低速時を含む帆走時の主船体流体力モデル
北海道大学
1. はじめに
帆走性能を推定する際、横流れや旋回運動は大きくない
と仮定し、操縦運動の計算に使用する従来の流体力数学
モデル、あるいは必要に応じてこれに横傾斜の影響など
を付加して使用し、多くの成果を上げてきた。しかし、
大型帆船のタッキングの場合や漁船などで帆を付けた時
の漂流運動などを計算するには、前進船速が小さく、帆
や船の風圧力によって、前進・横流れ・回頭の三つの運
動が同じオーダーとなって、流体力の取扱いが、前進船
速の大きい場合とは大幅に異なって複雑になる。
船舶の操縦運動においても、港内操船における操縦性能
は、検討すべき課題が通常の操縦運動時より多いにもか
かわらず、前進速力が十分大きい場合の推定法が多い。
前進船速が大きい場合の主船体の操縦流体力は、斜航角
が±20°以内、無次元回頭角速度 r’ ( = r (L U ) 、L:船の長
さ、U:船速)も±1 以下である。この時の船体流体力は揚
力が支配的であることから、多くの場合、船体流体力は
斜航角β と無次元回頭角速度 r’ の多項式で表現でき、そ
れぞれの項の係数を微係数として取り扱ってきた。しか
し、港内操船では前進船速が低くなり、特に接岸時など
はタグやスラスターによって真横に移動し、またその場
で回頭する局面も存在する。この場合の斜航角は 90°付
近となり、無次元旋回角速度も 1 を超えてはるかに大き
な値となる。このような局面では上記の多項式表現はも
はや使用できず、別の数学モデルが必要になる。具体的
には、β や r’の周期関数などで表現するといった高品らの
方法 2)などがあり、著者の一人も、実測した大角度の斜航
試験データに旋回の影響を加えるという形で表現を試み
た 3)。また、烏野ら 4) は、前進船速が主体の通常の操縦
運動から港内操船までの幅広い運動に適用可能な成分分
離型数学モデルを試みている。しかし、これらの数学モ
デルはいずれも実績ある通常の操縦運動の数学モデルと
の関連が乏しいなどの問題があり、推定精度が高く求め
られる通常の操縦運動推定の場合と切り離して使い分け
されているのが現状である。
以上の背景を踏まえ、本報では、前進船速の大きい通常
の帆走状態からタッキングなどに至る運動を同一の数式
で表現可能な主船体流体力の数学モデルを検討する。船
の操縦性で言えば、前進船速の大きい通常の操縦運動か
ら接岸に至る港内操船までを同一の数式で表現可能な主
船体流体力の数学モデルに相当する。その際、微小な斜
航・旋回運動に対する特性は通常の操縦運動時と一致さ
せることとし、針路安定性などの検討に従来のデータが
活かせるよう配慮する。また、流体力微係数といったパ
ラメータも必要最小限にとどめ、設計段階における推定
の容易さを確保する。数学モデルの検討には、文献[4]に
公表された PCC 模型船の拘束試験結果、および漁業調査
船の拘束模型試験結果を使用した。
水産科学研究院
芳村
康男
2. 主船体流体力の数学モデル
まず、前進・斜航・旋回による流体力(XH ,YH , NH )の基
本形は、流体力が基本的に速度の自乗であることから、
船体中央における各速度成分(u, v, r )のいずれかの積の和
として表現することができる。
前後方向の力 XH は u に関して奇関数、v と r に関して
は偶関数となるので、( u u )もしくは( uU )、および( vr )
の項を採用する。物理的にこれらは船体抵抗と旋回・斜
航による付加質量による遠心力の前後方向成分に相当す
る。( v v )や( r r )も考えられるが、これらは微小であるの
で省略する。YH と NH は v と r に関して奇偶関数となり、
揚力成分を主体に考えると、( vU )と( rU )の和で構成さ
れる。ただし、後進時の特性を考慮すると、その時の YH
は( vU )と( − rU )、NH は( − vU )と( rU )との和となるの
で、これを統一して表すために、YH は( v u )と( ru )、NH
は( vu )と( r u )の項で表現する。また抗力が主体の横方向
の力とモーメントは別途考慮することとし、これらを YHN、
NHN と表現する。すなわち、
⎫
⎪
YH = b1v u + b2 ru + YHN ⎬
⎪
N H = c1vu + c2 r u + N HN ⎭
X H = a1uU + a 2 vr
(1)
上式を無次元化すると、
(
)
⎫
⎪⎪ (2)
′
YH′ = YH 0.5ρLdU 2 = b1′v ′ u ′ + b2′ r ′u ′ + YHN
⎬
⎪
2
2
′ ⎪⎭
N H′ = N H 0.5ρL dU = c1′v ′u ′ + c ′2 r ′ u ′ + N HN
X H′ = X H 0.5ρLdU 2 = a1′u ′ + a 2′ v ′r ′
(
(
)
)
ただし、 u ′ = u U 、 v ′ = v U 、 r ′ = r (L U ) である。
ここで、前進速力 U が十分大きく、v、r が微小な場合は、
u ′ ≅ 1 となるから、(2)式は次式となる。
X H′ = a1′ + a ′2 v ′r ′
⎫
⎪
′ ⎬
YH′ = b1′v ′ + b2′ r ′ + YHN
′ ⎪⎭
N H′ = c1′v ′ + c2′ r ′ + N HN
(3)
これを従来の流体力微係数で表すと、
X H′ = X 0′ + (m′y + X vr′ )v ′r ′
⎫
⎪
′ ⎬
YH′ = Yv′v ′ + (Yr′ − m′x )r ′ + YHN
⎪
′
N H′ = N v′ v ′ + N r′ r ′ + N HN
⎭
(4)
となり、(1)式の係数( a1 , a 2 , b1 , b2 , c1 , c 2 )が通常の操縦運動
における線形微係数で表せることになる。
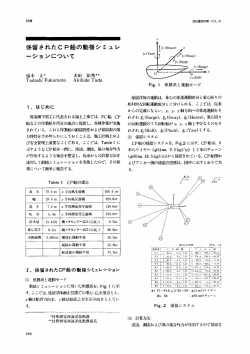
また、YHN、NHN は従来の表現に従えば非線形流体力に
相当し、これらの表現については、文献[3]の cross-flow
drag に対する考え方を引用する。cross-flow モデルは Fig.1
に示すように、船体の前後方向に分割した要素の横抵抗
が、その要素を横切る流速の自乗に比例すると仮定し、
これを船体前後方向の積分した値が横力、また、これに
レバーを乗じて積分した値が回頭モーメントになる。
CrY、CrN のわずか3個であり、データを蓄積すれば実験
を行うまでもなく比較的容易に推定できるものと期待で
きる。
3. 数学モデルの適用例
前述の数学モデルを用いて流体力の解析を行い、計測さ
れた流体力をどの程度表現できるかを確認する。流体力
データは文献[3]の PCC 模型船の深水域の拘束試験結果、
および漁業調査練習船の拘束模型試験結果である。供試
模型船の主要目を Table 1 に示す。
Table.1
Principal dimensions of ship models
PCC model
Research
ship model
Lpp
(m)
3.0000
1.9828
B
(m)
0.5367
0.4138
d
(m)
0.1367
0.1517
Cb
0.547
0.5743
-0.0422
-0.0372
xG (=-lcb) (m)
v+rx
Fig.1
Schematic view of cross-flow drag.
しかし、この方法では横力とモーメントを同じ係数で表
すことに無理がある他、旋回による横流速成分が単純な
斜航状態と異なるなどの問題がある。そのため、次式の
ように r に関する修正係数 CrY、CrN を設けて表現する。
すなわち、
L/2
⎛ρ⎞
YHN = −⎜ ⎟dC D 0 ∫
v + C rY rx (v + C rY rx )dx
−
L/2
⎝2⎠
N HN
⎫
⎪
⎪ (5)
⎬
L/2
⎛ρ⎞
= −⎜ ⎟dC D 0 ∫
v + C rN rx (v + C rN rx ) ⋅ x ⋅ dx⎪
−L / 2
⎪⎭
⎝2⎠
なお、(4)式の XH において、船体抵抗係数が前進中と後進
中で異なること考慮して、これを単純に斜航角の関数と
して次式で表す。
X 0 = X 0 ( F ) + (X 0 ( A ) − X 0 ( F ) )( β π )
(6)
ただし、 X 0 ( F ) : 前進直進中の抵抗係数
X 0( A ) : 後進直進中の抵抗係数
以上をまとめると、主船体の流体力の数学モデルが最終
的に次式で表される。
X H = {X 0 ( F ) + (X 0( A ) − X 0( F ) )(β π )}uU
⎫
⎪
+ (m y + X vr )vr
⎪
⎪
YH = Yv v u + (Yr − m x )ru
⎪
⎪ (7)
L/2
⎛ρ⎞
− ⎜ ⎟dC D 0 ∫ v + C rY rx (v + C rY rx )dx ⎬
−L / 2
⎝2⎠
⎪
⎪
N H = N v vu + N r r u
⎪
⎪
L/2
⎛ρ⎞
− ⎜ ⎟dC D 0 ∫ v + C rN rx (v + C rN rx )x ⋅ dx ⎪
L
−
/
2
⎝2⎠
⎭
この数学モデルの特徴は、微小な斜航・旋回運動に対す
る特性を通常の操縦運動における数学モデルと一致させ
得る点にある。線形の微係数の特定には各機関の従来の
データベースが活用できる他、貴島らの推定式 5)を用いる
こともできる。また、cross-flow drag に関する係数は、CD0、
3. 1 PCC 模型船への適用
文献[3]の PCC の模型実験はβ が 0°∼180°また r’ は
0, ±1, ±2 で実施されている。このデータに(7)式の数学
モデルを適用するに際しては、この模型船の通常操縦運
動時の流体微係数が公表されている文献[5]から Y と N に
関する線形微係数を解析した。また CD0、CrY の cross-flow
drag の係数は、β=90°の Y’H から次式で解析する。
C DO = YH′ ( β =90°, r = 0 )
C rY =
⎫
⎪⎪
12 ⎛ d (YH′ ( β =90° ) ) ⎞ ⎬
⎜
⎟⎟ ⎪
C D 0 ⎜⎝ d r ′ 2
⎠ ⎪⎭
(8)
( )
また、CrN はβ=0°(v’=0)の N’H から次式で求める。
CrN = 4
2
CD 0
⎛ d (N r′ r ′ − N H′ ( β = 0° ) ) ⎞
⎜⎜
⎟⎟
d r ′2
⎝
⎠
( )
(9)
これらの係数を Table. 2 に掲げる。
流体力の計測結果と(7)
式の数学モデルによる流体力特性の比較を Fig.2 に示す。
各図中のシンボルが実測値で、曲線が対応する数学モデ
ルによる計算値である。X’H の計測値は複雑に変化してい
るので、やや近似が悪いが、Y’H と N’H はかなり実際の特
性に合っており、提案した数学モデルの有効性が確認で
きる。特に、Y’H において、β=90°の前後の 70°、110°
付近で 90°よりやや大きくなる傾向を上手く表現できて
いる。一方、通常の操縦運動範囲における流体力の比較
を Fig.3 に示す。実験は舵・プロペラ付きであるが、同時
に計測された舵力成分を控除している。この運動範囲で
は、流体力の線形特性が確保されているため、Y’H と N’H
の一致度は良く、通常の操縦運動の推定も期待できる。
0.4
0.4
r'=2
r'=1
r'=0
r'=-1
r'=-2
X' H
0.2
r=2
r=1
r=0
r=-1
r=-2
0.2
0.0
0
X' H
30
60
90
120
150
β (deg) 180
0.0
0
-0.2
-0.2
1.5
-0.4 Y' H
2.0
-0.4
30
60
90
120
150 β (deg) 180
60
90
120
150 β (deg) 180
60
90
120
150 β (deg) 180
Y' H
1.5
1.0
1.0
0.5
r=0
r=1
r=2
r=-1
r=-2
r'=2
0.5
r'=1
r'=0
0.0
0
0.6
-0.5
30
60
r'=-1
90
r'=-2
150 β (deg) 180
120
0.0
0
0.6
-0.5
N' H
30
N' H
0.3
0.3
0
0.0
0
30
60
90
120
150
180
-0.3
0
30
r=0
r=1
r=2
r=-1
r=-2
-0.3
β (deg)
-0.6
-0.6
Fig.2 Comparison of hull force components between
measured and approximated (PCC model).
0.00
-20
-10
0
X' H
10
β (deg)
Fig.4 Comparison of hull force components between
measured and approximated (Research ship model).
0.00
20
-20
-10
0
X' H
10
β (deg)
20
-0.02
-0.02
-0.04
-0.04
0.2
r=0.6
r=0.4
r=0.2
r=0
r=(-)
0.1
0.0
-20
-10
0.24
-0.06
r=0.8
r=0.6
r=0.4
r=0.2
r=0
r=-0.2
r=-0.4
r=-0.6
Y' H
0
10
β (deg)
-20
20
0.12
0.00
-10
0.10
10
β (deg)
20
-0.2
0.05
-10
0
0.12
r=0.8
r=0.6
r=0.4 -0.24
r=0.2
r=0
r=-0.2
r=-0.4
r=-0.6
N' H
0.00
-20
0
-0.12
-0.1
r=0.6
r=0.4
r=0.2
r=0
r=(-)
Y' H
10
β (deg)
-0.05
-0.10
Fig.3 Comparison of hull force components between
measured and approximated (PCC model).
N' H
0.06
0.00
20
-20
-10
0
10
β (deg)
-0.06
-0.12
Fig.5 Comparison of hull force components between
measured and approximated (Research ship model).
20
Table.2
m'y +X'vr
Y'v
Y'r-m'x
N'v
N'r
CD0
CrY
CrN
Coefficients of mathematical model eq.(7)
PCC model
Research
ship model
0.1232
0.1180
-0.2629
-0.4973
0.0262
0.0021
-0.0977
-0.1696
-0.0505
-0.0689
0.648
1.201
1.735
1.355
1.309
0.858
3. 2 漁業調査船模型への適用
大斜航角の拘束模型試験は水産工学研究所海洋工学総
合実験水槽にて、主船体だけの状態で実施した。曳航速
度は 0.2m/s とし、PCC と同様な方法で実験を行い解析し
た。これらの係数を Table. 2 に掲げる。斜航角が 180°に
至る計測結果と(7)式の数学モデルによる流体力特性の比
較を Fig.4 に示す。本模型船は船首バルブが大きいためか、
N’H が前進と後進でかなり非対称になり、適用結果は先の
PCC 模型船に比べてやや劣る。しかし、全般的な流体力
の傾向は良く表していると思われる。
通常の操縦運動範囲における流体力の計測は舵・プロ
ペラ付きで実施したが、PCC 模型船と同様、舵力成分を
控除している。流体力の比較を Fig.5 に示す。β が 10°以
上では Y’H と N’H は実験結果とやや外れる傾向にあるもの
の、それ以内では良くあっていると言える。
4. 操縦運動のシミュレーション
本報の数学モデル(7)式を用いて操縦運動をシミュレーシ
ョンした結果を Fig.6、Fig.7 に示す。供試船は自由航走模
型試験結果のある文献[6]の PCC で、舵力・プロペラの特
性は文献に示された特性を使用し、各図に点線で示す。
これらを比較すると、Fig.6 に示すように、舵角 35°の旋
回航跡は、主船体流体力をβと r’の3乗多項式で実験結果
を忠実に近似した従来の数学モデルとほとんど遜色なく
表現できていることがわかる。また、Fig.7 はスパイラル
特性の比較を示すが、本数学モデルによる結果は小舵角
で旋回角速度がやや小さ目に計算される傾向にあるもの
の、大舵角ではむしろ実測に近い結果が得られている。
original MMG
Fig.7
前進船速の大きい通常の帆走状態からタッキングなど
に至る運動を同一の数式で表現可能な主船体流体力の数
学モデルについて検討を行った。本研究の主な結論を以
下に要約する。
1) 従来の揚力主体の流体力をベースに cross-flow モデル
を若干変形した流体力を加算する形で提案した(7)式
は、パラメータが少ないにもかかわらず、広範なβ と
r’の運動に対して主船体流体力を表現できる可能性が
ある。
2) 詳細に比較すると、前後方向の流体力の表現にやや荒
さが認められるが、通常の操縦運動の推定の範囲では、
基本的な特性が押さえられているため、推定精度を大
きく低下させる要因にはなっていない。
今後の課題として、今回は Cb の比較的小さい船型を対象
としたが、船の操縦性能推定などには Cb の大きなタンカ
ー船型においても有効性の確認が必要である。また、港
内操船では浅水域となるので、こうした場合の適用につ
いても検討を進める必要があろう。
参 考 文 献
1)
2)
3)
4)
Fig.6
Comparison of 35 deg Turning circle between
measured and simulated (PCC model).
Comparison of spiral curve between measured and
simulated (PCC model).
5. おわりに
simulated by eq.(7)
original MMG
simulated by eq.(7)
5)
6)
芳村康男, 田辺穰, 大杉勇, 雨宮伊作, 多田納久義,
大型練習帆船の帆走性能の推定,日本航海学会論文集,
84, p19-27, (1991).
高品純志:タグによる操縦運動とその計算法につい
て, 日本造船学会論文集, 160, 1986, pp.93-102.
芳村康男:浅水域の操縦運動モデルの検討(第 2 報),
関西造船協会誌, 210, 1988, pp.77-84.
烏野慶一, 岡野誠司, 前川和義, 三好潤:簡易渦モデ
ルを用いた操縦運動中の主船体流体力の成分分離型
数学モデル(その 5), 日本造船学会論文集, 190, 2001,
pp.169-180.
芳村康男:浅水域の操縦運動数学モデルの検討, 関西
造船協会誌, 200, 1986, pp.41-51.
貴島勝郎, 名切恭昭:船舶操縦性能推定の実用的計算
法に関する研究,西部造船会会報,105, 2003, pp.21-30.
© Copyright 2026 Paperzz