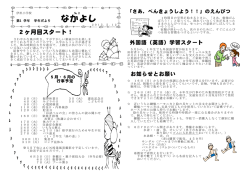
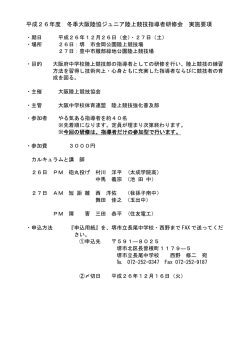
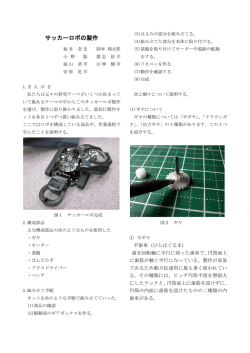
ソーラーカーの駆動システムの高効率化 番号 200316 佐久間正人 指導教官 松岡守 1. はじめに ソーラーカーは工業高校や高専などの自動車の機 構,エネルギー,環境を学ぶ上で格好の教材であり, 多くの学校が各地で開催されているレースに参加し ている。本学でも平成13年度よりソーラーカーを 実際に製作し,レースへの参加を通じて,回路や機 構,モーターの駆動特性,制御システム等の知識を 深め,教材としてのソーラーカーの意義の理解に努 めてきているところである。 本年度は、3 人のスタッフと周りの方々の協力の もとソーラーカーを製作し、ソーラーカーの最適化、 駆動システムの高効率化、データ処理システムの開 発を目的にレースの参加、研究に取り組んだ。 本報告では製作したソーラーカーのモーターの駆 動特性と実走行時の状況を比較し,より効率的な走 行条件について検討した結果を示す。 2.2 ソーラーカーの概要 ソーラーカーの構成は図1になる。太陽電池で発電さ れた電気エネルギーは、蓄電池に蓄えられるか、そのま まモーターに使われる。モーターは DC モーターを使用 する。AC モーターでは DC 電流を AC 電流に交換す るシンクロ装置が必要になるため不向きとなるから である。 太陽電池 モータ ド ラ イ バ 車輪 モータ 蓄電池 アク セル 図1 ソーラーカーの基本構成 2. ソーラーカーの概要 2.1 ソーラーカーレースの概要 ソーラーカーレースは、世界各地で開催されている。 そ の 中 で 世 界 最 大 の レ ー ス は 「 World Solar Challenge」三年に一度オーストラリアで行われる。 距離は約3010kmという長距離コースである。 日本で開催されているのは「 ソーラー チャレンジ イ ン 北 海 道 」 や 、 本 研 究 室 が 参 加 し た 「 FIA ALTERNATIVE ENERGIES CUP DREAM CUP ソーラーカーレース鈴鹿」などがある。 参加したレースの概要を表1で示す。 開催日程 会場 表1 大会要項 2003年6月16日(月)試走会 7月25日(金)、26日(土)、27日(日) ・25日(金)ソーラーカー公式車検、 ・26日(土)ソーラーカー公式予選、 ・27日(日)ソーラーカー4時間耐久 レース決勝 鈴鹿サーキット国際レーシングコ ース(5.81km) クラスは DREAM、CHALLENGE、ENJOY ク ラスに分かれ、本研究室は ENJOY クラス(480W 以下、鉛蓄電池を使用)に参加した。 2.3 製作したソーラーカーの概要 表2 製作したソーラーカーの概要 モーター MPVE110-0245F (高岳製作所製) … 定 格 出 力 1.1 k W 、 定 格 ト ル ク 53.5kgf・cm、定格電流 28A、定格回転 速度 2000rpm、電圧 48V 太陽電池 FT132 (シリコン単結晶) (昭和シェル石油株式会社) …最大発電量 44W×10 枚 バッテリー 鉛蓄電池(日本電池株式会社) …(12V 50Ah)×4直列 *車重量:200kg 2.4 ソーラーカーに用いたモーターの特性 用いたモーターはサーボドライバにより速度制御 またはトルク制御に設定できる。速度制御では回生 機能が働く。回生機能というのはブレーキ特性のこ とであり、電流をカットして回転を続けようとした 場合、逆起電力が働き、モーターがブレーキとして の役割を備えるようになる。モーターが発電機とな ることで、逆方向のトルクが発生するためであるが、 卒 10− 1 逆トルクの発生によるブレーキ作用をさらに高める には、回路の設定が必要になる。つまり、モーター に発生した逆起電力の電流を逆向きにモーターに送 り込む回路を組むことで、強烈なブレーキが得るこ とができる。 そして、モーターのメーカーより入手したデータを 回転数とトルクに対するモーターの効率を図2にま とめた。 トルク(kgf・cm) 効率マップ 40% 140 120 4.2 ソーラーカーレース予選走行 モーターの制御はトルク一定制御とした。複周回 走行したうち、2 周分データを計測した。一周目は 通常の車において燃費が良いとされるような走行, つまり急加速をしない走り方,2周目は逆に急加速 を行う走り方とした。 トルクのモニタ出力 50% 60% 100 80 60 40 20 0 0 63.7762.22 52.54 36.90 65% 66.19 66.15 55.46 40.03 68.37 68.39 58.18 43.03 70% 70.25 70.12 61.38 46.94 71.56 71.9 63.57 50.01 72.57 73.55 66.25 53.03 56.14 72.88 74.84 67.87 58.73 71.78 74.28 68.8 58.27 65.92 68.57 65.3 25.98 20.68 12.05 14.46 500 1000 1500 2000 2500 10 8 電圧(V) 回転数(rpm) 図2 た負荷試験による実験を行った。太陽電池をはずし た状態のソーラーカーを台の上に置きタイヤを浮か せ計測した。 この実験の結果、トルク域が同じ状態でのモータ ーの回転数では高回転域のほうが高効率であり、ト ルク域が同じ状態での回転数と Ahの減量数が比例 関係にあることが分かった。また、高回転域のほう がバッテリーの減量数が安定して行われていること が分かった。 モーターの効率特性 6 4 2 0 -2 0 3.実験方法 500 1 周目 実験で得るデータは、 「モーターのトルク」 、「モー ターの回転数」、 「バッテリーの充放電電流」である。 モーターのトルクは、直接記憶するのが困難なた め、サーボドライバにあるトルク制御信号のモニタ 出力から取る。 モーターの回転数は、モーターの回転軸に取り付 けた小型の発電機(モーター)の出力から取る。こ の出力はモーターのサーボドライバのモニタ出力を 回転数に切り替えた場合の出力に良く一致すること をあらかじめ確認している。 バッテリーの充放電電流は、シャントで計る。充 放電電流にはソーラーカーとしての通常走行時には 太陽電池による充電電流が含まれるが,太陽電池を 切り離せば駆動系で消費される総電力をこれから評 価することが可能である。 これらのアナログ出力を Voltage Recorder(T&D 製 ) 及 び 、 テ ス タ ー DIGITAL MULTIMETER PC520M(SANWA 製)に記憶させ走行終了後コンピ ュータに取り込んで解析する。 4.実験結果 4.1 個性特性実験 無負荷(空回転)試験、ブレーキを部分的にかけ 1000 経過時間(秒) 1500 2 周目 小型発電機の 電圧 図3 予選走行時のトルクのモニタ 出力、小型発電機の電圧の時間変化 バッテリーの Ah の減量数は1周目:2.79 Ah、2 周目:4.03 Ah であった。 5.まとめ ソーラーカーの走行時のモーターのトルクと回 転数のデータを収集した。これをモーター単体の効 率マップの基礎データに突き合わせることにより、 より効率的な走行を求めることができるようになっ た。またモーターの基礎的な実験を行ったことによ り、モーターの特性が分かった。今後、このデータ を元にソーラーカーの駆動系の改良、効率的な走行 方法の確立が行えると予想される。 参考文献 1) 橋口盛典 「図解 ソーラーカー」 1993.5.30 2)角田真一、永田淳、西村仁良、森下雄一郎「ソーラー カーの開発」三重大学教育学部技術科卒業論文 平成14年3月 卒 10− 2
© Copyright 2026 Paperzz