静岡理工科大学紀要
9
無線技術を応用したピストン温度測定に関する研究
P
i
s
t
o
nT
e
m
p
e
r
a
t
u
r
eMeasurementSystemu
s
e
dRF・MEMS
土屋高志'
TakashiTSUCHIYA
I
ti
se
x
t
r
e
m
e
!
yi
m
p
o
r
t
a
n
tt
os
a
v
ee
n
e
r
g
yf
o
rp
r
e
v
e
n
t
i
o
no
fg
!
o
b
a
!w
a
r
m
i
n
g
.Newg
e
n
e
r
a
t
i
o
na
u
t
o
m
o
t
i
v
ee
n
g
i
n
e
i
smadeupbyh
i
g
hc
o
m
p
r
e
s
s
i
o
nr
a
t
i
oa
n
d!ow合i
c
t
i
o
nbys
m
a
l
le
n
g
i
n
ef
o
rb
e
t
t
e
rf
u
e
!c
o
n
s
u
m
p
t
i
o
n
.
Howeverw
i
t
hh
i
g
h
e
rc
o
m
p
r
e
s
s
i
o
ni
n
c
r
e
a
s
et
h
ep
i
s
t
o
n
'
st
e
m
p
e
r
a
t
u
r
ee
x
c
e
e
d
sam
e
!
t
i
n
gp
o
i
n
to
ft
h
ea!uminum
andap
i
s
t
o
ni
sd
a
m
a
g
e
d
.Th
em
e
a
s
u
r
e
m
e
n
to
fgoodp
i
s
t
o
nt
e
m
p
e
r
a
t
u
r
eo
ft
h
ep
r
e
c
i
s
i
o
ni
sv
e
r
yi
m
p
o
r
t
a
n
tf
o
r
h
i
g
h
e
rc
o
m
p
r
e
s
s
i
o
np
i
s
t
o
nandgoodf
u
e
!c
o
n
s
u
m
p
t
i
o
n
.
I
nt
h
i
sp
a
p
e
rwemadet
h
em
e
a
s
u
r
e
m
e
n
to
fgoodp
i
s
t
o
nt
e
m
p
e
r
a
tぽ eo
f
t
h
ep
r
e
c
i
s
i
o
nbyRF-IDs
y
s
t
e
m
s
.
)ンクおよびリ
ストンに取り付けられた温度センサから 1
1.研究の目的
エンジンを小型・高出力にするためには,エンジンの高
ード線は,線の切断,絶縁被服のはくり,リード線の引張・
速化が必要であり,高速化するためにピストンを軽量化し,
圧縮・曲げおよびねじれなどの変形が起きるという問題が
慣性力を抑えるということが重要である.現在,ピストン
あり,最も工夫が必要である.装置としてピストンが往復
の軽量化をおこなうために,ピストンの材質は軽く,熱伝
運動をしているので何らかの影響があり,高速回転での運
導率の大きいアルミニウム合金が使用されている.アルミ
転は不可能である.
ニウムの特性として,加工性・表面処理性・耐食性・溶接
2
.2 燃焼貫通法
性・電気伝導性・熱伝導性などが優れているが,欠点とし
前項のリンク式ではリンクをクランク室に取り付けるた
ては融点が 6
6
0
'Cと低いという問題がある.エンジンの省
め,クランクケースが狭小なもの,特に二サイクルエンジ
燃費化を進めるためには,摺動抵抗(フリクション)の少
ンには応用できないが,燃焼室貫通法は,クランク室に関
ない小型エンジンを用い高圧縮比化をおこない高い比出
係なく使用することができる.装置としては,ピストン頂
力を得るととが最も良い方法であるが,高圧縮比化を進め
面にロッドを立てて,燃焼室を貫通させることにより,熱
るに伴いピストンの熱負荷は上昇し,ピストン温度がアル
電対を導出し,外部に 1
)ンクを取り付ける方法である.ロ
ミの融点を超えてピストンが破損するという問題が発生
ッドは,燃焼室内を往復運動するので,耐熱性と素線の接
する.このようなトラブルを回避して,最適な状態での運
着剤j
の耐熱性が使用限界あるという問題がある.
転ができるように,ピストンに対する熱負荷を設定するた
また,外部でリンクを使用するため,リンク式と同様に
めにも精度の良いピストン温度の測定は非常に重要であ
高速回転での運転が不可能であり,またピストンが拘束さ
ると言える.
れているので,ピストン揺動時の測定が不可能である.
本研究では,ピストンの温度を精度良く測定するため,
2
.
3 電磁誘導法
R
F技術(ディジタル無線技術)を
二つのコイルを用いて磁界の変化を利用して伝送する
応用し,軽量かっ信頼度の高い温度測定システムを構築す
ことによって無線伝送する方法であり,トヨタ C
A
R
T
等で使
るととを円的とする.
用された実績がある.この実績のある電磁誘導法の装置と
近年発展のめざましい
しては,温度センサは小型のサーミスタを用いて,大きさ
2
. 過去に実施された測定方法
はセンサ部で φ
0
.
8である.ピストンおよびライナ部に送
2
.!リンク方式
受信コイルを取り付け,ライナ側送信コイルに高周波を印
リンク方式は,英国のA
.E
.D
やドイツのカール・シュミッ
加し,ピストン温度によりピストン側コイルのインピーダ
ト社などで開発されている.装置としては,温度センサを
ンスが変化するととによって,受信側コイルの出力が変化
取り付けたピストンからリード線によって,エンジンの内
する.これによって温度を取り出すものである.
部から外部に取り出せるようにリンクをピストンに取り
非接触で信号を取り出す方法であるため,高回転での測
付けて,温度を測定する方法である.そのリンクを外部に
定が可能である.文,温度と電磁誘導量の関係が解ってい
取り出すために,クランク室に穴を開ける必要がある.ピ
れば,リアルタイムでの温度測定が可能であるが,ビスト
2010年 3月 24日受理
場理工学部機械工学科
1
0
Vo
1
.
18,2010
ン側コイルとライナ側コイルが重なっている時のみ測定
囲は, 5
5't>
.
.
,
+1
2
5'Cである.
が可能となり連続したデータが測定できないという問題
や,コイル部の温度によるドリフトが大きいという問題が
M
A
X
6
6
9
1 は,それぞれのサーミスタと外部固定抵抗器
(
R
, M
A
X
6
6
9
1の内部基準電圧 (
V
R
E
F)で運転されて分圧
E
X
r)は
残されている.
E
X
Tを通した電圧を P
W
Mディジタル出
器を形成して V
R
E
Fと R
2
.
4 硬度法
T
T
Lレベル)に変換させる.
力(
混み入った箇所や密閉空間,小部品等での温度測定と
/
D変換器は,それぞれ4
つのサーミスタと固定抵抗
とのA
しては,温度により硬度の変化する金属をビストンに埋込
器によって内部電圧から分圧器を形成され,パルスに変え
み,運転後に金属の素材から硬度の度合いを測定すること
られるため,パルス幅と R
R
r
H)の
E
X
rおよびサーミスタ抵抗 (
で,実際の温度を測定する.一定時間運転することで最高
関係を次式で表すことができる.
温度のみ測定が可能である.
TUlreU
V".V中
ι =一 品 ム -0.0002=
ふ立山
T
ww VREF
2
. アクティプ型温度測定システムの仕様
Rr
:V T
--0.0002
ιA_1
REXT+RTH
本研究では,市販されている軽量かつ小型の汎用無線モ
ジュールを使用して小型で軽量な測定器を製作した.
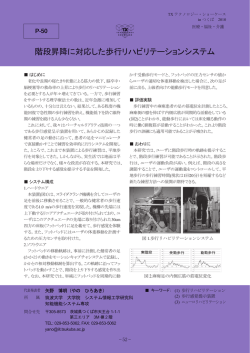
構成した温度測定システムは F
i
g
.2
.1に示すようにセ
ンサ.A
/
D変換器・送信機・受信機に大別される.個々の
仕様については下記に示す.
F
i
g
.2
.3 A/D変換のデータ出力信号
¥
¥
t
E
D
D
1
4
2
u
t
;
M
2
.3 温度センサ仕様
温度センサには立山科学工業(株)製ラジアル型サーミ
2
.OX4.O
m
mの円筒形,質
スタを使用した.サイズは約 φ
量0
.
4
g,2
0'Cで約 16MQ, 2
0
0'Cで約 23.4kQの逆特性を
N
T
Cサーミスタ)である. (
F
i
g
.2
.
4
)
もっサーミスタ (
抑制問
Fi
g
.2
.1システム構成図
2
.1
. 送信機仕様
Fi
g
.2
.4 サーミスタ
送信機には一般的にノイズに強いとされるパルス幅変
を用いたディジタル通信方式のアイテック(株)製
i
T
X
3
1
5
A型を使用した. (
F
i
g
.2
.2
)
送信機仕様としては, F
S
K変調方式の微弱電波送信モジ
ュールを使用し送信周波数 3
1
5
聞Z
,出力一 2
5
d
B
m以上,消
2
.
4 送信機ユニット
送信機・A/D変換器を組み合わせた物を F
i
g
2
.
5に示す.
4X横 1
4
m
m,厚さ 5
m
m,質量は約1.3gとなっ
サイズは縦 1
ており,非常に小型・軽量となっている
mA,定格電圧 3
Vである.
費電力 2
F
i
g
.2
.2 送信機ユニット外観
2
.2 A
/
D変換器仕様
A
/
D変換器には 4チャンネルの入力を持ち入力電圧を
F
i
g25 送信機ユニット外観
,
,
2
.5 受信機仕様
受信機は,送信機と対になるアイテック(株)製の
T
T
Lレベルのディジタル出力に変換することができるマキ
i
R
X
3
1
5
A型を使用した.受信機仕様としては, F
S
K復調,
シム社製M
A
X
6
6
9
1型A
/
D変換ユニットを用い,サーミスタか
シングルスーパーヘテロダイン方式の受信機を用いた.電
らの出力電圧と基準電圧の比較により温度を推定し,各チ
源電圧は 3
V,サイズは約 2
4X1
8lD1D,標準復調速度 9
6
0
0
b
p
s,
ャンネル順に P
W
M変換をおこなう.チップの動作温度の範
単信方式の受信機を用いた.
1
1
静岡理工科大学紀要
2
.6 電源仕様
R
4
2
5 ヒン形リチウム電池を使用し
電池は松下電器製 B
V,容量 2
5m
Ah
,サイズは φ
4
.2x2
5
.
9
0
0,質量
た.電圧 3
は約 O
.6
gと非常に小型かつ軽量である. (
Fj
g
.2
.6
)
l
.三三.
2
.
5
~
・
。
20
国2
主目
;
:1
.
0
3
E05
.
.
:
f
{
〉
)
』
~ 00
5(
)
(
s
4α2
-
Z
E
m
30
<
ト
Fi
g
.2
.6 リチウム電池
コ
Q.
“
コ
201 ~
101
ω
z
u
oαZ
3
.ピストン温度測定システムの基本特性試験
3
.1 データ出力確認試験
4
.
1
8
419
4
.
2
0
421
422
423
425
424
T
im e(
5
)
本研究のシステムでは送信機から受信機の間でパルス
Fi
耳 3
.2 電源電圧試験結果
i
g
.
3
.
1に記す.温度センサは 4箇所分接続しであり,
形を F
3
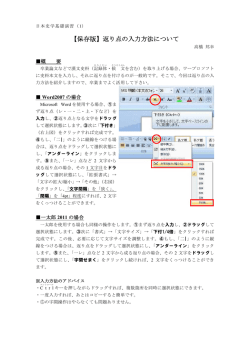
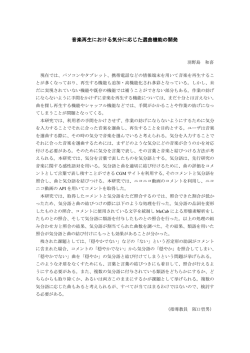
.3 温度直線性試験
サーミスタと T熱電対を同位置に取り付けて,半田ごて
N
o
lから N
o
4までが順次送信されている. N
o
lセンサの判
の温度(温度範囲は 25~370 'C )を測定した.結果は、
別の為に N
o
lの立ち上がりの前に 5
μ 秒のプルダウン信号
Fi
g
.3
.3 に示すように 100~370'Cまでは,ほぼ直線に保ち
が入っている.また,溢度の判定はブルアッフご時間とフル
温度誤差は::t4
'C以下で, 1
0
0'C以下では P
I
I
M応答性の問題
ダウン時間との比率となっておりプルダウン時間は一定
により測定不能であったが,実際の熱負荷が問題となるヒ
幅変調によりデータを送信しており,受信機からの出力波
5
m秒としている.本研究では 2
3
8'Cの場合に(ブルア
で
ップ時間)/(プルダウン時間)=
0
.
5 としている.この比率
5
0'C以上であるの
ストンの温度は,過去の温度測定より 1
で本システムでの測定には問題ないと考えられる.
はピストン温度により変化するサーミスタ抵抗値と基準
侭抗との比率と等価となっており,測定を希望する温度抵
抗値を中心として基準抵抗値を設定するととにより温度
感度の良い測定が可能となっている.
〉
~ 1∞
2
豊田
i
f
E
益。由
∞∞叩凹
3210
主
=
E
‘
E
A
L
ト
40
50
60
70
80
90
凹
30
{﹀吉岡崎岩宣言 9 2 0包EEE
〉
_
g050
20
3
田
t
1
: 150
き 1曲
1
0
~
5m
1
デわ(三六二回二ー二ー
一
ω150
~
.
8250
1
出 2
c
h 3
出 4
c
h
200
(
400
.
p350
0
~
0
./'
./
/""
../
50
1
四3
150
200
〆
250
/キ=附87
300
350
。
。
‘
S
t
a
n
d
l
r
dTem
岡 崎u
r
e
(
O
C
)
F
i巳 3
.3 温度直線性試験結果
3
.4 周囲温度影響試験(周囲によるドリフト試験)
本システムの送信機ユニットに温度計を当て,ヒータに
より周囲温度を温めデータ出力の変化を確認した.また,
1
ime(
m
s
)
0'
C
・7
0'
C
・8
0'Cで行い,各 7回行った.
各周囲の温度を 5
Fi
g3
.1 データ出力確認試験結果
結果,送信機ユニットの周囲温度が 8
0tでもデータの変
3
.2 電源電圧試験
化はなく,各周囲の温度による平均温度誤差は::tl
'C以下
電源電圧を徐々に下げることにより電源電圧低下によ
であった周囲を温めてもシステムの動作を確認するとと
るシステムダウンを確認した結果,電圧が 2
.
0
1
V以下に
ができたので,ピストンに直接,送信機の取付けが可能で
I
I
M変換誤差が発生し, .
19
3
V以下で送信電波が停
なると P
あると考えられる.
止1.9
1
V以下で A
/
D変換チッフからの P
W
M変換が停止し
3
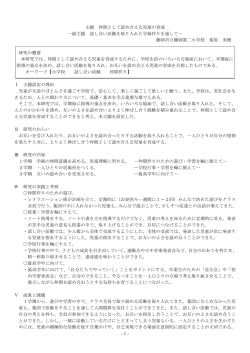
.5 連続測定時間確認試験
.
0
1
V以上が必要
た.結果,送信機側電圧としては,最低 2
送信機ユニットには,リチウム電池を取り付けることで
.
0
1
V以上が必
であり,システム動作の電源電圧としては 2
ヒストンの温度を測定するため,リチウム電池を l本使用
要であることがわかった.
し,データを測定できる時間の測定を行った.送信機ユニ
Fj
g
.3
.
4
)で入る
ットから温度信号が受信機に一定の間隔 (
ようになっており,結果,信号の乱れが発生する時間は約
9時間であった.この時点で電池の電圧は 3
.
3
Vから 2
.4
V
まで低下していた.
1
2
Vo1
.
18,2010
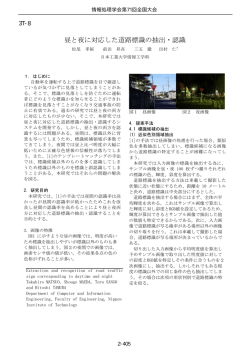
温度の測定位置は F
i
g
.4
.2のように,ヒストンの中央
,
ー
、 30
〉
(燃焼室ホットプラグ部中央)・スラスト側 2点(排気弁側
@
国
~
2
20
ω
;
i
l
. 1.0
(
〉
c
}
・
0
老
00
5
と吸気弁側)と反スラスト側 l点(上面より見て右側)の計
4点である.
∞
言
3
言
←
∞
2
コ
O
L
∞
1
2
o
e
3150000
31500.05
31500.10
31500.15
3150025
3150020
0
.
0
0
31500.30
a
:
:
T
imo (
&
】
F
i耳 3
.
4 データ出力可能時間試験結果
4
.電池式温度測定システム実機温度測定結果
送信機ユニットをピストンに取り付け,本システムが測
定可能であるか確認するために小型エンジンを使用して
ピストン温度の測定を試みた.
供試エンジンには,富士重工製汎用 4サイクル単気筒小
Fi
g
.4
.
2 サーミスタ取り付け位置
型デ、イーゼルエンジンを使用し,ピストン径 φ
75mm,行程
6
0
m
m,定格出力(出力軸) 3
_l
k
W
/
1
8
0
0
r
p
mである
a
b
l
e 4
.1に示す.
その主要諸元を以下の T
T
a
b
l
e 4
.
1
名称
DY23-2BS
冷却方式
空冷
シリンダ数
1
ボア×ストローク
70x60m m
排気量
230c
c
圧縮比
2
1
最大出力(出力軸)
3
.
1
kW/1800rpm
最大トルク{出力勅)
21
.6N.m/1
l50rpm
測定項円は,ビストンの 4ヶ所・吸気温度・潤滑油温度・
排気温度・エンジン回転数としている
i
g
.4
.
3,F
i
g
.4
.4に示すようにクラ
受信機ユニットは F
ンク軸横側(反スラスト側)のクランクケース内部に構造
5.0
用接着剤により接着した.また,クランクケースには φ
の貫通穴をあけることにより電源用配線および信号用配
線をスタータモータ裏側より外部に導出している
送信機システムの取り付け位置は F
i
g
.
4
.
1 に示すよう
にピンボス部横付近に耐熱接着剤により固定している.
また,送信機用のヒン形 1
)チウム電池は,送信機側面に
Fi
g
o4
.3 受信機ユニット取り付け位置
取り付けたホルダにより送信機およびピストンに固定し,
耐熱はんだにより配線を固定している.
Fi
g
.4
.1 送信機ユニット取り付け位置
F
i
g
.4
.4 受信機ユニット取り付け位置詳細
i
g
.4
.
5にボす
実機試験の外観を F
受信機には定電圧電源から電気が供給され,受信機からの
1
3
静岡理工科大学紀要
抑制畑
c
(FE)ZS。羽.“。
信号はデータローガによりサンプリング・保存している.
ー
醐
(
〉
)
日
o
E
ε
│
ー
-00也 5
i
a
冊 1
Z
砂
川
3帥 雪
5
。
~
2曲
.
.
h
1田
四 回6
2
1
2
1,5
22
2
2
.
5
23
2
3
.
6
聖
・
o
0
.
0
0
a
:
24
T
i
me(s)
Fi
g
.4
.
7 実機試験結果 (
3
5
0
0
r
p
m定格運転)
Fi
再 4
.5 実機試験装置外観
5
.実機試験結果および考察
ρ3
∞
﹄)
ータとび等の問題は発生せず,全データの取得が可能であ
柏田
f 250
言
2
.
0
0
語安田
った
E
@
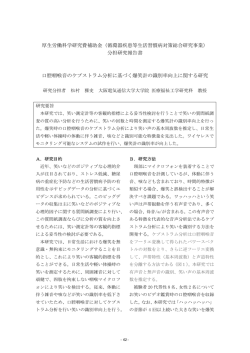
F
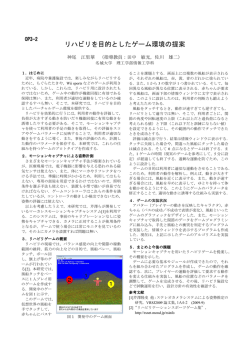
i
g
.4
.
6にエンジン始動から 3
5
0
0
r
p
mまでの測定結果
を Fi
g
.4
.
7に 3
5
0
0
r
p
m一定回転で定格負荷を投入した場
i
g
.4
.
6および F
i
g
.4
.
7より,エンジ
合のデータを示す. F
ンの始動時から定格出力が一定になるまでピストンから
ト
ー
2剛
1>0
1
5
曲
H
Z
E1∞
E
a 50
1
田
5
i
。
a
:
@
:
:
o
0
0
1
4
.
0
150
1
8
.
0
t
1
。
180
1
9
.
0
2
0
.
0
2
1
.
0
220 230 240
T
ime(s)
Fi
g
.4
.8 エンジン始動時のヒストシ温度変化
i
g
.4
.8
この時のデータ信号を温度に換算した結果が F
ピストン温度は,エンジンが始動してから急激に
上昇し定格回転でほぼ一定の温度になるととがわかった.
この時のヒストンの最高温度は,排気弁側の
o
・
.00
データ信号が連続して測定できていることがわかる.
である
一E
F
させて温度を測定した.温度測定データは,温度変換,デ
350
問問
エンジンを始動し,無負荷最高回転数まで回転数を上昇
3
1
5
tであり.
5
.まとめ
本測定システムを使用することにより,軽量かつ安価な
エンジン実動時のどストン温度測定システムを使用して,
定格負荷時は燃焼室中央の温度と排気弁側の温度がほぼ
過去,測定するととが困難であったピストン温度データを
同一になることがわかった.また,吸気弁側と反スラスト
ヒストンの挙動に影響を与えるととなく連続して測定す
側の温度は一定負荷の場合ほぼ同じ温度となり,排気弁側
の温度と約
2
0
tの差がある事がわかった.
ることに成功した
また,問題点としてはデータ測定時間
が 8時間以内に限定されており,今後は無電源システムの
この場合新気の流れが吸気弁ーから反スラスト側方向に
検討をおこなう必要性がある.
流れ燃焼室内に流入し,燃料が噴射され燃焼し燃焼室から
排気弁を介して排気されることを示しており,
ー般的なタ
参考文献
環境再生保全機構:大気環境の情報館,
ーンフロータイフの直噴ティーゼルエンジンの燃焼形態
(1)独立行政法人
と 致している事を推定するととができる.
w
e
bページ,
(
h
t
t
p
:
/
/
w
w
w
.
e
r
c
a
.
g
o
.
j
p
/
t
a
i
k
i
/
s
i
r
y
o
u
/
i
n
d
e
x
.
h
t
m
l
#
5
)
A
棚醐
21
~
0
。
@aωc E E
。
可 ♂
。
(
2
)古浜庄ーほか:エンジンの温度測定.日本機械学会
J
S
M
E S
0
0
7(
19
8
6
), p
p
l
3, p
p
.
7
0
7
8
~
│
ニ
ロt
i
p
t
b
n
M
l
二二戸
∞
4
2
.
0
0
186
1
1
116
18
186
一
_
.
ー
1
9
195
T
ime(s)
F
i麿 .
46 '実機試験結果(始動 ~3500rpm)
∞
1
。
。
20
3
s
・
Z
聖
‘
0
E
0
(
3
)福島
淳二超高速 (
C
A
R
T
)エンジンにおける実動時の
ヒストン温度計測,
自動車技術
V
o.
15
8,
N
o
.7(
2
0
0
4
). p
p
.6
9
7
3
(
4
)アイテック株式会社,汎用無線モジュール, w
e
bページ,
(
h
t
t
p
:
/
/
w
w
w
.
i
t
e
c
c
o
r
p
.
c
o
.i
p
)
(
5
)マキシム・ジャハン株式会社守 M
A
X
6
6
9,1 w
e
bページ
(
h
t
t
p
:
/
/
w
w
w
.
i
a
p
a
n
.
m
a
x
i
m
i
c
.
c
o
m
/
q
u
i
c
k
_
v
i
e
w
2
.c
f
m
/
q
v
p
k
/
3
2
5
6
)
M型サーミスタ, w
e
bページ
(
6
)立山科学工業株式会社。 B
(
h
t
t
p
:
/
/
w
w
w
.t
at
e
y
a
m
a
.i
.
p
/
p
r
o
d
u
ct
/
c
at
a1
o
g
/
2
0
0
8
/
p
df/bI
b
m
c
l
_
2
8
p
2
9
p
.p
d
f
)
© Copyright 2026 Paperzz