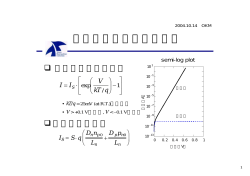
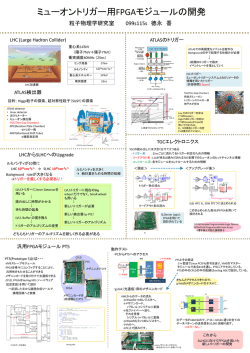
実用化研究報告 高感度超ワイドレンジ型 SQUID 磁束計の開発 岩手大学工学部 准教授 小林 宏一郎 1. はじめに 近年、SQUID 磁束計は超高感度の磁気センサとして、生体磁気計測を中心に様々な分野 に応用が広がっている。しかし、SQUID 磁束計は、高感度であるため環境磁気ノイズの影 響を受け、通常の環境では安定して動作しない。そのため、高価で重たい磁気シールドル ーム(MSR)の中で利用されている。そこで著者は、MSR を利用しない環境で SQUID 磁 束計を安定動作させる制御回路(Flux Locked Loop circuit :FLL 回路)の開発を目指し、FQC (Flux- Quanta Counting)法[1]を応用し、広い動作領域を容易に実現可能なデジタル FLL を実 現してきた[2]。更なる動作領域拡大により、高周波信号検出(非破壊検査、磁性粒子の検 出等)への応用や、都市部などの環境磁気ノイズの大きな場所でも安定した動作を行うこ とが可能である。このためには、デジタル FLL システムのスルーレートを高める必要があ る。 本研究では、高速動作可能な組込デバイスである CPLD(Complex Programmable Logic Device)を用いて、並列演算方式を利用したデジタル制御の高速化を行った[3]。この方式に よるシミュレーションと実験により、並列演算方式が有効であることを示す。 2. 高速化の提案方法 図 1 に、デジタル FLL 回路のブロック図を示す。従来著者のデジタル FLL のデジタル制 御部(Digital Part)には、取り扱いの簡便性より PIC マイコン(Microchip Technology Inc.)を 用いていた[2]。今回は、高速動作かつ並列演算が可能な CPLD を採用し、演算方式の違い に着目した。図 1 に PIC マイコンによる直列演算方式、図 2 に CPLD による並列演算方式 の制御イメージ図を示す。PIC マイコンの直列演算方式では、①A/D 変換→①積分→①D/A 変換の順で制御が行われる。一方、CPLD による並列演算方式では、①A/D 変換後、①積分・ ①D/A 変換と②A/D 変換を同時に行っている。複数の演算を同時に行うことが可能な並列演 算方式の利点をいかし、フィードバック時間 T を短縮し、高速化が可能である。 直列演算方式は、①D/A 変換後(フィードバック出力後)の値が②A/D 変換に入力される通 常のフィードバック制御である。一方、並列演算方式は、①D/A 変換後の値が③A/D 変換に 入力されるため、フィードバック量が更に一つ遅れる制御になる。よって、ループに遅延 要素を考慮する必要がある。 Digital Part Digital Integrator Amp Feedback Coil ADC + DAC + SQUID SQUID Vout Z‐1 Feedback Resister Rf 図 1. デジタル FLL 回路ブロック図 フィードバック時間 T ①積分 ①A/D変換 ①D/A変換 ②A/D変換 ②積分 ②D/A変換 時間[s] 図 2. PIC マイコンによる直列演算方式 フィードバック時間 T ①A/D変換 ②A/D変換 ①積分 ③A/D変換 ①D/A変換 ②積分 ②D/A変換 時間[s] 図 3. CPLD による並列演算方式 3. 特性シミュレーションと評価実験 並列演算方式の遅延要素による影響を検討するため、SQUID センサの変わりに抵抗を用 い、電流制御実験を行った。直列演算・並列演算方式を CPLD で設計し、周波数特性の比 較を行う。また、並列演算方式では、更に 1 つ遅れた制御を行うため、図1のフィードバ ックループに遅延要素(e-jωT )を考慮する。実験用制御回路を基に、シミュレーションモデル を作成する。直列演算方式の伝達関数 GSer を式(1)に、並列演算方式の伝達関数 GPar を式(2) に示す。 G Ser = G Par = G G Rin (1 − e ) + G Rf G A A − j ωT (1 − e …(1) G A G Rin ) + e − jωT G Rf G A − j ωT …(2) ただし、GA は増幅度 A0、変換係数 K を合わせた比例係数を、GRin は入力電圧-電流変換係 数、GRf は出力電圧-電流変換係数を示す。 まず、両演算方式のフィードバック時間 T を等しくした時の周波数帯域の検討を行う。 A/D 変換のサンプリング周波数は、直列演算方式は 500[kHz]、並列演算方式は 250[kHz]で ある。図 4 に、計測した周波数特性を示す。両演算方式の周波数特性が等しくなった。こ ωs=2π/Τs) れは、並列演算方式の伝達関数 GPar に含まれる遅延の項 e-jωT の計測信号ω(周期 s に対し、フィードバック時間 T が非常に小さいため、遅延の項を無視でき、結果的に GPar ≒GSer となるからである。 次に、両演算方式の A/D 変換器のサンプリング周波数を最高速度の 500[kHz]にしたとき の周波数帯域の検討を行う。図 5 に計測した周波数特性を示す。並列演算方式の帯域が、 直列演算の約 2 倍になったことが示される。並列演算方式は、直列演算方式よりも高速に 動作し、周波数帯域の拡大を実現した。 並列演算方式 実測値 シミュレーション GPar GPar = GAGRin (1 − e − jωT ) + e − jωT GRf GA 直列演算方式 実測値 シミュレーション GSer GSer = GAGRin (1 − e − jωT ) + GRf GA 図 4. フィードバック時間 T が等しい場合 並列演算方式 実測値 シミュレーション GPar -3 G Par = G AG Rin (1 − e − jωT ) + e − jωT G Rf G A 直列演算方式 実測値 シミュレーション GSer G Ser = 460 G AGRin (1 − e − jωT ) + GRf G A 950 図 5. ADC のサンプリング周波数が等しい場合 4.評価実験 CPLD を用いたデジタル FLL 回路の並列演算方式を用いて、SQUID 磁束計の動作領域の 拡大を目指す。本実験では、SQUID に外部磁界を印加し、各周波数における計測可能な磁 束量の最大値を計測する。図 6 に、計測した最大磁束量を示す。図 6 の縦軸は最大計測可 能磁束量[Φ0]、磁場強度[nT]、および、システムのダイナミックレンジ[dB]を示す。計測し た周波数帯域において、CPLD による並列演算方式のダイナミックレンジは、CPLD による 直列演算方式の平均 1.94[倍]、PIC マイコンによる従来のデジタル FLL 回路の平均 2.62[倍] になった。 120 Flux Amplitude[Φ 0] 70 7 0.7 0.07 100 102 100 10 101 90 10 10 80 0.1 10‐1 60 1 10 100 1000 1k Dynamic range [dB] ● CPLD,並列演算方式 ○ CPLD,直列演算方式 △ PICマイコン,直列演算方式 Flux amplitude [Φ0] Magnetic flux density [nT] 700 1000 103 10000 10k Frequency [Hz] 図 6. 計測した最大磁束量 5. まとめ CPLDによる並列演算方式は、デジタル制御の高速化に有効的であることを示した。CPLD の高速動作及び並列演算による制御方式が、デジタルFLLの広帯域化に有効的であることが 示された。 謝辞 本研究は、(財)インテリジェント・コスモス学術振興財団によるインテリジェント・コス モス奨励賞と実用化研究助成、および日本学術振興会による科学研究費 基盤研究(B) (21300158)の助成を受けて行われた。また、本研究を強力に進めてくれた当時研究室の 大学院生であった小山大介氏、高坂あすみ氏に感謝いたします。 参考文献 [1]D. Oyama, K. Kobayashi, M. Yoshizawa, and Y. Uchikawa: IEEE Trans. Mag., 42, 3539, 2006. [2]D.Drung:Physica C 368, pp.134-14, 2002. [3]K. Kobayashi, M. Yoshizawa, D. Oyama, Y. Uchikawa: Abstract Book SCC2011 (Superconductivity Centennial Conference), p.272, 2011.
© Copyright 2026 Paperzz