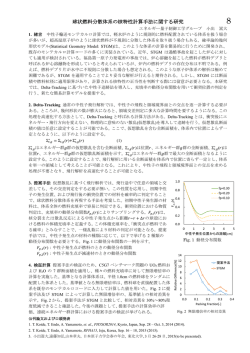
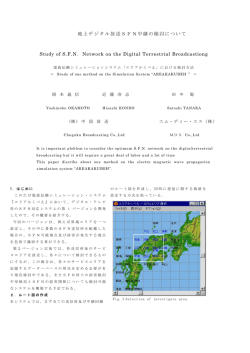
日本船舶海洋工学会講演会論文集 (この行は学会の方で記入します) 水上飛行機の波浪衝撃/ポーポイジング抑制機構検証模型試験 ポ 正 員 学生員 正 員 平 川 嘉 昭* 小 嵜 明日香** 平 山 次 清* 正 員 高 山 武 彦* 菊 地 広 光*** 桜 井 達 美**** Model experiment of a suppression-system for wave impact and porpoising phenomena on a sea plane by Yoshiaki Hirakawa, Member Asuka Kosaki, Student Member Tsugukiyo Hirayama , Member Takehiko Takayama, Member Hiromitsu Kikuchi Tatsumi Sakurai Key Words: Sea Plane, porpoising, 1. 緒 言 飛行艇や水上飛行機の向かい波離着水時には短時間で はあるが大きな繰り返し荷重を受ける。また平水中でもポ ーポイジング現象発生により機体自体が危険な状態に陥 ることが少なくない。従来から、これらを緩和する方法が 模索されてきたが決定的方法はまだ無い。今回、これらを 機構的に抑制・緩和することを目的とした、双フロートモ デルによる曳航試験を長水槽にて実施し、かなりの効果を 検証し得たので、問題点も含めて報告するものである。 のバネ・ダンパー機構を 4 箇所の支持部に組み込んだ形の ものであるが、フロートとの間の自由度をピッチのみとす るサージ固定枠も組みこんでいる。Fig.1 に以上の機構を 示す。 2. モデル概要 使用モデルは軽飛行機用の双フロートの 1/3 のモデルで ある。機体は重量・慣性モーメントを相似にした枠組み構 造とした(ダミー機体と呼ぶ)。従って空力面では相似と なっていないので速度によるダミー機体やフロートの浮 上量も実機と相似ではない。Table.1 に主要目を示す。 Fig.1 模型機構 Table.1 模型主要目 3. 計測システム 曳航システムは本学で開発した高速曳航システム1)を 使用し、運動の計測にはガイドアームの回転運動をポテン ショメーターで計測し、ヒーブ、ピッチ運動を計算で求め た他、ダミー機体とフロートの相対変位を超音波距離計で、 加速度を歪みゲージ式の加速度計で計測した。Fig.2 にガ イドアームの関係、センサー位置関係を示す。 4. 結果および考察 衝撃緩和機構としては自動車のサスペンションと類似 * 横浜国立大学大学院工学研究院 ** 横浜国立大学大学院工学府 ***ロイド船級協会 (研究当時、横浜国立大学工学部) ****(株)計算力学研究センター 原稿受付講演 4. 1 平水中実験 Fig.3 に、バネ・ダンパーなしの結果例、Fig.4 に、バネ・ ダンパーを装着した状態の結果例を示す。この周波数の範 囲ではバネ・ダンパーが効いておりポーポイジングの発生 も抑制されている。ただしこのモデルは以下に示すように 4自由度系でありアンチローリングシステムなど自由振 動モードの干渉による運動抑制システムで発生する目標 周波数以外での振動増大の問題を検討しておく必要があ る。 実験中、ダミー機体重心位置が center、固定脚、速度 5[m/s]以上の条件下で周期 T=0.84[s]のポーポイジング現 象が確認された。この周期は同条件のダミー機体の Pitching 固 有 周 期 に 最 も 近 い が 、 Pitching 固 有 周 期 は T=0.76[s](停止状態)であるため、一致しているとは言え ない。 一方でモデルの脚部をスプリングに変更し、他は同条件 Fig.2 計測システム で曳航すると、ポーポイジングは発生しなかった。これは ダミー機体の重心位置と、フロートの動的浮力中心位置の 変化速度によるバランスの崩れをスプリングが吸収した ためと考えられる。つまりスプリング脚はポーポイジング 現象を回避させる効果があったと言えよう。しかしそれと 同時に、今回の振動は4自由度の振動モデルで表現されて いるので、連成による固有周期が変化した結果とも考えら れる。よってポーポイジングが他の周波数で発生しないこ とを十分に調査する必要もある。 4. 2 過渡水波中実験 過渡水波中の実験に関しては、ダミー機体重心位置とフ ロート前部の上下加速度データを元に、応答関数のグラフ を求め、固定脚とスプリング脚の物を比較した(Fig.5 に示 す)。今回、過渡水波中の実験は曳航システムの関係上、 0[m/s]と 4[m/s]に限られており、残念ながら高周波数帯の 応答は求められていない。過渡水波の応答関数で顕著に応 答の出ているように見える部分は、過渡水波の入力が小さ かった部分であり、応答関数自体が入力値を出力値で割っ て求められる事から、いわば分母が小さくなったために応 答関数の値が大きくなった為であると考えられる。 応答関数による固定脚とスプリング脚の振動比較では、 モデル重心部の上下加速度において出会い周波数が 10~ 20[rad/s]付近で、スプリング脚のモデルの方が固定脚の時 よりも、揺れが大きく出ているのが見て取れる。つまりこ の周期ではダミー機体がスプリングにより励振動されて いると考えられる。 4. 3 規則波中実験 規則波中の実験においては、フロート前部の上下加速 度データを元に、各規則波周期に対する上下加速度のグ ラフを作成し、さらに各値を波高で割ってパラメーター 化し、比較した。図6に、機体上下加速度、図7に、フ ロート前部上下加速度の比較をそれぞれ示す。 脚の条件が、それぞれ固定脚とスプリング脚のデータ を比較すると、特に周期 T=0.7[s]~0.9[s]の波浪中で、 スプリング脚は有効であると言える。モデル重心部の上 下加速度と、Pitching の時系列では共に振動は大幅に低 減され、機体の Pitching がほとんど発生していないケー スも見られた。一方で、フロート前部の上下加速度値が 大きくなっている。 しかし波の周期が T=0.99[s]、1.41[s]と長くなるにつ れて固定脚の場合で、上下加速度と Pitching の振動は規 則波中 T=0.7~0.9[s]のケースよりさらに激しく、スプ リング脚を使用した場合でも振動の抑制効果は存在した ものの、有効であったとは言い切れない。これは T=0.99[s]、1.41[s]がλ/Lが1と2であり、一般に最も 揺れやすい周期である事が一因と思われる。 さらに周期が長くなるにつれて、固定脚の Pitching に見られた周期 T=0.84[s]の振動は、スプリングで抑制 されているものの、新たに周期 T=1.4[s]の振動の発生が 見られた。この周期を周期表と照らし合わせると、同条 件モデルが水上で機体に入力させ励振させた固有周期に 近いが、ポーポイジングの際も周期 T=1.26[s]と、同様 に、完全には一致していない。 総合すると、今回のスプリング脚はλ/Lが1以下の状 態では、かなり有効な振動抑制効果を発揮し、ポーポイ ジング現象の回避にも有効であったと言える。 Fig.3 ばね・ダンパーなし実験結果 Fig.4 ばね・ダンパーあり実験結果 5. 簡単化した 4 自由度モデルによる検証 重心位置:center Velocity:4.0[m/s] 過渡水波中 Block size 4096 一定速度で航走中の[ダミー機体+フロート]の自由 度は、フロートのピッチ、ヒーブおよびフロートとサー ジ固定枠間の相対ピッチおよびサージ固定枠とダミー機 体間の相対ピッチの4自由度(これはダミー機体のピッ チ・ヒーブに換算可能)となっている。 バネ・ダンピング系を挿入した場合平水中でのポーポ イジング発生条件がどのように変化するかどうかについ て、現在、飛行艇運動シミュレーションプログラムを援 用して求めようと検討中である。ただし、フロートの形 状・流体力として飛行艇体のもの 2)を使用したので今回の 実験そのものとの比較は出来ないが、傾向を論じること は可能であると考えられる。 6. 結言 Fig.5 過渡水波中 応答関数比較結果 本論文では水上飛行機の滑走状態における衝撃緩和に 関する模型試験を実施した結果について報告した。今回 の実験で、スプリング脚の振動抑制は有効であったと認 められ、ポーポイジング対策の一案としても有効性が確 認できた。ただし自由度を増したため当該現象周波数が 移動したためとも考えられるのでシミュレーションなど で確認する予定である。 また実験モデルは全機モデルではなく胴体・翼部分を 重量・慣性モーメントの点で同等の骨組み構造物とした。 従って揚力効果は入っておらずまたプロペラ推力効果も 入っていないため実機推定にあたっては更なる検討を要 す。 さらに今回はサスペンションの都合上、ダンパーオイ ルを抜いた状態であったため、ダンパーを装備した状態 での実験を検討する必要がある。 さらには脚の強度の問題と、脚の体積が増える事で空 気抵抗値が上昇することが予想されるので、それを踏ま えさらなる検討も必要であると考える。 なお今回の試験は桜井達美氏らの呼びかけによる水上 飛行機研究会との話合いによる結果であり試験用フロー トおよび脚モデルの提供も受けたことをお断りする。 参 考 文 献 1) Fig.6 機体上下加速度比較 Fig.7 フロート前部上下加速度比較 平山次清、宮川清、高山武彦、森中昭宏:飛行艇の 波浪中離着水性能水槽試験(その1)、日本造船学 会論文集、Vol.185,1999、pp91-99) 2) 平山次清、宮川清、高山武彦、高速ガイドシステム による飛行艇の利着水自航実験、関西造船協会誌、 第 234 号、2000、pp155-165 3) 平山次清、宮路幸二、高山武彦、平川嘉昭、加部東 大悟:飛行艇の水面近傍空力特性―実験と数値シミ ュレーション-、日本造船学会講演会論文集、第4 号、pp7-8, 2004 4) 平山次清、宮路幸二、高山武彦、平川嘉昭:飛行艇 の水面近傍空力特性、第 42 回飛行機シンポジウム、 Oct.2004 5) 平山次清、平川嘉昭、高山武彦、小嵜明日香、菊地 広光:低高度飛行体の水面影響に関する研究、日本 船舶海洋工学会講演会論文集、第2E 号、pp129-130, 2006
© Copyright 2026 Paperzz