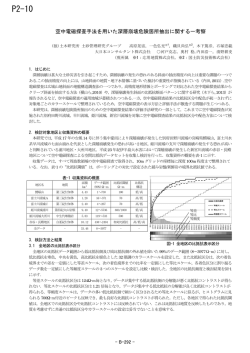
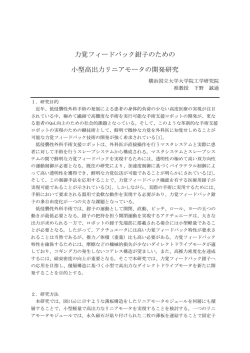
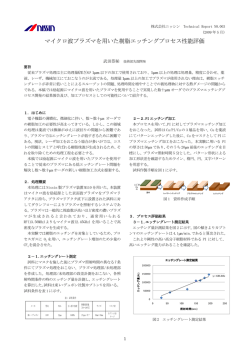
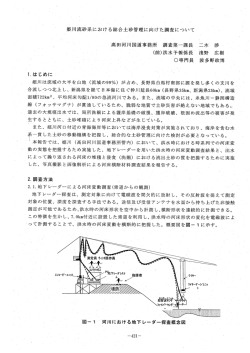
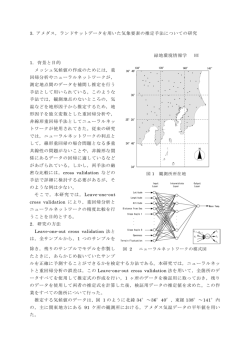
<第 13 回 ITS シンポジウム 2015> プローブデータを用いた 高速道路を対象とした異常事象時の旅行時間推定 関塚貴一*1 三谷卓摩*1 益田卓朗*2 永井慎一*2 桑原雅夫*1 東北大学大学院情報科学研究科*1 本田技研工業株式会社*2 本研究は,プローブカーデータを用いて,高速道路の事故時における異常事象の検出と旅行時間の予測手 法を提案するものである.交通事故に代表される異常事象時においては,一般利用者にとって,交通状況の 現況や予測情報のニーズが高い一方,平常時と比べて稀な状況における現況把握や予測手法は,まだ確立さ れていない.本研究は,プローブカーの走行軌跡データのみから事故時の渋滞延伸状況を解析することによ り,旅行時間を予測する手法を提案する.旅行時間の予測については,首都高速道路の事故渋滞を用いて検 証した結果,現行手法に比べて精度の良い予測結果が得られた. Estimating Travel Time during Incidents on Expressway Using Probe Data Kiichi SEKIZUKA*1 Takuma MITANI*1 Takuro MASUDA*2 Shinichi NAGAI*2 Masao KUWAHARA*1 Graduate School of Information Science, Tohoku University *1 Honda Motor Co., Ltd. *2 This study proposes a method that detects an incident and predicts travel time during incidents on an expressway using probe car data. Though people would like to know what time they arrive at their destination whenever they face incidents such as traffic accidents, travel time during incidents has not been well provided. We therefore propose a technique to predict travel time based on the shockwave propagation during an incident using probe car trajectories. Applications of the method to the Metropolitan expressway confirm that the proposed technique produces the better travel times than the conventional method. Keyword: Travel Time Estimation, Probe Vehicle, Shockwave Theory はじめに カーナビゲーションシステムなどによる旅行時間 情報の提供は,ドライバの意思決定や心理的負担軽 減に有効である.特に,事故に代表される異常事象 発生時など,道路交通状況が急激に変化する場面で は,正確な旅行時間情報提供に対するニーズが高い と考えられる.しかしながら,異常事象は,発生頻 1 度が低い希少事象であり,過去の交通状況から旅行 時間を予測することが難しい.さらに,車線の閉塞 に起因する急激な容量低下や,事故地点を避ける車 両の存在による需要変化など,平常時と異なる現象 も存在し,旅行時間予測に大きな影響を与えると考 えられる. そこで,本研究ではプローブデータのみを用いた 異常事象時の旅行時間推定手法を構築し,首都高速 道路への適用を試みた. 2 既存研究の整理 旅行時間予測および異常事象時を対象とした研究 について整理する.旅行時間予測に関する研究では, 例 え ば Work et al.1) は , 速 度 に 変 換 し た Cell Transmission Model に対して,プローブの速度データ を使用し,アンサンブルカルマンフィルタによって 旅行時間の推定結果をリアルタイムに改善する手法 を提案している.また,Chen et al.2)は,プローブデ ータの旅行時間の変動を,過去の蓄積データの旅行 時間の変動と比較し,類似性の高い過去のアーカイ ブデータを抽出することで,旅行時間を予測する手 法を提案している.ただし,これらの研究では,平 常時や異常事象時など,分析対象とする状況を明示 的に区別していないため,異常事象発生時などの特 殊な交通状態下での旅行時間予測の結果や精度検証 については言及していない.また,発生頻度が低く, 様々な地点で発生する異常事象について,アーカイ ブデータを蓄積することは難しい.一方,異常事象 時を対象とした研究には,例えば Domenichini et al.3) は,車両感知器データを用いて,事故による遅れ時 間を推定するモデルを構築し,平常時の旅行時間に その遅れ時間を上乗せすることで,旅行時間を予測 している.また,大畑ら 4)は,車両感知器とプロー ブデータを組み合わせて,交通流理論の枠組みを用 いて渋滞の延伸を推定することによって,旅行時間 を予測している.ただし,これらの手法では,車両 感知器データを用いるため,旅行時間を予測可能な 範囲が,車両感知器の設置箇所に限定される.また, プローブデータと感知器データの双方がリアルタイ ムに入手できる状況であることが条件になる.これ を受けて,三谷ら 5)は,大畑らの枠組みをプローブ データのみにより実装する手法を提案している.し かし,異常事象の発生地点を既知として旅行時間を 予測しており,手法の自動化に課題がある.そこで 本研究は,異常事象事例を対象に,プローブデータ のみを用いて,検出を含めた旅行時間の予測手法を 構築し,その評価を行うことを目的とする. 3 提案手法 3.1 異常事象発生時の交通状況 異常事象発生時のタイムスペース図を図 1 に示す. 異常事象が発生すると,その地点の容量が急激に低 下することでボトルネックとなり,上流に渋滞が延 伸する.渋滞の延伸は,渋滞の末尾点が上流に移動 することと同義であり,これは渋滞の延伸波と呼ば れる.また,後続車両 P が渋滞末尾に到達すると, 渋滞流への突入によって速度が低下する.この速度 が低下する点を,本稿では変曲点 S と定義する.同 様に,事故処理が完了すると容量の低下が改善され, 渋滞の先頭位置が上流に移動する.これは渋滞の解 消波と呼ばれ,速度が回復するこの点を,変曲点 R と定義する. 渋滞の延伸波と渋滞の解消波,さらに異常事象発 生断面に囲まれた領域は,異常事象により発生した 渋滞領域と考えることができる.この渋滞領域を, プローブデータのみを用いて把握することを試みる. 特に,渋滞突入の変曲点 S と渋滞脱出の変曲点 R に 着目し,延伸波と解消波の時間的進展の様子を捉え ることで,渋滞状況を推定し,旅行時間の予測を行 う. 3.2 異常事象検出を含めた旅行時間の予測手順 異常事象時の旅行時間予測を,本研究では 2 段階 で考える.第 1 段階では,異常事象が発生した時刻 と地点の検出を行う.第 2 段階では,検出した異常 事象発生地点をもとに,渋滞の影響を加味した旅行 時間を予測する手法を提案する.ただし,本研究で 検出対象とする異常事象は,事故などの異常事象そ のものではなく,異常事象に起因し,旅行時間に影 響を与える渋滞の発生点とする. 3.3 異常事象の検出手法 本研究では,プローブのみを用いて異常事象を検 出するにあたり,牛木ら 6)による手法(図 2)を援用 する.牛木らの指す異常事象は事故などの突発事象 である.検出に利用するプローブ軌跡は最少 3 本で あり,観測区間内に速度低下が見られたプローブ軌 跡を観測が早い順に P1,P2, そして P1 以前に走行し, かつ速度低下が見られないプローブ軌跡を P0 とす る.また,異常事象の発生点を C0(T0,X0),P1, P2 の変 図1 異常事象時のタイムスペース図 曲点 S を繋いだ渋滞延伸波の伝播速度を u とする. 検出方法は,渋滞延伸波と P0 の走行軌跡の交点を異 常事象発生地点の候補地点とし,判定処理の後に検 出する.ただし,同一の異常事象による影響を分析 するため,P1, P2 , P0 は,異常事象発生地点 C0 と変曲 点 S(𝑠𝑡𝑖 , 𝑠𝑥𝑖 ) の時空間上の距離𝑇0 − 𝑠𝑡1 , 𝑠𝑡2 − 𝑠𝑡1 , 𝑋0 − 𝑠𝑥1 , 𝑠𝑥1 − 𝑠𝑥2 が設定した閾値内であり,かつ延 伸波の伝播速度 u が閾値内である場合にのみ定義さ れる.なお,変曲点 S の抽出方法は,観測されたプ ローブデータについて,現在時刻から過去一定時間 の平均速度の変化を逐次算出し,閾値を上回る速度 変化が確認された場合に,選定している. この手法に対し,本研究では図 3 に示すような改 良を行った.まず,P1,P2 の変曲点 R1,R2 を抽出 し,2 地点の平均から,異常事象の発生断面を特定 する.そして,渋滞延伸波と異常事象発生断面の交 点を,異常事象の発生地点とする.ただし,新たに 変曲点 R 間の距離|𝑟𝑥1 − 𝑟𝑥2 |と,P1 と P0 の時間差 𝑡0 − 𝑠𝑡2 についての閾値を設定した.この手法は,異 常事象による渋滞発生位置の検出精度向上が期待で きる一方,変曲点 R を抽出する処理が追加される. また,変曲点 R の抽出が完了するまで実装できない ため,検出までに時間がかかる.変曲点 S,R の抽 出方法は,図 4 に示すように,閾値𝑤 max, 𝑤 min, 𝑣 std, 𝑡free, 𝑡cong を設定し,以下の処理を行う.まず,得ら れたプローブデータが速度𝑣 std 以上ならば,自由流 内を走行しているものとし,それ以外は渋滞流であ ると仮定する.また,交通状態の連続性を考慮し, 速度𝑤 min 以上の自由流であれば𝑡free,速度𝑤 max 以下の 渋滞流であれば𝑡cong 時間以上同様の交通状態が継続 するものとし,継続しない場合は自由流・渋滞流を 反転させる.これらの処理の後,交通状態の境界と なる観測データを変曲点として抽出した. 3.4 旅行時間の予測手法 旅行時間の予測方法について図 5 に示す.対象区 間の起点を𝑂𝑥 ,終点を𝐷𝑥 とすれば,区間𝑂𝑥 𝐷𝑥 を走行 する車両𝑃i , (i = 1,2, … ) の旅行時間𝑇𝑇𝑖 は,変曲点 S(𝑠𝑡𝑖 , 𝑠𝑥𝑖 ),変曲点 R(𝑟𝑡𝑖 , 𝑟𝑥𝑖 )を用いて,以下式のよ うに定義できる. 𝑇𝑇i = 𝑣𝑓𝑟𝑒𝑒 (𝑠𝑥𝑖 − 𝑂𝑥 ) + 𝑣𝑐𝑜𝑛𝑔 (𝑟𝑥𝑖 − 𝑠𝑥𝑖 ) + 𝑣𝑓𝑟𝑒𝑒 (𝐷𝑥 − 𝑟𝑥𝑖 ) (1) ただし,𝑣 free 𝑣 cong は自由流領域と渋滞流領域を走 行する車両の速度であり,これらは取得されたプロ ーブデータにより決定する. 本研究では,旅行時間予測にあたり,図 6 に示す ように,抽出した変曲点について,最小二乗法によ り衝撃波の傾きを算定し,交通状況を推定すること で予測を行った.ただし,最小二乗法に使用する変 曲点は,現在時刻から過去T 秒間の間に観測された ものに限定する. 図 4 変曲点の抽出方法 図2 牛木らの異常事象検出手法 図 3 異常事象検出の提案手法 図5 旅行時間の推定方法 図 7 分析対象区間(首都高速道路 5 号池袋線)路線図 表 1 対象区間の事故統計データと検出結果 図 6 衝撃波速度の算定方法 4 適用事例 本章では,首都高速道路 5 号池袋線(下り)にお いて観測されたプローブデータと首都高速道路(株) の事故統計データおよび感知器データを使用して, 提案手法を適用し,精度検証を行った. 4.1 適用区間および事故データの概要 模式的に示した対象路線を図 7 に示す.首都高速 道路 5 号池袋線のうち,竹橋 JCT から熊野町 JCT の 約 8.2km の区間に着目し,その区間で 2014 年 8 月 12 日から 9 月 12 日の 1 ヶ月間に発生した 14 件の事 故事例について,提案手法を適用した.使用するプ ローブデータは,プローブ車両のユニーク ID,緯度, 経度,取得時刻,速度によって構成されており,こ れらの点列データから,走行軌跡を把握することが できる. 4.2 異常事象の検出結果 事故統計データに記録された事故発生点は,必ず しも渋滞の発生位置とは一致しない.そこで,提案 手法により,渋滞が発生した事故について,渋滞起 点を検出する.ただし,事故による渋滞を一意に特 定するため,事故発生地点 C(T,X)と P1 の変曲点 R(𝑟𝑡1 , 𝑟𝑥1 )の時空間上の距離|𝑟𝑡1 − 𝑇|, |𝑟𝑥1 − 𝑋|につ いての閾値を設定し,総距離が最も小さいプローブ 車両を P1 とした.対象とした事故の内容と適用結果 については表 1 に示す.なお,検出にあたり閾値は 表 2 のように設定した. 検出精度について,14 件の事故事例を渋滞の状況 別に考える.まず,渋滞が発生しなかった事例は, 7 事例(事例 No.03,04,05,06,10,11,13)であった.こ の一例として,事例 No.06 のタイムスペース図を図 8 に示す.このような事例は,交通量が少ない時間 帯に事故が発生したり,事故発生直後に,事故車両 を路肩に避難したりする場合が考えられる.本研究 では,渋滞発生地点の検出を行うため,これらの事 故は対象外である.適用の結果は,いずれも未検出 であり,残りの事例を検証の対象として検証を行う. 表2 異常事象検出における閾値の設定 渋滞が発生した事例は 7 事例(事例 No.01,02,07,08,09,12,14)であった.手法を適用した 結果,このうちの 4 事例(事例 No.02,08,12,14)につ いて渋滞を検出できた.この理由として,渋滞が 2 種類に大別できることが挙げられる.今回抽出でき た 4 件の事故は,いずれも自由流状態で事故が発生 し,その後に渋滞が発生した事例であった.一例と して,事例 No.12 のタイムスペース図を図 9 に示す. なお,図中の事故処理完了時刻は,事故統計データ から転記している.この事例では,事故発生以前に 通過したプローブ車両は自由流走行しているのに対 し,以後に通過したプローブ車両は,事故渋滞によ り速度が低下している.そのため,3.3 で提案した手 法により事故が検出できたと考えられる. 一方,残りの 3 事例については,検出することが できなかった.このうち,一例として事例 No.01 の タイムスペース図を図 10 に示す.これらの事例は事 故が渋滞中に発生した事例である.提案手法では, 自由流から渋滞流まで速度低下したプローブの確認 後に,そのプローブの直前に自由流で走行したプロ ーブ車両を用いて検出する.この事例では,想定し ていた速度低下や自由流走行が発生しなかったため, 検出することができなかった. 以上を整理すると,提案手法により,渋滞が発生 した 7 事例のうち,4 事例で異常事象の検出するこ とができた. 図8 事例 No.06 のタイムスペース図 図9 事例 No.12 のタイムスペース図 間である.便宜的にこの旅行時間を同時刻和と呼ぶ. 本研究では,5 分間隔で取得される路線の車両感知 器データを用いることにより,一定区間ごとの平均 速度を計算し,その平均速度で各区間距離を除する ことで,同時刻和を算定した. (2) 予測結果 旅行時間の予測結果を図 11 に示す.横軸は時刻, 縦軸は各時刻に出発した車両の旅行時間である.提 案手法による旅行時間の予測値は,同時刻和による 予測値と比較して,実測値に近いことがわかる.し かし,提案手法により予測した旅行時間にも,実測 値と乖離している時間帯がみられる.これは衝撃波 速度を計算する際に使用する変曲点の抽出精度に起 因すると考えられる.変曲点から推定される衝撃波 の傾きにより,将来の渋滞領域は変化する.そのた め,変曲点の抽出された位置により,信頼性が低い 旅行時間を予測する可能性が推察される. つぎに,提案手法全体の予測精度について検証す る.検証の対象範囲は,分析者が事故を検出した時 刻以降であり,3.3 より P2 の変曲点 R2 が観測された 時刻(黒破線)以降とした.なぜなら,この時刻以 前には,異常事象の発生を検出し,旅行時間の予測 精度を改善することができないからである.精度検 証として,下式に示す RMSE,%RMSE を用いて比 較を行った. 𝑁 1 2 RMSE = √ ∑(𝑡𝑖𝑒𝑠𝑡 − 𝑡𝑖𝑜𝑏𝑠 ) 𝑁 (2) 𝑖=1 %RMSE = (RMSE / 図 10 事例 No.01 のタイムスペース図 4.3 旅行時間の予測精度検証 異常事象を検出した事故事例について,図 7 に示 した路線のうち,1.5 - 7.5km 区間における旅行時間 を予測する.本節ではケーススタディとして,図 9 のタイムスペース図で示される事例 No.12 への適用 結果について述べる.なお,衝撃波の伝播速度計算 にあたり,過去T = 30[𝑚𝑖𝑛]の変曲点を使用した. (1) 提案手法と比較した旅行時間 旅行時間予測の精度評価に際し,本研究では 2 種 類の比較対象を設定した.1 つはプローブの実測値 である.これは現在時刻に観測区間の起点を出発し たプローブデータの実測の旅行時間を表す.もう 1 つは,渋滞の延伸や解消を考慮せず,現在の交通状 態が将来も同様に継続したと仮定した場合の旅行時 𝑒𝑠𝑡 ∑𝑁 𝑖=1 𝑡𝑖 ) ∗ 100 (3) 𝑁 ここで,i = 1,2, … , N は観測したプローブ車両数, 𝑡𝑖𝑒𝑠𝑡 は予測した旅行時間,𝑡𝑖𝑜𝑏𝑠 は実測の旅行時間であ る.その結果を表 3 に示す.RMSE は,予測値と実 測値の誤差の絶対値の平均による比較指標である. これより提案手法は同時刻和に比べて,実測値から の誤差が相対的に小さいことがわかる.つぎに, 図 11 旅行時間予測結果 表3 RMSE による予測精度検証 図 12 累積頻度指標による精度検証 図 12 に示す誤差の累積表示指標を用いて評価した. これは,旅行時間の予測値と実測値の差の絶対値を 算出し,昇順に並べ変えたものである.これより, 提案手法は同時刻和と比較して,常に累積頻度に対 する予測誤差が小さいことがわかる.また,同時刻 和による予測値は,20 分以上の誤差を含むのに対し, 提案手法の全予測値は,誤差が 20 分以内に収まって いることがわかる. ただし,この事例には 2 つ注意点が挙げられる. 1 点目は,プローブ車両が,渋滞延伸時の時間帯の みで観測されていることである.この場合,渋滞が 解消する時間帯にプローブが観測されていないため, 全時間帯での旅行時間予測の妥当性は評価できない. 渋滞解消時にプローブ車両が観測されない原因は, ドライバがカーナビゲーションシステムなどにより 事故情報を入手したことでルート変更を行い,対象 路線を避けたことが推察される.なお,この現象は 他の事例でもみられた. 2 点目は,実測値との比較 を行うサンプル数が少ないことである.図 10 のよう に,精度検証の対象範囲にプローブ車両が 5 台しか 観測されていない場合,十分な検証精度を保証する ことは難しい. おわりに 本研究は,プローブデータのみを用いて異常事象 を検出し,その後の旅行時間の予測手法を提案した. そして提案手法を首都高速道路における実際の事故 事例に適用し,モデルの検証を行った.その結果, 異常事象検出では約 6 割の事故を検出できた.また, 旅行時間予測では,現行手法と比較して精度の良い 旅行時間を予測できた. 一方,今後の課題は以下の 2 点が挙げられる. (1) 異常事象の検出率の向上 今回は,異常事象検出に事故統計データを使用し た.今後は,事前情報がなくとも検出が可能になる ような手法を構築する必要がある.また,渋滞中に 発生する事故は,自由流から渋滞流への大きな速度 変化が発生しなかった.そのため,渋滞中は速度以 外の状態量にも着目して,異常事象による渋滞の影 響を分析する必要がある. (2) 旅行時間予測の精度の向上 プローブの変曲点から衝撃波を推定し,旅行時間 を予測したところ,実測値と乖離する部分がみられ た.原因として,プローブデータには観測誤差が生 じることや,対象区間が 2 車線区間であるために, 事故による速度低下の状況がうまく観測できていな い可能性が挙げられる.そのため,このような誤差 を考慮した旅行時間予測手法を考える必要がある. 謝辞: 本研究で使用した車両感知器データ,事故統 計データは,首都高速道路株式会社から提供してい ただいたものである.ここに感謝の意を表す. 1) 2) 3) 4) 5 5) 6) 参考文献 D. Work, A. Bayen: An Ensemble Kalman Filtering Approach to Highway Traffic Estimation Using GPS Using Enabled Mobile Devices, Proceedings of the 47th IEEE Conference on Decision and Control, pp. 5062-5068, 2008 H. Chen, H. Rakha: Real-time travel time prediction using particle filtering with a non-explicit statetransition model, Transportation Research Part C 43, pp. 112-126, 2014 L. Domenichini, G. Salerno, F. Fanfani, M. Bacchi, A. Giaccherini, L. Costalli, C. Baroncelli: Travel time in case of accident prediction model, Procedia-Social and Behavioral Sciences 53, pp. 1080-1089, 2012 大畑 長, 桑原雅夫, 阿部重雄, 安齋潤也, 鎌田 恭典, 今井 武, プローブデータを活用した都市 間高速道路上の異常事象に起因する交通状態へ の影響把握, 土木計画学研究発表会, 2014 三谷卓摩, 益田卓朗, 永井慎一, 今井 武, 桑原 雅夫: プローブ軌跡データを用いた交通事故発 生時の旅行時間予測手法, 第 51 回土木計画学会 研究発表会, 2015 牛木隆匡, 日下部貴彦, 朝倉康夫: 衝撃波速度 を用いたプローブカーデータによる突発事象検 出手法, 第 49 回土木計画学会研究発表会, 2014
© Copyright 2026 Paperzz