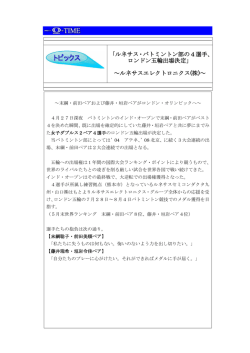
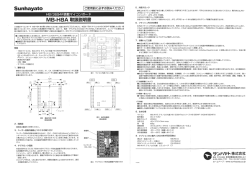
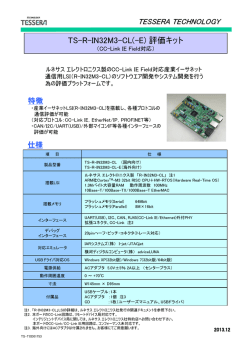
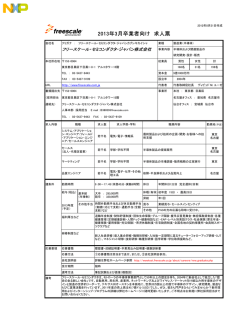
車載マイコンの現状について ~2008年度サーベイ~ 2008年11月28日 (財)九州先端科学技術研究所 車のエレクトロニクス化 トヨタ自動車(1996 - *1936) 燃費: 7 km/l センサー: 無 ECUs: 無 トヨタ自動車(Prius HEV 2006) 燃費:35.5 km/l センサー: 約100 ECUs: 約70 ECU: Electronic Control Unit 快適、かつ、高性能(燃費)で 環境に優しい、安全な 自動車が常に求められている 2 車のエレクトロニクス化 • 高性能(低燃費)化、環境に優しい • 安全性の向上 • 快適性、利便性の向上 高性能(低燃 費)化、環境 に優しい ハイブリッド制御 エンジン制御 安全性の向 上 快適性、利 便性の向上 1970年 エアバッグ、ABS、電子制御サスペンション ETC カーナビゲーション、AV 電動ミラー、電動シート、オートドアロック 1980年 1990年 2000年 車のエレクトロニクス化 それぞれのECUは独立した組込みシステム! 4 車載マイコン 車載マイコンとは: ECUに用いられる、CPU、および、CPUと周辺機能 やメモリを集積するデバイス • MCU(Micro Control Unit) – CPUの他、プログラムの実行に必要なメモリ、周辺回路を集積 • MPU(Micro Processing Unit) – メモリや周辺回路などは外付け 車載用として用いられる、マイコン(MCU、MPU)製 品の現状をサーベイ 車載マイコンの搭載数 (個) 国産ミドルクラス1台あたりにおける マイコンの平均搭載数 40 30 20 10 0 1980 1985 1990 1995 2000 2005 出典:矢野経済研究所, ”車載用MCUと半導体メーカの自動車戦略2005” 車載マイコンの用途 パワートレイン制御 安全制御 • ガソリンエンジン • ディーゼルエンジン • ハイブリッド • トランスミッション など • アンチロックブレーキ • ブレーキアシスト など ボデー制御 • ライト • ドア開閉 • パワーウインドウ • ワイパー • エアコン • オーディオ • ダッシュボード • エアバッグ など マルチメディア • カーナビ • 車線維持支援 • 駐車支援 • プリクラッシュ・セーフティ • 車間距離警報装置 など 半導体各社の車載マイコン 車載マイコン向きに用いられているCPUの例 性 能 フリースケー ル・セミコン ダクター社 ボディ 高 MPC55xx(32) ↑ S12(16) 低 S08(8) 高 V850ES(32) NECエレクト ↑ ロニクス社 低 78K0(8) SH2A-FPU(32) M32C/80(32) ルネサステ クノロジ社 パワー トレイン 安全 マルチメディア・ 情報通信 MPC55xx(32) MPC55xx(32) MPC5xxx(32) S12(16) S12(16) i.MX(32) V850ES(32), V850E(32) V850系(32) ARM11(32) SH7050(32) M32R(32), SH-4A(32) SH-4(32) 78K0S(8) SH-4A(32) M32R-FPU(32) 高 ↑ M16C/60(32/16),H H8S, H8SX(16) 低 8S,H8SX(16) M32R-FPU(32) R8C(16) Infineonテ クノロジーズ 社 高 ↑ XC22xx(16) 低 XC866(8) ()内は基本命令のデータ幅 TriCore(32) XC23xx(16) 出典: XC164(16) フリースケール・セミコンダクタ社ホームページ:http://www.freescale.co.jp NECエレクトロニクス社ホームページ: http://www.necel.com ルネサステクノロジ社ホームページ: http://japan.renesas.com Infineonテクノロジーズ社ホームページ: http://www.infineon.com 車載マイコンに用いられる 主な周辺機能、メモリ ネットワークインターフェース • LIN (Local Interconnect Network) • CAN(Car Area Network) • FlexRay 等 センサー入力 • A/D変換器 制御出力 割り込み制御 タイマカウンタ フラッシュメモリ ROM RAM (<20Kbps) (<1Mbps) (<10Mbps) 車載マイコンの製品構成の例 (ルネサステクノロジ社) 1000 ● マルチメディア + マルチメディア 動作周波数(MHz) • カーナビ (メモリは外付け) • 車線維持支援 • 駐車支援 • プリクラッシュ・セーフティ • 車間距離警報装置 など ボディ (ダッシュボード の表示) 100 ■ 安全 ◆ パワートレイン *ボデー 10 0 500 1000 ROMサイズ(KByte) 1500 出典: 2000 “ルネサス オートモティブ,” 2008年10月 “ルネサス 自動車マイコン,” 2008年4月 車載マイコンの製品構成の例 (ルネサステクノロジ社) 動作周波数(MHz) 1000 ボデー (ダッシュボード の表示) 100 • 16ビット、32ビットCPU • 性能要求小 – 動作周波数32MHz以下(ダッシュボードの 表示を除く) • プログラムサイズ小 ■ 安全 *ボデー 10 0 500 1000 ROMサイズ(KByte) 1500 出典: 2000 “ルネサス オートモティブ,” 2008年10月 “ルネサス 自動車マイコン,” 2008年4月 車載マイコンの製品構成の例 (ルネサステクノロジ社) 動作周波数(MHz) 1000 • 32ビットCPU • 動作周波数(40MHz~80Mhz) • プログラムサイズ大 100 ◆ パワートレイン 10 0 500 1000 ROMサイズ(KByte) 1500 出典: 2000 “ルネサス オートモティブ,” 2008年10月 “ルネサス 自動車マイコン,” 2008年4月 車載マイコンの製品構成の例 (ルネサステクノロジ社) 1000 ● マルチメディア 動作周波数(MHz) • カーナビ (メモリは外付け) + マルチメディア • 車線維持支援 • 駐車支援 • プリクラッシュ・セーフティ • 車間距離警報装置 など 100 • 性能要求大 • – 32ビットCPU – 動作周波数(240MHz~600Mhz) – マルチコア化、専用HWを用いた 高速化 10 • メモリは外付け 0 500 1000 高速な制御が求められる – 32ビットCPU – 動作周波数(80MHz~ 160Mhz) ROMサイズ(KByte) 1500 出典: 2000 “ルネサス オートモティブ,” 2008年10月 “ルネサス 自動車マイコン,” 2008年4月 車載マイコンの高性能化 • 性能要求の高い用途 – マルチメディア – マイコンの統合化 • 性能向上手法 – アクセラレータの使用 – マルチコア化 – 並列化 車載マイコンの性能向上手法 アクセラレータの使用 デバイス ベンダ アクセラレータ 主な用途 NaviEngine NECエレクトロニクス 描画エンジン カーナビ SH77650 ルネサステクノロジ カーナビ 画像認識専用H/W SH77650 (ルネサステクノロジ) カーナビ向けマイコン 白線検知などの走行支援のための画像認識を行う • 高い性能が必要な、画像認識のため、画像認識専用ハードウェア(画像 認識エンジン)を、アクセラレータとして搭載。 • 上記、画像認識の実行をホストCPUから、画像認識エンジンへオフロード。 ホストCPU (32ビット) 画像認識 エンジン 周辺 機能 周辺 機能 出典:ルネサステクノロジ SH77650, http://japan.renesas.com/fmwk.jsp?cnt=sh77650_child.htm&fp=/applications/automotive/automotive_segment/infotainment/child_folder/child_folder/&title=SH77650 車載マイコンの性能向上手法 マルチコア化 デバイス ベンダ コア 主な用途 NaviEngine NECエレクトロニクス ARM11 x4個 カーナビ SH7786 ルネサステクノロジ SH-4A x2個 カーナビ MPC551x フリースケール Power x2個 ボディ制御等 NaviEngine (NECエレクトロニクス) カーナビ向けシステムLSI カーナビ用アプリ開発の課題 • ソフト開発の大規模化 • 高い性能要求 → 1. 既存のシングルCPU用ソフトを、そのまま実行可能、高性能化 2. 固定的な機能(2D/3D描画)に関し、専用HWエンジンを用いCPUから実 行をオフロード ARM11 ARM11 ARM11 ARM11 MPCore 周辺機 能 高性能 描画エンジン ビデオ キャプチャ LCD コントローラ メモリインターフェース 出典:NECエレクトロニクス ホームページ(http://www.necel.com/applications/ja/automotive/naviengine/spec.html) MPC551xファミリ (フリースケール・セミコンダクター) ボディ制御 高性能化により、ボディ制御に用いる機能を集約しマイコンの数を削減 メインCPU • 主なアプリの実行 I/Oプロセッサ • 基本的な命令のみを実装に絞り、面積コストを削減 • 割り込み処理など、メインCPUの補助的な役割 メインCPU (32bitマイコン) I/Oプロセッサ (32bitマイコン) クロスバスイッチ 周辺機能 メモリ (フラッシュ, SRAM) 参考文献: “MPC5510: Power Architecture 32-bit MCU for Automotive,” Freescale Semiconductor 車載マイコンの性能向上手法 XGATEとeTPU (フリースケール・セミコンダクタ) • 割り込みによるタスク等を、ホストCPUからオフロード – XGATE:S12(16bitマイコン)のコプロセッサ(XGATE) – eTPU :汎用の周辺機能(eTPU)として搭載 XGATE ホスト CPU (16bitマイコン) eTPU ホスト CPU (16bitマイコン) RISC プロセッサ タイマー・ カウンター RISC プロセッサ 割り込み • ホストCPUのタスクのオフロード • 割り込み処理のオフロード 参考文献: • ある時間間隔により実行 されるタスクのオフロード “Using the XGATE for Manchester Decoding”他, Freescale Semiconductor “eTPU: Enhanced Time Processor Unit,” Freescale Semiconductor オフロードによる性能最適化 発熱大 リアルタイム性を満た すために必要な性能 動作周波数が2倍のCPU CPU 2X 性能不足 X CPU 時間 コプロセッサにオフロード (CPUは同じ) CPU コプロ セッサ 21 IMAPCAR(NECエレクトロニクス) 画像認識向けシステムLSI • 画像認識のための高い性能要求 • 自動車の走行する環境、検出対象に合わせデバイスをプログラム可能 • 画像認識に適したハードウェア構成 外部メモリ(SSRAM) メモリ転送制 御部 DPLL キャッシュ シーケンス 制御部 制御プロセッサ 演算部 ビデオ 入出力制御部 PE 128並列プロセッサ 8-bit 4ay VLIW PE PE PE 制御プロセッサ 画像メモリ 128並列プロセッサ部ブロック図 I/Oレジスタ CPUバスインターフェース IMAPCARブロック図 PE レジスタファイル(8bits x 28本) 画像I/O 出典:”「車載組込み用画像認識プロセッサIMAPCAR,”NEC技法 Vol.60 No.2/2007 ALU ALU ALU LSU Acc.Reg. RAM Acc. PE部ブロック図 まとめ アプリの所望の性能を実現しコストを最小化 • 8bit~32bitマイコンが使用される • アプリサイズに応じ異なるROMサイズ、アプリに必要な周辺機能 による、多品種構成 車載マイコンでもマルチコア化 • • • • 動作周波数による高性能化から並列化による高性能化 統合化によるマイコンの数の削減 性能クリティカルなタスクのオフロードによる性能最適化 アクセラレータを用いた性能クリティカル箇所のオフロードによる 性能最適化
© Copyright 2026 Paperzz