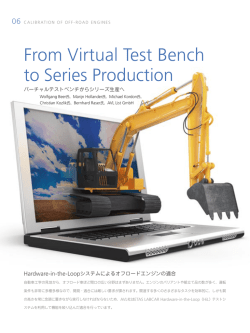
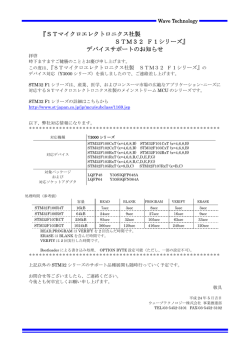
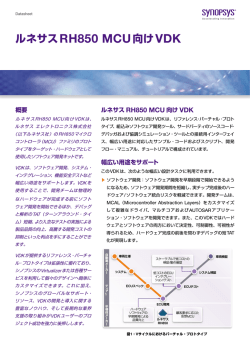
12 B AT T E R Y M A N A G E M E N T T E S T Solid Grip on Power 確かな電源制御 Dirk Martin 氏、AVL Software and Functions GmbH 高電圧バッテリ制御をシミュレーションでテスト 電気駆動システム用の高電圧バッテリ制御は、テストシステムにかなり大きな難題を突きつけます。使用されるモデ ルが非常に複雑で計算負荷が非常に高くなりがちなうえ、高電圧を使用するため高価なハードウェアが必要になり ます。パワートレインエンジニアリングのスペシャリストである AVL 社は、信号レベルのシミュレーションテストと ETAS LABCAR テストシステムを組み合わせ、フレキシブルでパワフルなソリューションを構築しました。 AVL 社は、世界各地にある自社施設で、エ マルチコアの ETAS LABCAR-RTPC なら、 として、バッテリ管理システム(BMS)に ンジン・自動車産業向けにあらゆるタイプ 必要なレベルの性能を提供できます。 より、 BCU 上の高電圧計測と高電圧リレー 制御、さらに分散監視のコンセプトが統合 の駆動システム用のハードウェアとソフト ウェアの開発・改良を行っています。それ 物理構成 されています。BCU には専用の監視 ASIC と同時に、エンジン計測手法とテストシス 公称パック総電圧が 675V という 180 個 が装備されていないので、このタスクは テムの分野のテスト業務に必要なあらゆる のパウチセルが、 12 セルずつ 15 個のバッ バッテリ管理システム内の MCU が引き受 機器とシステムを提供していて、製品や テリモジュールに分けられています(図 けます。この監視のしくみと MCU に処理 サービスの提供は個別の計測デバイスから 2)。各モジュールはモジュール制御ユニッ を分散することには明らかなメリットがあ フル装備のターンキーテスト設備まで広範 ト(MCU)により監視されます。バッテリ ります。つまり、このソリューションは経済 にわたっています。パワートレインの多く 制御ユニット(BCU)は MCU との通信を 的で高性能なうえ、拡張も容易で、それほ の分野に ETAS LABCAR テストシステム 管理し、パック電流値とセル電圧値の計測 ど苦労なくさまざまなバッテリトポロジー を配備し、 内燃エンジン、 トランスミッショ を同期させ、温度やバランシング状態など に適応できます。 、バッテリ、 ン、車両制御ユニット(VCU) その他のパラメータに基づいてその時々の AVL 社が独自に開発した基本ソフトウェ および電気モーターの適切なモデルを適用 バッテリ状態を判定します。その他の機能 アは、ソフトウェアのスケーリングのため しています。これらすべてのセグメントを 組み合わせてシステム全体を容易に構成す ることができます。 高電圧バッテリ制御機能の開発とテスト ラボ環境で行う AVL E-Coupe 用高電圧 バッテリ制 御 機 能 の開 発 とテストには Hardware-in-the-Loop(HiL)システム が利用されています。テスト対象の ECU は記録されたテストベンチ計測値によりス ティミュレートされるか、HiL システム上で 稼働している AVL モデル環境(図 1)に接 続されます。 実車での計測と比較した結果、 AVL モデルの再現性が非常に良いことが 分かりました。 これらのテストのために選択されたハード ウェアは、ETAS の LABCAR テストシス テムでした。要求される計算タスクにはセ ル数の多い非常に複雑なバッテリモデルが 使用されるため、テストシステムは I/O ハードウェアと計算能力に関する厳しい要 求に対応しなければなりません。高性能な R E A LT I M E S ETAS LABCAR K1 U1 バッテリ セルモデル J 1/2013 13 R I1 K2 U2 .. . 高電圧 シミュレーション V, T, Bal 車載CAN シミュレーション プライベートBMS CANバス MCU 0 Simulation BCU 同期/機能的安全性 .. . V, T, Bal AVL社のBMSモデル MCU 1 Simulation .. . ヒューズおよび サービスブレーカ V, T, Bal オプション: 物理MCU MCU 2 Simulation ... .. . V, T, Bal 電流センサシミュレーション MCU 14 Simulation K3 I2 U3 に提供され、実際には高電圧にできない状 きるだけ再利用性の高いフラットなモデル の問題を絶対に起こさないようにするため 図1:HiLシステム上の 況で高電圧テストを信号レベルでシミュ アーキテクチャですが、これは HiL ハード に、バッテリモデルと MCU を含むモデル プロジェクト構成 レートできます。このメリットは明らかで ウェアとモデルがともに容易に拡張できる はそれぞれ個別のコアに厳密に分割されま す。経済的な価格のラボ用ワークステー ものでなければ実現できません。配備され す。他の、処理時間がそれほどかからない ションでバッテリ管理システムの事実上す るアイテムには、たとえば、セル電圧、充 モデルは全部で 1 つのコアを共用します。 べての機能の開発・テストを、担当者や装 、電流などすべての主要セ 電状態(SOC) この構成は有効性が実証されています。別 置の安全を脅かすことなく行えます。仮想 ルデータを計算するためのバッテリセルモ の方法としては、たとえば、監視機能とタ の高電圧は LABCAR システムの ES1335 デルや、 熱モデル、 各種のセンサやアクチュ イミング機能を包括的にテストするため 任意信号生成ボードにより供給されます。 エータのモデル、さらに充 電 インター に、実際のモジュールコントローラとシ このボードは電気的に絶縁されているの フェースをシミュレートするためのモデル ミュレートされたモジュールコントローラ で、仮想の高電圧シミュレーションにとっ などがあります。また、MCU の挙動・初 を一緒に使用して HiL システム上で融合し ては理想的です。ES1385 抵抗エミュレー 期化や分散監視もモデルにマッピングされ た運用を行うことも可能です。 ションボードと一緒に使用すれば、 BCU の ます。CAN レジデュアルバスシミュレー 絶縁監視機能の有効性もテストできます。 ションでは、 BCU と MCU の間の内部 テストの運用 バッテリ管理 CAN だけでなく、車両制御 モデル ユニット(VCU)のシミュレーションおよ HiL システムは Simulink®モデルまたは C び AVL PI800 パワーエレクトロニクスと BCU 機能のテストと起動には、2 種類の シミュレータ構成を使用できます。第 1 の 構成では、 BCU だけが LABCAR システム コードモジュールの形で実装されている複 の車両インターフェースもカバーします。 上で稼動され、残りのすべてのコンポーネ 数のモデルを統合するためのホストになり 各モデルの計算は RTPC のいくつかのプロ ントは HiL システムによりシミュレートさ ます。目標として想定されているのは、で セッサコア上で実行されます。実行時間上 れます。この比較的シンプルな構成は非常 14 B AT T E R Y M A N A G E M E N T T E S T 冷却水ライン セル制御 電気的接続 バッテリパックの詳細情報 公称セル電圧 3,75V セル容量 41Ah 構成 180s1p セル数 180 公称パック電圧 675V 搭載されているパックの エネルギー容量 27,6kWh パック重量 242kg パックの重量エネルギー密度 114Wh/kg 液体冷却 バッテリパック バッテリ制御 ユニット(BCU) 図2: にフレキシブルに配備でき、多数のケース バッテリセルまたはエミュレートされた AVL E-Coupe用 をテストできます。 バッテリセルに接続する必要がありませ バッテリパック 第 2 の構成では、BCU だけでなく 1 個の ん。不適切なセル電圧(~0V)および温度 実 MCU もシミュレータ上で稼動します の値が実 MCU により CAN 経由で BCU 。第 1 の構成と同様に、残りの 14 (図 1) に送られる場合には、 LABCAR システムの 個のモジュールコントローラとパワーエレ ゲートウェイ機能が使用されて有効なモデ クトロニクスは HiL システムに仮想的に ル値で上書きされます。このように、高電 マッピングされます。この構成では、BCU 圧を使用しなくてもシステム全体の操作を と協調する実 MCU の、特にタイミング機 実現できることがわかります。 能および監視機能の通信をテストできま す。これらのテストでは、MCU を実際の 多目的な配備 このテストシステムは、日中は機能開発者 が行うマニュアルテストに使用され、夜間 と週末は自動の耐久試験用に確保されてい 課題 ます。このように、システムの能力をフル バッテリ制御モジュール機能のテストと起動は、動作電 に活用して、非常に多様な運転サイクルの 圧が高いため、かなりの費用がかかります。 できるだけ多くの自動機能テストと、でき るだけ長距離の仮想テストをこなすことが ソリューション できます。この HiL 構成で、障害発生時や 強力なLABCARマルチコアHiLシステムとAVL社のモ 境界条件のケースのシステム挙動の開発と ジュール型モデルを使用することにより、高電圧テスト テストも行うことができます。 LABCAR の を信号レベルで、つまり実際に高電圧を使用しないでシ 信頼性なくして、この品質の開発作業をこ ミュレートできます。 の早さで行うことはできません。また、こ のシステムはオープンなので、将来の課題 メリット 経済的な価格のラボ用ワークステーションにより、担当 者や機器の安全を脅かすことなく、バッテリ管理システ ムのほぼすべての機能の開発とテストを行うことができ ます。組織的なスケジューリングにより、週7日、24時 間という効率的な稼働を実現できます。 への備えとしても理想的です。
© Copyright 2026 Paperzz