてあり,体験者は両手で抱える
ように持つこととした.波形はファンクションジェネレータ(HITACHI,VG-4429)によって
1~1kHz までの正弦波を生成し,アンプを通してスピーカに出力した.以下に装置のブロッ
ク図,外観,体験の様子を示す.
28
出力波形
Stereo Amplifer
Speaker x 2
Function Generator
図24 装置のブロック図
図25 体験装置
29
図26 体験の様子
本装置を数十人に体験させた結果,全ての体験者から 1~1kHz までの全周波数帯域で触
覚を知覚できたとの回筓を得た.この結果は,2.5 にて行った評価実験の結果を裏付けるも
のとなった.また,数 Hz 程度の周波数について非常に柔らかな触感を知覚したとの回筓も
得た.柔らかさという物性情報はこれまで力覚の分野で提示され,触覚では表面テクスチ
ャのみに留まっていたことを考えると,物性を触覚提示装置で提示可能となったことは大
きな利点であると言える.
一方で触覚提示の際に大きな問題が 2 点生じた.第一に手掌部とスピーカ間の空気漏れ
問題である.第二に波形を提示する際の波形の再現性に関する問題である.以降では,こ
れらの問題点に対する対策案の試行及びその結果について述べる.
2.7 空気漏れ問題
本章では直径約 60mm の音響スピーカを体験装置に使用している.この場合,成人男性
はほぼ問題なくスピーカ全体を手掌部で覆うことが可能である.しかし女性や子供の場合,
手のサイズが比較的小さいため現在の直径ではスピーカ全体を手掌部で覆うことが難しい.
よって密閉性が保たれず空気漏れが生じ,触覚を十分に提示できなくなる問題が生じる.
筆者はこの問題に対し 2 つの対策案を試行した.第一は,スピーカコーンを薄く柔らかな
膜で覆い密閉することである.第二は,開口径をアタッチメントによって調節することで
ある.以下にてそれぞれの対策案の試行結果を述べる.
2.7.1
薄膜による密閉
薄く柔軟なシリコン膜(厚さ=1.0mm,硬度=5)を用いてスピーカを密閉した装置を製作し
た.製作した装置の構造と外観を図 27 に示す.本装置を手の小さな女性や子供に使用して
もらったところ,初期の体験装置と比較してより強く触覚を感じるとの回筓が多く聞かれ
た.このことから,シリコン膜による密閉は有効であると言える.また,本施行の副次的
効果として,負圧の減衰効果が認められた.これは,シリコン膜と手掌部間が密閉されて
いないためにシリコン膜が盛りあがる際の押圧のみを強く知覚することが原因だと考えら
れる.また完全に負圧が消失しなかったのは,使用したシリコン膜が持つ粘着性のためシ
リコン膜と皮膚が部分的に密着状態となり,皮膚がシリコン膜に引っ張られたことが原因
だと思われる.このことから,負圧を知覚させたい場合は粘着性を高めた素材,逆に負圧
を知覚させたくない場合は粘着性を持たない素材とすることで柔軟に調節できると推測さ
れる.なお,この副次的効果は魅力的であるが,本章では空気漏れを対象としているため
これ以上追及しない.
上記の有効性及び副次的効果が認められた一方で,本案の欠点が 2 点発見された.1 つは
太鼓の類推から明らかであるように,シリコン膜で覆うことである種のフィルタ特性が生
30
じると推測されることである.この問題は,あらかじめ逆フィルタをかけた波形を生成す
ることで回避可能だと思われる.もう 1 つは,シリコン膜を介して圧力を知覚するためシ
リコンの質感が同時に知覚されてしまうことである.このことは,接触子の材質に依存し
ない触覚が提示できるという本手法の利点が損なわれることを意味する.この問題は,空
気圧で直接提示した場合と似通った質感を持つ素材を選択することで解決できる可能性が
ある.また,逆に言えば本解決策はアプリケーション固有のテクスチャ情報も要求される
状況において効果的であると言えるので,状況によって使い分けていくことで大きな成果
が期待できる.
Silicone sheet
Speaker
図27 シリコン膜の装着
2.7.2
アタッチメントによる開口径の変更
異なる開口径のアタッチメントを 3 種類製作した.製作したアタッチメントの直径はそ
れぞれ 30mm, 40mm, 50mm である.アタッチメントの外観を図 28 に示す.本アタッチメン
トを数人の被験者に試し,安定して触覚提示が可能であることを確認した.よって,本案
も空気漏れ対策に効果的だと言える.また,本案は空気圧による触覚提示という本手法の
特徴を保持することが可能である.
欠点としては,手のサイズを体験者毎に測定し,アタッチメントを交換するという手間
が生じてしまうこと,アタッチメントと装置本体との密閉性を保つために構造が複雑化す
ることの 2 点が挙げられる.このため,構造の簡略化や手間の軽減を考慮した設計を行う
必要がある.
31
図28 シリコン膜による密閉
2.8 波形の再現性
2.6 で製作した装置の体験時,体験者の操作や圧力提示に伴う手掌部自体の変形が度々観
察された.手掌部が変形した場合,必然的に密閉空間における体積の変化が生じるため,
再現性の高い触覚提示を行うためには体積変化を考慮する必要がある.そこで,密閉空間
内の空気圧を監視し,密閉空間内の体積変化によらず適切な圧力となるようにフィードバ
ック制御を行うことを試みた.
2.8.1
金属板で覆った場合
空気圧によるフィードバック制御を試行するにあたり,まず金属板でスピーカを覆った
場合における制御有無の比較実験を行った.実験装置は 2.5.1 にて使用した図 22 と同じも
のである.また,制御には PID 方式を用い,各パラメータのゲインは経験的に求めた.ま
た,更新周波数は 2kHz とした.提示した周波数は 1~10Hz まで 1Hz 刻み,10~100Hz まで
10Hz 刻み,100~200Hz まで 100Hz 刻みとした.制御無しの場合の振幅は 1kPa とし,1Hz
時の振幅を目標値の振幅と合わせた状態で測定を行った.
実験により測定された出力波形の位相線図とゲイン線図を図 29 ,図 30 に,制御有無の
場合それぞれの代表波形を図 29 ,図 30
にそれぞれ示す.
32
Phase lag[degree]
80
40
0
-40
-80
feedback
non-feedback
-120
1
10
100
Frequency[Hz]
1000
図29 目標値と測定値の位相線図
2.5
Magnitude[dB]
2
1.5
1
0.5
0
feedback
non-feedback
-0.5
1
10
100
Frequency[Hz]
図30 目標値と測定値のゲイン線図
33
1000
0.8
Measured
Destination
Pressure[kPa]
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
0
0.5
1
Time[s]
1.5
2
2.5
図31 1Hz 正弦波における測定結果(制御無し)
Measured
Destination
0.8
Pressure[kPa]
0.6
0.4
0.2
0
-0.2
-0.4
-0.6
0
0.5
1
Time[s]
1.5
2
2.5
図32 1Hz 正弦波における測定結果(制御有り)
結果より,制御無しの場合は低周波領域において位相ずれが大きく(最大位相ずれ
=112.9°),高周波になるほど位相が目標値に近づいた.振幅は,1Hz 時の振幅と大きく異
なったが 2Hz 以降は比較的安定した振幅を保った.なお,本実験における振幅の結果は 2.5.3
の実験結果と若干異なるように見えるが(2.5.3 の実験結果は 1Hz 時から安定していた),本
実験ではアンプ増幅後の値を揃えたのではなく指令値を一定にしたため,1Hz 時の振幅の違
いはアンプの特性によるものであると考えられる.以上から,制御無しの場合はスピーカ
やアンプの特性が大きく影響し,特に低周波領域における位相や振幅のずれが問題となる
ことが分かった.
一方制御有りの場合,位相ずれは大幅に減尐し出力振幅も目標振幅に対して非常に近い
値で安定した.特に低周波における安定性は制御無し場合を大きく上回った.しかし,周
34
波数が高くなるにつれて不安定になり,特に位相ずれが顕著に見られるようになった.こ
の原因として,制御の更新周波数とセンサ性能の問題が挙げられる.制御有りの場合の測
定結果を見てみると,目標値に対する時間遅れは周波数によらず 1ms 前後であった.今回,
制御の更新周波数は 2kHz であることから,時間遅れの値はこの更新周波数に起因するもの
と思われる.よって,更新周波数を高めることで高周波特性が改善されると考えられる.
制御有りの場合では更に,高周波と低周波が交互に出力される波形(人間の鼓動を模した
もの)を用いた実験も行った.その結果,この場合においても安定して目標波形に追随して
いることを確認した(図 33 ).
Measured
Destination
1.2
Pressure[kPa]
1
0.8
0.6
0.4
0.2
0
-0.2
0
0.1
0.2
Time[s]
0.3
0.4
0.5
図33 鼓動運動の波形を用いた測定結果(制御有り)
2.8.2
手掌部で覆った場合
次に,実際に手掌部を用いた場合における制御有無の比較実験を行った.実験装置には,
2.7.2 で述べたアタッチメント(開口径=40mm)に空気圧センサを取り付けたものを使用した
(図 34 ).制御方式,更新周波数は前回と同様である.
図34 実験装置
35
正弦波による実験の結果,2.8.1 の結果と同様制御有りの場合は制御無しの場合と比較し
て位相ずれが小さく,振幅も目標波形に非常に近い値を示した.
更に,密閉空間体積を大きく変化させた時の測定値の挙動についても比較した.測定時,
約 1 秒間隔で手の甲を押し込む動作を行った.また,図 33 と同様の波形を使用した.結果
を以下に示す.
1.1
Measured
Destination
Pressure[kPa]
0.9
0.7
0.5
0.3
0.1
-0.1
-0.3
0
1
2
Time[s]
3
4
5
図35 鼓動運動の波形を用いた測定結果(制御無し)
Measured
Destination
1.1
Pressure[kPa]
0.9
0.7
0.5
0.3
0.1
-0.1
-0.3
0
1
2
Time[s] 3
4
5
図36 鼓動運動の波形を用いた測定結果(制御有り)
図 35 ,図 36 より,制御無しの場合は手が押されるたびに圧力値が大きく変動したが,
制御有りの場合は手を押しても影響はほとんど見られなかった.ただし,高周波成分に関
しては制御有りの場合でも若干目標値からずれる個所が存在した.低周波成分については
36
目標値を保っていたことから,これも 2.8.1 と同様に制御の更新周波数を上げることで解決
できるものと考えられる.
以上から,通常密閉状態における空気圧によるフィードバック制御を試行し,制御有り
の方が安定して目標圧力を提示可能であることを示した.また,密閉空間内の体積が変動
する場合における空気圧フィードバック制御を試行し,通常状態と同様に制御有りの方が
安定して目標圧力を提示可能であるという結果を得た.
2.9 まとめ
本章では,本論文の目的である感性触覚コンテンツのための触覚提示手法を提案・実装
し,その有効性の検証を行った.
まず,ヒトの触覚構造と働きを概説し,本論文が対象とする触覚の知覚種類,提示部位,
時空間特性を整理した.その後,周波数帯域,空間分解能に特化した触覚ディスプレイを
それぞれ概観した.
次に,本論文で目指す感性触覚コンテンツに適した触覚ディスプレイの条件について日
常生活における触知体験や触覚を主とした製品群から導き出した.導いた条件は,空間分
解能よりも周波数帯域を重視し,比較的広い面積に余計な素材感の無い階調豊かな触覚刺
激を行うというものである.
この条件を元に,音響スピーカを用いた直接的な空気圧駆動による触覚提示手法を提案
した.本提案手法はオーディオ分野で培われてきた音響スピーカ自身が持つ広帯域性,高
高階調性と空気圧の非接触性を触覚提示に応用したものであり,大面積への提示が比較的
容易に実現できる柔軟性も併せ持つ.このことから,本論文の目的と符合する性能を持つ
触覚提示手法だと言える.更には,触覚と音声のマルチモーダル提示,正負両方の圧力提
示,小型化・低コスト化の実現など,触覚提示に関するメリットは多い.本手法について
評価実験を行った結果,周波数に寄らず 4N 以上の力が提示であることが分かり,十分な提
示強度を持つことも示された.また,本手法を実装し 1Hz~1kHz までの正弦波を出力した
結果,全ての体験者が全周波数帯域において触覚を知覚した.このことから,本手法が幅
広い周波数における触覚提示に有効であることが示された.
最後に,実用上問題となるであろう 2 点に関して解決案を試行した.1 つ目の問題は,密
閉性の確保である.本手法は手掌部とスピーカ間の空間を密閉することで成り立つ.従っ
て,密閉性が保たれなければ触覚提示に大きな影響が出る.この問題に対して 2 つの対策
案を試行した.第一の案は,薄膜でスピーカを密閉し,膜の上下動によって触覚を提示す
るというものである.第二の案は,手のサイズに合わせた開口径をアタッチメントによっ
て変更することである.それぞれの案を試行した結果,密閉性が向上させることに成功し
た.しかしながら 2 つの対策案にはそれぞれ欠点が存在する.特に薄膜を用いる案はフィ
ルタ特性及び素材感の問題があり,本手法の特徴を尐なからず減退させる.その一方で利
37
点も確かに存在することから,用途に合わせて使用していくことが望ましいと考える.
2 つ目の問題は,再現性の問題である.空気漏れが無い場合でも,手掌部の変形により空
間内体積が変化することで空気圧も変化する.この問題を是正するため,空気圧を用いた
フィードバック制御を試行した.制御の有無による波形再現性の比較を行った結果,制御
を行うことで再現性が大幅に高められることが分かった.ただし実験では,高周波帯では
再現性が下がってしまった.これは制御の更新周波数が問題であることから,今後高周波
に対応するため高い更新周波数での制御システムを導入することで解決可能だと考えられ
る.
以上から,本章では本論文の目的である感性触覚提示のための条件を満たす新たな触覚
提示手法を提案し,その有効性を示すことができた.また,幾つかの問題に対する対策を
行い,安定した触覚提示が可能な環境を整えた.しかしながらセンサ性能がボトルネック
となり,性能の全てを示せたとは言い難いという課題が残った.特に圧力フィードバック
制御はセンサの問題が性能に直結するため,現状では実践に投入することが難しい.実際,
後述する触覚コンテンツ群の実装には制御をほぼ導入していない.今後,よりロバストか
つ高品位な触覚提示を行う上では高速応筓が可能な空気圧センサの導入が欠かせないと思
われる.
38
第3章
触覚コンテンツ群の提案
本章では,触知覚特性を分類し,結果から触知覚マップを構築する.その後,構築され
たマップの各領域に対応し且つ感性情報を富に含む触覚コンテンツをそれぞれ提案する.
3.1 触知覚特性の分類
本来,感性触覚コンテンツは触覚におけるコンテンツ論の上で議論をすべきであるが,
そもそもコンテンツ自体が乏しい現状から論の構築が進んでいないのが現状である.よっ
て今は実例を積み上げることで可能性を示す時期であると言える.触覚コンテンツの実例
を考える場合,触知覚の特性を把握し,それに合わせたコンテンツの可能性を議論するこ
とが重要である.触知覚特性は主に知覚の種類,接触対象,視点の 3 項目に分類される.
・知覚の種類
皮膚による触知覚は 2.1 にて述べたように受動触知覚(触られる)と能動触知覚(触る)が存
在し,同じ触覚刺激であっても受ける印象が大きく異なる.例えば,誰かが自分の皮膚
を細い棒で刺激したのであれば,チクチクと感じると筓える.しかし,棒を触り,その
先端を感じるのであれば,棒を知覚したと報告する.この場合,前者が受動触知覚であ
り,後者が能動触知覚である.
・接触対象
触知覚は基本的に対象との接触現象によって生じる.この際,物理的な相互作用の結果
のみから生じる場合と,それ以外の要因で触覚が生じる場合が存在する.前者には布や
金属片など自ら動力を持たない素材や構造物などが該当し,接触による皮膚及び対象の
変形のみによって触覚が生じる.後者には脈動し動き回ることが可能な生物や動力を持
った製品などが該当し,卖なる接触現象による皮膚・対象の変形に加えて対象の接触動
作による相互作用から触覚が生じる.また,対象自身が接触動作を行うことにより,受
動触と能動触が同時に起こる複雑な触知覚となる.
・視点
触知覚の視点は一人称を強制し,三人称視点からも捉える事ができる視覚・聴覚と大き
く異なる.よって,触覚コンテンツはユーザ自身の主観的な体験として再現される必要
39
がある.ただし,例えばヒト同士の場合に鼓動の変化から感情を読み取ることができる
ことから,完全に一人称視点に限定することはできない.しかしながら,その場合は文
脈を理解させる必要があるなどハードルが高い.
3.2 提案する触覚コンテンツ群
3.1 で分類した触知覚特性の分類のうち,「視点」に関しては一人称の体験が大半を占め
るため軸とせず,「知覚の種類」及び「知覚対象」をそれぞれ縦軸,横軸とした二次元マッ
プを用意し,それぞれの領域を満たし且つ感性的な表現を持つ触覚コンテンツ群を提案す
る.その際,体験者の人称はコンテンツ毎に最も適するものを採用する.
本論文で提案する感性的触覚コンテンツの概要は,それぞれ以下の通りである.なお,
提案理由は各章にて述べる.
「受動触知覚・動的な対象」領域
生物が持つ「生きている」という生物的触感を生物感と定義し,これを提示する.詳
細は第 4 章で述べる.
「能動触知覚・動的な対象」領域
人間同士の触れ合いにとって重要な人肌感を遠隔スキンシップに導入する.詳細は第 5
章で述べる.
「能動触知覚・静的な対象」領域
この領域では 2 種類の触覚コンテンツを提案する.第一は,快と不快の相反する感情
を想起させるユニークな素材である粘着性粘弾性体の再現である.詳細は第 6 章で述
べる.第二は,モノを飲む際に生じる抵抗感や振動などの触覚的要素である吸飲感覚
の提示である.詳細は第 7 章で述べる.
「受動触知覚・静的な対象」領域
映像でのスロー再生と同様の効果を狙い,触覚でのスロー再生を行う.詳細は第 8 章
で述べる.
40
受動
生物感
触覚のスロー再生
動的
静的
粘着性粘弾性体感
人肌感
吸飲感覚
能動
図37 触知覚マップと提案する触覚コンテンツの配置
41
第4章
触覚コンテンツ 1:
生物感
4.1 目的
動物とのコミュニケーションは,我々に多くの癒し効果をもたらす.Vormbrock らは動物
がヒトの心臓血管系に影響を与え,感情を喚起させることを見出し,これを「ペット効果」
と名付けた[85].この効果は既にアニマルセラピーとして医療・福祉に利用され,多くの人
を元気付けている.また,動物を間近で見ることができる動物園に多くの人が訪れ,ペッ
トを家族の一員と見なすという考え方が広く定着していることからも,動物が人に与える
影響の大きさが伺い知れる.
図38 動物との触れ合う様子
42
この癒し効果に注目し,近年様々な動物を模したペットロボットが発表されてきた.中
でもファービー[86]はコミュニケーションに特化したことで注目を浴び,販売開始後 5 ヶ月
間で 200 万個を売り上げた.このロボットは,なでたり話しかけたりすることで成長し,
様々な言葉を話すなどのインタラクションが可能である.また,AIBO[87]は受け身ではな
く自律稼働するペットロボットというジャンルを確立した最初のロボットであり,ロボッ
トがペットと成り得るということを示した点で大きな功績があると言える.福祉用途とし
ては PARO[88]が登場した.このロボットは,人に安らぎや楽しみを与えるアザラシ型ロボ
ットであり,触り心地,抱き心地にこだわり,音声認識や触覚センサにより様々なインタ
ラクションが可能である.また,清潔であらねばならない病院やアレルギーを持つ人も利
用可能であることから,海外でも販売されるなど大きな成果を挙げている.他にも,猫や
魚などの動物を模したもの,昆虫を模したもの,人間を模したもの,架空のキャラクタを
模したものなど,実に多くのロボットが現在までに販売されている.これらのロボットは,
見た目の面では非常に精巧で一見本物の生物と見間違うようなものも存在する.また,動
作に関しても動物の特徴を捉えた複雑な動きを実現しつつある.しかしながら,ペットロ
ボットは,遊び相手としては機能している反面,飽きが早く,ぬいぐるみほどずっと傍ら
に置きたいという欲求が沸きにくい.
一方,ぬいぐるみは長年人間のパートナーとして傍らに置かれ,親しまれてきた.ぬい
ぐるみ卖体としては,そこに存在する以外には何もできないにも関わらず,である.
では,ロボットとぬいぐるみを分ける差は何なのだろうか.筆者はそれを触覚的なアプ
ローチの有無にあると考えた.動物とコミュニケーションをとる際,「触れ合い」という言
葉が象徴するように触れた時に受ける生物特有の触覚情報が最も重要な要素の一つである
ことは明らかである.この点において両者を比較してみると,ロボットは外観や動作は優
れているが,触る,持つ等により触れ合った瞬間,冷たく硬い機械的な部分を感じてしま
う.このことから「生きている」という実感が沸きにくく,親しみが薄れるものと推測さ
れる.一方でぬいぐるみは,卖に好みのキャラクターの外見であること以外に,触れ合っ
た際の生物に似た柔らな感触を持つため,親しみが増加するものと推測される.
以上から,
「親しみ」という感情喚起を生じさせる感性情報が生物特有の触覚の中に含ま
れていると考えられることから,これを提示することとした.
本章における目的は,親しみという感性情報を持つ生物特有の触感覚を提示することで,
機械に生物としてのリアリティと親しみやすさを付加することである.
4.2 生物感
生物感とは,文字通りその物体が生きているかのように感じる感覚情報のことを指す.
人間は,視覚,聴覚,嗅覚,触覚などを駆使してその物体が本当に生きているかどうかを
判別する.その中でも,生命の有無を判別するには 4.1 にて述べたように触覚的な情報が重
43
要なものとなってくる.触覚的な生物感とは,柔らかさ,毛並み,押されたら押し返すな
どの力覚的な抵抗感などはもちろん,心臓の鼓動や筋肉の振動,暖かさも大きな要素であ
る.前述した PARO や恐竜型ロボットの PLEO[89]等,静的な触覚に関するアプローチは徐々
に行われるようになってきた.しかしながら,毛皮の内側の機構に由来する硬さや冷たさ
を払拭しきれておらず,触覚的アプローチにはまだまだ改善の余地がある.
こうした現状の中で筆者は,
「生きている」という生体活動を最も分かりやすく表してお
り,感性表現にも適していると思われる「鼓動運動や呼吸運動の際に生じる生物特有の動
的な触覚」に注目した.呼吸・鼓動については,既に中田らがそれぞれの運動に対して個
別に実験を行い,生物感を高めることが可能であることを報告している[90].また,Yohanan
らは動物を模したロボットの感情表現として呼吸運動を取り入れた実験を行っている[91].
これらの例より,呼吸・鼓動の提示の有効性に疑いはないと考える.また,小説やコミッ
クス等において緊張の度合いを呼吸・鼓動の描写で表現するなど,心理状態を端的に表す
際にも用いることが可能だと思われる.
これらを踏まえて筆者は,個別に議論されてきた呼吸運動と鼓動運動を統合し,触覚的
な生物感として考えることで生物としてのリアリティはもちろん,感じられる生物の大き
さや印象などを調節可能な幅広い生物感の提示を行い,親しみの感情を強く喚起させる触
覚提示を目指す.以降,呼吸・鼓動運動から生じる触覚的な生物感を卖に生物感と呼ぶ.
4.3 本手法の導入
本章で筆者が扱う生物感の提示に関して,本提案手法には以下のメリットがある.
・
空気圧による“柔らかさ”の提示
生物の重要な特徴の一つとして,独特の柔らかさが挙げられる.生物は筋肉や内臓など
のしなやかで柔らかい組織を内包しており,固い毛の上からでもその柔らかさを感じ取る
ことができる.従って,柔らかいかどうかは生物か否かを判別する一つの要素と成り得る.
よって,柔らな感触を提示することで生物らしさが向上し,親しみ易さが増すものと思わ
れる.本手法は,2.6 で示したように柔らかな触感を提示できることから,生物を模倣した
触覚提示を行う上で効果的であると考えられる.
・
呼吸や鼓動運動などの様々な触覚情報に対応可能な周波数帯域
生物には,呼吸のように非常にゆっくりとした動きから鼓動のように比較的急峻な動き
まで幅広い周波数の出力が同時に存在する.また,運動などによりこれらは大きく変化す
る.よって,本手法が持つ広周波数帯域をはじめとした優れた周波数帯域は,生物が出力
する様々な周波数の触覚情報を再現する際に大きな利点であると考えられる.
44
以上から,本手法を生物感提示に用いることは有効であると考えられる.
次に,実際の有効性を実証するため,本手法を導入した触覚提示装置を製作した.製作
した装置は,触覚提示部と制御部から構成されている.触覚提示部には二組の音響スピー
カ(S.J ES-06603)の他,加速度センサ(Kionix, Inc., KXM52-1050),力センサ(Nitta Corporation,
FlexiForce A201-1)が搭載されている.これらのセンサ情報は制御部に搭載されているマイコ
ン(ルネサステクノロジ,H8 3048F)に伝達され,センサからの情報を基に波形を生成し,ア
ンプを通してスピーカに出力することが可能である.以下に装置のブロック図と触覚提示
部の外観を示す.
Handheld Part
Control Part
Value of force
Force Sensor
Acceleration
Sensor
Micro Computer
(H8 3048F)
Value of acceleration
Signal
Speaker x 2
Stereo Amplifier
(RSDA202)
図39 製作した触覚提示装置のブロック図
図40 製作した触覚提示装置の外観(触覚提示部)
45
この装置を用いて,インタラクションの仕方によってリアルタイムに出力波形を変化さ
せることを試みた.その際,生物の状態と波形が連想できるように 3 つのシナリオを考案
し,実装した.シナリオと波形の生成内容は以下の通りである.
1.
優しく抱えた場合
安定した状態を表現するため,定常的な正弦波を出力する.この際,基本波形として
2-4Hz 程度の低い正弦波を出力値する.
2.
強く押した場合
息苦しい状態を表現するため,出力振幅を小さくし,正弦波の間隔も長くする.
3.
2 の状態から力を緩めた場合
息苦しい状態から解放された際の息の荒さを表現するため,正弦波の周波数を 10Hz 程
度まで高める.また,時間と共に落ち着いてくることを表現するため,緩めた状態を
維持すると 1.の出力波形となるようにする.
1. Holding softly
Generated
signal
2. Squeezing strongly
Generated
signal
3. Loosening grip
Generated
signal
図41 インタラクションの例
46
本装置は複数の学会で実演展示された[92][93][94].その結果,多くの体験者が「生々し
さ」すら感じるほどの触感を得たと評し,本手法によって生物を想起させる柔らかな触感
が提示できる可能性が示唆された.またインタラクションを導入したことにより,2.6 で行
った卖純な正弦波刺激のみの場合と比較して,「驚いた」「楽しい」という種類の感想が多
く聞かれた.実際,多くの人が力の入れ加減や持ち方を様々に試していた様子から,楽し
さの向上を伺い知ることができた.しかしながら,インタラクションが生物感の向上に寄
与しているとは言い難く,ただ目新しい挙動に興味を示しているだけという可能性もある.
触覚の提示内容による印象の変化については Yohanan ら[91]を始め多くの研究によって明ら
かにされており,インタラクションの重要性は明白である.よって今後,生物感を向上さ
せるようなインタラクションの内容を吟味する必要があると考えられる.
4.4 提示波形の最適化
4.3 では呼吸運動と似通った波形である正弦波を用いて実験を行い,生物感の提示に本手
法が有効である可能性を見出した.そこで次に,生物的触覚の根幹である呼吸運動と鼓動
運動の統合に関する実験を 2 つ行った.1 つは,呼吸運動と鼓動運動を統合した波形の有効
性を確認する実験である.もう一つは,統合された波形の合成比率の最適化に関する実験
である.
4.4.1
実験装置
実験に先立ち,実験用の装置を製作した.本システムは 2 組の音響スピーカ(AIR WAVE,
CLW060P1),オーディオアンプ(RASTEME SYSTEMS CO., LTD. RSDA202),インタフェー
スボード(Interface Inc., PCI-3523A)および PC から構成されている.手掌部との密閉性を高め
るため,スピーカにはプラスチック製のカバーを取り付け,液体ゴムを円外周に沿って塗
布した.また,2 つのスピーカは背中合わせで配置した.波形は PC で生成し,インタフェ
ースボードからの出力した.出力された波形はアンプを介してスピーカに伝達され,皮膚
に提示される.実験装置のブロック図と外観を図 42 ,図 43 に示す.
47
図42 実験装置のブロック図
図43 実験装置の外観
4.4.2
実験 1:合成波形の選定
4.1 にて述べたように,本論文ではこれまで別々に議論されてきた呼吸と鼓動を統合して
考える.手で抱きかかえられる程度の動物ならば,呼吸運動と鼓動運動は個別に感じるも
ではなく,同時に感じるものであることが経験的に明らかであることがその理由である.
呼吸運動と鼓動運動を触覚として同時に提示することの有効性を確認するため,呼吸運動
のみによる触覚と鼓動運動のみによる触覚を合成した波形を生成し,他の波形と比較する
実験を行った.
実験に用意した提示波形は,以下の 5 通りである.
1.
鼓動運動のみによる波形 (図 44 )
48
2.
呼吸運動のみによる波形(図 45 )
3.
呼吸波形から鼓動波形を減算した波形(図 46 )
4.
呼吸波形に鼓動波形を加算した波形(図 47 )
5.
周波数の同じ正弦波(図 48 )
なお,3,4 における合成比率は予備実験によって主観的に“呼吸:鼓動=10:1”と決定
した.
図44 鼓動波形
図45 呼吸波形
49
図46 減算波形
図47 加算波形
50
図48 正弦波形
実験では, 5 種類の波形をランダムに 7 回ずつ提示し,それぞれの波形について生物感
を 1(全く生物らしくない)から 5(非常に生物らしい)までの 5 段階で評価させた.なお,各触
覚の強度を均一化するため,被験者には本実験開始の前に,調整法により主観的刺激強度
を均一化させた.実験中,被験者は閉眼し,イヤホンからホワイトノイズを提示すること
で視覚・聴覚情報を排した状態で行われた.被験者は 21~27 歳までの健康な男女 7 名であ
る.
実験の結果を以下に示す.
図49 波形の種類による評価結果
51
図 49 より,呼吸運動から鼓動成分を減算した触覚において最も評価が高く,正弦波は最
も評価が低かった.これにより,卖純な正弦波から生じる触覚よりも呼吸運動や鼓動運動
から生じる触覚の方が生物らしく知覚されることが分かった.合成波形を比較すると,呼
吸波形と鼓動波形の 2 つを有しているにも関わらず加算時と減算時で評価において差が生
じるという結果が得られた.実験後の内観報告でも加算波形は減算波形と比較して触覚を
比較し感じ難かったとの回筓が複数得られ,結果と合致した.また,鼓動運動の方向(押圧
力または吸圧力)に気づいた被験者はいなかったことから,純粋に触覚の知覚強度に関する
違いであると考えられる.では,両者の違いは何に起因するのだろうか.
筆者はこの原因として,触知覚の非線形性に着目した.一般的に,機械的な刺激によっ
て触覚を知覚するには刺激によって皮膚が変形する必要がある.そして,変形の大きさや
周波数によって我々は様々な触感を認識する.加算波形の場合を考えてみると,まず呼吸
運動に起因する圧力によって押方向へ皮膚が変形している状況がある.そこに更なる押圧
方向の圧力が鼓動波形によって提示されることとなる.この場合,皮膚が既に押されてい
るのだから皮膚変形の伸びしろは小さくなり,必然的に刺激も小さくなると思われる.一
方減算波形の場合,呼吸運動による押圧力と反対方向への力が鼓動波形によって提示され
るので,皮膚は変形し易く刺激も大きく知覚されると思われる.よって,同じ合成比率で
あっても減算波形の場合の方がより明確に刺激が感じられ,高評価に繋がったと考えられ
る.加算の場合でも鼓動波形の振幅を上げれば減算した場合と同等の効果は望めると思わ
れるが,より小さな振幅で提示可能である減算波形が最も効率的であると言える.
以上から,呼吸運動と鼓動運動の 2 つの要素を,呼吸形から鼓動波形を減算することで
合成した波形による触覚が最も効果的・効率的に生物感を提示可能であるという結果が得
られた.
4.4.3
実験 2:合成比率の最適化
4.4.2 で用いた合成波形の比率は「呼吸:鼓動=10:1」と経験的に決めていた.しかし,
この合成比率が生物感に影響を及ぼす可能性があるため,最適化する必要がある.そこで,
様々な合成比率の波形に対する生物感の強さを比較する実験を行った.使用した波形は,
呼吸強さの最大値に対する鼓動強さの最大値の比率を 1.5,3,6,12,24[%]とした 5 種類
の減算波形である.以下に合成比率が最も低い 1.5%の波形と最も合成比率が高い 24%の波
形を例として示す.なお,合成比率を変更する際に呼吸波形の振幅は固定し,鼓動波形の
振幅のみを変化させた.
52
図50 合成波形例 合成比率 1.5%
図51 合成波形例 合成比率 24%
実験では,各波形をランダムで 7 回提示し,それぞれの波形について生物感の強度を 1
~5 の 5 段階(5 が最も生物らしい)で評価させた.実験中は前実験と同様,被験者は閉眼し,
イヤホンからホワイトノイズを提示することで視覚・聴覚情報を排した状態で行われた.
被験者は 21~24 歳までの健康な男性 6 名である.
53
実験の結果を以下に示す.
図52 実験結果
図 52 より,合成比率 12%において最も高い評価となった.また,12%までは比率が増す
に従って評価が上がり,24%では逆に評価が下がったことから,10%前後の合成比率が最も
生物感を感じやすいと推測される.
以上から,4.4 では呼吸運動と鼓動運動を合成した波形を出力することでリアリティの高
い生物感を提示可能であることを示し,合成する際は呼吸波形から鼓動波形を減算した方
が最も効率的に触覚を提示することが分かった.また,合成比率 10%前後が最も生物感を
知覚しやすいことを確認した.
4.5 生物感の拡張
4.4 では「生物らしさ」に焦点を当て,高いリアリティを生み出す合成波形を求めた.次
に,より幅広い生物感の提示を行うため「想起した生物」に焦点を当てた実験を2つ行う.
第一には,提示する触覚の周期と知覚した生物の大きさの関係に関する実験である.第二
54
には,同一の触覚提示時における静的なテクスチャを組み合わせることによる印象の違い
に関する実験である.
4.5.1
実験 1:生物の大きさ知覚制御
哺乳動物における呼吸と体長との間には,以下の式で示されるような関係があることが
知られている[95].
(生物に関係する時間) ∝ (体長)3/4 =(体重)1/4
(1)
ここで,人間の呼吸周期および鼓動周期が知られていることから(呼吸周期=約 0.27Hz,
鼓動周期=約 1Hz),提示したい哺乳動物の体長もしくは体重が分かればその生物の呼吸およ
び鼓動の周期を算出し提示することができると考えられる.そこで本実験では,触覚の提
示周期と生物の大きさ知覚の関係について求める.
実験では 4.4 で求めた合成波形を基に,周期を人間の呼吸周期である 0.27Hz からネズミ
の呼吸周期である 1.47Hz まで 0.2Hz 卖位ずつ変更したものを 7 種類用意した.これらの波
形をランダムに 5 回ずつ提示し,触覚情報から推測される生物の大きさを被験者に回筓さ
せた.その際,生物の大きさの指標となる図(図 53 )を見せ,その中から選ぶという形式を
取った.提示したシルエットの図は,式(1)によって割り出した大きさの比と対応している.
なお,被験者に対しては生物の大きさと時間との関係について一切の情報を与えず,被験
者は誰一人として式の内容を知らない状態であった.実験中,被験者は閉眼し,イヤホン
からホワイトノイズを提示することで視覚・聴覚情報を排した状態で行われた.被験者は
20 代の健康な男性 5 名である.
図53 指標の図
55
実験の結果を以下に示す.
Length of body [m]
2
Theoretical value
Experimental value
1
0.5
0.25
0.125
0.07
0.57
1.07
Frequency [Hz]
1.57
図54 実験結果(周波数-伸長)
図 54 より,0.67Hz から 1.27Hz までの周波数域では理論値に極めて近い結果が得られた.
したがって,現在の実験装置では 25cm から 50cm 程度まで生物の大きさを判別させること
が可能であると言える.一方で,0.67Hz 以下および 1.27Hz 以上の周波数域における実験値
は理論値から外れている.この原因として,実験装置を抱えた際の左右の手の距離が影響
を与えている可能性があると考えられる.何故ならば,そもそも普段我々が生物の大きさ
を感じる際,皮膚感覚だけではなく体性感覚も手掛かりとしているからである.今回実験
に用いた装置は高さ 77.5mm,幅 100mm,奥行 117mm,重量 430g であった.体性感覚の影
響を考えると,理論値との差が大きくなりはじめた 500mm 付近は,実際の装置の約 5 倍で
ある.このことから,体性感覚との差が大き過ぎる場合は周波数を調整したとしても的確
な生物の大きさを提示することが難しいと思われる.次に高い周波数について見てみると,
1.57Hz の場合の想定身長は 150mm となり手の間隔である幅 100mm に近づくが,理論値と
の差は大きくなっている.これには重量が関係しているのではないかと思われる.そこで
次に,設定した周波数と体重の関係を表にまとめた.
56
表3 周波数―体重変換表
周波数 [Hz]
体重 [g]
1.47
66
1.27
118
1.07
234
0.87
538
0.67
1536
0.47
6397
0.27
60000
表 3 より,体重に関しては 0.87Hz 時が実験装置の重量と最も近く,0.87Hz から周波数が
変化するにつれて実重量との差が大きくなった.このことから,ある程度以上では重量の
影響も無視できなくなると考えられる.
以上から,体性感覚や重量に大きな差異がある場合を除き,合成波形の周波数を調節す
ることで生物の大きさ知覚を制御可能であることが分かった.
4.5.2
実験 2:生物の印象制御
生物の多くはその体の大部分を体毛や鱗,皮膚によって覆われており,これらによる静
的な触覚情報,いわゆるテクスチャ情報は生物感提示の際に印象を大きく左右すると考え
られる.実際,ペットロボットやぬいぐるみにおいて毛並みや肌触りを工夫している例が
既に多数あることからも,テクスチャ情報が持つ影響の大きさが伺い知れる.過去にテク
スチャと感情の関係を調査する研究は存在する[96].しかしながら,動的な触覚提示と同時
に提示した場合に関する研究事例はほぼ存在しない.そこで,動的な生物的触覚に対して
静的なテクスチャ情報を付与し,生物感覚提示の際に受ける印象の傾向を実験によって求
める実験を行った.テクスチャは,毛や皮などの生物を模したものから,ラバー,ウレタ
ンなど生物から乖離したものまで 12 種類を用意した.用意したテクスチャ一覧を以下に示
す.
57
毛(長)
毛(中)
毛(短)
毛(硬)
牛革
蛇皮
ベルベット
ウレタン
芝生
ラバー
エアパッキン
図55 用意したテクスチャ素材
生物感提示ではテクスチャに寄らず一定の周波数(呼吸運動=1Hz)で提示した.実験は,
通常の空気圧提示を含めて 13 種類のテクスチャをランダムに 1 回ずつ選択し,図 56 のよ
うにテクスチャを覆った上で装置を抱えるという状態で行い,1 種類のテクスチャにつき提
示触覚から受ける印象を“あたたかい”,
“やわらかい”,
“とげとげしい”,
“なまなましい”
といった生物を連想させる形容詞からなる 30 の評価項目(表 4 )について 1(全く生物らしく
ない)から 7(非常に生物らしい)までの 7 段階で回筓させた.実験中,被験者は閉眼し,イヤ
ホンからホワイトノイズを提示することで視覚・聴覚情報を排した状態で行われた.実験
は 20 代の健康な男性 9 名について行った.
58
図56 実験の様子
左,テクスチャ無し
右:テクスチャ有り
表4 使用した形容詞群
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
こわい
けがらわしい
したしみぶかい
いかつい
つめたい
うすきみわるい
どくどくしい
おぞましい
やさしい
あたたかい
かたい
やわらかい
おちついた
ひとなつこい
うれしい
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
いとしい
きもちくわるい
あいらしい
なまあたたかい
かよわい
あぶない
よわよわしい
おもしろい
おそろしい
とげとげしい
なまなましい
たのしい
あいくるしい
さみしい
かわいい
実験によって得られたデータから主成分分析を行った結果を図 57 ,表 4 に示す.主成
分分析の累積寄与率は第 1 主成分までで 67.1%,第 2 主成分までで 81.1%である.第 1 主
成分においては柔らかな毛のテクスチャを付与した場合に主成分が高く,第 2 主成分にお
いてはベルベットや蛇皮といった比較的ザラつきの強いテクスチャを付与した際に主成分
得点の絶対値が大きいことから,本稿では第 1 主成分を「柔らかさ感」
,第 2 主成分を「ザ
ラつき感」とした.
59
第2主成分
10
5 ベルベット
芝生
牛革
エアパッキン
なし
-10
-5
0
毛(短)
毛(硬)
-5 0
ラバー
蛇皮
ウレタン
毛(長)
毛( 中)
5
10
-10
第1主成分
図57 主成分分析の結果 1
表5 主成分分析の結果 2
第2主成分得点
テクスチャ 第1主成分得点
8.449162091
0.182164838
毛(長)
6.31117878
-0.138013585
毛(中)
6.229125969
0.333341836
毛(短)
0.651357765
-2.133948643
ウレタン
-1.176896316
-0.551504092
毛(硬)
-1.440881392
4.796646539
ベルベット
-1.92039419
-2.025507688
ラバー
-2.224420069
1.244666232
牛革
-2.312364513
-0.188523684
なし
-3.422966139
-3.264290918
蛇皮
-4.319601341
1.179433396
芝生
-4.823300645
0.565535769
エアパッキン
図 57 より,テクスチャを付与した場合としない状態とで主成分得点にバラつきが生じた
ことから,テクスチャの有無によって提示触覚から受ける印象が変化したと思われる.よ
って,テクスチャを付与することで同じ生物感の提示であっても任意の印象を体験者に想
起させることが可能となることが示唆された.一方.ラバーや牛革など一部のテクスチャ
については触覚から受ける印象がテクスチャ無しの場合と大きく変わらないという結果が
得られた.ところで,本提案手法の問題点として,2.7 で述べた空気漏れ問題があり,それ
60
に対して薄膜を用いて密閉するという対策案を提示した.しかしこの案では,膜の素材感
が生じるという問題があった.これに対し,本結果からラバーなど分析結果が空気圧の場
合と近しい素材を用いることができれば,空気圧を用いた場合とあまり印象を変えること
なく手掌部とスピーカとの間の密閉性を高められる可能性がある.
以上から,4.5 では提示波形の周波数を変化させることで同一の筐体であっても想起させ
る生物の大きさを錯覚させることができることを示した.また,テクスチャという静的触
覚を生物感提示に付加することで,動的な触覚提示は同一のものであってもその印象を操
作できることを示し,全体として触覚刺激の制御による幅広い生物感提示の可能性を示し
た.
4.6 実演展示
これまでの結果を基に実演展示用のプロトタイプを製作し,本コンテンツの有効性を調
査するべく実際に展示を行った.
4.6.1
プロトタイプ
実演展示にあたり,4.3 で製作した装置を更に発展させたプロトタイプを製作した.製作
したプロトタイプは, 2 つの音響スピーカ,力センサ (Nitta Corporation, FlexiForce A201-1),
加速度センサ (Kionix, Inc., KXM52-1050),マイコン(Renesas Technology Corp. SH 7125F)およ
びステレオアンプ(Strawberry Linux Co., Ltd. MAX9704 Stereo Audio Amp Kit)から構成されて
いる.触覚提示用デバイスは,提示触覚の周波数と実際の大きさによる提示生物の齟齬を
解消するため小型( 62mm×65mm×70mm)及び中型(110 mm×107mm×95mm)の 2 種類をそ
れぞれ製作した.また,触覚による生物感の提示に焦点を当てるため,デバイスの外観は
敢えて動物らしからぬ形とした.
本プロトタイプは手掌部に対して触覚提示が可能である.また,力センサと加速度セン
サの値を用い,ユーザの扱い方に応じて動的に提示波形を変化させることが可能である.
プロトタイプのブロック図および外観を図 58 ,図 59 に示す.
61
Device
Control Box
Value of Force
Force Sensor
Acceleration
Sensor
Micro
Computer
(SH 7125F)
Value of
Acceleration
Waveform
Signal
Speaker x 2
Stereo Amplifer
(MAX9704)
図58 プロトタイプのブロック図
図59 プロトタイプの概観(左:小型デバイス
4.6.2
右:中型デバイス)
提示波形とインタラクション
本プロトタイプでは,これまでの実験結果を基に呼吸波形と鼓動波形の合成波を使用し
た.また,提示用デバイスのサイズに合わせて周波数を調整した(小型デバイス=4~5Hz,
中型デバイス=2~3Hz).また,生物であることをより意識させるような複数のインタラク
ションを実装した.その際,本手法の特徴の一つである「音声とのマルチモーダル提示」
62
を活用し,触覚用の波形と音声信号を合成して出力することも取り入れた.以下に合成例
を示す.
図60 触覚情報と音声情報の合成波形
実装した内容は以下の通りである.
・
軽く持つ
落ち着いているかのように安定した呼吸・鼓動の合成波形を提示.
・
左右にデバイスを傾ける
安定した状態を崩されるため,やや緊張したかのように周波数が高まる.
・
上方向にデバイスを傾ける
喉を鳴らすかのような低周波振動を発生.
・
強く押す
威嚇するような激しい振動が発生.
・
軽く振る
楽しんでいるかのような明るい鳴き声と不規則な振動が発生.
・
激しく振る
おびえているかのような悲鳴と小刻みな振動が発生.
63
4.6.3
展示結果
筆者は,本プロトタイプを用いた実演展示を SIGGRAPH 2008[97],インタラクティブ東
京 2008[98],EC 2008[99]にて行った.その結果,多くの体験者が提示触覚の柔らかさと手
掌部全体という提示面積の広さ,そして提示波形のリアリティに関心が寄せられ,全体と
して高い評価を得ることができた.
図61 展示の様子
体験者からの意見としては,生物を手で抱いているかのように感じるというものが最も
多く,ほぼ全ての体験者から聞かれた.特に実際にペットを飼った経験のある体験者から
は,本プロトタイプによって自分のペットを思い出すといった報告が聞かれた.外観が全
く生物らしくない形をしているにも関わらずこのような感想が聞かれたとことから,本手
法によって生物を確実に想起させるほどの高いリアリティを持った生物感提示が実現でき
たと言える.また時には,
「非常に生々しく,内蔵をつかんでいるよう」といった表現も良
く聞かれ,本手法が生体的な柔らかさを十分に提示できていることの表われと言え,本手
法が有効であることの証明であると思われる.
また,小型デバイスを体験した者の多くからネズミやハムスターを抱いているようだと
の感想を,中型デバイスを体験した者の多くから犬や猫を想起したとの感想をそれぞれ得
64
られ,その逆を筓える人は皆無であった.このことから,デバイスのサイズに合わせた周
波数を設定したことによる生物の大きさ判別効果が確かめられた.
感情の喚起に関しては,ギュッと抱きしめる,キスをするなどの愛情表現があったこと
や,ずっと抱いていたいという意見も多く聞かれたことから,親しみを喚起させる何らか
の感性情報が触覚によって伝達できたのではないかと考える.
インタラクションについては,鳴き声に関する意見があった他は特に聞かれず,インタ
ラクションの内容があまり理解されていなかった様に感じられた.これは,外観が生物ら
しく無く,どう扱ったら良いか分からないままに体験したことが影響していると考えられ
る.例えば犬や猫の形をしていれば,頭を撫でる等の触れあい方が直ぐに思い起こされる.
しかし,本デバイスは円筒形や直方体であり,通常このような形の物体に対して頭を撫で
る等の行為を行うということは,発想自体が出てこない.今後インタラクションを本格的
に導入する場合は,より分かりやすい内容のものにする一方で,インタラクションが容易
な外観に変更する必要があるだろう.
以上から,4.6 では実演展示用のプロトタイプを製作し広く一般に展示を行った結果,確
かにリアリティの高い生物感という触覚コンテンツの提示に成功した.また,体験者の反
応から本コンテンツがユーザに感情を喚起させる感性情報を有していることを確認した.
一方で,同時にインタラクションに関する理解度が低いという課題が残った.
4.7 まとめ
本章では,本論文で提案した手法を用いた触覚コンテンツとして,「生物」を感じさせる
動的な触覚情報である生物感を提示し,ユーザに親しみの感情を喚起させることを試みた.
まず,その提示方法として最も「生きている」ことを表していると考えられる呼吸運動
と鼓動運動に着目し,これらを統合した波形を触覚提示用波形として使用することを提案
した.この提案の有効性を検証するため,正弦波,呼吸運動のみ,鼓動運動のみの波形と
比較し,呼吸波形と鼓動波形の合成波が最も生物らしく感じさせるということを明らかに
した.その後,最適な合成比率を求めた.これらの結果により,触覚による生物感提示の
基礎が固められた.
次に,提示波形による生物感を拡張する試みを行った.1つは,本手法最大の特徴であ
る広帯域性を利用し,上記で求めた合成波形の基本周波数を変更することで知覚される生
物の大きさを変化させることである.本川が求めた哺乳動物における時間と体長の関係[95]
から呼吸の周波数と体長の理論値を算出し提示した結果,ある程度の範囲ならば極めて理
論値通りの体長を想起させることができることが分かった.もう一つは,静的な触覚情報
であるテクスチャによる印象の操作である.実験装置をテクスチャで覆った状態で同一の
合成波を提示し,動的な触覚情報は同じでもテクスチャの種類によってその印象が大きく
変化することが分かった.また,テクスチャを用いない場合と似通った傾向を示すテクス
65
チャ素材も発見され,空気圧にて直接手掌部を刺激することが難しい状況においても,こ
のテクスチャ素材を用いることでそれと似通った触感を提示できる可能性が示唆された.
これらの結果より,触覚情報を有効に用いることで多様な生物を想起させることの可能性
が見出された.
最後に,展示活動によって生物感というコンテンツの有効性を広く世間に問う試みを行
った.これまでの結果を基に実演展示用のプロトタイプを製作し,本手法の特徴の一つで
ある音声と触覚のマルチモーダル提示を取り入れたインタラクションを実装した.展示の
結果,触覚提示によって確かに生物を想起させることを確認すると共に,周波数における
生物の大きさ知覚についても効果を確認することができた.また,体験者の反応から親し
みやそれに類する感情が本コンテンツによって喚起されていることを確認した.しかしな
がら,インタラクションに関する感想や意見は乏しく,音声以外はあまり効果がなかった
ことが今後の課題として残された.インタラクションの充実のため,デバイス形状やイン
タラクション内容の最適化が望まれる.
これらの結果から,本コンテンツは感性情報を有し,生物を十分に想起させる感覚であ
ることを示した.
生物的な触覚の中には皮膚触覚以外にも温度や力覚などの要素が存在しており,これら
の要素も生物に対する親しみを向上させる一因となることが予想される.しかしながら,
「生きている」ということを感じさせるには命の脈動たる呼吸,鼓動運動が根幹であるこ
とに間違いはないと考える.本章ではその根幹部分を提示することで,外観によらず皮膚
触覚のみで生物だと思える感覚を多くの人々に与えることができた.このことは,機械と
人間との距離を縮め,人間に安心感を与えることに大きく貢献していると思われる.今後,
より深い機械と人間との関係を構築するため,今回課題となったインタラクションを含め
て外観などの触覚的要素以外についても検討していきたい.もちろん提示波形についても,
静的な触覚情報であるテクスチャを人工的に生成し,合成波形に付加することで毛並みま
で表現するなど,更なるリアリティと広がりを追求する所存である.
66
第5章
触覚コンテンツ 2:
Skin to Skin
5.1 目的
触覚コミュニケーションを端的に表現した「スキンシップ」という言葉は,国語辞典で
以下のように記述されている.
「(親と子,教師と児童などの)肌と肌との触れ合いによる心の交流.」[100]
この記述は,対人コミュニケーションにとって触覚が相手の感情を伝え合うという役割
を担っていることを表しており,必然的に豊かな感性情報が含まれていると考えられる.
このことを裏付けるように,心の交流が重要となってくる親,兄弟,恋人など親しい間柄
の相手に対してはスキンシップの機会は必然的に増える.逆に職場や作業場では感情より
も作業内容が重要であることから,スキンシップは殆ど見られない.
図62 スキンシップの例
触覚によるバーチャルなコミュニケーションを実現することは,その目的の明確さから
多くの研究者が取り組んでいるが,その形式は主に「振動」によるものである.ComTouch[21]
67
は,五指それぞれにバイブレータとスイッチを取り付け,ボタンを押すと押した指に対応
したバイブレータが振動するという遠隔コミュニケーションシステムである.Immersion 社
は携帯電話のバイブレータを用いてメール等に振動パタンを付加して送信するシステムを
製品化している[22].これらは振動パタンという簡便な情報を利用することで遠隔コミュニ
ケーションを容易に実現している.
また,本論文の範囲ではないが「力覚」によるバーチャルコミュニケーションの研究も
盛んに行われている.石井らは 3 本のローラーを搭載したデバイスを製作し,ローラーの
挙動が遠隔地にある別のデバイスに伝達され同じように転がることで,相手がどのように
操作しているかが伝わるという装置を製作した[101].従って,互いに転がし合うことによ
りローラーを介した遠隔力覚コミュニケーションが実現できる.また稲見らはロボットの
間接にセンサとモータを埋め込み,ロボットの腕や頭を動かすとその角度どおりに遠隔置
のロボットの間接も動作し,押さえることで力覚を感じるというコミュニケーションロボ
ットを開発した[102].更には,フォースフィードバックが可能なグローブとアーム,3D 映
像を用いて遠隔値でバーチャルな握手を実現する Tangible-3D というシステムも存在する
[103].これらのシステムは実際の動作をフィードバックしていることから,振動型と比較
して現実感が高い傾向にある.
ここで触覚コミュニケーションにおいて理想的な環境を考えてみると,皮膚と皮膚が触
れ合う触感,つまり「Skin-to-Skin」を実感できることだと思われる.この環境を構築する
ためには,皮膚が持つ柔らかな質感を保ちつつ複雑な触覚を提示可能な表現力が不可欠で
ある.まず質感について見てみると,従来の触覚コミュニケーション研究は接触子の質感
に注意を払っておらず,皮膚とはほど遠い硬質感を与えてしまう構造となっている.次に
触覚の表現力について見てみると,振動型では卖純なパタンのみを使用しており,力覚型
は周波数帯域が狭い.つまり,総じて表現力不足で,触覚コミュニケーションにとって重
要な感性情報が欠落している可能性が高い.
このような現状の中で筆者は,本提案手法を用いることで「Skin-to-Skin」に近い感覚を
実現できないかと考えた.もし「Skin-to-Skin」に近い感覚を実現できれば,スキンシップ
によって生じる感性情報をより確実に伝達することができ,触覚コミュニケーションの質
が劇的に向上することが予想される.よってこれを実装することとした.
本章における目的は,
「Skin-to-Skin」に近い感覚を実現し,スキンシップで生じる感性情
報を欠落させることなく伝達することである.
5.2 本手法の導入
本章で扱う触覚コミュニケーションに関して,本提案手法は 4.3 にて述べた「柔らかさ」
「広帯域性」という利点によって「Skin-to-Skin」環境に近づくための必要条件をほぼ満た
している.更に,その他に以下のメリットを有する.
68
・
余計な質感を提示しない
本手法では空気圧による非接触な皮膚刺激を行い,アクチュエータ以外の駆動部が存在
しないことから,余計な質感を知覚することはない.よって,伝達される触覚情報に集中
することが可能である.
・
提示面積に関する柔軟な対応が可能
本手法は音響スピーカを用いており,そのサイズによって提示面積を柔軟に変更するこ
とができる.また,2.7.2 で示したように,アタッチメントの開口径によっても提示面積を
制御することができる.スキンシップは手や頬,腕など様々な部位に対して行われること
から,本手法が持つ提示面性の柔軟性は大きな利点であると言える.
以上から,本手法は「Skin-to-Skin」感覚の実現にとって有効であると考えられる.
ところで,触覚コミュニケーションの具体的な方法は大きく分けて 2 種類存在する.1 つ
は片方向型触覚コミュニケーションである.これは,センサ等で送り手の行動情報を取得
し,その情報に従って相手に触覚情報を提示するものである.もう 1 つは双方向型触覚コ
ミュニケーションである.この場合,リアルタイムで相手と触れ合うことがバーチャルに
可能となる.
図63 右:片方向型触覚コミュニケーションのイメージ
左:双方向型コミュニケーションのイメージ
本章ではこの 2 種類のうち,片方向型触覚コミュニケーションについて実装を行う.
5.2.1
スキンシップで生じる波形の計測実験
片方向型触覚コミュニケーションの実装に先立ち,実際のスキンシップで発生する波形
の記録を行った.記録には,圧力センサ(フジクラ PSM-005KPGW)が取り付けられたボック
69
スの上部をシリコンシート(株式会社ポリシス,プリンゲル PL-00 硬度 C-0)で覆った装置を
使用した.
Silicone
membrane
Air pressure
sensor
図64 触覚情報の記録
叩く,押す,擽る,撫でるという動作についてそれぞれシリコンシート上で行い,圧力
を記録した.記録した結果を以下に示す.
tap
0.3
0.3
0.2
Pressure[kPa]
Pressure[kPa]
0.1
0
0
-0.1
0.1
00
-0.1
-0.2
-0.2
-0.3
-0.3
-0.3
-0.3
0
0
0.5
1
1.5
Time[s]
2.02
tickle
0.3
0.3
0
0
0.5
1
1.5
2.02
1.5
2.02
Time[s]
caress
0.3
0.3
0.2
0.2
Pressure[kPa]
Pressure[kPa]
0.2
Pressure[kPa]
push
0.3
0.3
0.1
0
0
-0.1
0.1
00
-0.1
-0.2
-0.2
-0.3
-0.3
0
0
0.5
1
Time[s]
1.5
2.02
-0.3
-0.3
0
0
Time[s]
0.5
1
Time[s]
図65 ジェスチャによって生じた圧力変化
右上:突く 左上:押す
右下:擽る 左下:撫でる
70
tap
Power spectrum[kPa2/Hz]
60
50
40
30
20
10
0
0
0 10
20
40
40
Frequency[Hz]
60
50
40
30
20
10
0 10
20
40
40
Frequency[Hz]
50
40
30
20
10
0
0 10
Power spectrum[kPa2/Hz]
60
0
60
20
40
40
Frequency[Hz]
60
8080
60
8080
60
8080
caress
80
80
70
0
0
70
0
0
8080
tickle
80
80
push
80
80
70
0
Power spectrum[kPa2/Hz]
Power spectrum[kPa2/Hz]
Power spectrum[kPa2/Hz]
80
80
70
60
50
40
30
20
10
0
0
0
0 10
20
Frequency[Hz]
40
40
Frequency[Hz]
図66 ジェスチャによって生じた圧力変化の周波数解析結果
右上:突く 左上:押す
右下:擽る 左下:撫でる
周波数解析の結果より,どのジェスチャも概ね 40Hz 程度までの周波数にエネルギーが集
中していることが分かった.よって,その 10 倍にあたる 400Hz 程度のサンプルレートを基
準とすることで,自然な触覚提示が可能であると考えられる.
5.2.2
プロトタイプ
予備実験の結果を基に,片方向型触覚コミュニケーションのプロトタイプを製作した.
今回,触覚情報の提示部位を手掌部ではなく頬部に設定した.頬部はスキンシップに用い
られる場合が多く,触覚コミュニケーションに関して優位であると言える.また,頬部は
手部と比較してより親密な相手とのコミュニケーションに用いられる傾向がある.更には,
予備実験の際に行った「突く,押す,撫でる,擽る」といった多様なジェスチャによるコ
ミュニケーションは,頬部で多く行われている.以上から,高臨場触覚コミュニケーショ
ンによる心の交流という本章の目的に最も適した部位であると考えられ,頬部への提示へ
と至った.
製作したプロトタイプはジェスチャ認識部,制御部,触覚提示部から成る.ジェスチャ
の認識には,超音波距離センサ(Parallax, Inc., PING Ultrasonic Sensor)を用いた.本センサは
30cm 程度までの距離で用いる場合のサンプリングレートが約 400Hz であり,5.2.1 の結果か
ら算出した基準を満たす.制御部はマイコン(Renesas Technology Corp. SH 7125F)とアンプ
(Strawberry Linux Co., Ltd. MAX9704 Stereo Audio Amp Kit)から構成されており,ジェスチャ
認識部からの信号から出力信号を生成し,アンプを通して触覚提示部に伝達する.触覚提
71
示部には直径 4cm の小型スピーカ(AIR WAVE, CLF040P1)が装着されており,頬部に触覚を
提示する.プロトタイプのブロック図と外観を図 67 図 68 に示す.
ジェスチャ認識の部分は,5.2.1 のように圧力を記録する形式ではなく空中での手の動き
を認識する形式とした.これは,手全体の動きを検出するためである.また,他人から見
たときに何をしているのか分かり易くするという狙いもある.
Sensor Device
Ultrasonic
Distance
Sensor
Control Box
Value of
distance
Micro
Computer
(SH 7125F)
Waveform
Display Device
Stereo
Amplifer
(MAX9704)
Signal
Speaker
図67 プロトタイプのブロック図
Senser device
Display device
図68 プロトタイプの外観
72
5.2.3
提示波形とインタラクション
本プロトタイプでは,ジェスチャ認識部で得た情報をほぼリアルタイムに出力すること
が可能である.インタラクションの流れは以下の通りである.
・ジェスチャ認識部の前で,手を用いたジェスチャ動作を行う
・ジェスチャ動作によって起こるセンサと手の距離を認識し,制御部に伝達
・距離情報を電圧値に変換して出力
本プロトタイプでは,ジェスチャ側と触覚受信側で別れて体験することはもちろん,自
分自身ジェスチャし,それを触覚として感じることも可能である.
recognize distance
between hand and sensor
Convert distance data to
amplitude data
図69 触覚情報の記録
5.2.4
展示結果
筆者は製作したプロトタイプ実演展示を SIGGRAPH2008[97],インタラクティブ東京
2008[98]において行った.展示では多くの体験者が頬への触覚提示の妥当性とジェスチャと
触覚刺激の整合性を評価し,好評を博す結果となった.また,カップルや夫婦など,親し
い間柄同士での体験では特に大きな盛り上りが見られた.このことは,触覚による心の交
流に関して本プロトタイプが有効であること示すと共に,提示された触覚が感性情報を保
持していたことを強く示唆している.では,
「Skin-to-Skin」の感覚は実現できたのだろうか.
「Skin-to-Skin」は,皮膚が持つ柔らかな質感を保ちつつ複雑な触覚を提示可能な表現力に
よって成り立つと述べた.質感に関しては,多くの体験者が触覚刺激の内容に集中し,刺
激自体の質感に対して違和感や不満を訴えることは皆無であった.また,優しく触られて
いる印象を比較的多くの体験者が共通して感じていた.よって,尐なくとも柔らかな触感
73
によって皮膚が持つ柔らかさを提示することに成功し,体験を阻害しないレベルの質感は
保ったことが伺える.ただし,急峻な動作に対する刺激が弱いという意見が聞かれた.触
覚刺激の内容に関しては,「突く,擽る,撫でる」という動作の違いは比較的多くの体験者
が理解してそれぞれに対する触感の違いを楽しんでいる様子が見て取れた.よって,本プ
ロトタイプはジェスチャをある程度正しく頬に伝達できるものと考えられる.以上から,
Skin to Skin の感覚はある程度実現できたと言え,急峻な動作,強い刺激の伝達はまだ難し
いものの,最初期のプロトタイプとしては十分な成果であると考える.
他に興味深い点として,今回触覚の提示部位を頬部に設定したことで,殆どの体験者が
携帯電話との組み合わせを連想していたことが挙げられる.頬部は耳部の延長上にありつ
つも通話を邪魔することは無い.また,普段携帯電話で通話する際には必然的に頬と携帯
電話が接触した状態となるため,余分な動作をする必要がない.よって,触覚コミュニケ
ーションが実用化されるに当たり,頬部に触覚を提示するということのは適当な選択肢で
あると言える.
図70 展示の様子
このように高い評価と将来性が見出された一方,問題点も生じた.最も問題となったこ
とは,センサの誤検出の多さである.本装置では超音波センサを用いたが,高速なサンプ
リングレートに設定したため遠くから反射した超音波も拾ってしまう場合が多々見受けら
れた.これは,設置の工夫やホーンを装着することである程度回避できたが,誤検出を完
74
全に無くすことはできていない.また,頬部とスピーカ間を確実に密閉することが思いの
外難しいことである.特に頬骨や髭が密閉を阻害する場合が多く見受けられた.形状や当
て方を工夫する,ゲル等を用いたクッションを挟むなどことなどで解決したいと考える.
以上から,頬に触覚を提示する形式の触覚コミュニケーションシステムの製作・展示を
行った結果,ある程度ジェスチャに沿った触感を伝達することに成功し,より直観的な触
覚コミュニケーションを可能とした.しかしながら,センサの誤検出や密閉性確保という
課題が残った.
5.3 まとめ
本章では,本提案手法を用いた触覚コンテンツとして「Skin-to-Skin」に近しい感覚の再
現を通してスキンシップの中に含まれる感性情報を伝達することを試みた.
まず,触覚コミュニケーションにとって理想的な環境を「Skin-to-Skin」を実感可能な環
境であると定義し,必要な要素を 2 点挙げた.第一は皮膚が持つ柔らかな質感である.第
二は複雑な触覚を提示可能な表現力である.これらの要素を基準として従来研究の問題点
を整理し,本提案手法によって 2 点を満たし,さらに「余計な質感を提示しない」「提示面
積に関する柔軟な対応が可能」という 2 点の利点を説明した.
次に本提案手法を用いたプロトタイプの製作を行った.まず触覚コミュニケーションに
とって基準となるサンプリングレートを実験から算出し,その後ジェスチャ認識部に超音
波センサを,提示部位に頬部をそれぞれ設定したプロトタイプを製作するという手順で行
った.
最後に,実演展示によって本コンテンツの有効性を広く世間に問う試みを行った.展示
の結果,特に親しい間柄同士での体験では大きな盛り上がりを見せ,本コンテンツの有効
性が示されたと共に,提示された触覚に感性情報が多分に含まれることが強く示唆された.
また,皮膚が持つ柔らかさと複数のジェスチャを確実に伝達できたことから,
「Skin-to-Skin」
に近い感覚をある程度実現できた.さらには,将来的な展開として携帯電話との組み合わ
せを考えた場合,頬部の提示が非常に大きな利点となることを見出した.しかしながら,
センサの後検出や頬部における密閉性確保の困難さという問題点が表出し,今後の課題と
して残された.
本論文では片方向型触覚コミュニケーションを扱った.片方向触覚コミュニケーション
の場合,触覚を送信する側と受信する側で別れるため,本来は「受動触知覚」に分類され
る.しかしながら,今回製作したプロトタイプは自分でジェスチャ部分も担当可能であり,
オプタコン等の例にあるように読み取り部と提示部の位置が異なっていても能動的な触知
覚と認識することから,自分でジェスチャ部分も担当した場合に限り能動触知覚と言うこ
とができる.よって今回は結果的に能動触知覚領域を含む形となり,触知マップとの整合
性が保たれた.しかしながら,自分でジェスチャ部分を担当することは本来の使い方とは
75
異なるため,今後は受信側と送信側にはっきりと分けた設計をする必要がある.
また,触覚コミュニケーションには 5.2 で述べたように双方向型触覚コミュニケーション
も存在し,こちらの方が一般的であると思われる.なぜならば触覚は,触れると同時に触
れられるという両面の特性を持つからである.また,多くの研究が双方向型であるという
現実もある.本プロトタイプは,触られる側については目標である「Skin-to-Skin」環境に
近づけたと思われるが,ジェスチャ側には触覚を何も提示していないため,ジェスチャ側
に対する現実感の乏さは否めない.しかしながら,触覚コミュニケーションにとって理想
的な環境の構築から出発し,本提案手法によって「Skin-to-Skin」の実現を目指すという従
来研究にはない独自のアプローチを取ることで,触体験自体の質感向上と感性情報の伝達
の可能性を示すことはできたと思われる.
映像や音声によるコミュニケーションの充実により,触覚によるコミュニケーションに
対する受容は近年非常に高まっている.今後,本章の成果を基にさらなる装置の改良や双
方向型の製作を行い,
「Skin-to-Skin」にさらに近づき,より多くの感性情報を伝達したいと
考える.
76
第6章
触覚コンテンツ 3:
粘着性粘弾性感
6.1 目的
我々は,雲の動き,水の流れなど,自然現象の中に様々な感動を見出している.自然現
象とは自然界の様々な物理現象が複雑に絡み合って発生する現象である.よって,この物
理現象をリアルに再現できれば,自然現象の場合と同様に感動を呼び起こすことが可能で
あ る と 考 えら れ る .視 覚 や 聴覚 分 野 では 早 くか ら こ の 効果 に 着 目し , PhysX[104] や
Havok[105]等,比較的手軽に利用可能な物理エンジンが登場すると共にこれらを用いたリア
ルな現象の再現を効果的に用いた映画やゲーム等が登場している[106][107][108][109].
嗅覚や味覚についても,既に香りの要素や味の要素を抽出・合成することで「~の香り」
「~風味」を実現した商品が一般に広く普及している[110][111].
力覚の再現に関してはまだ研究段階のものが多いが確実に進歩しており,据え置き型で
は PHANToM[55][56],HapticMaster[112],HIRO[115] SmartTool[113][114],SPIDAR[73]など,
装着型では HapticGEAR[116],WearableMastr[117],CyberGrasp[118]など多種多様な力覚提示
装置が既に開発されている.また,リアリティの向上を目指し,動的な力覚を正確に提示
するための新たな手法[119]や,高周波振動を付加することで物体との衝突時における素材
感の提示手法[120]の提案もなされている.
また,従来とは異なる新たなアプローチによる力覚提示を試みた研究も近年登場してい
る.藤田らや单澤らは指をベルトで締め付けることにより重量や感性質量を疑似錯覚させ,
空の箱に物体が入っているような感覚を提示することに成功している[121][122].また,関
口らは箱の中に物体あるという設定でその挙動をシミュレートし,箱を振る動作に合わせ
て箱の側壁に衝撃を与え,物体の内在感を提示する試みを行っている[123].
77
図71 SPIDAR[73]
図72 GravityGrabber[122]
図73 Haptic Interface Using “Estimation of Box Contents” Metaphor [123]
78
本論文が対象としている触覚の分野では,2.2.2 で述べたように「手触り」に関して機械
受容器を刺激することでリアルな提示を目指した研究が複数存在する.また,素材の特性
に合わせた温度提示を行うことにより,金属や木などの素材感を提示可能とした研究も行
われている[124].しかしながら,これら全ての研究は素材の表面テクスチャに関するリア
リティもしくは布のような薄い素材のみを扱っており,物性の再現には至っていない.ま
た,素材の識別のみに焦点を当てた研究が多く,素材が持つ感性要素にまで議論が及んで
いない.
このような現状の中で筆者は,素材のなかでも感性情報を多分に含むと思われる素材に
着目した再現を行うことで,卖なるテクスチャ感以上の触感を体験することが可能ではな
いかと考え,これを実装することとした.
本章における目的は,感性情報を多分に含む素材に関してその触感の再現を行い,卖な
る素材感を超えた触感の提示を行うことである.
6.2 粘着性年弾性体とのインタラクション
本章にて素材の触感を再現するにあたり,筆者はスライムに代表される粘着性粘弾性体
を取り上げることとした.粘着性粘弾性体はその独自の質感から,心地よさ(快)と気持ち悪
さ(不快)の両面をユーザに想起させる稀有な素材である.この特性は,本章の主旨である「感
性情報を多分に含む素材」と見事に合致する.
では,本手法を用いて粘着性粘弾性体の再現は可能だろうか.この疑問に対する筓えは,
触覚及び力覚提示に関する過去の研究から導くことができる.まず,粘着性粘弾性体から
知覚される触感を分解すると,
粘着性粘弾性体=粘着感(張り付き感)+粘弾性感(ぐにゃぐにゃ感)
となる.分解された粘着感と粘弾性感は,触覚又は力覚によってそれぞれ過去に再現され
ている.粘着感については,山本らが真空吸引圧を用いて粘着力を表現する試みを行って
おり,複数の細かい穴から制御された吸引圧を皮膚に提示することで粘着テープのような
張り付き感を指に提示することに成功している[84].粘弾性感については,古くから力覚デ
ィスプレイでの再現に関する研究が行われており,近年は本間らがハサミやノコギリでの
切断という状況下で粘弾性体の切断モーメントを算出し,力覚ディスプレイによってリア
ルタイムに再現する[125][126]など,多くの成功例が存在する.
79
図74 粘着感提示デバイス[84]
図75 ハサミ型ディスプレイ[125]
図76 ノコギリ型ディスプレイ[126]
80
以上から,本章が目指す粘着性粘弾性体の触感とは,触覚によって再現される感覚と力
覚によって再現される感覚を統合したものであると言える.
これに対して本提案手法は,負圧(吸引圧)の提示が可能であることから,粘着感の提示が
可能であると推測される.また,4N 程度の力を 1Hz 以下の圧覚領域でも安定的に提示出来
ることから,弱いながらも“力覚”を提示することも可能であると思われる.よって,本
手法は粘弾性体のような柔軟な素材を再現できる可能性が十分にあると考える.
6.3 本提案手法の導入
本節では,本提案手法を用いた具体的な粘着性粘弾性感を提示するための実験,実装及
び展示結果について述べる.
6.3.1
現象の確認
粘弾性体の性質を表すためのモデルは幾つかあり,マクスウェルモデル,ケルビン・フ
ォークトモデル,標準線形固体 (SLS) モデル等が存在する.しかしながら適用可能な条件
が限られていること,粘着性について考慮されていないことなどから本実装に適用し難い.
よって,実際に粘着性粘弾性体であるスライム(オメガハウス)の挙動を調べ,それに沿った
提示を行うこととした.
スライムの挙動を記録する装置はスライドボリューム(825W-50KB B カーブ),ロードセル
(KYOWA,LMA-A-5N),インタフェースボード(Interface,PCI-3523),PC から構成されてい
る.ロードセルの上にはアルミプレートが設置されており,ここにスライムを配置する.
アルミプレートの重量をオフセットとすることで,正負両方の力を測定可能とした.スラ
イドボリュームにはアクリルプレートが取り付けられており,このプレートを上下させた
際にスライムが提示する力の変化を測定した.実験では,アクリルプレートの上下動を約 1
秒間隔で行った.
81
Slider volume
Acrylic plate
Slime
Load cell
図77 実験装置
300
Pressure
18
Displacement of plate
16
Force[gf]
Pressure[N]
200
14
12
100
10
剥離点
0
8
6
接触点
-100
4
2
-200
1
-300
0
0.1
2
0.2
3
0.3
4
0.4
Time[s]
Time[s]
0.5
0
5
0.6
-2
two plate[mm]
between from
Distance Distance
baseplate[mm]
記録した結果を以下に示す.
0.7
図78 スライムの挙動
図 78 より,プレートがスライムと接触してから剥離するまでに,以下の段階を踏むこと
が分かった.
82
1.
接触してから最下点まで:反力が線形に上昇
2.
静止状態:一度反力が下がった後,安定
3.
上昇し始め,一定速度での上昇:逆方向の反力が急上昇
4.
上昇速度の増加.剥離開始:逆反力が減尐
5.
剥離:若干の振動の後力はゼロに収束
以上より,この傾向に沿うように圧力を提示することで,スライム感が提示可能だと思
われる.
6.3.2
設計
プロトタイプの製作に当たり,体験者はデバイスを動作させ,それに合わせて図 78 と似
通った反力を提示するというインタラクションを導入した.また,映像や音声と組み合わ
せたマルチモーダルな触覚提示を行うこととした.なぜならば,卖純なものや定常的な刺
激ならば触覚のみでも状況が把握できるが,動作を伴うような複雑な現象の場合,触覚の
みでは状況が把握できない可能性が高いためである.ただし,触覚以外の感覚でリアリテ
ィが決まることを避けるため,映像は敢えてデフォルメされた手書きの絵を表示し,コマ
数を制限したパラパラ漫画状態とした.また,音声も状況把握に必要な場面(スライムと接
触した場合など)において便宜的に効果音を提示するのみとした.
6.3.3
プロトタイプ
製作したプロトタイプは,アクチュエータとして音響スピーカ(AIR WAVE, CLW060P1)を
搭載した光学式マウス(BUFFALO INC., BOMU-RHW01),LCD ディスプレイ,音響ユニット,
制御用マイコン(Renesas Technology Corp. SH 7125F),アンプ(Strawberry Linux Co., Ltd.
MAX9704 Stereo Audio Amp Kit),PC から構成されている(図 79 図 80 ).体験者はマウスの
上部に搭載されているスピーカの上に手掌部を乗せ,横方向に動作させる.マウスの動き
は PC で認識し,動作に合わせて触覚・聴覚・視覚を提示する.視覚提示に使用した画像の
中では,中央に赤いボールを,左端に粘着性粘弾性体であるスライムの面をそれぞれ描い
た(図 81 ).中央の円はマウス型デバイスの位置を表しており,マウスの動作に合わせてボ
ールが左右に移動する.
83
Display Part
Control Part
Value of Position
Optical mouse
PC
Audio Signal
Waveform
Data
Speaker Unit
Visual Signal
Control Box
LCD Display
Micro Computer
(SH 7125F)
Waveform
Signal
Stereo Amplifer
(MAX9704)
Speaker
図79 プロトタイプのブロック図
LCD display
Speaker unit
Tactile display device
図80 プロトタイプの外観
84
図81 使用した絵の例
実際のインタラクションは以下のような流れで行う.
1.
ボールを左に移動させる:触覚・聴覚は提示されない.マウスの動作に合わせてボー
ルが移動する様子が LCD ディスプレイに表示される.
2.
ボールが左側のスライム面に接触:接触を知らせる効果音が提示される.
3.
ボールを左右に移動させる:
A) 接触面よりも左側に移動させる:手掌部に押圧力が提示されると共にスライムが
凹んだような絵が表示される.
B) 接触面よりも右側に移動させる:手掌部に吸圧力が提示されると共に,スライム
がボールに張り付いて伸びているような絵が表示される.また,
「キリキリ」とい
う効果音も提示される.
4.
ボールを大きく右側に移動させる:手掌部に振動が提示されると共に,スライムが剥
離するような絵が表示される.また,剥離を知らせる効果音が提示される.
85
2.
1.
3. A
3. B
4.
図82 インタラクションの流れ
波形の出力は,音響スピーカの特性を利用した制御を行った.音響スピーカは卖位時間
あたりに電圧差生じた場合に動作を行う.そして,電圧差が生じない場合は自らの復元力
で元の位置にゆっくりと戻っていく,この特性を利用し,位置の変化があった場合はその
方向に合わせて線形に入力電圧を上昇あるいは減尐させた.また,停止した場合は電圧を
一定に保つことで圧力値をゼロに戻した.
86
本制御手法の有効性を確認するため,実際に 6.3.1 とほぼ同じ間隔でマウス型デバイスを
動作させた場合の圧力値を計測した.結果を以下に示す.
2900
2800
DA値
2700
2600
2500
2400
2300
0
0.1
0.2
0.3
0.4
0.5
0.6
Time [S]
図83 プロトタイプで提示された圧力
図 83 より,スライムの押し込み時及び引っ張り時は記録時の傾向と似た波形が出力され
ていることが分かった.ただし,記録時における静止状態ではヒステリシスが存在し,一
度反力が下がった後ある程度のところで安定した.しかし本実験結果ではゼロに戻ってし
まった.これは,本提案手法が定常的な力を出力することができないために起きた問題で
あると考える.これは静止状態でもヒステリシスを考慮し,多尐電圧を変化させる制御ア
ルゴリズムを導入することである程度回避可能であると思われる.
6.3.4
展示
製作したプロトタイプは,SIGGRAPH2008[97]及びインタラクティブ東京 2008[98]にて実
演展示された.
体験者からは「何かグニャグニャしたものを触っているよう」
「何かが手に張り付いてい
る様に感じた」との感想が多く聞かれた.また,デフォルメされた絵とリアルな触感のギ
ャップが特に好評であった.映像と音声はリアリティを排除してあることから,粘着感及
び粘弾性体の触感を皮膚触覚で表現することができたと思われる.展示中,触覚が提示さ
れた際に思わず手を放してしまう人と,呼び掛けない限りずっと体験し続ける人がそれぞ
れ一定の割合で存在した.このことは,粘着性粘弾性体が持つ快・不快の両方の感情が表
87
出したことを示しており,本章の目標である触覚の中の感性情報を伝達することが尐なか
らず出来たと思われる.
図84 展示の様子
操作に関しては,デバイスがマウス型であっため,ほぼ全ての体験者が直観的に理解し,
スムーズに体験可能であった.また,ゲームや物理モデルを扱うアプリケーションに導入
してよりリアリティの高い CG との触覚インタラクションができないかという意見が多数
寄せられた.ゲームコントローラでは既に振動機能が標準搭載されており,過去に触覚提
示機能を備えたマウスデバイスも製品化されていることからニーズはあるため,今後検討
していく.
意図した触感の提示にある程度成功した一方,本プロトタイプはスライムの触感である
と確実に認識させるほどの提示はできず,「何となくそう思う」程度であった.これは,材
質感の提示を行っていないことが原因ではないかと考える.スライムは,触った瞬間にそ
れとわかる特殊な材質感を有しているが,この質感を機械刺激のみで提示することは現状
では困難であると思われる.可能性があるとすれば,温度変化を用いた素材感の提示であ
ろうか.この問題を解決する方法は現在のところ見つかっておらず,今後の検討課題であ
る.
88
もう一つの問題として,今回製作したプロトタイプでは運動方向と刺激方向が異なって
いたことが挙げられる.具体的には,製作したプロトタイプではデバイスを水平方向に動
かしていたのに,刺激は垂直方向に提示されていた.リアリティを追求するならば当然な
がら運動方向と刺激方向は合せる必要があるため,この問題がリアリティに大きく影響す
ると思われた.しかしながら,実際の展示では運動方向と刺激方向の齟齬に対する意見は
ほぼ無かった.この理由として,本プロトタイプの体験でも方向の補正が自動的に脳内で
行われたためだと考えられる.例えば,オプタコンでは文字の読み取り部と刺激部がそれ
ぞれ独立しているため,運動と刺激の方向はもちろん提示部位さえも異なるが,違和感な
く能動触として知覚する.今回の展示では,被験者にこのような方向マッピングが働いた
ものだと考えられる.また,映像や音声の同時提示による効率的な状況把握もスムーズな
脳内マッピングを補助したのではないかと推測される.この結果を踏まえると,正確な提
示方向や提示部位のマッチングを行わなくともある程度ならば違和感のない触知体験が可
能であり,装置の簡素化に貢献できる可能性がある.
以上から,粘着性粘弾性体であるスライムの挙動と似通った圧力の推移を再現可能なプ
ロトタイプを製作し,展示によって本手法を用いた粘着感粘弾性体の表現が可能であるこ
とを示した.また,体験者の反応から粘着性弾性体が持つ感性情報をある程度提示できた
ことを確認した.
6.4 まとめ
本章では,本論文で提案した手法の応用としてスライムの様な粘着力を持つ特殊な粘弾
性体の触感再現を行うことで,素材が持つ感性情報の提示を試みた.
まず,物理現象の再現に関して視覚,聴覚,味覚,力覚,そして本論文で扱う触覚の各
分野における先行研究をそれぞれ挙げて状況を整理した.その後,感性情報から素材を考
え,その再現を行うことで卖なる素材感を超えた触感の提示を行うことを目的とした.
今回選んだ素材は身近であり,快・不快という両面の感情を想起させる粘着性粘弾性体
であった.粘着性弾性体は触覚で再現可能な粘着感と力覚で再現可能な粘弾性感を併せ持
つことから,粘着性粘弾性体は触覚と力覚の統合感覚であると言える.
本提案手法による対象素材の再現可能性を過去の研究事例から検討した結果,十分な可
能性を見出したことから本提案手法を用いた実装を行った.実装にあたって代表的な粘着
性粘弾性体であるスライムの挙動を実測し,反力の推移に関する特徴を確認した.その後,
触覚と同時に映像と音声も提示仕様としたプロトタイプを製作した.映像と音声はインタ
ラクションにおける状況把握を補助するためのみに使用する目的から,リアリティを排除
した素材を用いた.
最後に,実演展示によって本コンテンツの有効性を広く世間に問う試みを行った.展示
の結果,多くの体験者から粘着感と粘弾性体特有の触感を思わせる感想が寄せられたこと
89
から,本コンテンツが粘着性粘弾性体の触感再現にとって有効であったことが示された.
また,体験者の反応から粘着性弾性体が持つ感性情報をある程度提示できたことを確認し
た.しかしながら,スライムの素材感を提示するには至らなかったこと,デバイスの移動
方向と触知覚方向の不一致が課題として残った.
今回,触覚と力覚の分野で別々に行われていた粘着感と粘弾性感を統合したスライムの
ような素材の再現を試みたが,他にも従来では触覚のみあるいは力覚のみで再現されてき
た感覚を組み合わせることで,これまで再現できなかった物質感が再現可能となる可能性
は大いにある.よって,今後も様々な素材の触感再現に挑戦していきたい.
90
第7章
触覚コンテンツ 4:
吸飲感覚
7.1 目的
食は,卖に栄養を補給するだけのものではなく我々の精神状態に大きく作用する重要な
感性情報の媒体でもある.我々は美味しい料理を食べることで心に安らぎと喜びを感じ,
明日への活力を得る.また,食卓を囲む人々とのコミュニケーションを円滑にする効果も
存在する.
図85 美味しい料理を食べると自然と明るい気持ちになり,会話も弾む
91
食事の際,形,色,香り,味,食感,音などの要素を知覚することで総合的に食品を味
わう.この中でも味や香りの要素は食にとって特に重要であると言われており,美味しさ
を感じる際に中心的な役割を果たしている.では,触覚についてはどうだろうか.食にお
ける触覚の役割は食感の提示である.この食感について考えてみると,実際にパリパリ,
サクサク,コリコリなど食感を表現する擬音語が数多く存在し,食品業界では日々新しい
食感を持つ商品の開発に勤しんでいる.また,そばやうどんのコシにこだわり,スパゲッ
ティはアルデンテを理想とするなど,食にとって「良い」とされている価値の中に占める
触覚の割合は意外に大きい.
食感に着目した研究としては,音情報を用いた食感増強がある[127].これは,ポテトチ
ップの湿り気具合の感じ方を,噛んだ瞬間に異なる破断音を聞かせることで制御するとい
うものである.また,筑波大の岩田らの食感呈示に関する研究[128]では食感の中の咀嚼感
に着目し,食品の力学的物性を提示するという新たな試みを行っている.製作された食感
提示システムは,食品ごとの咬合力を圧力センサで記録し,装置を用いて記録通りの圧力
値となるよう制御することで食感を提示するというものである.研究の結果,噛むことに
おいて味覚と食感の相互関係があることが解明され,食味において味覚の化学的味と食感
の物理的味が重要であることが示された.ただし,食行動は「噛む」以外にも「舐める,
啜る,飲む」など多数存在し,これらの食行動に対する触感は噛んだ場合のそれとは異な
る.
以上を踏まえて筆者は,食の楽しさと食感が持つ感性情報を最大限に引き出した食触覚
体験ができないかと考え,主な食行動の1つである「飲む(吸いこむ)」行為に着目した.一
般的に飲む行為には,それ自体に感性的要素が存在する.例えば,母乳を飲む際の触感が
赤ん坊を落ち着かせることからおしゃぶりが開発され,広く普及している.また日本酒を
飲む際,盃が口唇部に当たる際の触感や液体の流れ込み方によって酒の味や印象が大きく
変わるという逸話も存在する[129].また,「飲む(吸い込む)」行為は人間が産まれた時から
行ってきた生得的な動作の一つであり,咬む力のない乳児や咀嚼力が衰えた老人など,老
若男女,誰もが可能である.さらには,噛む動作に比べて食動作が複雑ではなく,手に次
いで触知覚が鋭敏な口唇部を活用可能であることから,触覚提示が比較的容易であると考
えられる.
以上から,
「飲む」行為に対して食感提示を行うことは実用面や感性触覚コンテンツを考
えた場合に有効であると判断し,バーチャルな飲体験を実装することとした.
本章における目的は,
「飲む」行為に対してリアリティの高い食感を提示し,飲む行為及
び食感の中に含まれる感性情報を体験可能とすることである.
7.2 「飲む」行為とストロー
我々は何かを飲む際,容器に直接口をつけること以外に飲むための道具を使う場面が多
92
い.例えば,スープの場合はスプーンを,ジュースの場合はストローを用いて飲む.中で
もストローは,「飲む」ことに特化し「飲む」というアフォーダンスを備えたデバイスであ
る.ストローは内径の太さ,全長によって必要な吸飲力が変化する.このことは,飲料の
飲み心地をある程度設計することが可能であることを意味し,飲料を飲む際に最もおいし
いと感じさせるために必要な吸飲力を研究し,ストローのサイズを設計する例が既に存在
する.また,様々な形状のストローがパーティーグッズとして市販され,ストローで様々
なものを吸いこむ遊びが特に幼尐期に頻繁に行われているなど,ストローというデバイス
が「飲む」行為の楽しさに寄与する可能性は高い.さらに,ストローを使用する際は必ず
口唇部に接触することから,口部へ触覚提示が容易である.
以上から,本章ではストローを用いた「飲む」行為に関して吸飲感覚を提示する.
7.3 吸飲感覚
ストローでシェイクを飲む際,誰もが吸飲時に強い抵抗感を感じる.また,ジュースは
スッと入り,ゼリーなどはボコボコとした触感を受ける.我々はこの触感を,噛み応えや
舌触りと同様に舌,喉,口唇部といった口全体で感じることで全体的な「味わい」の感覚
を得ている.このような食品を飲む際に知覚される触感覚を,筆者は吸飲感覚と名付けた.
次に,ストローを用いて食品を飲む際の現象を分解して考えてみる.まず,口内では吸
飲動作から口内部及びストロー内部の空気圧が低くなり,真空状態に近づく.この圧力変
化は口唇部や喉部が知覚すると考えられる.次に,食品がストロー内部を通過する際の衝
突や摩擦,発泡から振動が発生する.この振動を口唇部が知覚している.また同時に吸飲
音も発生する.前述したように,音声によって知覚される食感が変化する研究が存在する
ことから,音も食感提示にとって重要な要素であると言える.このため,吸飲音も吸飲感
覚の要素の1つとして考える.
以上から吸飲感覚の要素をまとめると,
・食品が詰まる際に発生する口内の空気圧
・食品の衝突や摩擦により発生する振動
・吸飲音
という 3 項目が挙げられる.
以上から,これらの要素を記録・再生することでリアリティの高い吸飲感覚を再現可能
であると考えられる.
93
drink
Straw
Pressure change
Sound
Vibration
Food
図86 吸飲感覚の要素
7.4 実装
リアリティの高い吸飲感覚を提示するためには,元となるデータ,各要素を再現するた
めのハードウェア及び制御手法が必要となる.以降ではまず,実際の物体をストローで吸
飲した時に発生する各要素の記録手法及びその結果を述べる.その後,要素を再現するた
めのハードウェア設計,実装及び制御手法について述べる.
7.4.1
記録手法
7.3 で定義した「ストロー内部の空気圧・振動・吸飲音」という吸飲感覚の 3 要素を記録
するため,ストローにセンサを取り付けた状態で実際に物体を吸飲する実験を行った.使
用したセンサとその装着方法は以下の通りである.
・
空気圧センサ(フジクラ XFPM-115KPAR):ストロー管内の空気圧変化を記録.ストロ
ーの横から装着.
・
マイクロフォン:吸飲時に発生する音声を記録.ストロー先端に装着.
振動成分に関しては,音声情報の中に振動成分も存在すること,20Hz 以下の低周波領域
については空気圧センサの側で記録されていると推測されることから,直接記録すること
94
は行わなかった.また,ストローは最も一般的である直径 6mm のプラスチック製ストロー
(ダイソー)を主に使用し,6mm のストローでは吸いこめない食品については直径 12mm(東
急ハンズ)を使用した.
記録装置のブロック図及び外観を以下に示す.
PC for recording data
Pressure sensor
Microphone
図87 記録装置
7.4.2
7.4.2.1
記録
記録手順
吸飲感覚の記録は,以下の手順で行った.
・
被験者が食品を吸い込み始める約 5 秒前からデータの記録を開始
・
合図と共に,被験者が食品を吸い込み動作を始める
・
吸い込み動作から約 10 秒間,被験者は何度か吸い込み動作を行い続ける
本記録実験への協力者は 22~26 歳の健康な男子 10 名だった.記録の際,取得した値の
傾向に個人差が出ることを極力さけるため,どの食品に対しても急峻に吸飲するよう指示
した.また,食品にはなるべく手を加えない状態で吸飲するようにした.
95
図88 記録の様子
7.4.2.2
記録した食品群
記録した食品群の一覧を以下に示す.
1.
2.
3.
4.
5.
6.
7.
8.
9.
10.
11.
12.
13.
14.
15.
16.
17.
18.
19.
20.
そうめん
桃
米
プリン
ヨーグルト1
ヨーグルト2
ハンバーグ
ゆで卵
コーヒーシュガー
タピオカ
消臭剤
とろろ昆布
コーヒー
水パイプ
シェイク
タルタルソース
わさびソース
チキンペースト
うずらの卵
寿司
21.
22.
23.
24.
25.
26.
27.
28.
29.
30.
31.
32.
33.
34.
35.
36.
37.
38.
39.
40.
かき氷
ケーキ
ウーロン茶
コーラ
しいたけ
なめこ
きなこ
コーヒーゼリー
黒ごま
ラーメン
ライス
カレーライス
りんご
ポップコーン
ポテトチップ
納豆
ビール1
ビール2
ビール3
綿あめ
図89 記録した食品群
96
41.
42.
43.
44.
45.
46.
47.
48.
49.
50.
51.
52.
53.
54.
55.
56.
57.
58.
59.
60.
もち
プラスチック球
シャケ
どら焼き
フォアグラ
キャビア
クッキー
マグロ
鯛
エビ
チーズ1
チーズ2
アスパラガス
シャンペン
エビ天ぷら
チョコムース
イチゴムース
赤ワイン
らせん状パスタ
スパゲッティ
7.4.2.3
記録したデータ
上述した 60 種類の食品群のうち,特徴的な波形を示した 6 種類の食品に関する圧力対時
間グラフを示す.
10
Pressure[kPa]
0
-10
-20
-30
-40
-50
0
1
2
3
4
5
6
7
8
6
7
8
9
10
Time[s]
図90 シェイク
10
Pressure[kPa]
0
-10
-20
-30
-40
-50
0
1
2
3
4
5
Time[s]
図91 もち
97
9
10
10
Pressure[kPa]
0
-10
-20
-30
-40
-50
0
1
2
3
4
5
6
7
8
9
10
6
7
8
9
10
Time[s]
図92 カレーライス
10
Pressure[kPa]
0
-10
-20
-30
-40
-50
0
1
2
3
4
5
Time[s]
図93 生卵
98
10
Pressure[kPa]
0
-10
-20
-30
-40
-50
0
1
2
3
4
5
6
7
8
9
10
6
7
8
9
10
Time[s]
図94 キャビア
10
Pressure[kPa]
0
-10
-20
-30
-40
-50
0
1
2
3
4
5
Time[s]
図95 黒ごま
記録した結果を見ると,まずシェイク及びもちは圧力の変化量が他のグラフと比較して
非常に大きく(20kPa 以上),大きな抵抗力を有していた(図 90 ,図 91 ).この記録結果と類
99
似した傾向を示した食品として,ムースやチーズ,チキンペーストなど総じて強い粘粘性
特性を持つ食品が挙げられた.
次にカレーライス及び生卵は,圧力値の起伏の多さが際立つ結果であった(図 92 ,図 93 ).
これは,物性の異なる素材が混合されていたこと(カレーライス:米とルー,生卵:黄身と
白身),粒子が比較的大きいため詰まり易かったことが主な原因だと考えられる.また,粘
弾性特性を備えている.この記録結果と類似傾向を示した食品として納豆,ラーメン,ゼ
リーなどが挙げられた.これらはカレーライスや生卵と同様に比較的粒子が大きい食品又
は物性の異なる素材が混合された食品であった.
最後にキャビア及び黒ゴマは,圧力値に多尐の高周波成分が見受けられるものの,ほと
んど変化がなかった(図 94 ,図 95 ).これは,粒子が小さすぎる若しくは軽過ぎるためスト
ローに詰まることもあまりなく吸い込めてしまったことが原因だと考えられる.また,粘
弾性特性はほとんど有していない.この結果と似たような傾向を示した食品としてフレー
ク,ポップコーン,きな粉などが挙げられた.
同じように他のデータに対しても空気圧の傾向から分類すると,似通った傾向をしめす
食品群があり,大まかに上記の 3 つの食品群に分類することが推測可能であった.この推
測は,後述する実験にて検証する.
7.4.3
実装
7.4.3.1
設計指針
吸飲感覚を提示する装置を製作するに当たり,以下の設計指針を立てた.
・吸飲感覚の要素の提示
本章にて定義した吸飲感覚の 3 要素を確実に提示可能な機構とする.
・小型・軽量化
機構を簡素化することで,子供でも持てる程度の小型・軽量な装置とする.
・衛生面の配慮
口部を用いた体験を多くの人に対して行うため,衛生面には最大限配慮する.
・装置自体に,「飲む」というアフォーダンスを持たせた外観
装置自体にアフォーダンスを持たせ,自然な体験へ誘導する.
7.4.3.2
再生装置
上述した設計指針を基に,吸飲感覚の再生装置として Straw-like User Interface(以下 SUI)
と名付けた装置を製作した.SUI の外観と内部構造及びシステム構成を図 96 ,図 97 ,図
98 に示す.
100
図96 左:Straw-like User Interface の外観
Straw
Speaker
Air pressure
sensor
Solenoid
Servomotor
Valve
Cam disk
図97 SUI の内部構造
101
Straw-like User
Interface
Motor control circuit
Solenoid
R/C
servomotor
Microcomputer board
PC
H8/3052F
Pressure sensor
amplifier
Speaker
External speaker
図98 システム構成
SUI は,圧力センサ(フジクラ XFPM-115KPAR),弁,弁を制御するソレノイド,R/C サー
ボ(ヨシオカモデル Atom49),カム,スピーカから構成されている.また,使用するストロ
ーにはプラスチック製で直径 6[mm]の,最も一般的なストローを使用した.衛生面での問題
を考慮し,ストローは体験者毎に交換可能な構造とした.
SUI を制御する制御部は,H8 マイコンボード(ルネサステクノロジ,H8 3052F),ソレノ
イド駆動回路(TOSHIBA TA8429H),アンプ装置(FLING MOLE DAD-M1)から構成されている.
軽量化のため制御部は SUI に内蔵させず,制御信号のやり取りや電源供給を VGA ケーブル
で行う方式とした.
SUI では口内の空気圧を提示し,口唇部に振動を伝達する機能を実装した.また,吸飲感
覚 3 要素の 1 つである音に関しては,音質を高めるため別途外部スピーカを用意し,SUI
の動作に合わせて出力する方式とした.
空気圧はストローの先に取り付けてある弁の開閉をソレノイドと RC サーボの組み合わ
せによって行い,記録した圧力パタンとなるよう制御することで生成する構造とした.ソ
レノイドと RC サーボはそれぞれ高周波(100Hz 程度まで),低周波(20Hz 程度まで)を担当し
ている.空気圧の高周波成分は,ソレノイドによる弁の開閉周期を制御することで再現す
る.また,全体的な空気圧の推移はサーボに取り付けられたカムによって弁とストロー間
の隙間を制御することで行う.
SUI は吸飲感覚の記録と再生を目指して製作された.よって,記録時の条件であった急峻
な吸い込み動作における食品の吸飲感覚を提示することを目指す.
102
ソレノイド
空気の流れ
弁が開いているとき
弁
弁が閉じているとき
図99 ソレノイドの動作
サーボ
モータ
カム
隙間の幅が変化
弁
図100 RC サーボの動作
振動は音響スピーカをストローに密着させた状態で振動させ,提示した.この時用いて
いるのは,記録した音声データである.
7.4.4
制御手法
7.4.4.1
空気圧
7.4.2 にて記録したデータを見たところ,
「吸飲始め」
「吸飲途中」
「吸飲終わり」において
それぞれ大きな特徴を持つことが分かった.よって空気圧の提示では,吸飲始めから終わ
りまでの区間を3つのステージに分け,それぞれについて記録したデータから SUI に最適
化したパラメータを作成し,そのパラメータに従って装置を制御するというシーケンス制
御を行うこととした.これは,岩田らの食感提示装置に関する研究[128]と同様の手法であ
る.
103
第一ステージ
第二ステージ
第三ステージ
10
0
Pressure[kPa]
-10
-20
-30
-40
-50
0
0.2
0.4
0.6
0.8
1
Time[s]
図101 吸飲感覚のステージ分け(シェイクの記録データを使用)
7.4.4.2
振動・音声
振動及び音声の提示では,7.4.2 にて記録したデータに対して音量調整やノイズ低減処理
をしたものを使用した.提示方法は空気圧の提示と同様,3 つのステージにそれぞれ音声フ
ァイルを分け,吸飲感覚のステージ毎にファイルを切り替えて出力した.音声の編集には
Sound Engine(Cycle of 5th)を使用した.
7.4.5
評価実験
吸飲感覚再現のために記録したデータは,空気圧と吸飲音の 2 点である.この内,吸飲
音に関しては記録したデータそのものを使用しているため,再現性は十分であると言える.
よって,空気圧について記録値と提示値を比較し,再現性を検証する実験を行った.実験
対象の食品は,それぞれ大きく特徴が異なる生卵・キャビア・シェイクの 3 種類である.
実験ではまず,実際に食品を吸飲してストロー管内の圧力を測定した.次に,SUI にて食
感提示を行い,その際のストロー内の圧力を測定した.各測定時,被験者には急峻に吸飲
するよう指示した.SUI での吸飲感覚提示では,被験者の吸飲力によらず一定時間で感覚提
示を行った.使用した実験装置は,7.4.2 にて使用した装置と同じものである.
実験結果を以下に示す.
104
10
5
5
0
0
Pressure [kPa]
Pressure [kPa]
10
-5
-10
-15
-5
-10
-15
-20
-20
-25
-25
-30
-30
0
0.4
0.8
1.2
1.6
0
0.4
10
10
0
0
-10
-20
-30
-40
1.2
-10
-20
-30
-40
-50
-50
0
0.2
0.4
0.6
0.8
1
0.0
0.5
Time [s]
1.0
1.5
2.0
1.5
2.0
Time [s]
10
10
5
5
0
0
Pressure [kPa]
Pressure [kPa]
0.8
Time [s]
Pressure [kPa]
Pressure [kPa]
Time [s]
-5
-10
-15
-20
-25
-5
-10
-15
-20
-25
-30
-30
0
2
4
6
0.0
0.5
Time [s]
1.0
Time [s]
図102 実験結果
左上:生卵(食品)
右上(再現)
左中:シェイク(食品) 右中:シェイク(再現)
左下:キャビア(食品) 右下:キャビア(再現)
図 102 より,異なる特徴を持った 3 種類の食品について,ある程度再現性のある提示を
行うことができた.7.4.2 で考察したように,他の食品についてもこの 3 種類のいずれかと
似通った特徴を有していることから,他の様々な食品に対してもリアリティのある感覚提
示が可能であると考えられる.
105
7.4.6
展示
製作した装置の再現能力が確認されたことを受け,実演展示によって広く一般に本提案
の有効性を問う試みを行った.
7.4.6.1
展示システム
製作した体験システムの概要は,以下に集約される.
・複数の食品群の中から,好みの食品を選択する
・SUI を用いて吸い込み,選択した食品の吸飲感覚を味わう
上記の概要に沿った上で,シチュエーションや使用可能な機材,スペース,対象年齢な
どから 3 種類の様式を製作した.
・
様式 1
様式 1 では,食品を背負って動き回っているキャラクタを SUI で捕らえ,吸い込むとい
うインタラクションを実装した.本様式ではキャラクタは常にスクリーン内を動き回って
おり,キャラクタを追いかけて捕まえるというゲーム性を有している.
図103 展示様式 1 の外観と体験の様子
106
図104 展示様式 1 の体験風景
本様式では,リアプロジェクションによる映像投影と赤外 LED 及び IR フィルタ付 CCD
カメラによるデバイスのトラッキングを行った.具体的には,リアプロジェクションスク
リーンの四隅と SUI の底面にそれぞれ赤外 LED を取り付け,スクリーン下部からカメラで
撮影し,LED 光の位置関係からスクリーン上での SUI の座標を毎フレームごとに算出した.
SUI
赤外LED
スクリーン
SUIの光
CCDカメラの
映像
ミラー
CCDカメラ
(IRフィルタ付)
図105 トラッキング手法
107
・
様式 2
様式 2 では,タッチパネルに表示されている食品群の中から体験したいものをタッチす
ることで選択し,SUI で吸い込むインタラクションを実装した.本様式では,体験者は食品
の画像を見ながら吸飲感覚を味わうことが可能である.
図106 展示様式 2 の外観
図107 画面構成(通常時)
108
図108 画面構成(食品選択後)
図109 展示様式 2 の体験風景
109
・様式 3
様式 3 では,食品の画像がプリントされた複数の円盤の中から体験したいものを皿の上
に載せ,更にその上に SUI を乗せて吸い込むというインタラクションを実装した.円盤の
認識には RFID リーダーとタグを用い,皿の下に RFID リーダーを,円盤の中に RFID タグ
をそれぞれ埋め込んだ.
図110 展示様式 3 の外観
図111 展示様式 3
110
7.4.6.2
展示結果
筆者は現在までに,国内外にて数多くの実演展示を行ってきた.これまでの展示実績を
以下に示す.
表6 これまでの展示実績
国内展示実績
2004 年
第12回 国際学生対抗
10 月
バーチャルリアリティコンテスト
2005 年
8月
2005 年
12 月
2006 年
3月
インタラクティブ東京 2005
デジタルアートフェスティバル 2005
第 9 回文化庁メディア芸術祭
海外展示実績
2005 年
4月
2005 年
8月
2005 年
9月
2006 年
6月
2006 年
9月
2008 年
6月
Laval Virtual 2005
SIGGRAPH2005 emerging technologies
ARS Electronica 2005(2年間常設展示中)
ACM SIGCHI ACE 2006
WIRED NextFest2006
EuroHaptics 2008
展示の結果,どの国においても,飲む行為の潜在的な楽しさ及び吸飲感覚の提示という
独創性・新規性が評価され,吸飲感覚の体験が国際的に受け入れられる感覚であることを
確認することができた.また,大多数の体験者がその食感に納得していたことから,リア
リティの高い吸飲感覚を提示することができていたと思われる.
展示の際,吸飲感覚の評価が国ごとの食文化に影響されるという興味深い発見があった.
例えば,日本ではカレーライス,カキ氷などが好まれ,フォアグラなどの見慣れない食品
の評価はあまり高くなかった.一方ヨーロッパでは,フォアグラやシャンパンなどに関す
111
る評価が高く,多く選択された.また,アメリカではケーキやシェイクなどが好まれ,体
験数が多かった.このような好みが生じたことから,本装置で提示された吸飲感覚よって
食品独自の食感要素が確実に伝達されていたものと思われる.
また,本展示では普段は絶対にストローで食することのない食品を多数用意したにも関
わらず,多くの体験者がリアリティを感じていた.この原因として,既に大量のデータベ
ースを普段の食生活の中から得ているため,食行動が変わっても食感をある程度マッピン
グすることが可能だったのではないかと思われる.
以上から,提案した吸飲感覚再現手法の有効性が示されると共に,吸飲感覚という触覚
コンテンツが世界的に受け入れられる食感覚であり,また十分な感性情報を有したもので
あることが示された.
7.4.7
食品の判別実験
実演展示により,吸飲感覚の概念が広く受け入れられ,製作した記録・再生システムの
有効性が示された.その中で,我々は普段ストローで食さないものまで理解できることが
判明した.そこで,実際の判別率を調査し,吸飲感覚によってどの程度明確に食品が判別
されているかを検証する.
7.4.7.1
実験内容
被験者に数種類の食品の吸飲感覚をランダムに提示し,最も近しいと感じられた食品を
回筓させる実験を行った.実験では,6 種類と 3 種類の食品に対して以下の 3 つの提示条件
を設定し,それぞれ行った.
条件 1: SUI による圧力・振動の提示のみを行い,外部スピーカからの吸飲音提示を行わな
い場合
条件 2: 圧力・振動の提示を行わず,外部スピーカからの吸飲音提示のみを行う場合
条件 3: SUI 及び外部スピーカにより,圧力・振動・音全ての提示を行う場合
食品は,7.4.2 の考察にて仮定した食品群ごとに 2 種類ずつ選んだ.選んだ食品は,
「ラー
メン・生卵」
「コーラ・ポップコーン」
「シェイク・もち」である.6 種類の場合では選んだ
食品全てを使用し,3 種類の場合では「生卵」
「ポップコーン」
「シェイク」を使用した.ま
た,実験は,条件1,条件 2,条件 3 の順に行った.実験手順は,以下の通りである.
1.被験者に,予め食品の種類を教える.また,食品の写真一覧を目の前に置いておく
2.ランダムに吸飲感覚提示を行う
3.1回の感覚提示ごとに,どの食品だと思ったかを記入してもらう
4.2~3を20回繰り返す
112
被験者は 23~26 歳の健全な男子 5 名であった.
7.4.7.2
実験結果
以下に実験結果をまとめた表を示す.
表7 実験結果
Condition 1 Condition 2 Condition 3
Average of correct answer rate (six foods)
24[%]
57[%]
57[%]
Average of correct answer rate (three categories)
46[%]
63[%]
72[%]
表 7 より,提示される要素が増えるほど食品を正確に判別できることが確認された.ま
た,提示における食品の識別率は 3 種類の食品提示で 70%を超え,6 種類でも約 60%であっ
た.チャンスレートは 6 種類で約 16%,3 種類で約 33%であることを考えると,これらの正
筓率はチャンスレートの 2 倍以上であり,十分高い値であると言える.以上から,製作し
た装置によってリアリティの高い吸飲感覚が提示されていると共に,普段と異なる食行動
においても我々は食品をある程度識別可能であることが分かった.
7.5 Hi-Fi 触覚提示の導入
SUI による吸飲感覚の提示では,空気圧制御と直接的な振動刺激,そして吸飲音の提示に
よって成り立っている.この 3 種類の要素は,対応する周波数範囲が以下のようになる.
空気圧=低周波(20Hz 以下)
振動=中~高周波(20~1kHz)
吸飲音=可聴域(20~20kHz)
このことから,全体として広い周波数帯域が必要である.これに対し,筆者が提案する
Hi-Fi 触覚提示は空気圧駆動を行い,広帯域性を有するという特徴を持つ.よって,
「空気圧
制御」と「広い周波数帯域」という重要な要素が一致することから,本手法は吸飲感覚の
提示にとって相性が良く,導入することでさらなるリアリティの向上が期待される.以上
から,本論文で考案された手法を吸飲感覚提示装置に応用することを試みた.
7.5.1
従来型 SUI の問題点
これまでに製作した SUI は,リアリティの高い吸飲感覚を再現することに既に成功して
いる.しかしながら,本装置はハードウェア面,制御面でそれぞれ以下の問題を抱えてい
る.
113
・空気圧の高速・高精度な制御ができない
空気圧制御アクチュエータとしてソレノイドと RC サーボを用いていた.これらの応筓性
はそれぞれ約 100Hz 及び約 20Hz である.空気圧で再現するのは約 20Hz 以下についてであ
り,歪みのない制御のためにはその 10 倍以上の応筓性が必要であることから,これらのア
クチュエータは十分な応筓性を持つとは言えない.また,ソレノイドには階調性が無く,
微妙な空気圧の調節が難しい.さらには,2 つのアクチュエータを連携させているため,制
御が複雑化してしまうことも問題である.
・振動源及び吸飲音源の提示位置が実際の位置と異なる.
振動提示には,外部アクチュエータによってストローを直接振動させ,口唇部へ伝達さ
せる方式を用いていた.また,吸飲音源に関しても音質の問題から外部スピーカを配置し,
吸飲音を提示していた.しかしリアリティを追求する場合,実際に振動や音声が発生する
位置に提示振動源・吸飲音源があることが望ましい.
・吸飲力に対応した吸飲感覚提示に対応していない
急峻な吸飲のみに限定された制御を行っており,異なる吸飲動作に対応していない.
以上から,本提案手法を用いて上記の問題を解決する新たな装置の開発を行うこととし
た.
7.5.2
設計
上記の議論から導かれた問題に対し,本提案手法を導入することを含めたハードウェア
の設計を以下の点について変更した.
・空気圧の高速・高精度な制御ができない→高速デジタルサーボによる弁の開閉
約 400Hz の応筓周波数を持つ高速デジタルサーボを導入し,サーボ卖体で細かな開閉制
御を行う.これにより,目標とする 20Hz 以下に対し 10 倍以上の応筓性を持ち,空気圧の
歪みのない再現が可能となると考えられる.また,弁駆動を 1 つのアクチュエータのみで
直接的に行えるようになったことで,制御の簡略化や再現性の向上が可能となる.
・振動源・吸飲音源の位置齟齬→スピーカによる空気の直接駆動及び小型スピーカユニッ
トの配置
振動は,音響スピーカによってストロー内部の空気を直接駆動することで提示する.こ
れにより,振動源の位置が実際の吸飲時と同じになり,再現性が高まることが期待される.
吸飲音は小型スピーカユニットを記録時とほぼ同じ位置に取り付け,吸飲音を再生する.
振動提示に用いられているスピーカを使用するのが最も効率的であるが,音質に関わる問
題から専用の音響ユニットを配置する.
・吸飲力に対応した吸飲感覚提示に対応していない→高速マイコンによるフィードバック
制御
114
高速なマイコンである SH7125F(ルネサステクノロジ)を使用することで 1kHz 以上の更新
周波数でフィードバック制御を行う.フィードバック制御により,吸飲力に対応した制御
が可能となることが期待される.
ストロー
小型スピーカ
高速サーボ
弁
図112 本提案手法を導入した空気圧・振動提示機構
7.5.3
製作
7.5.2 の設計を基に,ハードウェアを製作した.製作した装置は制御部と提示部である SUI
から構成されている.制御部にはマイコン(ルネサステクノロジ,SH7125F)及びアンプ
(MAX9704)から構成されている.SUI は空気圧センサ(フジクラ,XFPM-115KPAR),デジタ
ルサーボ(ハイテック,HSG-5084MG),音響ユニット(I.dear,ストーンスピーカ),スピーカ
(AIR WAVE,CLF040P1),弁から構成されており,図 112 の機構を組み込んだ.弁には柔軟
ポリウレタン樹脂(エクシールコーポレーション,クッションパット 15M)を用いた.音響ユ
ニットは記録時との位置関係を符号させるため,SUI の上蓋に設置する形式とした.提示部
は全て CAD(Solidworks)にて設計し,3D プリンタ(Dimension SST768)にて出力した.
以下にブロック図,CAD 図,SUI の外観を示す.
115
提示部
空気圧センサ
デジタルサーボ
音響ユニット
スピーカ
制御部
圧力値
マイコン(SH 7125F)
制御信号
音声信号
振動信号
アンプ(MAX9704)
図113 空気圧・振動提示機構
図114 SUI の全体図(CAD)
116
音響ユニット
ストローガイド
空気圧センサ
スピーカ
サーボ
図115 SUI の内部構造(CAD)
図116 SUI 外観 1
117
空気圧センサ
スピーカ
図117 SUI 外観 2
サーボ
図118 SUI 外観 3
118
7.5.4
再現性の確認
本装置の再現性を確認するため,7.4.5 と同様の実験を行った.その際,食品データは飲
料(ウーロン茶)を用いた.
結果を以下に示す.
10
Pressure [kPa]
0
-10
-20
-30
-40
-50
-60
0
0.5
1
1.5
2
2.5
2
2.5
Time [S]
図119 記録データ(飲料)
10
Pressure [kPa]
0
-10
-20
-30
-40
-50
-60
0
0.5
1
1.5
Time [S]
図120 再現結果(飲料)
119
図 119 ,図 120 より,再現データは使用した圧力データに非常に近い値を示した.しか
しながら,飲み始めの部分で大きな誤差が生じてしまうという問題が発生した(図 120 0.4 秒
付近).これは,吸飲動作の検出閾値の設定が高すぎたため,-20kPa まで圧力が下がった次
点で制御が開始された結果だと推測される.よって,閾値を調整することで解決可能だと
思われる.また,再現結果には全体的に高周波ノイズが存在することが見て取れた.これ
は,空気圧センサの値にノイズ成分が混入したことが原因であると考えられる.よって,
センサ側にローパスフィルタを用いてノイズを除去することで解決可能だと思われる.
以上から,本手法を導入した再現装置による再現性が確かめられた.
7.5.5
動的な吸飲力への対応
7.5.5.1
対応が必要な要素
吸飲力が変化すると,当然ながら吸飲感覚も変化する.この際にどのような変化が生じ
ているかを吸飲感覚の三要素についてまとめた.
空気圧:吸飲力の変化によって自動的にその値が変化していくため,制御の必要性は低い
振動及び吸飲音:吸飲力によって出力される周波数が異なることが考えられるため,吸飲
力に対応した出力の切り替えが必要
以上から,振動及び音声に関わる録音データの出力について,動的な吸飲力への対応を
試みた.なお,本試みは「飲む」という行為にとって最もポピュラーである飲料(水)につい
て行った.
7.5.5.2
手法
吸飲力への対応するため,まず 1 つの音声データから編集し,出力する試みを行った.
音声の編集では,ピッチと音量のそれぞれを変化させる手法が存在する.また,近年では
ピッチを保ちながら再生速度を調節する手法が存在する[130][131].よってそれぞれの手法
を用いて大・中・小の吸飲力に対応するデータを生成し,実際に記録した音声データと比
較した.各手法による人工音生成には,ストローを用いて水を一定の力で吸飲した際の,
「中」
に当たる音データを使用した.なお,生成には音声編集ソフトウェアである SoundEngine
を用いた.実験条件をまとめたものを以下に示す.
・条件 1:
「大」
「中」
「小」の吸飲力による実測値
・条件 2:音量固定,ピッチ変更,再生速度固定
・条件 3:音量固定,ピッチ固定,再生速度変更
・条件 4:音量変更,ピッチ固定,再生速度固定
120
10000 15000
各手法によって生成したデータの周波数分布を以下に示す.なお,音量を変化させる手
法の場合は周波数分布が全て同じとなるため割愛する.
Frequency [Hz]
1
10
100
1
10
100
1000
10000
100000
-20
-30
middle
Power [dB]
lowest
-40
highest
-50
-60
-70
-80
-90
Frequency [Hz]
10
100
1000
10000
Frequency [Hz]
100000
-20
-20
-30
-30
-40
-40
-50
-60
Power [dB]
Power [dB]
1
1000
10000
100000
-50
-60
-70
-70
-80
-80
-90
-90
図121 水の吸飲音の周波数解析結果
右上:実際の記録データ.
左下:ピッチの変更
右下:ピッチ固定で再生速度を変更
図 121 より,実測値では吸飲力が高まるにつれて高周波成分エネルギーが相対的に増加
していた.また吸飲力によって特徴周波数が変化し,特に吸飲力が小さい場合に顕著であ
った.これに対してピッチを変更した場合,生成した波形に不可解なスパイクが見られ,
周波数分布分も大幅に異なる結果となった.また,ピッチ固定で再生速度を変更した場合
は周波数分布に変化が見られなかった.同様に,音量のみを変更した場合も周波数分布に
変化は認められなかった.次に,生成したデータを実際に聞いてみた.この結果,いずれ
の手法についても実際の音声と比べて現実感が欠如したものであった.以上から,基準と
なる音声データから吸飲力に対応したデータを人工的に生成することは難しいことが分か
った.
そこで次に,実際に複数の吸飲力に関して音声データを記録し,体験者の吸飲力によっ
て音声データを切り替える手法を試みた.予備実験として複数の被験者に体験させたとこ
ろ,自然な感覚であるとの回筓が得られた.しかしながら,段階が多すぎると膨大な記録
データが必要となってしまう.逆に段数が尐なすぎると切り替えたことが悟られてしまい,
121
リアリティが損なわれてしまう.そこで,何段階以上ならば自然に知覚可能かを確認する
実験を行った.以降では実験の内容とその結果を述べる.
7.5.5.3
実験内容
実験は,以下の手順で行われた.
1.
実際にストローで水を飲む.その際,60BPM のメトロノーム音に合わせて吸飲力の強
弱を行う.
2.
実験装置を用いて,最大吸飲力を測定する.この値を基に音声切替の閾値を設定する.
3.
1.と同様に,60BPM のメトロノーム音に合わせて強弱を付けながら吸飲する.この時,
吸飲力に応じた音声が出力される.
4.
再生された音声の自然さを,5 段階評価で回筓する. (bad=1-2-3-4-5=good).
提示する音声の段階は 1,2,3,4,5,10 段の 5 種類を用意し,1 種類毎に 3 回ずつ,計 15 試行
をランダムに行った.
Speaker unit
Pressure
sensor
図122 実験装置及び実験風景
実験結果を以下に示す.
122
Evaluation of naturalness
4
3.5
3
2.5
2
1.5
1
2
3
4
5
The number of steps of sound
10
図123 実験結果
図 123 より,5 段階以上であれば音声の変化が自然に知覚されるということが分かった.
7.5.5.4
実機への導入
7.5.5.3 の結果を受け,実際に装置に吸飲音制御を導入した.再現した感覚は,実験で用
いた飲料(水)である.振動及び吸飲音に関しては,7.5.5.3 にて実測した吸飲音データを用い
た.空気圧に関しては,記録時の最低気圧値以下にはならないサーボ角度を経験的に求め,
その角度で固定した.数人に体験してもらった結果,従来型 SUI よりも高いリアリティを
知覚したという意見が寄せられた.また飲む楽しさが増したとの感想も得た.
以上から,本実装によって動的な吸飲力に対応し,より高いリアリティの吸飲感覚と飲
む行為が持つ楽しさの向上を実現することができた.
123
図124 体験の様子
7.6 まとめ
本章では本提案手法を用いた触覚コンテンツとして,ストローでモノを飲む際に知覚さ
れる吸飲感覚を提示し,飲む行為及び食感の中に含まれる感性情報の伝達を試みた.
まず,吸飲感覚の概念について解説し,吸飲感覚を構成する要素を「空気圧」
「振動」
「吸
飲音」の 3 種類と定義した.
次に,リアリティの高い吸飲感覚を提示するための記録・再生手法を考案した.吸飲感
覚の記録では,記録装置を製作して実際の食品をストローで吸飲した時に発生する空気圧
と音声を記録した.また,取得結果の類似性から三種類程度のグループに分けられること
を見出した.吸飲感覚の再生では,吸飲感覚装置である SUI を実装した.本装置は吸飲感
覚の 3 要素を提示可能であり,小型軽量,「飲む」というアフォーダンスを持たせた概観,
衛生面の配慮を考慮した構成という特徴を持つ.本装置の評価として,空気圧の再現性を
124
確認した.また,一般への展示活動により吸飲感覚という概念が広く受け入れられること
及び体験者の反応から吸飲感覚が十分な感性情報を有したものであることを確認した.さ
らには,食品の判別実験により吸飲感覚が幅広い食品に適用可能であることを示した.
最後に,より高い再現性を目指して本提案手法を導入した再生装置の製作及び新たな制
御手法の試行を行った.再生装置では,空気圧駆動にスピーカを活用することを含めた構
造の改良を行い,高速・高精度な制御を可能とした.また,実際に空気圧の再現性を確認
し,本装置の提示能力を確認した.制御手法では,動的な吸飲力に対応するため音声デー
タの段階的な切り替え手法を提案し,自然に感じられる最低切り替え数を実験により求め
た.また,再生装置で他要素を含めた吸飲感覚提示を行い,従来よりも高いリアリティと
楽しさを有することを確認した.しかしながら,今回は「水」のみを対象とした提示に留
まっており,様々な食品に対応させることが今後の課題として残った.
7.1 でも述べたように,吸飲感覚の提示は物理的な体内への物質摂取を行うことなく安全
な食体験を可能とした.このことは様々な可能性を持つ.例えば,アレルギーへの対応で
ある.味覚や嗅覚を提示する場合では,アレルギーが原因で体験できない人が発生してし
まう.一方,本システムの場合,アレルギー対象の食品であってもその食感を味わうこと
が可能となる.また,普段は食べることを敬遠するような食品であっても,興味を持たせ
ることができる可能性がある.実際,展示ではあえて嫌いな食品を体験しようとする人が
非常に多く見られたことからも,このことを垣間見ることができる.更には,実際の食品
に対して吸飲感覚を付加することで食の楽しさを付加するという Augmented Reality への応
用も考えられる.この案では,エンタテインメントはもちろん,病院において一般に味気
ないと言われる流動食などに応用可能であることから,実現すれば幅広い需要が見込める.
今後は,触覚だからこそ生まれる食感覚提示の有用性を明確に示し,食の楽しさ,奥深
さをより多くの人に伝えるシステムとして成熟させたい.
125
第8章
触覚コンテンツ 5:
触覚のスロー再生
8.1 目的
記録された情報を時間方向に伸縮する手法は,物理現象の詳細な解明,実験データの多
面的な分析,装置のデバッグ等,科学技術の分野において長年用いられ多大な功績を挙げ
てきた.また,芸術やエンタテインメントの分野では,その効果の美しさ,異様さ,斬新
さが大きく評価され,半導体技術の大きな進展により高速度撮影が極めて低コストで行え
るようになったこともあり[132]爆発的に普及している.例えば静止画では,高速シャッタ
ーによって一瞬の出来事を高精細に切り出し,美しさや異様さが混在する不思議な感覚を
もたらすことに成功している[133].また動画では,アクションシーンなどでスローモーシ
ョン映像を用い,高い臨場感を演出している[134].
しかしながら,最終的な出力は全て視覚に頼っている現状がある.聴覚の分野においては
セキュリティや AV 関連分野において音声の基本周波数を変化させる変声機が存在するが,
あくまでも変調であるため映像における自然な時間伸縮とは言い難い.これは,人間の聴
覚は周波数に対する知覚能力が非常に高いため音声を卖純に時間伸縮してしまうと変質さ
れた別物の音に聞こえてしまうことが原因だと考えられる.
このような背景を受けて筆者は,時間伸縮された情報出力先として新たに触覚が利用で
きないかと考えた.なぜなら触覚の場合,異なる速度で物性を提示しても判別が可能であ
るという特性を持つためである.我々が実際に物を触る場合,様々な速度で手を動かす.
その場合,発生する振動周波数は異なるはずなのに,同じ物質として感じることができる.
昆陽らはこの特性を利用し,手を動かした場合にその速度に応じて基本周波数を変化させ,
能動時におけるリアルなテクスチャを知覚させるという試みを行っている[135].以上から,
触覚においても時間伸縮を行うことで特性を損なうことなく現象を捉え,臨場感や異様さ,
美しさを感じさせるような感性表現が可能であると推測される.
ところで,触覚の時間伸縮という試みは,これまでに提案してきたコンテンツと根本的
126
に異なる点が存在する.それは,これまでの提案コンテンツが現実の再現を追求していた
のに対し,本提案は現実では知覚し得ない現実を知覚させること,つまり超現実を追求し
ている点である.現実のリアリティを捨てて超現実を追求するこのようなアプローチは,
これまでの触覚研究全体においても例が無い.この試みが成功したならば,触覚は現実の
模倣から一歩踏み出した新たな表現を得ることができるだろう.
以上から,実際に時間伸縮させた触覚を提示するシステムを本提案手法にて実装するこ
ととした.なお,今回はより一般的で効果が高いと考えられる時間伸長についてのみ取り
扱う.また実装に当たっては,映像によるスロー再生において最も活用されていると思わ
れる「衝突」について取り扱う.
本章における目的は,衝突時における触覚情報を時間方向に伸長して提示することで,
映像と同様の感動効果を演出し,触覚における新たな表現を獲得することである.
8.2 スロー効果の要因
我々が時間伸長された映像を見る際,どの点に感動や驚きを覚えるのだろうか.筆者は,
スローモーションが独特の効果を持つ条件が大きく分けて以下の 2 点が存在すると考えた.
1. 極端に伸長された現象が,本来どのような現象なのかを十分に知っていること(例えば,
分子運動のように全く知らない現象を可触化できても,驚きはするが感動にはならない
と思われる)
2. 1 を満たした上で,その現象の知覚し得なかった側面を知覚すること
この 2 点を満たすことで,実際に体験して分かっているが脳が理解しきれないという一
種の混乱,また予め見知っている現象に対してこれまで知り得なかった新たな側面の知覚
が加わったことへの喜びといった複雑な感情が生まれ,スローモーション独特の効果が生
まれると推測される.1 点目の要因は,我々が触覚を用いて数多く経験してきた現象を取り
扱うことで満たすことができると考えられる.よって,1 点目の要因を満たした現象につい
て 2 点目の要因を満たすことで触覚においても時間伸縮効果が得られるものと考える.以
上から,本章では最も容易に衝突を感じられるであろう「物体を上から落としたときの衝
突感」に焦点を当てた記録及びスロー再生を行う.
8.3 本提案手法の利点
本章で筆者が扱う触覚のスロー再生に関して,本提案手法は以下のメリットがある.
127
・幅広い周波数帯域
触覚情報を時間軸方向に伸長する場合,当然ながら周波数分布が低周波方向に大きくシ
フトする.本提案手法は広い周波数帯域を持つため,通常速度時の高周波成分はもちろん,
伸長率が高い場合においても十分に追随できるだけの提示能力を有している.
以上から,本提案手法を触覚のスロー再生に用いることは有効であると考えられる.
8.4 触覚におけるスロー再生効果の検証
本章では,触覚においてスローモーション再生を行った場合に映像と同様の効果が知覚
されるかについて検証する.まず,記録システム及び提示システムについて述べる.その
後,実際に展示を行った結果について報告する.
8.4.1
記録システム
記録システムは,高速カメラ(カシオ,EXLIM Pro EX1),マイク,照明,振動計測台,PC
から構成されている.高速度カメラでは,30fps(通常速度),300fps(1/10 倍),600fps(1/20 倍),
1200fps(1/40 倍)の 4 種類についてそれぞれ記録した.振動計測台は,昆虫マイク[136]の原
理を応用したものを製作した.構成は,ボイスコイル(音響スピーカ)に円錐型接触子を取り
付け,厚さ 1mm のプラスチック板に接触させたものとした.この構成を用いた装置を製作
し,プラスチック板に物体を落下させ,衝突時の板の衝撃を電流値として計測した.計測
された電流値は PC のマイク端子に入力し,wav データとして保存した.スローモーション
で触覚を再生する場合,全体の周波数が低周波方向にシフトするため,普段の触覚研究で
は扱わない 1kHz 以上の周波数も記録する必要が生じる.よって,1/40 倍までのスロー再生
に対応するため,記録する周波数のサンプルレートを 44kHz と設定した.また,音声も同
様に 44kHz で記録した.以下に記録システムのブロック図,外観,触覚記録部の構造図を
示す.
128
映像
高速度カメラ
音声
マイク
衝突感
触覚記録部
スピーカ
電流値
PC(マイク端子)
図125 記録システムのブロック図
照明
触覚記録部
高速度カメラ
マイク
図126 記録システムの外観
129
物体
プラスチック板
円錐型接触子
ボイスコイル
(スピーカ)
PC(マイク端子)
図127 触覚記録部の構造
8.4.2
記録内容
8.4.1 にて述べた記録システムを用いて実際に 3 種類の物体をそれぞれ落下させ,プラス
チック板の振動を記録した.物体は,それぞれ特徴的な形状や物性を持つものとしてビン(剛
体・重量物),ナット(剛体・粒状),シリコン(粘弾性体)を選択した.
図128 記録に使用した素材
左:ビン
130
中:ナット
右:シリコン
図129 記録の様子
8.4.3
提示システム
提示システムは,LCD ディスプレイ,キーボード,スピーカユニット,アンプ,触覚提
示装置,PC から構成されている(図 130 図 131 図 132 ).8.4.1 にて記録された音声のデータ
は,音声編集ソフト(Sound Engine)にて各倍率に対応した時間伸長を行った.編集された音
声は映像編集ソフト(Premier Elements 3)にて記録映像と合成し,一つのムービーとして再生
した.記録された触覚データは,インタフェースボード(Interface Corporation, PCI-3523A)で
出力した.その際,スロー提示を行うためにサンプリングレートである 44kHz よりも低い
更新周波数で出力した.以下に出力レートを示す.
1/10 倍→4.4kHz
1/20 倍→2.2kHz
1/40 倍→1.1kHz
触覚提示部として,本提案手法である音響スピーカを組み込んだ装置を製作した.スピ
ーカは 30cm 上部に下向けに取り付けられており,体験者は下から手を入れ,上向きに押し
当てることで手掌部とスピーカコーン間の空気圧を密閉状態に保つ.これは,上から物体
が落ちてくる現象に沿った配置とするためである.
映像は LCD ディスプレイで提示した.没入感を高めるため,ABS 樹脂製のケースに小型
LCD を入れ,のぞき穴から見る形式とした.また,手の位置と映像の光学的位置を符号さ
せるため,のぞき穴部にレンズをはめ込んだ.これにより,臨場感を高めることに寄与し
ている.音声は触覚提示部の用脇にスピーカを置いて提示した.
131
Key Input
Keyboard
PC
Waveform
Data
LCD Display
Interface Board
Waveform
Signal
Tactile Display
Stereo Amplifer
図130 提示システムのブロック図
図131 提示システムの外観
132
図132 右:映像提示部
左:触覚提示部
LCD 触覚提示装置
スピーカ
図133 左:体験形式
8.4.4
右:実際の体験風景
展示
本内容は学内での発表会,インタラクション 2009[137],第 14 回日本バーチャルリアリテ
ィ学会大会[138]にてデモ展示を行った.展示では,8.4.2 にて記録したデータを 8.4.3 にて述
べた方法で編集したデータを使用した.体験者は各素材に対し,通常速度,1/10 倍,1/20
倍,1/40 倍をキーボードによって選択し,映像や音声と同期された触覚のスロー再生を体
験可能とした.展示方法としては,素材を選んだ後にまず通常速度での提示を行い,その
後体験者が希望した倍率のスロー再生を行うという方法を採った.これは,最初に通常速
133
度での体験をすることでどのような現象を体感するのかを被験者に把握させ,8.2 における
1 番目の要因をより確実に満たすためである.
これらの展示の結果,インタラクティブ発表賞,学術奨励賞を受賞するなど触覚のスロ
ー再生に対して高い評価を得た.体験者の意見として最も多かったのは,これまで体験し
たことのない感覚を覚えたというものであった.また,感じた触感に対して違和感があっ
たという声はあまり聞かれなかった.このことは,音声をスロー再生した場合に感じる変
質感が触覚では生じず,通常速度時と同一の現象と捉えつつもスロー再生によって新たな
側面を感じ得たことを示唆している.
次に,触覚によるスロー効果に関する主観評価を行った.評価方法としては,まず映像
のみで通常速度での再生及びスロー再生(1/40 倍)を見てもらい,その後触覚を追加した状態
で通常速度での再生及びスロー再生(1/40 倍)を行った.その後,映像のみと比較して触覚を
追加した場合がどう感じたかを 7 項目に関して回筓させた.この 7 項目は,映像のスロー
再生の効果を表す際に頻出する形容詞群である.回筓は 3 を映像のみの場合の印象とした
1(とても弱く感じた)~5(とても強く感じた)の五段階で回筓させた.実験協力者は 10 代から
30 代の 38 名である.
結果を以下に示す.
5
4
3
2
1
0
迫力
不思議さ
美しさ
分り易さ
印象深さ
驚き
新鮮さ
図134 主観評価結果
図 134 より,全ての項目において触覚を付加した場合の方が高い評価となったことから,
触覚によるスロー再生の効果がここでも確かめられた.特に,分かり易さが下がることな
134
く印象深さや不思議さが高まるという結果から,スロー触覚による違和感はほとんど無い
ものと考えられる.このことから,8.2 にて述べたスロー効果の要因を満たすことができ,
触覚においても映像の場合と同様にスロー効果が存在することが確認できたと言える.
以上から,8.4 では触覚のスロー再生を可能とする記録・再生システムを実装し,展示に
より触覚のスロー再生が映像と同様の効果が得られることを示した.
8.5 触覚のスロー再生における物体の判別特性
8.4 にて,触覚においてもスロー再生による独特の効果を知覚されることが確認できた.
しかしながら,映像と同時に提示していたため,触覚のみでの効果とは言い難い.触覚の
みをスロー再生した場合にどのような効果が望めるだろうか.ここで,前節で行った主観
評価の結果(図 134 )に注目する.主観評価では「分かり易さ」の項目が「新鮮さ」の項目に
次いで高かった.このことから,触覚のスロー再生は感情に訴える新たな触覚表現である
と同時に,現象をより詳細に提示できる拡大鏡のような効果も有する可能性がある.した
がって本節では,触覚情報をスロー再生した場合の物体判別特性を比較し,スロー再生に
よって判別力が向上するか否か,向上するならばその条件を検証することで触覚のみによ
るスロー効果の検証を行った.なお,本節においても 8.4 で取り上げた「物体を上から落と
したときの衝突感」に焦点を当てた記録及びスロー再生を行うこととした.
8.5.1
記録システム
本章の記録システムは,映像記録用カメラ(カシオ,EXILIM EX-F1),触覚情報記録部,
PC から構成されている.カメラは,後述する実験におけるインストラクション用の映像撮
影に使用した.触覚記録部は厚さ 1mm のプラスチック板,レーザー変位計(KEYENCE,
LK-H50)から構成されており,高サンプリングレート(100kHz)で板の振動を記録した.
135
データ保存用PC
触覚情報記録部
映像記録用カメラ
図135 記録システム
プラスチック板
レーザー変位計
図136 触覚情報記録部
8.5.2
提示システム
提示システムは,LCD ディスプレイ,キーボード,アンプ,インタフェースボード,PC,
136
触覚提示部から成る.触覚提示部は,8.4.3 にて示したものを利用した.LCD ディスプレイ
は映像提示には用いず,後述する実験における回筓に用いる.キーボードも同様である.
以下に提示提示システムのブロック図,外観を示す.
触覚提示部
出力波形
Stereo Amplifer
スピ ーカ
Interface Board
波形データ
ディ スプ レ イ
キーボード
質問内容
PC
Key Input
図137 提示システムのブロック図
ディスプレイ
触覚提示部
キーボード
図138 提示システムの外観
137
8.5.3
判別実験
触覚のスロー再生における判別特性を検証するため,8.5.2 で述べた提示システムを用い
た触覚の判別実験を行った.
8.5.3.1
サンプル
実験に先立ち,特徴を 3 種類(カテゴリ 1=剛体・粒,カテゴリ 2=弾性体・球,カテゴリ
3=粘弾性体)に分けたサンプルを各 3 種類ずつ,計 9 種類用意し,8.5.1 で述べた記録シス
テムにて情報の記録を行った.記録したサンプルは以下の通りである.
カテゴリ1
米
カテゴリ2
カテゴリ3
ゴムボール
シリコン
ナット
スーパーボール
スライム
大豆
ビー玉
こんにゃく
図139 記録したサンプル
8.5.3.2
実験方法
実験は,ある再生速度においてランダムに衝突振動を提示し,最もイメージに合うと思
ったサンプルを選択するというものとした.再生速度は 1 倍,1/3 倍,1/10 倍,1/30 倍の4
通りで,被験者毎にランダムに順番を変更した.サンプルは各再生速度に対してそれぞれ 5
回ずつ,計 45 回をランダムに提示した. 実験手順は以下の通りである.
138
1.
触覚情報記録部にセットされているプラスチック板の裏に手掌部を配置し,サンプル
を落下させて衝撃感を確認する.これを全てのサンプルに対して行う(インストラクシ
ョン 1).
2.
実際に記録した際の映像を全てのサンプルに対して見る(インストラクション 2).
3.
手掌部を提示装置に押し当て,触覚による衝突感のみを体験する.
4.
体験毎に,最もイメージに近いと思われるサンプルをキーボードにて選択する.
聴覚の影響を排除するため,実験中は被験者にヘッドホンを装着させ,常にホワイトノ
イズを提示した.提示する手は利き手に寄らず右手とし,シリコンにて手を提示部に固定
した.また,1 つの再生速度の実験毎に休憩を取らせた.被験者は健康な 20 代男子 8 名で
あった.
図140 インストラクションの様子
左:実際のサンプルの落下感を体験
139
右:映像にて記録風景を視聴
図141 実験の様子
8.5.3.3
実験結果
実験の結果を以下に示す.なお,全ての表の数値は全体の回筓数に対する回筓率(%)で表
示してあり,小数点以下は四捨五入してある.なお,表の数値と色は以下の項目と対応し
ている.
1:米 2:ナット 3:大豆
4:ゴムボール 5:スーパーボール 6:ビー玉
7:スライム 8:シリコン 9:こんにゃく
:最も高い回答率
:2番目に高い回答率
表8 回筓結果(1 倍)
回答
提示
1
2
3
4
5
6
7
8
9
1 50 8 3 0 3 5 15 15 3
2 18 23 30 3 10 13 0 3 3
3 5 48 35 3 8 3 0 0 0
4 0 3 0 40 33 25 0 0 0
5 0 3 3 33 28 35 0 0 0
6 0 0 0 38 33 30 0 0 0
7 0 0 3 3 0 3 33 28 33
8 5 0 3 3 0 5 20 48 18
9 0 0 0 8 5 3 28 20 38
140
表9 回筓結果(1/3 倍)
回答
提示
1
2
3
4
5
6
7
8
9
1 60 3 3 0 3 0 13 18 3
2 20 30 28 10 5 5 0 3 0
3 5 35 25 10 8 5 3 8 3
4 0 3 5 43 38 10 3 0 0
5 0 3 3 45 23 20 5 0 3
6 0 5 3 35 33 18 5 0 3
7 0 0 0 0 0 3 38 38 23
8 0 0 3 3 5 5 23 35 28
9 0 0 0 5 5 5 20 25 40
表10 回筓結果(1/10 倍)
回答
提示
1
2
3
4
5
6
7
8
9
1 65 5 3 0 0 0 10 13 5
2 18 50 28 0 5 0 0 0 0
3 5 40 43 0 8 5 0 0 0
4 0 0 0 25 45 33 0 0 0
5 0 0 0 33 33 33 3 0 0
6 0 0 5 55 15 25 0 0 0
7 3 3 5 5 5 0 18 43 18
8 0 3 0 3 0 3 40 28 25
9 0 0 3 10 8 5 10 23 43
141
表11 回筓結果(1/30 倍)
提示
回答
1
2
3
4
5
6
7
8
9
1
2
3
4
5
6
7
8
9
50
10
8
0
0
0
20
18
8
18
23
25
5
3
0
0
5
5
8
30
40
10
3
3
3
5
3
3
13
15
35
28
30
0
5
8
0
10
8
30
20
35
0
3
5
0
8
3
10
35
18
10
8
8
8
8
0
5
8
8
25
15
23
8
0
0
3
0
3
28
23
33
8
0
3
3
5
5
15
20
10
表 8 ~表 11 より,いずれの再生速度についても高い回筓率が表の対角線上に集中してい
た.このことから,再生速度によらずある程度のサンプルの傾向を把握することが可能で
あることが分かった.
更に詳しく検証するため,各再生倍率におけるサンプル当たりの正筓率及び平均正筓率を
まとめた.算出結果を以下に示す.
表12 サンプル当たりの正筓率及び平均正筓率
1倍
1/3倍
1/10倍
1/30倍
1(%) 2(%) 3(%) 4(%) 5(%) 6(%) 7(%) 8(%) 9(%) 平均(%)
50 23 35 40 28 30 33 48 38
36
60 30 25 43 23 18 38 35 40
34
65 50 43 25 33 25 18 28 43
36
50 23 40 35 20 18 25 23 10
27
最も高い正答率
2番目に高い正答率
平均正筓率を見ると,1 倍から 1/10 倍まではほぼ同じ程度の正筓率であり,チャンスレ
ート=100(%) ÷ 9 = 11 % と比較して十分高い値を示した.また,小数点以下まで見ると,
最も高い平均正筓率を示したのは 1/10 倍であった.最も低い正筓率は 1/30 倍であり,他に
142
比べて大きく下がるという結果となった.サンプル毎に正筓率を見ると,1/10 倍は多くの
サンプルで最も高い正筓率を示した. 1 倍,1/3 倍は得意なサンプルは異なるものの,最も
高い正筓率の数は同一であった.1/30 倍の正筓率は全体的に低調だった.
次に,カテゴリ当たりの平均正筓率を示す.
表13 カテゴリ当たりの平均正筓率
カテゴリ1(%) カテゴリ2(%) カテゴリ3(%) 平均(%)
1倍
36
33
39
36
1/3倍
38
28
38
34
1/10倍
53
28
29
36
1/30倍
38
24
19
27
表 13 より,カテゴリ 1 のサンプルに対する正筓率は 1/10 倍が最も高く,50 %を超える
という値を示した.逆にカテゴリ 2 では 1 倍の正筓率が最も高く,カテゴリ 3 では 1 倍及
び 1/3 倍がほぼ同じ正筓率で最も高い値を示した.1/30 倍はここでも全体的に正筓率が低い
傾向にあるが,カテゴリ 1 に関してのみ 1 倍よりも正筓率が高かった.
次に,大まかなカテゴリに対する判別能力を検証するため,表 8 ~表 11 についてカテゴ
リ内のサンプルを回筓する確率をまとめた.例えば,表 8 の提示 1(米)に対して 1 及び同一
カテゴリの 2(ナット),3(大豆)を筓えた確率は,50 % + 8 % +3 % = 61 %となる.これを提示
2,3 についても同様に求めるとそれぞれ 71 % ,88 % となる.この 3 つの平均をとると,
同一カテゴリ内の触覚提示によってそのカテゴリ内のサンプルを回筓する平均確率は 73 %
と求めることができる.これを同一カテゴリの正筓率としてまとめたものを以下に示す.
表14 同一カテゴリの正筓率
カテゴリ1(%) カテゴリ2(%) カテゴリ3(%) 平均(%)
1倍
73
98
88
86
1/3倍
69
88
89
82
1/10倍
85
98
82
88
1/30倍
70
80
63
71
143
表 14 より,やはりここでも 1/10 倍が最も高い平均正筓率を示した.各カテゴリにおけ
る正筓率を比較しても,カテゴリ 3 が若干低い以外は全て最も高い値だった.1/3 倍はカテ
ゴリ 1 の値が低い反面,カテゴリ 3 に関しては最も高い値を示した.1/30 倍は,ここでも
最も正筓率が低いという結果となった.
以上から,今回の条件下では 1/10 倍までのスロー再生において物性判別に有効な場合が
確かに存在することが分かった.特に 1/10 倍は平均正筓率が 1 倍と同等に高く,カテゴリ
1 に至っては判別精度で他を圧倒する結果を出した.この原因として,刺激の変化を十分に
知覚し,そこから物体を推測する時間が増えたため自分のイメージとの比較がより深く行
えるようになったことが原因であると思われる.実際,内観報告で半数の被験者がこの速
度の提示が他と比較してわかりやすかったと筓えていた.また,カテゴリ 1 における高い
正筓率については,微妙な硬質感の違いや衝突した後の振る舞いが感じ取れ易い再生速度
だったことが原因であると推測される.1/3 倍はカテゴリ 3 について高い正筓率を持つこと
から,弾性体の振る舞いに対して判別しやすい再生速度だったと思われる.1 倍は平均的に
正筓率が高いという結果であるが,実験前に行った実物での衝突感の確認や映像提示で状
況の把握が容易だったことを考えると妥当だと言える.むしろ触覚のみで判断しなければ
ならなかったにも関わらず高い正筓率であったスロー再生の結果は,組み合わせ次第では
触覚よる判別能力を大きく向上させる手段の一つと成り得ると考えられる.
実験後,再生倍率とイメージのし易さを内観報告で訪ねたところ,1/10 倍まではインス
トラクション時の記憶から想像が可能で,1/30 倍では触覚情報のみでは想像することが難
しいとの意見が多く寄せられた.しかしながら,8.4 では 1/40 倍の提示であっても違和感は
尐なく,素直に現象を把握することができていた.この際,映像や音声を用いていたこと
から,1/10 倍までは現象を触覚のみで把握することが可能であるが,それ以下の再生速度
では他の感覚の補助が必要になるということが推測される.
以上から,8.5 では触覚をスロー再生することによって,落下物体の判別率が上昇するこ
とを実験により示し,今回の条件下では 1/10 倍が最も有効な再生倍率であることが分かっ
た.
8.6 まとめ
本章では本提案手法を用いた触覚コンテンツとして,スロー再生された触覚情報の提示
を試みた.
まず,スロー再生した場合に我々が感動を覚える要因を「極端に伸長された現象が本来
どのような現象なのかを十分に知った上で,その現象の知覚し得なかった側面を知覚する
こと」と仮定し,
「物体を上から落としたときの衝突感」という現象に対して記録及びスロ
ー再生を行う装置を製作した.装置は,映像や音声と同時にスロー再生された触覚を首相
部に提示するものである.本装置を展示した結果,これまでに感じたことのない不思議な
144
感覚を想起させることに成功した.また,主観評価によって映像のみの場合と比較して触
覚を付加した場合の方がスロー再生による感動効果が高まり,感性触覚コンテンツにおけ
る触覚のスロー再生の有効性が確かめられた.
次に,触覚のみにおけるスロー再生効果の検証を行うため,触覚情報を様々な再生速度
で提示し,その際の物体判別特性を求める実験を行った.これは,主観評価から特に効果
が高いと認められた「分かり易さ」に着目したことによる.実験の結果,通常再生時と比
較してスロー再生時の方が物体判別に有効な場合が存在することを確認した.
今回,触覚におけるスロー再生において落下物体の衝突感を取り扱った.一瞬の出来事
をじっくりと味わうという時間伸長の醍醐味を十分に活かした触知体験を創出することが
できた.しかしながら我々は,把持する,なぞる,掌で転がすなど様々な触行動により触
覚情報を得ている.特になぞり動作は質感判別に最も用いられる行動パタンであり,需用
は高いと考えられる.その際に問題となるのは,アクティブタッチであるため体性感覚と
の整合性をどう取るかということである.解決方法としては,触覚再生時に腕の動きも装
置によって制御することが考えられる.しかしながらシステムが大型化するため,実装に
は慎重を要する.また,衝突感と比較してなぞり動作におけるスロー再生が感性情報提示
にどれほど優位であるのか調査する必要がある.
また,今回は試みなかったが,時間を短縮する,つまり再生速度を速めるクイック再生
も今後行いたい.クイック再生では,非常に柔らかい物体にある微妙な特徴を捉えること
が可能ではないかと考えている.もしこのような特徴を知覚できたなら,また新たな触覚
表現として利用できるだけでなく,例えば柔らかな臓器を扱う医療分野において触診では
判別しにくい腫瘍の早期発見等に繋がる可能性がある.
触覚のスロー再生は本手法が幅広い周波数帯域を持つからこそ可能な独自の概念であり,
我々が手に入れた新たな触覚表現であると言える.視覚の分野では時間伸長を用いた様々
な作品が既に制作されていることから,触覚においても本概念を有効に用いた多くのコン
テンツが生み出されることが期待される.
145
第9章
触覚コンテンツ総括
本章では,第 3 章から第 8 章で提案・実装してきた触覚コンテンツ群から本提示手法の
特性を見つめ直し,触覚表現の可能性及び完成触覚コンテンツにおける本提案手法の本質
的価値について考察する.
9.1 提案した触覚コンテンツ群からみる触覚表現の可能性
本論文では 5 種類の触覚コンテンツを提案・実装し,そのどれもが「これまでにない」
と多くの体験者からの報告があるほどに独特の触感を持つ.この「これまでにない」は二
つの意味を持つ.一つは今まで実現されなかった斬新な触知体験を提供できたことである.
この要因については 9.2 にて考察する.もう一つは,本論文で提示された感覚は実世界の体
験を再現していないということである.この原因の一つとして,本論文で提示された情報
が不完全であることが挙げられる.各章のまとめで述べたように,本論文ではテクスチャ
や接線方向など全ての皮膚感覚情報を完全に再現していない.では,皮膚感覚情報を完全
に再現した場合はどうだろうか.2.1 で述べたように,触覚は皮膚感覚と自己受容感覚を含
んだものであり,本論文で扱う皮膚触覚がいくら高い再現性を有していても自己受容感覚
側に差異があれば体験者は異なる印象を持ってしまう.また,皮膚は触覚受容器の他にも
痛覚,温覚,冷覚の各受容器を備えていることから,これらの情報もまた欠落することに
なる.つまり,もともと皮膚感覚のみで実世界の触感を完全に再現することには限界があ
る.では,本論文で着目した感性触覚コンテンツにとって触感の再現性はどのような影響
を与えるのだろうか.
まず,実世界における触知体験の再現を目指した Skin to Skin,粘着性粘弾性感について
考える.これらは不完全ではあるが「それらしい」と思えるレベルの触感を提示している
ことが示され,多くの体験者が,それぞれが持つ触感の意味を理解し楽しんでいる光景が
見て取れた.このことから,感性触覚コンテンツとしての目的は達成したと言える.ここ
で注目したいのは,実世界での体験と本論文で製作したプロトタイプでの体験との差異で
ある.Skin to Skin ではジェスチャ側を空中で手を動かす実世界では起こりえない方式を採
った.また,粘着性粘弾性感では手の動作方向と刺激方向が異なるものであった.体験者
146
の多くはこれらの差異にもかかわらず,大きな違和感無く意図された触感を楽しんでいた.
このことは,触感を楽しむという目的において必ずしも現実世界と同じ行動と結果を追求
する必要はないことを示唆している.これは,ゲームコントローラのボタンを押している
だけなのにテレビゲーム内の主人公と同じ動作をしていると感じて思わず体が動く,ダメ
ージを受けたら思わず「痛い」と叫んでしまう等の例からもそれが伺い知れる.
次に,実世界で知覚される要素の中で触覚を抽出・提示することを目指した生物感,吸
飲感覚について考える.生物感では,外観や動作の模倣は行わず,鼓動・呼吸運動から生
じる触覚のみを再現した.吸飲感覚では,味覚や嗅覚を取り除き,吸飲時に発生する触覚・
聴覚情報のみを再現した.これらは動作を限定していることもあり触覚卖体としては再現
性が高い一方,他の感覚を分離し得ない実世界では本来知覚出来ない体験である.それに
もかかわらず,多くの体験者がリアリティを感じ,楽しんでいる.これは,抽出した要素
が本質を捉えていたことから脳がその膨大なデータベースから知覚と体験がマッピングさ
れたことが要因だと考えられる.このことから,実世界の再現ではなくとも現実世界の中
から核となる触覚的要素を抽出することで,その体験が持つ本質的な情報を知覚すること
は可能であり,触知体験に含まれる感性情報は伝達されるものと思われる.
吸飲感覚に関しては更にもう一つ述べるべき事柄がある.吸飲感覚における再生データ
作製の際,食品の記録したデータだけでなく人工的に製作したデータを用いたことがあっ
た.この人工的に作り出された吸飲感覚を実際の展示で試すと,リアリティの欠如から不
人気となるとの予想に反し,驚くほど人気となったのである.この結果は,吸飲動作自体
が持つ楽しさ,心地よさが触覚刺激によって大きく増強された結果であると考えられ,リ
アリティすらないが感性触覚コンテンツとしては成立している.
以上から分かるのは,再現やリアリティそのものを志向するのではなくヒトの心,すな
わち感情を志向する場合,再現性は最も重要な要素とはならず,むしろ再現性にとらわれ
ない触覚表現が重要な意味を持つ可能性が高いことである.
幸運なことに,本論文では感情志向型の触覚コンテンツとして触覚のスロー再生を提案
している.この提案では,映像によるスロー再生の感動を触覚でも味わえないかという点
から出発し,リアルやリアリティを志向するのであれば絶対に行わない類の周波数シフト
を行った.その結果,触覚におけるスロー再生効果の存在を示し,新たな触覚表現を手に
入れることができた.この例は,新たな触覚表現が感性触覚コンテンツに有効であり,再
現性にとらわれないことで従来の常識を覆す新しい触覚表現を生み出す可能性が多分にあ
ることを強く示唆している.これは,ほぼ表現が追及し尽くされた感のある視覚・聴覚と
比較して大きな伸びしろを持っているということを意味し,どれだけその可能性に挑戦で
きるかが今後の触覚コンテンツの発展に大きく影響するものと思われる.
147
9.2 感性触覚コンテンツにおける本提案手法の価値
本論文の表題にもあるように,本論文で提案した触覚提示手法の大きな特徴は広帯域性
である.これにより,受容器の応筓周波数範囲のほぼ全域に対して再現性の高い触覚提示
が可能となった.では,実際に最も恩恵を受けた周波数帯はどこだろうか.それは,実は
10Hz 以下の超低周波数帯である.実際,本論文で提案した 5 種類の触覚コンテンツの中で
超低周波数帯を用いなかった例は存在しない.それどころか,この超低周波数帯を用いた
「柔らかさ」の表現こそが全体の印象を左右する大きな要因となっている場合が多い.例
えば,生物感は数 Hz の呼吸周波数を基準とし,Skin to Skin における記録したジェスチャの
周波数分布を見ると,10Hz 前後にエネルギーが集中していた.また,両者にとって生物特
有の柔らかさ表現は提示の際の必須条件である.さらには粘着性粘弾性感や吸飲感覚にお
ける柔軟な素材の再現に超低周波による圧覚提示が大きく寄与し,スロー再生による周波
数のシフトに対応できたのは超低周波数帯まで対応可能だったからである.このように,
超低周波数帯は本論文で提案した全ての触覚コンテンツにおいて不可欠であり,他の触覚
提示装置には無い価値を提供している.
では,何故ここまで本提案手法が超低周波数帯を用いた「柔らかさ」を活用することに
成功したのだろうか.
「柔らかさ」の提示ならば力覚提示装置の方が得意であるし,柔軟な
素材のインタラクションに関する研究も数多く存在するはずである.
この理由は,本提案手法が持つ特徴の一つである非接触性にあると考えられる.本手法
は空気圧を皮膚に直接提示するため,触覚提示を行う皮膚に接触することは原理的にない.
一方,従来の力覚提示装置は,高品位といわれるものでも殆どはユーザが手に物体を把持
し,物体を介して力覚を知覚する.この際,高周波の制御信号を伝搬するためには物体は
硬くなければならず,結果としてユーザは硬い物体を介した力覚インタラクションしかで
きない状況があった.よって介在物との接触がほぼ無い本手法は,柔らかい物体に直接触
れるという新たな価値をユーザに与え,今まで実現されなかった斬新な触知体験となった
のである.そしてこの価値が思いのほか大きいことは,実際の体験から十分に分かる.
次に,感性触覚コンテンツにおける「柔らかさ」の意義を考えてみる.まず,一般的に
心地よいと評されている製品であるクッション,ぬいぐるみ,布団,ソファ,タオル等を
見てみると,ほぼ全てが柔らかいという特徴を持つ.また,心理学分野では 1.3 で紹介した
触ピラミッドの中の快感情を司る「明るい圧」に「soft」という項目が存在し[61],
「かたい
―やわらかい」という形容詞対が感情喚起に対して相互に影響を及ぼしているという結果
も発表されている[62].さらに,感性工学では柔らかさを感性機能の一つと定義し,心理量
と物理量の関連を示す研究が行われている[139]など,学術分野においても柔らかさが感情
喚起に寄与することが分かっている.ところで,柔らかさは一般に快感情と連結している
と言われている.しかし,本論文で取り上げた粘着性粘弾性体であるスライムは不快感情
も併せ持つことが知られており,ヘビやカエルなどの爬虫類やこんにゃくなども同様であ
148
る.つまり,柔らかさを構成する要素を制御することで様々な感情を喚起できる可能性が
ある.これは,自然界における柔らかさが生物と深い関わりがあり,生物とのインタラク
ションは安全か危険かに大きく振れることから,柔らかさの中に感情のダイナミクスを多
く入れるように進化したためだと考えられる.以上から,柔らかさを触覚的に提示するこ
とが感性コンテンツに大きな可能性をもたらすことは明白であり,感性触覚コンテンツに
おける一つの軸となり得る.
もちろん,感性触覚コンテンツには「柔らかさ」以外の軸も確実に存在する.例えば,
バイクや車の振動が心地よいという声がよく聞かれ,ミルフィーユのような層状物体の断
続的な破壊振動に快感を覚えるという例も存在する.また,陶器や木の質感や布の手触り
にこだわるなど,表面テクスチャによる高周波振動から感情が喚起される例も尐なくない.
実際,粗さの異なる触覚刺激による感性喚起実験によって,密な刺激であるほど快感情が
喚起されることが分かっている[62].本論文では表面テクスチャの提示を取り上げなかった
が,本提案手法が持つ広帯域性から十分提示することが可能だと思われる.よって,将来
的に柔らかさと表面テクスチャ感を合成した触感を作り上げることも視野に入るべきであ
り,このようなチャレンジによって触覚コンテンツがさらなる広がりを見せるのである.
しかし考えてみると,広帯域性を目指し,触覚における知覚限界である 1kHz においても
歪みのない波形出力を可能とする本手法の価値が超低周波数帯にあるとは,なんとも皮肉
な結果である.超低周波数帯がまったく注目されなかった理由は,硬い素材の再現を目指
して触覚,力覚共に高周波特性の向上を競っていたためであると考えられる.硬質感を提
示ことは,技術的困難難度が高いことからやりがいがある課題だと言える.それに対して
低周波刺激は技術的難度が低いと考えられてきたため,高い魅力を持たなかった.特に触
覚研究では表面テクスチャに関する議論が大半を占めていたため,超低周波領域はほぼ忘
れ去られていた感がある(もし忘れていなかったとしても周波数を下げれば下げるほど接触
子の素材感が強まるため,この領域を活用することは難しかっただろう).それが,非接触
性を有するだけで魅力的なものに変わるという価値観の逆転現象が起きてしまった.
灯台下暗し的なこの発見は,今後の触覚提示研究に関して示唆に富む例となるだろう.
149
第10章
結論
本論文は,人間中心の技術において重要な位置を占めると予測される感性触覚コンテン
ツ技術に関し,ハード・ソフトの両面で先鞭をつけ,その発展を推し進めることを目的と
した.これに対するアプローチとして,
「触豊かな感性表現のために必要な触覚提示手法を提案する」
「提案手法を用いて触知覚特性に沿った感性触覚コンテンツ群を提案・実装する」
という 2 点を実行することを試みた.
本章では,本論文の目的に対する 2 つの試みについてそれぞれまとめ,結論と今後の課
題を述べる.
10.1
第一の目的:感性表現が可能な触覚提示技術の確立
本論文の目的に合致した触覚提示を考えるにあたり,その条件整理を行った.まず,触
覚ディスプレイの設計にとって最も重要である周波数帯域,空間分解能についてまとめた.
その後,日常の中に存在する触知体験や触覚を主役とした製品群の中から感性的な触覚コ
ンテンツに必要な条件を選別した.選別された条件は,周波数帯域,提示面積,階調性,
外乱の 4 項目である.この中でも周波数帯域は,触覚表現の幅を飛躍的に増加させること
から,本論文では周波数帯域に着目した触覚提示を目指すこととした.
この指針に従い提案したのが,音響スピーカを用いて空気圧を駆動し,皮膚に空気圧振
動を提示する手法であった.本提案手法は空気圧による非接触性と音響スピーカが持つ広
帯域性,高階調性,高速応筓性の利点を併せ持つ.特に広帯域性に関しては 1Hz 以下~
20kHz の広い周波数帯において歪みのない波形出力が可能である.また,比較的広い面積
に対して提示可能であることと併せ,前述した条件をほぼ満たす.さらには,マルチモー
ダル提示,負圧提示,簡素な構成という特徴を備え,応用可能性と普及可能性に富む手法
であると言える.
本提案手法の特徴や有効性を実際の体験によって確認するため,簡卖な実験装置を製作
し,2 種類の実験を行った.第一は,提示圧力の測定である.この実験により,主要な受容
器の応筓周波数範囲に関して周波数によらず約 4N 以上の力が提示可能であることを示した.
150
第二は,触覚の知覚実験である.この実験ではほぼ全ての触知覚領域である 1~1kHz の振
動提示を行い,全ての領域で触覚を知覚することを確認すると共に,これまでにない「柔
らかさ」の提示が可能であることを見出した.
また,本提案手法の成否に関わる重要な問題 2 点に関して対策を講じた.第一は提示す
る皮膚とスピーカ間の密閉性に関する問題である.第二は波形の再現性に関する問題であ
る.第一の問題に対して「薄膜による密閉」及び「アタッチメントによる開口径の変更」
の 2 点を解決案として提示し,実際に実装したところ密閉性が向上した.しかしながら,
各案についてそれぞれ問題点が存在し,完全な解決には至らなかった.第二の問題に対し
て,空気圧を用いたフィードバック制御を提案し,実験によってその効果を確かめた.
10.2
第二の目的:触覚コンテンツ群の提案・実装
触覚コンテンツを考える場合,触知覚特性を把握し,それに合わせた提案をすることが
重要である.この考えに基づき,触知覚特性を「知覚の種類」,「接触対象」,「視点」の 3
種類に分類し,その中から「知覚の種類」と「接触対象」を軸として用いた 2 次元の触知
マップを作成した.その後,触知マップの 4 領域を満たし且つ感性情報を多分に含むと思
われる触覚コンテンツ群を提案した.提案した触覚コンテンツは「生物感」,
「Skin to Skin」
,
「粘着性粘性弾性感」
,
「吸飲感覚」
,
「触覚のスロー再生感覚」5 種類である.
1.
生物感
動物が人間の感情を喚起させるという「ペット効果」に着目し,最も「生命」を感じさ
せる生物的な触感覚として鼓動運動及び呼吸運動のリアルな提示を行った.提示波形は複
数の波形を比較することにより鼓動と呼吸の合成波が最も自然に感じられることを見出し,
またその最適な合成比率も実験により求めた.また,広範囲な触覚的生物表現として 2 点
を試行した.第一は想起させる生物の大きさを周波数によって制御することである.第二
は想起させる印象を静的な触覚であるテクスチャによって制御することである.実験の結
果,これらの試行を実装することで,触覚提示のみで様々な生物を想起させ得る可能性が
示された.最後に,実演展示によって世間一般に有効性を問い,認められた.
2.
Skin to Skin
日常生活における最も感情的な触知体験の一つである触れ合いに着目し,対人触覚コミ
ュニケーションにおける理想的な環境として「Skin-to-Skin」を提唱すると共に本手法によ
る実現を試みた.プロトタイプを製作し,手で行う複数のジェスチャについて識別可能な
触覚提示を実現した.また,実演展示を行うことで本提案の将来性が高く評価された.
3.
粘着性粘弾性感
日常で発生する物理現象から感じられる感動要素に着目し,その中でも「快」と「不快」
の感情が同時に喚起される特殊な素材である粘着性弾性体の感覚再現を試みた.実測によ
り粘着性弾性体の挙動を把握し,その再現を触覚によって行うプロトタイプを製作した.
151
実演展示の結果,粘着感及び粘弾性感の特徴を表す感想が多数寄せられ,再現に成功した.
4.
吸飲感覚
Quality of Life に直結する要因の一つである「食」に着目し,その中でも食品を「飲む」
感覚である吸飲感覚の再現を行った.感覚の再現に当たり概念及び要素を定義し,要素の
再現を目指した実装を行った.その手法として,実際に食品を吸飲した際に発生した要素
を記録し,再生するという方法を採った.この結果,リアリティの高い感覚を実現するこ
とが可能となり,その提示能力は評価実験,判別実験により裏付けられた.また,幅広い
展示活動によって本感覚が世界的に受け入れられるものであることが示された.さらには,
普段飲むことのない食品であっても判別可能であることが見出された.これは,我々が食
感の知覚経路を考える上で重要な発見であると思われる.
5.
触覚のスロー再生
映像におけるスロー再生の感動効果に着目し,触覚にも適用することを試みた.数十分
の 1 の再生速度を得るためには触覚の記録に数十 kHz のサンプリングレートが必要である
ため,初めに昆虫マイクを応用した記録装置を製作し,その後レーザー変位計を用いるこ
とで 100kHz のサンプリングレートを実現した.提示では,まず触覚におけるスロー再生の
効果を確認するため最も認知されている映像のスロー再生と合わせて提示し,触覚の有無
による効果の違いを確認した.この結果,触覚によるスロー再生は映像と同様の効果をも
たらすことが判明した.この結果を受け,実用的なスロー触覚の使い道として判別能力の
向上効果を取り上げ,実験により効果がある場合が存在することを見出した.
提案した触覚コンテンツの総括
提案・実装を行った触覚コンテンツ群を見つめ直し,複数の事例からリアルの限界とリ
アリティの可能性に言及した.また,リアルやリアリティだけでなく感情を志向すること
で様々な触覚表現を生み出せることを触覚のスロー再生を実例に挙げてに論じた.また,
本提案手法は広帯域性と非接触性によるこれまでにない「柔らかさ」提示が本質であるこ
とを述べ,感性触覚コンテンツにおける「柔らかさ」の重要性を論じた.
10.3
結言
これまでの議論により,本論文で提案した空気圧の非接触性と音響スピーカの広帯域性
を併せ持つ触覚提示手法が,触知覚特性全域に渡る触覚コンテンツの提示に有効であるこ
とが示された.また,本提案手法の本質が実は超低周波数帯における「柔らかさ」の提示
にあることが明らかとなり,それと同時に非接触性によって触知体験の質が大きく変化す
ることが示された.また,複数の触覚コンテンツを提案・実装した経験から,リアルやリ
アリティの志向ではなく感情を志向することにより,これまでの触覚提示の常識を超越し
た新たな触覚表現が生まれる可能性を実例と共に論じた.
152
以上から,本論文では,感性触覚コンテンツ技術の発展にハードウェア・ソフトウェア
両面で大きく寄与する多くの示唆に富んだ提案を行い,今後の触覚提示技術の発展に大き
く貢献するものと考える.
10.4
今後の課題
本論文で提案した触覚提示手法は,評価実験や各触覚コンテンツへの導入例によって従
来にはない多くの利点を示すことができたと思われる.しかしながら詳細な部分の多くは
未検証であり,そのポテンシャルは筆者でさえ未だ十分に把握できていない.また,提案
した触覚コンテンツ群はあくまでもプロトタイプの域を出ておらず,今後の研究が待たれ
る.以下,未解決の問題について整理しておく.
第2章:
センサ性能の問題から,周波数の触知覚領域全域における性能評価が行われていない.
現在の空気圧センサは応筓速度が 500Hz と本論文の目標に対して低い.このため,空気圧
によるフィードバック制御の更新周波数を上げることができず,実践投入ができない.本
手法に適用可能なセンサは意外に尐ない.これは,必要条件である「高速応筓(1kHz 以上で
きれば 10kHz)」
「微圧(5kPa 以下)」
「正負圧の対応」を満たすセンサの市場的価値が低いた
めである.筆者の手の及ばないところがボトルネックとなってしまったのは尐々残念であ
る.しかしながら最近,応筓速度が 5kHz という空気圧センサが販売された(ALL SENSORS,
10 INCH-D2-P4V-MINI).今後はこのセンサを用い,本論文では行うことができなかった評価
や制御をする所存である.
第3章:
静的なテクスチャを用いた印象操作の実験をおこなったものの,本来の目的からすれば
本手法のみでテクスチャも提示すべきであるし,可能であると考える.テクスチャに関し
ては,人工的に生成する方法と記録したデータを再生する方法がある.人工的なテクスチ
ャ感生成の研究は,高いリアリティを有したものが現在までに存在しない.この問題に対
し,筆者所属の研究室においてテクスチャ提示に関する独自の試みを行っているが,多く
の問題が存在する.一方,記録したテクスチャ感のデータを用いる手法は既に高いリアリ
ティを有する触感通信を実現している例が複数存在することから,今後はまずテクスチャ
感を記録・再生することに取り組んでいく.
第4章:
本章については,やり残したことが多い.ハードウェアでは,センサの誤認識問題が解
決していない.なるべくシンプルにという方針が仇となった格好である.また,400Hz とい
うサンプルレートはフィードバック制御を考えるとあまり高速ではない.また,頬部にお
153
ける密閉性の問題を解決していない.
本提案の効果では,触覚のみで程度相手のジェスチャ認識が可能かを具体的に検証して
いない.実演展示では十分な効果が認められたものの,展示員の誘導や視覚の影響が存在
するため,それらを除いた評価が必要だと思われる.
第5章:
制御が十分ではなく,より記録値に近しい結果となるような制御アルゴリズムが必要だ
と思われる.最も確実な方法はフィードバック制御を導入することだろう.また,動作の
方向と触覚提示の方向が異なる問題を解決していない.
第6章:
動的な吸飲力の対応について,水以外の多様な食品に対する検証が行われていない.こ
の問題に対しては,まずデータを記録しなければならないという障壁が存在する.人力で
は様々な食品に対してロバストな吸飲力を保つことが難しいため,今後人工的な吸飲装置
を製作する必要があると思われる.
第7章:
物体の判別特性に関して,原理の解明,最適化が行われていない.本章では周波数の変
動が非常に大きく,受容器卖位の議論がし難いことがその問題となっている.また,最適
化については未だ条件,被験者数が尐ない.
また,これは本論文のみならず触覚研究を含めた全ての分野に関わる問題であるが,感
性を扱う場合にその定量的な評価手法が確立されていない.よって,どうしても主観評価
に頼りがちであり,信頼性が低いことが課題である.近年,感性評価の手法については,
青砥らが生理的指標(呼吸,心拍,皮膚電気抵抗,脳波)を用いた定量評価を試みている例[140]
もあるがまだまだ発展途上であり,今後の進展が期待される.
154
謝辞
本当に,本当に多くの方に支えられてここまで辿り着くことができました.
まず,公私に渡り多くの貴重なご指導を頂きました梶本裕之先生に心より感謝いたしま
す.あるときはスタッフとして研究室運営のいろはを,あるときは教育者として学生指導
の方法を,あるときは研究者として本質を見抜く術をそれぞれ教えて頂きました. 先生の
ご助言,ご指導があってこそ,私は本研究を無事まとめ上げることができたのだと強く思
います.
中嶋信生教授,高橋裕樹准教授,下条誠教授,長谷川晶一准教授には,審査を通して多
くの貴重なご意見を頂きました.深く御礼申し上げます.
野嶋琢也先生(現 電気通信大学大学院)には,研究に関して多くの助言を頂きました.先
生の研究に対する真摯な姿勢は私への良い教訓となっております.
青木孝文君,三武裕玄君,永谷直久君,古川正紘君とは,同じ博士後期課程の学生とし
て幅広い議論を行い,多くの知見と刺激を共有させて頂きました.私は研究室内で唯一の
博士後期課程だったため,同じ立場で議論ができる場があったことは非常に有り難いこと
でした.
研究室の後輩である小島雄一郎君,中田五月君,加藤弘君,石井明日香さんとは,多く
の研究題目を共に遂行してきました.彼らの斬新な視点や高い行動力で研究を進めていく
様は私にとって勉強になることが多く,大きな助けとなりました.特に第4章は中田五月
君との共同研究によって得られた成果であり,本研究に大きく貢献しています.
梶本研究室の秘書である生田涼子さんには,出張や物品購入等で大変お世話になりまし
た.心より謝意を表します.
他,私に容赦なくプレッシャーをかけ,突き上げてくれた後輩の皆さん,どうもありが
とうございました.みなさんの溢れるエネルギーを目の当たりにしたおかげで,現状に満
足することなく上を目指す,いわゆる“背伸び”の状態を維持し続けることができました.
ここに名前を挙げた方の他に,稲見研究室の皆様,ロボメカ工房の皆様など,数え切れ
ないほど多くの方に日頃から支えていただき,また苦楽を共にする喜びを頂きました.暑
くお礼申し上げます.
155
関連発表
論文
1.
橋本,大瀧,小島,永谷,三谷,宮島,山本,稲見:Straw-like User Interface:吸飲感
覚提示装置,日本バーチャルリアリティ学会論文誌,Vol.11 No.2,pp.347-356,2006.(in
Japanese)
2.
橋本,中田,梶本:Hi-Fi 触覚提示に関する研究:ハードウェアの基礎的検討,日本バ
ーチャルリアリティ学会論文誌,Vol.14 , No.4, pp.491-499, 2009.(in Japanese)
国際学会(査読付き国際会議)
3.
Y.Hashimoto, M.Kojima, T.Mitani, S.Miyajima, N.Nagaya, J.Ohtaki, A.Yamamoto and
M.Inami, "Straw-like User Interface", 1st EUJAPAN FORUM 2005 on the Promotion of
European and Japanese Culture and Traditions in Cyber-Societies and Virtual Reality, Laval
Virtual 2005, France Laval, 2005/4/18-19.
4.
Y.Hashimoto, M.Kojima, T.Mitani, S.Miyajima, N.Nagaya, J.Ohtaki, A.Yamamoto and
M.Inami, "Straw-like User Interface", SIGGRAPH2005 emerging technologies, Los Angeles
USA, 2005/7/29-8/4.
5.
Y.Hashimoto, N.Nagaya, M.Kojima, S.Miyajima, J.Ohtaki, A.Yamamoto, T.Mitani and
M.INAMI, "Straw-like User Interface: Virtual experience of the sensation of drinking using a
straw", Proceedings of ACM SIGCHI ACE 2006, Hollywood USA, 2006/6/14-16.
6.
Y. Hashimoto, H. Kajimoto: A Novel Interface to Present Emotional Tactile Sensation to a Palm
using Air Pressure, in Proceeding of the 26th annual CHI conference (CHI2008), pp.2703-2708,
Firenze, Italy, 2008/4/5-10.
7.
Y. Hashimoto, M. Iinami, H. Kajimoto: Straw-like User Interface (II): a new method of
presenting auditory sensations for a more natural experience, Euro Haptics 2008, pp.484-493,
Madrid, Spain, 2008/6/10-13.
8.
Y. Hashimoto, H. Kajimoto: Emotional Touch: A Novel Interface to Display "Emotional"
Tactile Information to a Palm, SIGGRAPH2008 New Tech Demos, Los Angeles, USA,
2008/8/11-15.
9.
Y. Hashimoto, H. Kajimoto: An Emotional Tactile Interface Completing with Extremely High
Temporal Bandwidth, SICE Annual Conference 2008, Chofu, Japan, 2008/8/20-22.
156
10. Y. Hashimoto, S. Nakata, H. Kajimoto: Novel Tactile Display for Emotional Tactile Experience,
Int. Conf. on Advances in Computer Entertainment Technologies (ACE2009), Athens, Greece,
2009/10/29-31.
国内学会
11. 橋本,小島,永谷,三谷,宮島,稲見:Straw-like User Interface(SUI):吸飲感覚提示装
置,インタラクション 2005 論文集,pp.81-82,2005/2/28-3/1.
12. 橋本,小島,三谷,宮島,永谷,山本,大瀧,稲見:Conspiratio(コンスピラチオ):吸
飲感覚提示によるインタラクティブなエンタテインメント,第1回エンタテインメン
トコンピューティング研究会,情報処理学会研究報告 2005-EC-1,pp.9-12,東京工業大
学,2005/6/4.
13. 橋本,梶本:空気圧を利用した手掌部への``やわらか``な物質感提示手法,WISS 2007,
長崎
ハウステンボス,2007/12/05-07.
14. 橋本,梶本:生物感提示装置,インタラクション 2008,東京 学術総合センター/一橋
記念講堂,2008/3/03-04.
15. 橋本, 中田, 梶本:Emotional Touch; Hi-Fi 触覚提示に関する研究(第3報)- 圧力のフィー
ドバック制御, 日本バーチャルリアリティ学会 第 13 回大会論文集
奈良
奈良先端
科学技術大学院大学, 2008/9/24-26.
16. 中田, 橋本, 梶本:鼓動・呼吸運動を模した触覚刺激による生物感の提示, エンターテ
イメントコンピューティング 2008,金沢
金沢歌劇座,2008/10/29-31.
17. 橋本,梶本:スローモーション触覚再生装置,インタラクション 2009,東京 学術総
合センター/一橋記念講堂,2009/3/05-06.
18. 橋本,梶本:触覚のスローモーション再生における知覚特性,日本バーチャルリアリ
ティ学会 第 14 回大会論文集,東京 早稲田大学,2009/9/9-11.
実演展示(海外)
19. Y.Hashimoto, M.Kojima, T.Mitani, S.Miyajima, N.Nagaya, J.Ohtaki, A.Yamamoto and
M.Inami, "Conspiratio", Laval Virtual 2005, 2005/4/20-24.
20. Y.Hashimoto, M.Kojima, T.Mitani, S.Miyajima, N.Nagaya, A.Yamamoto, J.Ohtaki and
M.Inami, "Conspiratio", ARS Electronica 2005, ARS Electronica Center, Austria Linz,
2005/8/30-2006/9/8.
21. Y.Hashimoto, N.Nagaya, M.Kojima, S.Miyajima, J.Ohtaki, A.Yamamoto, T.Mitani and
M.Inami, "Straw-like User Interface: Virtual experience of the sensation of drinking using a
straw", Proceedings of ACM SIGCHI ACE 2006, Hollywood USA, Jun.2006.
22. Y.Hashimoto, N.Nagaya, M.Kojima, S.Miyajima, J.Ohtaki, A.Yamamoto, T.Mitani and
M.Inami,"Conspiratio", WIRED NextFest2006, New York USA, 2006/9/29-10/1.
157
23. Y.Hashimoto, N.Nagaya, M.Kojima, S.Miyajima, J.Ohtaki, A.Yamamoto, T.Mitani and
M.Inami, "Conspiratio: A novel installation which presents the sensation of drinking", World
haptics 2007, Tukuba Japan, 2007/3/22-24.
実演展示(国内)
24. 橋本,大瀧,小島,永谷,三谷,宮島,山本,稲見:Straw-like User Interface,インタ
ラクティブ東京 2005, 東京 日本科学未来館, 2005/8/25-26.
25. 橋本,大瀧,小島,永谷,古川,三谷,宮島,山本,稲見:Conspiratio,デジタルアー
トフェスティバル 2005,東京 パナソニックセンター東京,2005/12/9-13.
26. 橋本,大瀧,小島,永谷,三谷,宮島,山本,稲見:Conspiratio,第 9 回メディア芸術
祭/学生 CG コンテスト,東京 写真美術館,2006/2/24-3/5.
27. 橋本,中田,梶本:Emotional Touch,インタラクティブ東京 2008, 東京 日本科学未来
館, 2008/9/13-14.
記事
28. 稲見,橋本:五感工学の最先端-食感の技術,映像情報メディア学会誌 Vol.61 No.10,
pp.28-30,2007.
講演
29. 橋本,大瀧,小島,永谷,三谷,宮島,山本,稲見:吸飲感覚に見る口部感覚提示の
可能性, 画像電子学会第 34 回年次大会,2006/6/22.
30. 橋本,大瀧,小島,永谷,三谷,宮島,山本,稲見:-インタラクティブって何だろう?
−,アットマークプロジェクト×学生 CG コンテスト,アキバ 3D シアター,2006/9/7.
31. 橋本:吸飲感覚提示装置,PTT: Programming Tools and Techniques,電気通信大学,
2008/1/17.
特許
32. 橋本,三谷,稲見昌彦,吸引に基づく情報提示装置 特願 2005-098884
33. 橋本,梶本,触覚情報提示装置
特願 2008-145988
受賞
34. ベストインタラクティブ発表賞,2005/2/28, Straw-like User Interface(SUI):吸飲感覚提
示装置,インタラクション 2005,橋本,小島,永谷,三谷,宮島,稲見
35. 奨励賞,2006/2/24,Conspiratio,第 9 回文化庁メディア芸術祭,橋本,大瀧,小島,永
谷,三谷,宮島,山本,稲見
36. 佳作,2006/2/24,Conspiratio,第 11 回学生 CG コンテスト,橋本,大瀧,小島,永谷,
158
三谷,宮島,山本,稲見
37. Excellent Paper Prize,2006/6/16,Straw-like User Interface: Virtual experience of the sensation
of drinking using a straw,ACM SIGCHI ACE 2006, Y.Hashimoto, N.Nagaya, M.Kojima,
S.Miyajima, J.Ohtaki, A.Yamamoto, T.Mitani and M.Inami
38. 対話発表賞,2007/12/07,空気圧を利用した手掌部への”やわらか”な物質感提示手法,
WISS 2007,橋本,梶本
39. 対話発表賞,2007/12/07,水平振動を用いた机上群ロボットシステム,WISS 2007,福
嶋,橋本,梶本
40. インタラクティブ発表賞,2008/3/04,生物感提示装置,インタラクション 2008,橋本,
梶本
41. インタラクティブ発表賞,2009/3/06,スローモーション触覚再生装置,インタラクシ
ョン 2009,橋本,梶本
42. 学術奨励賞,2010/3/30,触覚のスローモーション再生における知覚特性,日本バーチ
ャルリアリティ学会 第 14 回大会,橋本,梶本
159
参考文献
[1] Richard, S: “Confessions of a Knife”, Michigan State University Press, 1979.
[2] 小澤,本間,大森,福田,大橋:”標準生理学”,医学書院,2009.
[3] Michael Gershon: “The Second Brain: A Groundbreaking New Understanding of Nervous
Disorders of the Stomach and Intestine”, Harper Paperbacks; HarperPerennial, 1999.
[4] 傳田光洋:第三の脳――皮膚から考える命,こころ,世界,朝日出版社,2007.
[5] Vernon B. Mountcastle: “The Sensory Hand”, Harvard University Press, 2005.
[6] Hart CB and Giszter SF: Modular premotor drives and unit bursts as primitives for frog motor
behaviors, J. Neuroscience 24(22):5269-82, 2004.
[7] G Grubauer, KR Feingold, RM Harris and PM Elias: Lipid content and lipid type as
determinants of the epidermal permeability barrier, J. Lipid Res, 30: 89-96, 1989.
[8] 岩村:能動的触知覚(アクティヴタッチ)の生理学,バイオメカニズム学会誌,Vol.31, No.4,
2007.
[9] Augmented Reality のための爪装着型触覚ディスプレイの研究,電子情報通信学会論文
誌, Vo.J87-D-II, No.11, pp.2025-2033, 2004.
[10] 大海悠太, 池上高志:ニューラルネットワークと触覚ディスプレイを用いたアクティブ
タッチの研究 ~ 「うねうね」と「ざらざら」の触感の構成 ~, 信学技報, vol.109, No.83,
HIP2009-51, pp.17-21, 2009.
[11] Bensma¨ıa, S. J., Killebrew, J. H. and Craig, J. C.: Influence of visual motion on tactile motion
perception. Journal of Neurophysiology, 96, 1625-1637, 2006.
[12] Soto-Faraco, S., Lyons, J., Gazzaniga, M., Spence, C. and Kingstone, A.: The ventriloquist in
motion : Illusory capture of dynamic information across sensory modalities. Cognitive Brain
Research, 14, 139-146, 2002.
[13] Suzuki,Y. and Gyoba, J.: Effects of touch-irrelevant sounds on the tactile roughness perception
of textured surfaces. Technical Report of IEICE, Vol.107, No.332, pp19-22, 2007.
[14] 神尾, 松浦, 正井, 新田 :マルチモーダル対話システム MultiksDial, 電子情報通信学会
論文誌, D-II, Vol. J77-D-II, No. 8, pp. 1429-1437, 1994.
[15] 曽根順治,市吉芳,成瀬五月,久米祐一郎:マルチモーダルインターフェイスによる
3次元仮想作業性の向上,日本バーチャルリアリティ学会第 6 回大会論文集,pp.177-178,
2001.
[16] 大槻麻衣,木村朝子,西浦敬信,柴田史久,田村秀行:複合現実空間との新しいマル
チモーダル・インタラクション方法の提案と実現,日本バーチャルリアリティ学会論
160
文誌,Vol.13, No.2, pp.247-256, 2008.
[17] Anatole L´ecuyer, Sabine Coquillarty, Abderrahmane Kheddar: Pseudo-Haptic Feedback : Can
Isometric Input Devices Simulate Force Feedback?, IEEE Int. Conf. on Virtual Reality, pages
83-90, New Brunswick, US, 2000.
[18] 小川博教:材質感呈示システムに関する研究-触覚による布地材質感の提示-,電気
通信大学大学院博士論文,2007.
[19] 昆陽雅司,田所諭,高森年,小黒啓介,徳田献一,高分子ゲルアクチュエータを用い
た布の手触り感覚を呈示する触覚ディスプレイ,日本バーチャルリアリティ学会論文
誌,Vol.6, No.4, pp.323-328, 2001.
[20] 下条誠,仁木亨,高速応筓が可能な可搬型ハプティクスディスプレイの開発,電子情
報通信学会論文誌, DII, Vol.J87-D-II, No.5, pp.1-9, 2004.
[21] A. Chang, S. O’Modhrain, R. Jacob, E. Gunther and H. Ishii: ComTouch: design of a
vibrotactile communication device; Proc. 4th conference on Designing interactive systems:
processes, practices, methods, and techniques, pp.312-320, 2002.
[22] Immersion Corp.: VibeTonz System, http://www.immersion.com/mobility/
[23] Sinclair D: Cutaneous sensation, London, Oxford Univ Press, 1967.
[24] Weber EH: The Sense of Touch,ppl39-264,Academic Press,New York, 1978.
[25] Katz D: Der Aufbauder Tastwelt, Barth, Leiptig, 1925.
[26] Gibson JJ: Observations on active touch, Psychol Rev 69, pp.477-490, 1962.
[27] Gibson JJ: The senses considered as perceptual systems, Houghton Mifflin, Boston, 1966.
[28] Benjamin, J.M.: The new C-5 laser cane for the blind. Carnahan conference on the Electric
Prosthetics, 77-82, 1973.
[29] 清水豊,和気典二:聴覚による盲人用視覚代行器に関する基礎的研究,人間工学会誌,
Vol.17, No.6, 277-284, 1981.
[30] 和田親宗,庄司寿一,伊福部達:異なる触感を利用した聴覚代行方式の提案,ヒュー
マンインタフェース学会誌, vol.1, no.3, 29-34, 1999.
[31] 篠原正美,清水豊,長岡英司:視覚障害者のための触覚によるGUI支援,人間工学
会誌,Vol.39(Sup), 67-68. 2003.
[32] 大内,倉田,橋本:人工の手を用いたコミュニケーションシステム,電子情報通信学
会総合大会講演論文集
1996 年_基礎・境界,1996.
[33] 廣瀬通孝,小木哲朗,広田光一,齋藤允:ウェアラブルフォースディスプレイを用い
た触覚コミュニケーション,日本機械学会 2000 年度年次大会講演論文集,Vol.II,
pp.457-458,2000.
[34] H. Mochiyama, T. Dohda, H. Kobayashi, J. Tatsuno and H. Kawai: Macro-Micro
Tele-Manipulation System Based on Body Image Embedding with Contact Feel, Spatial Motion
and Stereo Vision, Proceeding of 18th IEEE International Symposium on Robot and Human
161
Interactive Communiation, 2009.
[35] 任天堂:振動パック,http://www.nintendo.co.jp/n01/n64/option/sindop.html
[36] 白井暁彦,佐藤勝,草原真知子,久米祐一郎:足インターフェイスによる複合現実感
アミューズメントシステム: ファンタスティックファントムスリッパ,日本バーチャル
リアリティ学会論文誌,4 巻,4 号,pp.691-697, 1999.
[37] 橋本, 岩田:危険領域の力覚表現による手術支援環境,VRSJ 第2回大会論文集,
pp.39-42, 1997.
[38] 生田幸士,島田隆之,石塚健次,中山曜:力覚付き遠隔腹腔内システムの研究(第3報)
新型スレーブ鉗子の開発と動物実験,第17回日本ロボット学会学術講演会予稿集
(vol.2),pp.679-680,1999.
[39] 田村信彦,津村徳道,三宅洋一,田辺政裕,山浦晶:ハプティック・テクスチャを用
いた医療トレーニングシステムの開発,VR 医学, 3(1)30-37, 2004.
[40] Apple Inc.: iPhone, http://www.apple.com/jp/iphone/
[41] 小方厚:音律と音階の科学―ドレミ…はどのようにして生まれたか,講談社,2007.
[42] 澁谷達明 ・市川眞澄:匂いと香りの科学,朝倉書店,2007.
[43] 都甲潔 :味覚を科学する,角川書店,2002.
[44] Noisezewski, J.: Gazeta Lekarska. IX, 24, Ser. II, 1018-1022, 1879.
[45] Bliss, J. C., Crane,H. D. and Tounsend, J. T.: Tactile perception of sequential presented spatial
patterns, Perception and Psychophysics, 1, 125-130, 1966.
[46] L.H. Goldish and H.E. Taylor, "The Optacon: A Valuable Device for Blind Persons", NEW
OUTLOOK FOR THE BLIND, the American Foundation for the Blind, pp. 49-56, 1974.
[47] Collins, C. C. and Saunders, F. A.: Tactile television: Electro-cutaneous perception of pictorial
images Abstracts of the Neuroelectric Conference, 5, 26-28, 1969.
[48] Bach-y-Rita, P.: Brain mechanisms in sensory substitution, Academic Press, New York, 1972.
[49] ケージーエス株式会社:Dot View DV-2,http://www.kgs-jpn.co.jp/b_dv2.html
[50] 梶本裕之,川上直樹,前田太郎,舘暲,“電気触覚ディスプレイにおける能動触”
日
本バーチャルリアリティ学会第 6 回大会論文集,pp.489-490,2001.
[51] 梶本裕之,菅野米蔵,舘暲:額に装着する電気触覚ディスプレイ,日本バーチャルリ
アリティ学会第!! 回大会論文集,pp.185-188,2006.
[52] NHK 放送技術研究所:高精細触覚ディスプレイ,
http://www.nhk.or.jp/strl/open2005/tenji/t26.html
[53] Robinett, W.: Interactivity and Individual Viewpoint in Shared Virtual Worlds, The Big Screen
vs. Networked Personal Displays, Computer Graphics, 28(2), 127, 1994.
[54] Morton Heiling: sensorama, 1962.
[55] Tomas H. Massie and J. K. Salisbury: The PHANToM Haptic Interface: A Deice for Probing
Virtual Objects, Procedings of the ASME Winter Annual Meeting, Symposium on Haptic
162
Interfaces for Virtual Environment and Teleoperator Systems, Chicago, IL, Nov, 1994.
[56] Tomas H. Massie: Vitual Touch Through Point Interaction, International Conference on
Artificial Reality and Telr-existence, pp.19-38, 1996.
[57] Gardiner, H. G., Metcalf, R. G. and Bebbe-Center, J. G.: Feeling and emotion, American Book,
New York, 1937.
[58] 山口創:皮膚感覚の不思議,ブルーバックス,講談社,2006.
[59] Tichener, E. B.: Lectures on the elementary psychology of feelings and affection, Macillan,
New York, 31, 1908.
[60] Tichener, E. B.: Notes from the psychological laboratory of Cornell University, American
Journal of Psychology, New York, 31, 212-214, 1920.
[61] 浜治世:触感の研究―briht pressure と dull pressure および乳癌患者のロールシャッハ濃
淡反応
文京女子大学紀要(人間学部),1, 109-138, 1997.
[62] 浜治世,三根浩,片岡朗:粗さの異なる触覚刺激によって喚起される感情の評価,関
西心理学会第 90 回大会発表論文集,1978.
[63] 大山正, 今井省吾, 和気典二: 新編感覚・知覚心理学ハンドブック. 誠信書房, 1994.
[64] 岩村吉晃. タッチ. 医学書院, 2001.
[65] Robert F. Schmid(岩村吉晃他訳):感覚生理学第 2 版,金芳堂,1991.
[66] Johansson, R. S. and Vallbo, A. B.: Tactile sensory coding in the glabrous skin of the human
hand, Trends in Neuroscience, 6, 27-32, 1983.
[67] Weinstein, S.: “Intensive and extensive aspects of tactile sensitivity as a function of body part,
sex, and laterality”, The Skin Senses, pp.223-261, 1968.
[68] M. Konyo, K. Akazawa, S. Tadokoro, and T. Takamori. Tactile feel display for virtual active
touch. In Proc. of IEEE Inte. Conf. on Intelligent Robotics and Systems, pp. 3744–3750, Oct.
2003.
[69] J. R. Phillips and K. O. Johnson. Tactile spatial resolution iii. a continuum mechanics model of
skin predicting mechanoreceptor responses to bars, edges, and gratings. J.Neurophysiol., Vol.
46, No. 6, pp. 1204–1225, Dec. 1981.
[70] F. Vega-Bermudez and K. O. Johnson. Sa1 and ra receptive fields, responcse variability, and
population responses mapped with a probe array. Am. Physiol. Soc., pp. 2701–2710, 1999.
[71] S.J.Bolanowski,Jr., G.A. Gescheider, R.T. Verrillo and C.M. Checkosky, Four channels mediate
the mechanical aspects of touch, J.Acoust.Soc.Am.84(5), pp.1680-1694, 1988.
[72] 山本, 高崎, 樋口: 超薄型静電アクチュエータを用いた触感インタフェース ; SICE
SI2000 講演論文集, pp.59-60, 2000.
[73] 佐藤誠,平田幸広,河原田弘: 空間インタフェース装置 SPIDAR の提案; 電子情報通信
学会論文誌,Vol.J74-D-2, No.7, pp.887-894 , 1991.
[74] オメガハウス:スライム,http://www.megahouse.co.jp/megatoy/product/variety/others01.html
163
[75] h-concept.Co.,Ltd.: カオマル, http://www.plus-d.com/caomaru/sub.html
[76] BANDAI CO LTD.:∞プチプチ,http://www.asovision.com/putiputi/
[77] Y. Kojima, Y. Hashimoto and H. Kajimoto: Eternal Sharpener - A Rotational Haptic Display
that Records and Replays the Sensation of Sharpening a Pencil, IEEE RO-MAN2009
Interactive Oral Sessions, 2009.
[78] S.Ooshima, Y.Hashimoto, H.Ando, J.Watanabe and H.Kajimoto: Simultaneous Presentation of
Tactile and Auditory Motion to the Abdomen to Present the Feeling of Being Slashed, SICE
Annual Conference 2008, 2008.
[79] T. Amemiya, Y. Tanaka and H. Shinohara: Portable Tactile Display Using Air Jet; The 4th
annual conference of the virtual reality society of Japan, pp.41-44, 1999.
[80] H. Iwata, H. Yano and N. Ono: Volflex; SIGGRAPH2005 Emerging technologies, 2005.
[81] 斎田真也:ソレノイド型視覚代行器,製品科学研究所研究報告 95, 21-29, 1982.
[82] 水上陽介,澤田秀之:形状記憶合金糸を用いた触覚ディスプレイと微小振動の発生確
率密度制御による触覚感覚の呈示,情報処理学会論文誌,Vol.49 No.12, 2008.
[83] 牧野泰才,篠田裕之: “吸引圧刺激による触覚生成法,”日本バーチャルリアリティ学
会論文誌, Vol. 11, No.1, pp. 123-132, 2006.
[84] 山岡正明, 山本晃生, 樋口俊郎:真空吸引圧を用いた粘着摩擦感の再現提示に関する研
究,日本バーチャルリアリティ学会第 13 回大会論文集 , pp. 477-480, 2008.
[85] Vormbrock, J. K. and Grossberg, J. M.: Cradiovascular effects of human-pet dog interactions,
Journal of Behavioral Medicine, 11, 509-517, 1988.
[86] Tiger Electronics: Furby, http://www.hasbro.com/furby/
[87] T. Tamura, S. Yonemitu, A. Itoh, D. Oikawa, A. Kawakami, Y. Higa-shi, T. Fujimooto and K.
Nakajima: Is an entertainment robot useful in the care of elderly people with severe dementia?,
The Journals of ger-ontology, vol 59.1, pp.83-85, 2004.
[88] K. Wada, T. Shibata, T. Saito and K. Tanie: Effects of Robot Assisted Activity for Elderly
People at Day Service Center and Analysis of Its Factors, Proc. 4th World Congress on
Intelligent Control and Automa-tion, pp.1301-1305, 2002.
[89] UGOBE Inc.: Pleo, http://www.pleoworld.com/
[90] 中田亨:ペット動物の対人心理作用のロボットにおける構築,東京大学大学院工学系
研究科博士課程先端学際工学専攻博士論文,2001.
[91] S. Yohanan, M. Chan, , J. Hopkins, H. Sun, K. E. MacLean.: Hapti-cat: Exploration of
Affective Touch, Proc. 7th International Confe-rence on Multimodal Interfaces, ICMI'05,
pp.222-229, 2005.
[92] 橋本, 梶本: 空気圧を利用した手掌部への``やわらか``な物質感提示手法; WISS 2007,
pp.167-168, 2007.
[93] 橋本, 梶本: 生物感提示装置; インタラクション 2008, pp.159-160, 2008.
164
[94] Y. Hashimoto and H. Kajimoto: A novel interface to present emotional tactile sensation to a
palm using air pressure; CHI '08 extended abstracts on Human factors in computing systems,
pp.2703-2708, 2008.
[95] 本川達雄:ゾウの時間 ネズミの時間 サイズの生物学 中公新書,pp.3-7,1992.
[96] 松山義則,浜治世:感情心理学第 1 巻,誠信書房,1974.
[97] Y. Hashimoto and H. Kajimoto: Emotional Touch: A Novel Interface to Display "Emotional"
Tactile Information to a Palm; SIGGRAPH2008 New Tech Demos, 2008.
[98] 橋本,中田,梶本:Emotional Touch,インタラクティブ東京 2008, 2008.
[99] 中田, 橋本, 梶本:鼓動・呼吸運動を模した触覚刺激による生物感の提示, エンターテ
イメントコンピューティング 2008,2008.
[100]
松村明:大辞林 第二版,三省堂,1999.
[101]
Scott Brave, H. Ishii, and A. Dhley: Tangible interfaces for remote collaboration and
communication; Proc. ACM conference on Computer supported cooperative work, pp. 169-178,
1998.
[102]
N. Shimizu, N. Koizumi, M. Sugimoto, H. Nii, D. Sekiguchi and M. Inami: A
teddy-bear-based robotic user interface; Computers in Entertainment Volume 4 Issue 3, 2006.
[103]
S. Ozawa, T. Abe, T. Ogawa, M. Ogawara, M. Hirano and K. Tanaka: Tangible-3D: Hand
Shaking Model; CHI '08 extended abstracts on Human factors in computing systems,
pp.2303-2308, 2008.
[104]
NVIDIA Corporation: PhysX, http://www.nvidia.com/object/physx_new.html
[105]
Havok.com Inc: Havok Physics, http://www.havok.com/index.php?page=havok-physics
[106]
Brett Ratner: X-Men: The Last Stand, http://movies.foxjapan.com/x-menfinal/
[107]
David
Yates:
Harry
Potter
and
the
Order
of
the
Phoenix,
http://www.harrypotterorderofthephoenix.com/
[108]
Valve Software: Half-Life 2, http://orange.half-life2.com/
[109]
Electronic Arts Inc.: Mirror’s Edge, http://mirrorsedge.jp/
[110]
Anphora Aromatics Ltd., http://amphora-aromatics.com/
[111]
やおきん:うまい棒,http://www.yaokin.com/
[112]
浅野武夫,矢野博明,岩田洋夫:フォースディスプレイを用いた仮想環境におけ
る手術シミュレーションの要素技術開発,日本バーチャルリアリティ学会第 1 回大会
論文集,pp.95-98, 1996.
[113]
野嶋琢也,関口大陸,稲見雅彦,舘暲:触覚におけるオーグメンテッドリアリテ
ィの研究(第 1 報)
~Smart Tool による実作業支援~,日本バーチャルリアリティ学会
第 11 大会回論文集,2001.
[114]
野嶋琢也,関口大陸,稲見雅彦,舘暲:力覚提示を利用した実時間実環境作業支
援システムの提案,日本バーチャルリアリティ学会論文誌,Vol.7, No.2, pp.192-199,
165
2002.
[115]
川崎,毛利:対向型ハプティックインターフェイス,日本ロボット学会誌,Vol.23,
No.4, pp.449-456, 2005.
[116]
筧直之,矢野博明,斉藤充,小木哲朗,廣瀬通孝:没入型仮想空間における力覚
提示デバイス HapticGEAR の開発とその評価,日本バーチャルリアリティ学会論文誌,
Vol.5, No.4, pp.1113-1120, 2000.
[117]
岩田洋夫,中川隆志:着用型力覚帰還ジョイスティック,HumanIntaerface N&R,
Vol13, No.2, pp.135-138, 1998.
[118]
Immersion Cop., Cyber Grasp, http://www.immersion.com/3d/products/cyber-grasp.php
[119]
須佐 育弥, 長谷川 晶一: `解析法の物理シミュレータのための局所的な動力学計
算を行う力覚レンダリング', ヒューマンインタフェース学会研究報告集, Vol.10, No.2,
pp.57-62, 2008.
[120]
I. Susa, Y. Ikeda, T. Tokizaki, H. Mitake, M. Sato and S. Hasegawa: Perception-based
high definition haptic rendering; SIGGRAPH2008 New Tech Demos, 2008.
[121]
稲葉, 藤田:指先圧迫による擬似反力提示装置の提案と試作, 日本バーチャルリア
リティ学会論文誌,Vol.12, No.1, pp. 95-102, 2007.
[122]
单澤孝太, 深町聡一郎, 梶本裕之, 川上直樹, 舘暲:バーチャルな物体の質量およ
び内部ダイナミクスを提示する装着型触力覚ディスプレイ, 日本バーチャルリアリテ
ィ学会論文誌, Vol.13, No.1, 2008.
[123]
Y.Sekiguchi, K.Hirota, M.Hirose: The Design and Implementation of Ubiquitous Haptic
Device; Proc. World Haptics Conference 2005, pp. 257-258, 2005.
[124]
和田親宗, 久保卓也, 堀尾寛, “温度刺激を用いた触覚ディスプレイの開発研究-仮
現運動と知覚特性との関係.” -,感覚代行シンポジウム, Vol33, pp97-100, 2007.
[125]
本間達,若松秀俊,張暁林:粘弾性体モデルで表現した仮想物体の構築と加工,
電学論 Vol.119-C , No.12,1437-1443, 1999.
[126]
本間達,若松秀俊:力覚表示システムに応用可能なノコギリの切離モーメントの
算出,日本バーチャルリアリティ学会論文誌,Vol.9,No.3,319-326, 2004.
[127]
ZAMPINI Massimiliano and SPENCE Charles: The role of auditory cues in modulating
the perceived crispness and staleness of potato chips, Journal of sensory studies, vol. 19, no5,
pp. 347-363, 2004.
[128]
森谷哲朗, 矢野博明, 岩田洋夫: 食感呈示装置の開発, 日本バーチャルリアリティ
学会第8回大会論文集 pp.17-20, 2004.
[129]
[130]
http://www.imaemon.co.jp/ironabeshima/14daiimaemon/essay17.html
J.Laroche and M.Dolson: New phase-vocoder techniques for pitch-shifting, harmonizing
and other exotic effects, Proc. 1999 IEEE Workshop on Applications of Signal Processing to
Audio and Acoustics, 1999.
166
[131]
E. Ravelli, M. B. Sandler and J.P. Bello: Fast implementation for non-linear time-scaling
of stereo signals, In Proceedings of the 8th Conference on Digital Audio Effects, 2005.
[132]
カシオ計算機:EXILIM EX-F1,http://dc.casio.jp/product/exilim/ex_f1/
[133]
スティーブン・ドルトン:瞬間をとらえる―生物のハイスピード写真集, 小学館, 1983.
[134]
Sam Peckinpah: The Wild Bunch, 1969.
[135]
昆陽雅司, 赤澤 和伸, 田所 諭, 高森年, 能動触を考慮した装着型 ICPF 触感ディス
プレイの研究,日本バーチャルリアリティ学会第 7 回大会論文集, pp.445-448, 2002.
[136]
NHKEngineering Services, Inc.: 昆虫マイク,http://www.nes.or.jp/transfer/idea_02.html
[137]
橋本,梶本:スローモーション触覚再生装置,インタラクション 2009, 2009.
[138]
橋本,梶本:触覚のスローモーション再生における知覚特性,第14回日本バー
チャルリアリティ学会大会論文集, 2009.
[139]
藤田,入江,中西,大田:やわらかさに関する感性情報処理,電子情報通信学会
技術研究報告. HIP, ヒューマン情報処理,2005.
[140]
青砥哲朗:インタラクティブシステムの感性評価に関する研究,博士学位論文,
2009.
167
© Copyright 2026 Paperzz