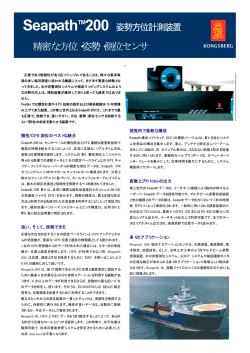
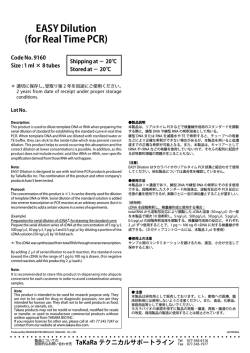
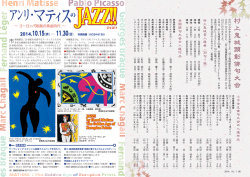
12NInst:02-31 2.5 GPSの誤差 ( ) 測定値が真値に対して一定方向に偏っている誤差 (計測によって修正(校正)できる) ( ) 測定値がはっきりしない原因によって真値の付近でばらつく誤差 (修正(補正)できない.数回の観測の平均など) ( ) 計器の表示の読み違えなどによる誤差 (計測者の技量等にも依存する.間違えに気づいたときは再計 づ 測する) 02-32 誤差の要因: 故意に誤差を起こす ・・・ 受信機の 衛星の SA( ) ・・・ 測位計算で工夫されている(本質的) ・・・ 航法メッセージに含まれる による電波の遅延 ・・・ 複数の周波数の電波を用いて 軽減可・1波でも補正情報を用いて改善 による電波の遅延 ・・・ 補正情報を用いて改善 による電波の遅延 ・・・ 不可避(周囲の状況) による遅延 ・・・ 不可避(これを利用して 降雨の予測?) 1 02-33 誤差の要因(つづき): GPS衛星の配置による精度低下 ・・・ で評価 ○GPSの位置誤差 標準偏差(1σ)によって評価する 位置誤差 = UERE: User Equivalent Range Error,利用者等価距離誤差 GDOP: Geometric Dilution of Precision,幾何学的精度劣化係数 02-34 ○GDOP(Geometric Dilution Of Precision) 物標による測定 測定目標の (a) 交角: 大 で決まる (b) 交角: 小 図2-4: 2物標からの交角 2 02-35 GDOP = √ σxx2 + σyy2 + σzz2 + σtt2 ※ GDOPが . GDOPを空間座標に関する部分と時計に関する部分に分けて, PDOP = √ σxx2 + σyy2 + σzz2 HDOP = √ σxx2 + σyy2 VDOP = σzz TDOP = σtt それぞれ, Position,Horizontal,Vertical,Time を意味する. ※ 衛星を結ぶ4面体の体積は GDOP と密接に関係 4面体の体積が大きいほど,GDOPは小さくなり測位精度が向上 02-36 ○衛星配置と 測位精度 (a) 悪い例: 体積小 → DOP値大 あかs 図2-5: 衛星配置とDOP値の関係 3 12NInst:02-37 ○UERE(User Equivalent Range Error) a. b. c. d. e. f. g. 衛星の時計誤差 衛星の軌道誤差 電離層遅延誤差 対流圏遅延誤差 受信機雑音 マルチパス 選択利用性(SA) UERE = √a2+b2+c2+d2+e2+ff2+gg2 ※ 単位は,すべてm(メートル). 02-38 ○測位精度を上げるには ・GDOPを 衛星を結ぶ多面体の 受信する衛星の 上空を広く見渡せるところにアンテナを置く (マイクロ波の性質) ・連続計測する (測位をはじめてから1分後位で安定) ・DGPSやSBASを利用する (別に機器が必要.§2.8) 4 02-39 2.6 測地系 (geodic system, Datum) z 準拠楕円体 グリニッジ子午線( 経度 高さ O y 経度 赤道(緯度0度) 度) 0 x 緯度 02-40 ○パラメータ 地球の形 ・・・ ( 長半径(A) = 6378137.000 [m] 扁平率(F) = 0.0033528107 ( A = 6377397.155 [m] F = 0.0033427732 で近似 ) (WGS84楕円体) )では, BESSEL(1841)楕円体 X(経度),Y(緯度),Z(高度) もずれる. パラメータ: ΔX,ΔY,ΔZ,ΔA,ΔF により測地系を変換 5 02-41 ○測地系一覧 表2-1: 測地系一覧とパラメータ (抜粋) 測地系一覧 測地系名 ASTRONOMIX STATION 1952 表示 DATUMパラメータ 地域 ΔX A-STATION52 Marcus Island EUROPIAN 1950 EUROPEAN50 EUROPIAN 1979 EOROPEAN79 ORDNANCE SURVEY OF GREAG-BRITAIN36 Europa(Mean Value) Europa(Mean Value) England, isle of Man, Wales, Scotlan NORTH AMERICA 1983 NAD83-1 NAD83-2 NAD83-3 NAD83-4 Alaska Canada CONUS Mexico, Central America TOKYO TOKYO Japan, Korea, Okinawa WGS-72 WGS-84 WGS72 WGS84 World Geodetic System World Geodetic System ΔY ΔZ ΔA ΔF -124 234 25 251.000 0.000014192702 87 86 -375 98 98 1111 121 119 -431 251.000 251.000 -573.604 0.000014192702 0.000014192702 -0.000011960023 0 0 0 0 0 0 0 0 0 0 0 0 0.000 0.000 0.000 0.000 0.000000000016 0.000000000016 0.000000000016 0.000000000016 128 -481 -664 -739.845 -0.000010037483 0 0 0 0 0 0 -2.000 0.000 -0.000000031211 0.000000000000 02-42 2.7 GPS受信機 軌道データ 収集 図2-6: GPS受信機の基本構成 6 12NInst:02-43 ○チャンネル数による分類 (a) 1チャンネル・シーケンシャル受信方式 (b) 1チャンネル・高速シーケンシャル受信方式 (c) 複数チャンネル受信方式 ☆ 近年は, が一般的 8~12チャンネル程度. (ある地点で同時に受信できる衛星の数は多くても8程度なので, 12チャンネル程度で十分) ○GPSのアンテナ アンテナ (GPS衛星からの電波は「円偏波」) ○ GPS 受信機(機器) によるデータ ・ ・ ・ 02-44 (測地系の設定により値を出力) ・・・ 基本機能 : UTCとほぼ一致 受信機で計算 (過去数秒~10秒程度の位置(緯度経度)の変化から計算する) ・ ( : ) ・ ( : ) 付加的機能 (受信機によってはナビゲーション機能もある) ・時計の自動修正 時計の自動修正 ・簡易ナビゲーション (経路の管理,目的地の設定とウェイポイント までの方位距離) ・地図表示および地図上への位置,航跡のプロット ・データ出力 (インターフェイスを介してPC他の機器へデータ転送) 7 02-45 2.8 Differential GPS (DGPS) と SBAS ディファレンシャルの定義 位置(緯度経度)が正確にわかっている場所で測位 GPSシステムの誤差を検出 その近辺の地域の利用者に,誤差または補正係数を送信 そ 近辺 地域 利用者 ,誤差ま 補 係数を送信 ↓ 補正情報を放送 GPS受信機で補正することにより測位精度を改善 ○GPS 基準局 GPS測位による実測位置から求めた各衛星の距離 各衛星から 軌道デ タ 計算 た求めた計算距離 各衛星からの軌道データで計算した求めた計算距離 の差 ==> 擬似距離補正データとして放送 ○利用者側 擬似距離にその補正値を加味して真の位置を計算する 02-46 DGPSの利用 ・伝搬経路上の問題 ・電離層遅延誤差 ・対流圏遅延誤差 ・SA(現在は解除されている) SA(現在は解除されている) などを減少させることができる ○DGPS 局 (海上向け: 長波~中波で放送) 東京・霞ヶ関(コントロールステーション) 金華山 八丈島 室戸岬 瀬戸 大瀬埼 316kHz, 302kHz, 295kHz, 320kHz, 302kHz, 犬吠埼 大王埼 大浜 都井岬 ・・・ 295kHz, 288kHz, 321kHz, 309kHz, 剱埼 江埼 浜田 若宮 309kHz, 320.5kHz, 305kHz, 295kHz, 日本沿岸ほぼ全域で利用可能 8 SBAS( ) 02-47 ○WAAS ( ) ディファレンシャルと同様,GPSの測位精度向上のために補正情報を 送るシステム ・航空用として開発されたが,陸上,海上でも利用可能 ・北米およびハワイで利用可能 (米国のシステム) ・衛星から補正情報を送信 当初はインマルサットを利用.現在は Galaxy 15 と Anik F1R ○MSAS ( ) MTSAT(運輸多目的衛星)を利用してGPSの補正情報を放送する 日本のシステム 使用方法: 受信機の設定メニューで WAAS を「使う」「Enable」等 に設定 9
© Copyright 2026 Paperzz