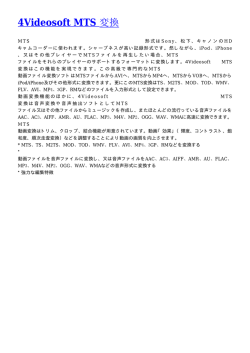
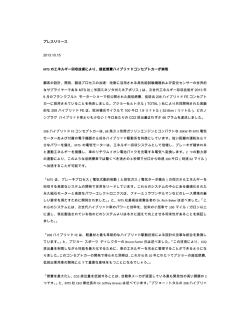
HSRC の導入 バーチャルモデルまたはハイブリッドシミュレーションと実試験との統合には、車両開発プ ロセスの短縮と向上に対して大きな可能性を秘めています。しかし、開発や実装を成功さ せることは相当困難なことです。中でも一番困難なものには、実試験システムの制御要 件や仮想モデルの複雑性 (例えばエラストマーおよびタイヤなど非線形挙動を示す部品) が原因で、リアルタイムでシミュレーションが実施できない状態があります。これらの条件 でのハイブリッドシミュレーションを有効にするために、MTS はハイブリッドシステムレス ポンスコンバージェンス (HSRC;ハイブリッドシステム応答収束) を開発しました。これ は、乗り心地や耐久性などのより複雑なアプリケーションに有用なハイブリッドシミュレー ションを実施するイタレーション技術を備えています。 典型的な HSRC アプリケーションの一例は、実試験車両を一車両分の仮想タイヤと連 結させ、それら全てをデジタル式三次元試験路面上を「走行」させています。 試験車両は ロードシミュレーターに設置され、車両スピンドルで加振させることが可能です。これは、 車両と仮想タイヤ間のインターフェースとして作動します。ロードシミュレーターは力と動き のセンサを搭載し、個々のイタレーション処理中におけるスピンドルの動的挙動を測定し ます。仮想側では、これらのタイヤが路面上の仮想の「ドライバー」によって操作されてい ます。 HSRC アプリケーションは、実試験車両との仮想タ イヤ一式を連結し、それら全てをデジタル三次元試 験路面上で「走行」させています。 HSRC システムは、物理的および仮想シミュレーションを交互に実行し結果を生成しま す。最初の加振は実車両で実行され、そしてその結果として生じるスピンドル力と動きが 保存されます。各制御軸に関してスピンドル応答 (力または動き) のうちのどちらかは、 仮想シミュレーションにおいてタイヤの挙動を制御することに使用されます。 例えば、実試験装置にて測定される上下力は、仮想路面上で運転される仮想タイヤの上 下荷重を制御するために用いることができます。これにより、仮想タイヤの軸中心に特有 な上下運動が生成され、この運動はタイヤの動特性および路面に基づくものです。次に システムは、同じ力が仮想タイヤに与えられたときに計測されるタイヤの動きによって生 じる車両の力による試験機の動きを比較します。もし動きが同じでない場合、ハイブリッド システムのどちらかがまだ動的に一致して動作していません。 動きの違いまたは収束エラーを用いて、HSRC 制御モデルは実試験機の動特性を変化 させ、結果として新たな力と動きを測定します。これにより、新しい仮想試験条件や新たな 収束エラーの結果を生み出します。継続的なイタレーション通じて、HSRC は試験機上で 計測された力を生成するのと同じ結果を生じるように仮想タイヤに与えたことにより生じる 力を発生させる上下力のロードシミュレーター・ドライブファイルを最終的に生成します。こ の時点で、シミュレーションの両方が収束し、リアルタイム動的システムとして双方が結合 した状態で正確に機能します。 上記は、単軸における上下運動の収束の簡略化した例です。実際の HSRC アプリケー ションでは、収束は全てのDOFに対して、4 軸全ての車両スピンドルが同時に収束する 動的挙動を再現する最終ドライブファイルを生成します。 HSRCで生成された荷重は、実走行路面測定から 得られた疲労限界荷重と高い相関を示します。 MTS は、HSRC を実行可能なシミュレーション技術にするために、技術的および操作上 の課題の両方を克服しなければなりませんでした。 技術面の重要な課題は、シミュレーションを開始する場所を決定することでした。この問 題を解決するために、MTS は有効な開始点からイタレーションプロセスを起動するため に、占有の方策を開発し、収束に必要なイタレーション回数を大きく減少させました。確か な開始点はまた、実物の供試体を損傷させやすい、不適切な初期荷重を避けるために重 要です。その他の技術的課題には、座標を基に仮想試験路面上で「車体のない」(仮想 の) 4 本のホィールとタイヤを「走行」させる方法を考案することがあります。また、シミュ レーションを収束へと促進させる方向に、正しくドライブファイルを更新するエラー変換に よる補償機能を開発することも含まれていました。 HSRC を操作上実用的にするために、ユーザーを考慮して複雑性を最小限にする、統 合ソリューションコンポーネントを取り入れました。座標の調整、およびDOFの整合、極性 の整合、仮想走行やプロセスの開始など多くの動作は、「内部」で管理するよう設計され ており、オペレーターのエラーにより、シミュレーションの質や試験日程に悪影響を及ぼす ことを最小限に抑えます。MTS はまた、HSRC に対し、RPC® Pro ソフトウェアを使用 するどの技術者にも良く知られているメニュー方式の手法を開発しました。 現在のところ、HSRC 技術は 5 つの主な自動車会社の開発拠点で行われた 6 種類 の車輌での評価プログラムにて検証されました。収束は、全ての場合において成功しまし た。 コンセプトが始めに立証されたのは、2010 年の Audi でした。Audi A5 Coupé が、スピ ンドル結合のロードシミュレーターに搭載されました。これには、仮想車輌タイヤ (Tire™モ デル) と ADAMS の環境で作動するデジタルロードセクションが組み合わされました。 Audi と共同で、MTS はロードシミュレーター向けの 20 チャネルの制御信号セットを開 発しました。これは、Audi のプルービンググラウンドから選ばれた路面を再現する3 つ の悪路耐久性試験プロファイルのためでした。 最初の評価として、HSRC を用いて開発された物理的スピンドル荷重が、他の 3 つの 方法によって得られる車両スピンドル荷重と比較されました。その3つの方法とは、A5 用 の路面荷重測定、類似した車両向での路面荷重測定、仮想車両モデルから予測された 荷重です。比較の結果、HSRC でつくられる荷重が、実走行路面測定から求めた疲労限 界荷重に高い相関を示し、仮想車両モデルで予測されたものよりも適切な荷重をもたらし ました。 それ以来、MTS は HSRC の機能強化を追求し続け、その効率性の向上およびアプリ ケーション範囲の拡大を図ってきました。MTS は、スタンドアロンアプリケーション (ADAMS の環境を必要としない) でタイヤシミュレーションを統合するために直接 FTire と作業し、イタレーション処理の効率を 85 % 向上させました。第二の業界規準タイヤモ デルのTNO から得た有効な支援は、HSRC が複数のタイヤモデルで機能することを証 明しました。更なる向上により、個別セクションだけでなく、全てのプルービンググラウンド 路面のシミュレーションが可能になりました。 HSRC の技術革新は、今日も引き続き行われています。現在、MTS は従来のフローテ ィング ボディだけでなく、フィックスド ボディ車軸試験構成向けの HSRC 技術を開発し ています。MTS はまた、その他のスピンドルカップルロードシミュレーターだけではなく、 エンジンマウントやステアリングシステム、排気システムといった別のシステムアプリケー ション用の HSRC 技術の追求を検討しています。 乗り心地や耐久性などのより複雑なアプリケーションに対応するイタレーション型HSRC (ハイブリッド システム レスポンス コンバージェンス) が、ハイブリッドシミュレーションに どのように有益なのか、MTS へお問い合わせください。 >> MTSへのお問い合わせはこちら >> ニュースレターの配信登録はこちら
© Copyright 2026 Paperzz