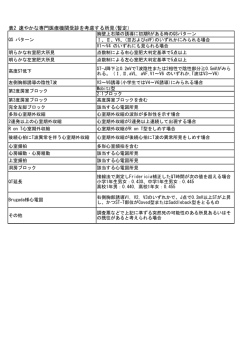
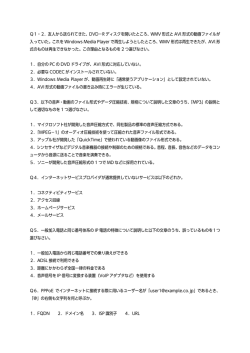
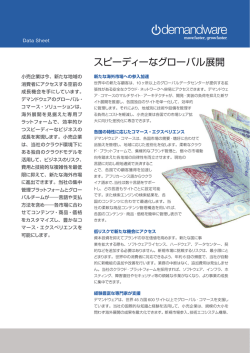
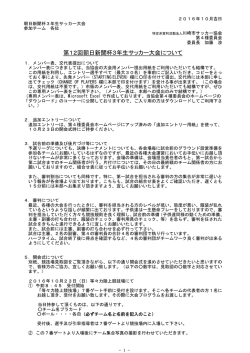
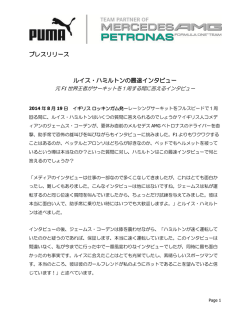
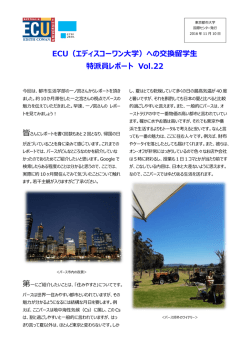
06 C A L I B R AT I O N O F O F F - R O A D E N G I N E S From Virtual Test Bench to Series Production バーチャルテストベンチからシリーズ生産へ Wolfgang Beer氏、Marijn Hollander氏、Michael Kordon氏、 Christian Kozlik氏、Bernhard Raser氏、AVL List GmbH Hardware-in-the-Loopシステムによるオフロードエンジンの適合 自動車工学の見地から、オフロード車ほど間口の広い分野はまずありません。エンジンのバリアントや組立て品の数が多く、運転 条件も非常に多種多様なので、開発・適合には厳しい要求が課されます。関連する多くのさまざまなタスクを効率的に、しかも質 の高さを常に念頭に置きながら実行しなければならないため、AVL社はETAS LABCAR Hardware-in-the-Loop(HiL)テストシ ステムを利用して機能を絞り込んだ適合を行っています。 R E A LT I M E S AVL社は、内燃機関を持つあらゆる種類の フロントローディング、さらに的確なツー は、最終的な量産データを使用して、機能 パワートレインシステムと計測・テストシ ルやメソッドにより達成できます。 の適合を実験室で行うことさえ可能になり 企業です。AVL社のエキスパートは多くの 電子制御ユニット(ECU)の適合には、非 開発したモデルベースのエンジン最適化手 特殊車両・乗用車メーカーのために尽力し 常に特殊な課題があります。それは、考え 法(MoBEO)のおかげです。この手法で ています。 られるすべてのバリアントについて、世界 は、エンジンモデルを使用して排気ガスお 中に存在する多種多様の排気ガス規制基準 よび燃焼挙動を非常に正確に可視化できま AVL社の商用車部門は、切削機、ブルドー に準拠しながら、あらゆる気候条件(標 す 。 MoBEOは 強 力 で フ レ キ シ ブ ル な ザ、クレーンなどの建設車両のほか、農業 高、高温、および低温の影響など)を実車 ETAS LABCAR HiLシステムと連携して動 用車両やオンロード車も扱っていて、機能 で再現しようとすると、コストが跳ね上 作します。 性および効率性について高度の要求が課さ がってしまいます。また、オフロードプロ れています。一方、オフロード車部門は、 ジェクトに投入されるテスト車両の台数が 駆動機器のバリアント数が多く、非常に多 比較的少ないことも問題です。これらの問 この「バーチャル」テストベンチは 種多様な気候の地域に納車される割には生 題は、HiLシステムの採用により克服でき 産台数が非常に少なく、さまざまな排気ガ ます。 PUMA/CAMEO/LABCARの複合システ ム(図1)で構成されています。テストの 設定と実行は、AVL CAMEOTMオート う特殊な課題を抱えています。これに対応 過去数年にわたり、AVL社は量産車の適合 メーションソフトウェアにより、実際のテス して、コストを抑え効率的に確かな開発品 をサポートするためにHiLテストを採用し トベンチを使用する場合と同様に行います。 質を一貫して実現していく必要がありま てきました。その結果、ほとんどの量産車 ました。これが実現できたのは、AVL社が ステムの開発・最適化を行う世界最大級の ス規制基準に対応しなければならないとい 「バーチャル」テストベンチ す。これらは、モジュール式 プラット の検証をHiLシステムで、つまり実際のエ フォームというコンセプト、厳密なデザイ ンジンやテスト車両が使用可能になる前 CAMEOは、標準化されたインターフェー スを使用してAVL PUMAテストベンチシ ステムやETAS INCA適合ソフトウェアと ン to コストプロセス、各開発ステップの に、十分に行うことができました。今日で 通信します。 ES690 ECU CCP/ETK I/O P P/I TC TCP/IP TC P/I P ASAP3 AC I 図1:PUMA/CAMEO/LABCAR複合システムの構成 サーバー CAN J 2/2012 07 08 C A L I B R AT I O N O F O F F - R O A D E N G I N E S PUMAシステムは、リアルタイム CAN カードをLABCAR HiLシステムとの接続に 使用します。HiLシステム上のモデルによ り、ユーザーから高い支持を得ています。 現在、AVL社はPT-LABCAR(PTはパワー できます。また、物理値と経験値を組み合 りシミュレートされているダイナモメータ トレインの意味)を採用してエンジン制御 わせて使用することにより、非常に高い精 に設定値を送ります。そのHiLシステムか ユニットのテストを最適化しています。PT- 度を実現できます。 ら、エンジンモデルの処理結果(トルク、 LABCARのオープンなモジュール式アーキ 温度、圧力、排気ガスなど)および燃焼パ テクチャにより、将来の要求に合わせてテ エンジンモデルを適合に使用するための大 ラメータ(ピーク圧 力 、燃 焼 コア)が ストシステムを容易に適応させ、機能を拡 前提として、非常に高精度なシミュレー PUMAシステムに送り返されます。 張することができます。 ション結果が要求されます。開発エンジニ 結果として得られたデータはテストベンチ モデルベースのエンジン最適化 に、バーチャルテストベンチで行う作業に のホストコンピュータに格納されるので、 (MoBEO) は実環境の場合と同様に非常に高い精度が 適 合 エ ン ジ ニ ア は 計 測 デ ー タ を AVL 要求されます。計測の出力データはモデル CONCERTO™などの後処理プログラムで AVL社が開発したモデルベースのエンジン 最適化手法(MoBEO)により、非常に早 るアプローチを使用することにより、過渡 サイクルのシミュレーションも高速で処理 アに作業しやすい適合環境を提供するため 精度向上のために継続的に使用されます。 図2: 解析できます。このバーチャルテストベン い開発段階でも、実際のテストベンチから このアクティビティが、HiLシステム上で 補正機能適合の チでツールチェーン全体をカバーできるの 同等のバーチャルテストベンチにテストタ 行うエンジン開発の開始から適合のサポー 前(黒色)と後(青色)の で、開発環境の再利用性を最大限に向上さ スクを容易に移行できます。このプロセス トに至るまでの各フェーズで実施されま 高地シミュレーション結果 せます。同時に、以上のすべての特長によ では、半物理的な零次元モデルを中心とす す。これにより、無作為の地理的ロケー ションでは簡単に実行できない適合タスク を容易に採用できるだけでなく、「オフサ イクルエミッション」および「インユース 900 800 250 600 225 500 す。 エンジン保護機能の適合 壊滅的なエンジン障害などの誤作動がエン ジン動作中に発生すると致命的結果に至る 可能性があるので、保護機能のパラメータ 175 適合は非常に重要です。このような場面で 500 150 450 400 350 300 120000 こそ、バーチャルテストベンチが非常に大 きなメリットをもたらしてくれます。実エ ンジンが過負荷による損傷を受けるのを防 ぐだけでなく、適合・検証プロセスも効率 的に実行できます。たとえば、漏電、ラジ エータの詰まり、または空気および排出ガ スの経路に起こる圧力損失を再現するシ 110000 ミュレーションも、エンジンモデル内の関 100000 連パラメータ値を微調整することにより容 90000 易に行えます。 80 80000 75 70 65 60 105 100 95 90 85 80 大気圧(kPa 75 70 65 60 55 標高、高温、および低温に対する補正機能 燃料 [kg/h] ターボチャージャRPM 早期適合フェーズで行えるようになりま 200 タービンの上流の圧力 [kPa] コンプレッサの下流の温度 [°C] 700 タービンの上流の温度 [°C] コンプライアンステスト」に関する調査も 補正なし 補正あり 制限値 の適合 環境条件の相違によりエンジン性能が変動 する可能性があり、内燃機関の排気ガスと 熱力学的な挙動の両方がその影響を受ける 可能性があります。熱力学的な変動は出力 と部品保護に影響を与えるので、その重要 性はどれだけ誇張してもしすぎることはあ りません。さらに、将来の法規制により、 R E A LT I M E S 排気ガス認証、例えば、1,600メートル超 今後の展望 の標高と広い環境温度範囲内での認証とま このように確かな結果が得られたので、他 すます関 係 するようになるでしょう。 の応用例も想定できます。この流れでは、 LABCARでは標高、高温、および低温を 各種運転サイクルの排気ガス予測、排気ガ 補正するための量産レベルの適合を容易に ス後処理モデルの統合、OBD II機能の適 行うことができます。この機能により、コ 合、およびコンポーネントやセンサの許容 スト面で大きなメリットを享受できます。 誤差を調べる耐久性試験などの例が考えら J 2/2012 09 れます。これらのどれを試みる場合も、 は重要な要件が伴います。つまり、コン LABCARの柔軟性とパフォーマンス、およ びAVL社の専門知識が強固な基礎になるこ ポーネントの負荷は過剰になってはいけま とは必至です。 環境圧および環境温度の補正機能の適合に せん。また、排気ガスを法定限度内に抑え なければなりません。さらに、顧客が求め るパフォーマンスを可能な限り徹底的に追 求する必要があります。これらの要件に対 応するために、エンジン制御ユニットの設 定値補正の適合では環境圧と環境温度を考 慮する必要があるので、前述の PUMA/ CAMEO/LABCAR複合システムを導入。 バーチャルテストベンチで行う適合は実車 適合と比較すると、環境条件を迅速に修正 できるだけでなく、一貫性と再現性を同時 に確保できるという点が特に優れていま す。 計測とシミュレーションの結果を比較すると、 これにより、保護機能と補正機能のパラ 両者の値が十分に近くなっていることが分かります。 メータ化を、実エンジンのテストベンチで 実行する基本適合と並行して開始できるよ ターボチャージャRPM うになります。このアプローチとHiLシス テム設定の自動化により、時間とコストを 大幅に削減できます。図2は、高地シミュ レーションを補正機能適合無しと適合済で コンプレッサの下流の温度 タービンの上流の温度 RPM °C (°F) °C (°F) シミュレーション 84981 157 (314.6) 583 (1081.4) 計測 86000 156 (312.8) 562 (1043.6) 偏差[%] -1.2 0.4 3.6 の場合の比較を示しています。補正機能適 合済のシミュレーションでは適用限界値を 超えることは絶対にありません。 検証 プレ適合は、標高2,000メートル超で行っ 課題 た冬季高地試験の中で検証されました。表 オフロード車は数々のバリアントが開発され、多種多様な環境条件下で使用されます。 では、関連する 3つの変数の実測値とシ 考えられるすべてのオプションをカバーする(野外または大規模人工気象室内で行う)適合の ミュレーション値を比較しています。比較 作業には、コストと時間がかかるため、新しいアプローチが求められます。 の結果、シミュレーションでも実測値に非 常に近い値が得られていることが証明され ソリューション たので、これ以上データバージョンを変更 AVL MoBEOなどのようなモデルベースの適合メソッドを使用すると、絞り込んだ機能について、 LABCARを使用して信頼できる適合を行えます。 する必要はなくなりました。ここでは動作 ポイントが図2のものと同じでないことに 注目してください。 メリット この種の「バーチャルな適合」を使用すると、時間もお金も節約できます。さらに、すべての 種類の環境条件をシミュレートできるので、適合の質が向上します。
© Copyright 2026 Paperzz