超音波の基礎
機能材料工学科
1
阿部
洋
目次
1.
音響振動と音場
§1.1 音圧
§1.2 速度ポテンシャル
§1.3 音響インピーダンス
§1.4 超音波の反射と透過
2. 液浸法(パルス超音波透過)
§2.1 超音波吸収
§2.2 減衰定数
§2.3 音速測定
§2.4 測定例
3. 横波反射法を用いたずりインピーダンス測定
§3.1 弾性
§3.2 粘性
§3.3 粘弾性
§3.4 音波の緩和現象
付録
2
1. 音響振動と音場
§1.1 音圧
x3
δV=δx1δx2δx3:
微小体積
ρδx1δx2δx3:
微小体積の質量
u1, u2, u3:
x1, x2, x3方向の変位
u3 +δu3
u1
u2
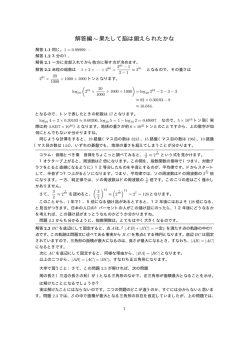
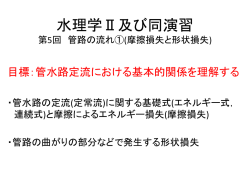
x1方向の音圧pによって受ける力は図 1・1 のよう
に
u2 +δu2
u1 +δu1
u3
F1 = pδx 2 δx 3
F1 +
δF1 ⎛
∂p ⎞
⎟δx 2 δx 3
= ⎜⎜ p +
δx 1 ⎝
∂x 1 ⎟⎠
δF1 =
x2
x1
∂p
δx 1δx 2 δx 3
∂x 1
となる。
図
1・1 音場におかれた微小六面体の変位
微小体積は音圧の逆方向に反作用するので、
− δF1 = −
−
∂p
δx 1δx 2 δx 3 = ρδx 1δx 2 δx 3 &u&1
∂x 1
∂p
= ρ&u&1
∂x 1
,
−
∂p
= ρ&u& 2
∂x 2
,
−
∂p
= ρ&u& 3
∂x 3
(1・1)
体積変化δV は、
⎛ ∂u
⎛ ∂u ⎞⎛ ∂u ⎞⎛ ∂u ⎞
∂u ⎞
∂u
V + δV = V⎜⎜1 + 1 ⎟⎟⎜⎜1 + 2 ⎟⎟⎜⎜1 + 3 ⎟⎟ ≈ V⎜⎜1 + 1 + 2 + 3 ⎟⎟
⎝ ∂x 1 ⎠⎝ ∂x 2 ⎠⎝ ∂x 3 ⎠
⎝ ∂x 1 ∂x 2 ∂x 3 ⎠
⎛ ∂u
∂u ⎞
∂u
δV ≈ V⎜⎜ 1 + 2 + 3 ⎟⎟
⎝ ∂x 1 ∂x 2 ∂x 3 ⎠
となるので、
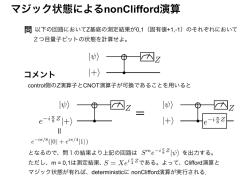
『体積弾性率』を K とすると、 δp = − K
δV<0
δV
の
V
関係(図 1・2)から、
⎛ ∂u
∂u ⎞
∂u
δp = −K⎜⎜ 1 + 2 + 3 ⎟⎟
⎝ ∂x 1 ∂x 2 ∂x 3 ⎠
(1・2)
が求められる。
図 1・2 体積弾性率
3
§1.2 速度ポテンシャル
電磁気学の電位(電気ポテンシャル)と電場の関係と同様に、変位速度は『速度ポテンシャル』を用いて表現で
きる。速度ポテンシャルφの定義は、
u& 1 =
∂u 1
∂φ
≡−
∂x 1
∂t
u& 2 ≡ −
,
∂φ
∂x 2
,
u& 3 ≡ −
(1・1)式と(1・3)式を時間で偏微分した &u&1 = −
−
∂p
∂ 2φ
= ρ&u&1 = −ρ
∂x 1
∂x 1∂t
p = ρφ& + C
∂φ
∂x 3
(1・3)
∂ 2φ
より、
∂t∂x 1
となり、x1で積分すると、
(C は積分定数)
(1・4)
C を大気圧とすると、超音波による圧力変化はδp= ρφ& となる。
(1・2)式を時間で微分して、(1・3)式を位置で偏微分した
δp& =
⎛ ∂ 2φ
⎛ ∂u& 1 ∂u& 2 ∂u& 3 ⎞
∂ (δp)
∂ 2φ
∂ 2φ
⎜
⎜
⎟
= −K⎜
+
+
⎟ = K ⎜ ∂x 2 + ∂x 2 + ∂x 2
∂t
⎝ ∂x 1 ∂x 2 ∂x 3 ⎠
2
3
⎝ 1
∂u& 1
∂ 2φ
を代入すると、
≡−
2
∂x 1
∂x 1
⎞
⎟ = K∆φ
⎟
⎠
(1・5)
(1・4)式と(1・5)式より、p を消去すると、 ρ&φ& = K∆φ となり、
∆φ −
ρ &&
φ=0
K
(1・6)
φ* = φ 0 e iωt とすると、(1・6)式は、
⎛
2 ρ ⎞
2
⎜∆ + ω
⎟φ* = ∆ + k φ* = 0
K⎠
⎝
(
)
⎛ d2
⎞
2
⎟φ* = 0
x1方向に伝播する平面は、 ⎜
+
k
⎜ dx 2
⎟
⎝ 1
⎠
(1・7)
となるので、この方程式の一般解は、
φ* = ξ + e i (ωt − kx1 ) + ξ − e i (ωt + kx1 )
(1・8)
ξ+, ξ- は、正方向、負方向に伝播する波の振幅を表す。kは波数ベクトル。
4
§1.3 音響インピーダンス
音波の伝播速度cは、正方向(x1方向)に伝播する波を考えると、
c=
ω
=
k
K
ρ
(1・9)
(1・4)式の p = ρφ& + C
(1・3)式の u& 1 ≡ −
∂φ
∂x 1
から、
から、
p = ξ + iωρ e i (ωt − kx1 )
(1・10)
u& 1 = ξ + ike i (ωt − kx1 )
(1・11)
電磁気学のインピーダンス(抵抗)と同様に『音響インピーダンス』zを定義する。
z≡
p ωρ
=
= ρc
u& 1
k
(1・12)
電気回路(交流)で、電流・電圧の波が伝わる場合に(電圧/電流)の比を特性インピーダンスと呼ぶので、
平面音波の伝播に対しても同じように、(音圧 / 変位速度)の比を『固有音響インピーダンス』と呼ぶ。
外場
応答
インピーダンス
電磁気学
電圧
電流
R=V/I
音響学
音圧
変位速度
z=p/v
平面音波が減衰すると変位 u は、
u = u 0 e − αx e i (ωt − kx ) = u 0 e − αx e iω(t − x / c ) = u 0 e iω( t − x / c +iαx / ω ) = u 0 e iω( t − x / c*)
(1・13)
『減衰定数』をα[dB/cm]とすると、減衰のある音波の音速度は複素音速度 c*で表される。超音波周波数による音速
の分散が見られる。
1 1 α
= −i
c* c ω
,
k* =
ω
− iα
c
(1・14)
5
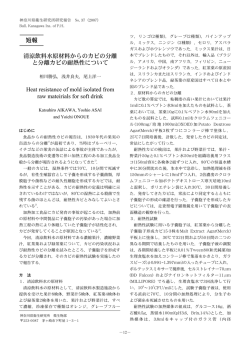
§1.4 超音波の反射と透過
図 1・3 のように異なる媒体 1 と媒体 2 として、
媒体1
平面波の入射 (Incident)、反射 (Reflection)、透過
媒体2
z1 =ρc
1 1
(Transmission)を考える。
z2 =ρc
2 2
境界条件は、境界(x1=0)の両側で粒子速度が等
しい、境界の両側で音圧が等しい、ということであ
入射波
る。
(1・3)式より、粒子速度は、u& ≡ −
{
∂φ
となるので、
∂x
u& 1 = u& i + u& r = −ik 1 − ξ1+ e i (ωt − k1x ) + ξ1− e i (ωt + k1x )
}
i
透過波
pi
ui
u& 2 = u& t = ik 2 ξ 2+ e i (ωt − k 2 x )
t
ut
x=0
1
pt
x1
反射波
x1=0 のとき、 u& 1 = u& 2 となるので、
k 1 {ξ1+ − ξ1− } = k 2 ξ 2+
(1・15)
(1・4)式より、音圧 p = ρφ& + C
{
p1 = p i + p r = iωρ1 ξ1+ e
i (ωt − k1x )
となるので、
+ ξ1− e
i (ωt + k1x )
r
ur pr
図 1・3 異媒質境界面への垂直入射
}
p 2 = p t = iωρ 2 ξ 2+ e i (ωt − k 2 x )
x1=0 のとき、p1=p2 となるので、
ρ1 {ξ1+ + ξ1− } = ρ 2 ξ 2+
(1・16)
(1・15)式を(1・16)式で割ると、
k 1 ξ1+ − ξ1− k 2
⋅
=
ρ1 ξ1+ + ξ1− ρ 2
,
ω
ω ξ1+ − ξ1−
⋅
=
ρ1c1 ξ1+ + ξ1− ρ 2 c 2
,
z 2 (ξ1+ − ξ1− ) = z1 (ξ1+ + ξ1− )
反射率 R は、
R=
ξ1− z 2 − z1
=
ξ1+ z1 + z 2
(1・15)式から ξ1− = ξ1+ −
(1・17)
k2
ξ 2+
k1
となり、(1・16)式に代入すると、
⎛ k
⎞
2ρ1ξ1+ = ξ 2+ ⎜⎜ ρ1 2 + ρ 2 ⎟⎟
⎝ k1
⎠
k1=ω/c1, k2=ω/c2 なので、透過率Tは、
T=
ξ 2+
2ρ1c 2
=
ξ1+ ρ1c1 + ρ 2 c 2
(1・18)
6
電気回路でのインピーダンスと音響インピーダンスの対応で、
(電圧 Æ 音圧),
(電流 Æ 変位速度)
となるので電気エネルギー P = IV から、単位時間に単位面積を通過する『エネルギー音響密度』は、
u& p
となる。
超音波強度のRIは、(1・10)式、(1・11)式を考慮すると、
p i = iωρ1ξ1+ e i (ωt − k1x ) ,
p r = iωρ1ξ1− e i (ωt + k1x ) ,
p t = iωρ 2 ξ 2 + e i (ωt − k 2 x )
u& i = ik 1ξ1+ e i (ωt − k1x ) ,
u& r = −ik 1ξ1− e i (ωt + k1x ) ,
u& t = ik 2 ξ 2 + e i (ωt − k 2 x )
が求められる。
(1・17)式を用いて、
p r ξ1−
z − z1
=
=R= 2
,
p i ξ1+
z1 + z 2
u& r
ξ
z − z2
= − 1− = −R = 1
u& i
ξ1+
z1 + z 2
従って、音響エネルギーの反射率RI(>0)は、
⎛ z − z2
u& p
R I = r r = ⎜⎜ 1
u& i p i ⎝ z 1 + z 2
⎞
⎟⎟
⎠
2
(1・19)
同様に(1・18)を用いて、
p t ρ 2 ξ 2+ ρ 2
2ρ 2 c 2
=
=
T=
p i ρ1ξ1+
ρ1
z1 + z 2
u& t k 2 ξ 2+ c1ξ 2+ c1
2ρ1c1
=
=
= T=
u& i
k 1ξ1+ c 2 ξ1+ c 2
z1 + z 2
従って、音響エネルギーの透過率TIは、
TI =
u& t p t
4z 1 z 2
=
u& i p i (z 1 + z 2 )2
(1・20)
7
2. 液浸法(パルス超音波透過)
§2.1 超音波吸収
強度損失を表すデシベル[dB]は、入射強度と透過強度の比の常用対数を 10 倍したものである。
損失 L0 [dB] は、
L 0 = 10 ⋅ log10
ξ
Ii
= 20 ⋅ log10 i
ξt
It
(2・1)
L0には、界面での反射による損失 Lr も含まれている。試料の吸収が大きく、試料中の多重反射の影響が無視でき
るときは、(1・19)式より
L r = −10 ⋅ log 10 {1 − R I } = 10 ⋅ log10
(z 1 + z 2 )2
4z 1 z 2
液体の密度ρ0, 液体の音速 c, 試料の密度ρ, 試料の音速 v として、 r12 =
L r = 10 ⋅ log10
ρv
を用いると、
ρ0c
(1 + r12 )2
(2・2)
4r1 2
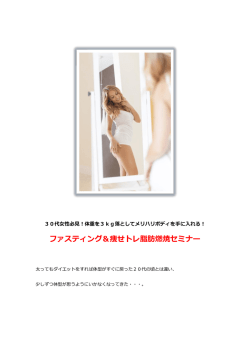
図 2.1 のように、液浸法では 2 回反射が起きるので、
L = L 0 − 2L r = 20 ⋅ log10
(1 + r12 )
ξi
− 20 ⋅ log10
ξt
4r12
Sample
2
(2・3)
試料の厚さを d [cm] として 1cmあたりの減衰 L [dB/cm]は、
L=
L
d
(2・4)
図 2.1 超音波の反射
となる。
§2.2 減衰定数
(1・14)式から、『減衰定数』α[dB/cm]が導出されたが、実験では(2・3)式の超音波吸収のデータを用いて
計算することができる。d [cm] 進んだときのエネルギー損失 L は、
L = 20 ⋅ log10
e − αx
e −α ( x + d )
= 20αd ⋅ log10 e = 8.686 ⋅ αd
となるので、
(2・4)式を用いて、
L = 8.686 ⋅ α
(2・5)
減衰定数α[neper/cm] が実験的に求められる。
8
§2.3 音速測定
音速は、図 2・2 のように試料があるときと試料がないときの測定により求められる。
試料がないときの時間: t 1 =
L
c
試料があるときの時間: t 2 =
L−d d
+
c
v
Δt=t2−t1
(2・4)
c
L
d d
⎛ 1 1⎞
= − + = d⎜ − ⎟
c v
⎝v c⎠
1 ∆t 1 c∆t + d
=
+ =
cd
v d c
v=
cd
c∆t + d
d
(2・5)
c
v
L
図 2・2
液浸法による音速測定
§2.4 測定例
9
3. 横波反射法を用いたずりインピーダンス測定
§3.1 弾性
図 3・1 の応力(σ)-ひずみ(ε)曲線に見られるように、『降伏点』
降伏点
を超えないとき、除荷するとひずみが 0 に戻る。これを『弾性変形』
という。これに対して、降伏点を越えて除荷し、ひずみが残る変形
弾性理論から(付録を参照)等方弾性体では体積弾性率 K は『ラ
ーメ定数 』(λ, μ) を用いて、
2
K =λ+ µ
3
σ
を『塑性変形』と呼ぶ。
(3・1)
とあらわせる。また、μは、『ずり弾性率』G(shear modulus)、『剛
ε
性率』G(rigidity) とも呼ばれ、μ=Gとなる。縦波(longitudinal)
の音速 cl と横波(transverse)の音速 ct は、体積弾性率Kと剛性率
Gを用いて、
1⎛
4G ⎞
⎟
⎜K +
3 ⎠
ρ⎝
ct =
G
ρ
(3・2)
(3・3)
τ
cl =
図 3・1 応力(σ)-ひずみ(ε)曲線
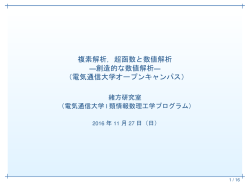
§3.2 粘性
ビ ン ガ ム流 体
液体に『ずり応力(せん断応力)』(shear
stress)τ(=σ12)を作用すると図 3.2 のよ
12
ニ ュートン 流 体
∂v ⎞
1 ⎛ ∂v
τ = σ12 = 2ηs ⋅ ⎜⎜ 1 + 2 ⎟⎟
2 ⎝ ∂x 2 ∂x 1 ⎠
(3・4)
x
2
v3) とする。
擬塑性流体
σ
うに速度勾配が生じる。流速v=(v1, v2,
x
1
ダ イラ タ ン ト流 体
du/dx
図3・2 せん断応力と応力-速度勾配曲線
但し、ηsは『ずり粘性係数』(shear viscosity coefficient)、あるいは流体の『第1粘性』と呼ぶ。ηが速度勾配に無関
係のとき、『ニュートン流体』(Newtonian fluid) という。これに対してηが速度勾配に依存する流体を『非ニュー
トン流体』(Non-newtonian fluid)という。
10
せん断応力σij (i≠j) を考えたが、外圧による体積変化に対しても粘性抵抗を示す。体積変化がある時間で平衡状
態になる場合である。また、法線応力σii は等方弾性体ではスカラーとなり、体積ひずみ速度 ∇ ⋅ v = div ( v ) もスカ
ラーになる。膨張する方向を正とすると、
∂v ⎞
1 ⎛ ∂v
σ11 = −p + η' (∇ ⋅ v ) + 2ηs ⋅ ⎜⎜ 1 + 1 ⎟⎟
2 ⎝ ∂x 1 ∂x 1 ⎠
∂v ⎞
1 ⎛ ∂v
σ 22 = −p + η' (∇ ⋅ v ) + 2ηs ⋅ ⎜⎜ 2 + 2 ⎟⎟
2 ⎝ ∂x 2 ∂x 2 ⎠
∂v ⎞
1 ⎛ ∂v
σ 33 = −p + η' (∇ ⋅ v ) + 2ηs ⋅ ⎜⎜ 3 + 3 ⎟⎟
2 ⎝ ∂x 3 ∂x 3 ⎠
となる(η’ は『第2粘性』でラーメ定数のλに相当し、ηsはμに相当する)。σii = σ11 + σ22 + σ33 を考慮して、
これらの3式を足すと、
−
σ ii
= p − η v (∇ ⋅ v )
3
(3・5)
2
η v = η'+ ηs
3
(3・6)
となる。但し、ηv は、『体積粘性率』(volume viscosity, bulk viscosity) と呼ばれる。
§3.3 粘弾性
等方弾性体としてx1-x2平面で考えると(10・13)式の運動方程式(縦波)は、 ρ
最初に弾性の寄与を考える。また、
(10・12)式のσ11 を x1 で偏微分して、
∂ 2 u 1 ∂σ11 ∂σ12
=
+
∂x 1
∂x 2
∂t 2
となる。
(10・16)式を考慮すると、
∂σ11
∂ε
∂ 2 u1 ⎛
4 ⎞ ∂ 2 u1
G⎟
K
= (λ + 2µ ) 11 = (λ + 2µ )
=
+
⎜
2
3 ⎠ ∂x 1 2
∂x 1
∂x 1
∂x 1
⎝
となる。次に粘性の寄与を考慮する。
ρ
2
2
⎞
⎛ 2
∂v1 ∂σ11 ∂σ12
∂
(∇ ⋅ v ) + 2ηs ∂ v21 + ηs ⎜⎜ ∂ v21 + ∂ v 2 ⎟⎟
= η'
+
=
∂x 1∂x 2 ⎠
∂x 2
∂x 1
∂x 1
∂t
∂x 1
⎝ ∂x 2
x1方向を考え、(3・6)式の関係を使うと、
ρ
∂ 2 v1 ⎛
∂ 2 v1
∂ 2 v1
∂v1
4 ⎞ ∂ 3u1
(
)
'
2
=
η
+
ηs ⎟
=
η
+
η
+ 2η s
= η'
⎜
s
v
2
2
3 ⎠ ∂t∂x 1 2
∂x 1
∂t
∂x 1
∂x 1
⎝
弾性と粘性を考慮すると、縦波の運動方程式は、
ρ
∂ 2 u1 ⎛
4 ⎞ ∂ 2 u1 ⎛
4 ⎞ ∂ 3u1
=
+
+
η
+
ηs ⎟
K
G
⎜
⎟
⎜ v
3 ⎠ ∂x 1 2 ⎝
3 ⎠ ∂t∂x 1 2
∂t 2
⎝
(3・7)
となる。
11
弾性率 M
K+
縦波
粘性係数 η
4
G
3
ηv +
G
横波
4
ηs
3
ηs
複素縦波弾性率 M* ( = M’ + i M” ) を導入して、複素体積弾性率K* = K’ + i K”, 複素剛性率G* = G’ + i G” は次の
ような関係がある。
4 *
G
3
M* = K* +
(3・8)
(3・7)式は、
ρ
∂ 2 u1
∂ 2 u1
∂ 3u1
=
M
'
+
η
2
2
∂t 2
∂x 1
∂t∂x 1
となる。一般に波動方程式は、 u = Ae i (kx −ωt ) とすると、
1 ∂ 2u
1 ∂ 2u
=
ω 2 ∂t 2 k 2 ∂x 2
が成り立つので、
2
∂ 2 u1
∂ 2 u1
* ∂ u1
=M
ρ 2 = (M '+iωη)
2
2
∂t
∂x 1
∂x 1
M* = M’ + iM” = M’ + iωη
(3・9)
k*c* = ωから、ρ(c*)2 = M* となる。
1 ∂ 2u ∂ 2u
= 2
2
2
∂x
c * ∂t
(c )
* 2
( )
(1・14)式から、
=
M*
ρ
(3・10)
1 1 α ω − iα c
となり、
= −i =
ω
cω
c* c
αc
cω(ω + iαc )
ω
=c
c* = c'+ic" = 2
2 2
2
ω +α c
⎛ αc ⎞
1+ ⎜ ⎟
⎝ ω⎠
1+ i
c' =
c
⎛ αc ⎞
1+ ⎜ ⎟
⎝ ω⎠
( )
M* = ρ c *
2
2
,
c" =
αc 2
⋅
ω
1
⎛ αc ⎞
1+ ⎜ ⎟
⎝ ω⎠
2
⎡
⎤
2
αc
⎢ 1 − ⎛ αc ⎞
⎥
⎜ ⎟
2
⎢
⎥
⎝ ω⎠
ω
+
= ρc 2 ⎢
i
2
2 ⎥
⎧⎪ ⎛ αc ⎞ 2 ⎫⎪ ⎥
⎢ ⎧⎪ ⎛ αc ⎞ 2 ⎫⎪
⎢ ⎨1 + ⎜ ⎟ ⎬
⎨1 + ⎜ ⎟ ⎬ ⎥
⎪⎩ ⎝ ω ⎠ ⎪⎭ ⎦⎥
⎣⎢ ⎪⎩ ⎝ ω ⎠ ⎪⎭
12
(3・11)
(3・12)
§3.4 音波の緩和現象
ずり応力に関する緩和時間を求めるために、反射法を用いて音響インピーダンスを測定する。『複素ずり速度』を
cs* とする。
cs* = cs’ + i cs”
(3・13)
横波では、
ρ
2
∂2u
∂ 2u
∂3u
∂ 2u
* ∂ u
(
)
=
+
η
=
+
ωη
G
=
G
i
G
s
s
∂t 2
∂x 2
∂t∂x 2
∂x 2
∂x 2
ρ(c*)2 = G* と(3・12)式から、
G ' = ρc 2
⎛ αc ⎞
1− ⎜ ⎟
⎝ ω⎠
⎧⎪ ⎛ αc ⎞
⎨1 + ⎜ ⎟
⎪⎩ ⎝ ω ⎠
2
2
⎫⎪
⎬
⎪⎭
G" = ρc 2
2
2
αc
ω
⎧⎪ ⎛ αc ⎞ 2 ⎫⎪
⎨1 + ⎜ ⎟ ⎬
⎪⎩ ⎝ ω ⎠ ⎪⎭
2
(3・14)
αc
G"
2αcω
ω
=
= 2
2
G'
ω − α 2c2
⎛ αc ⎞
1− ⎜ ⎟
⎝ ω⎠
2
4(αcω)
⎛ G" ⎞
1+ ⎜ ⎟ = 1+
⎝ G' ⎠
ω2 − α 2 c 2
2
2
(
)
2
=
2
(ω
(ω
2
2
+ α 2c2
− α 2c2
2ω
⎛ G" ⎞
=
1+ 1+ ⎜ ⎟ = 2
ω − α 2c2
⎝ G' ⎠
)
)
2
2
2
ω2 + α 2 c 2
⎛ G" ⎞
1+ ⎜ ⎟ = 2
ω − α 2c2
⎝ G' ⎠
2
⇒
2
⎛ αc ⎞
1− ⎜ ⎟
⎝ ω⎠
2
(3・15)
c
⎛ αc ⎞
⎟ = となる。これを(3・14)式に代入すると、
c'
⎝ ω⎠
2
(3・11)式から、 1 + ⎜
⎛ αc ⎞
1− ⎜ ⎟
⎧ ⎛ αc ⎞ 2 ⎫⎪
ω⎠
2⎪
⎝
2
= ρ(c') ⎨1 − ⎜ ⎟ ⎬
G ' = ρc
2
⎪⎩ ⎝ ω ⎠ ⎪⎭
⎧c⎫
⎨ ⎬
⎩ c' ⎭
2
(3・16)
(3・15)式と(3・16)式から、
ρ(c s ')
2
ρ(c s ")
2
2
G ' ⎧⎪
⎛ G" ⎞ ⎫⎪
= ⎨1 + 1 + ⎜ ⎟ ⎬
2 ⎪
⎝ G ' ⎠ ⎪⎭
⎩
(3・17)
2
⎫⎪
G ' ⎧⎪
⎛ G" ⎞
= ⎨ 1 + ⎜ ⎟ − 1⎬
2 ⎪
⎝ G' ⎠
⎪⎭
⎩
(3・18)
13
(1・17)式より、反射率Rを水晶 (quarts) 振動子、液体 (liquid) 試料の音響インピーダンスを zq, zL とすると、
zL = ρcs*
R=
zL =
zq − zL
zL + zq
1− R
zq
1+ R
1
− ln R
2
1
ln R
2
⎡ 1 log10 R ⎤
1− R 1− R R
1/ R − R e
−e
⎡1
⎤
=
× −1 / 2 =
= 1
= − tanh ⎢ ln R ⎥ = − tanh ⎢
⎥
1
ln R
− ln R
1+ R 1+ R R
1/ R + R
⎣2
⎦
⎣ 2 log10 e ⎦
e 2 + e2
−1 / 2
試料を入れたときと入れないときで、1エコー当たりの吸収の差を Dω(T) とすると、
D ω (T ) = 20 log10 R
⎡ D (T ) ⎤
2
2
z L = z q tanh 2 ⎢ ω
⎥
⎣ 40 log10 e ⎦
ρ(c s ') =
2
⎡ D (T ) ⎤
tanh 2 ⎢ ω
⎥
ρ
⎣ 40 log10 e ⎦
zq
2
ここで、(3・17)式と比べて、G’に関する情報が得られる。
Litovitz の横波反射法により、ずりインピーダンスの測定法を説明する。直径 2cm、長さ 2cmの AC カットの
水晶棒に高周波パルスを印加すると、AC 軸方向に横波が発生して多重反射によるエコーを観測する。
ACカット
Zq=8.78×105 g/cm2・sec
BCカット
Zq=1.27×106 g/cm2・sec
14
付録 A 弾性論
x3
通常、図 A・1 のように、位置xによって変位は異なるので、変形勾配を(10・
1)式とすると、ひずみε(strain)と回転ω(rotation)は、
u i, j ≡
∂u i
∂x j
(10・1)
1
ε ij ≡ (u i , j + u j,i )
2
ωij ≡
x+u
x2
(10・2)
1
(u i, j − u j,i )
2
(10・3) x1
となる。また、σij をxj 方向に垂直な面に作用するxi 方向の応力(図A・2)と
図A・1
すると、対称性から
22
σij = σji
(10・4)
εij = εji
(10・5)
12
21
2
となる。フックの法則 F=kx 、弾性定数 (elastic constant) Cijkl を考慮すると
3
u
x
11
1
3
σij = ∑∑ Cijkl ε kl ≡Cijkl ε kl
(10・6)
k =1 l =1
となる。(10・4)式と(10・5)式の対称性から、Cijkl=Cjikl, Cijkl=Cijlk, の対称性を
図A・2
持っている。また、添え字を次のように置き換えると、σ1は次のようになる。
11→1,
22→2,
33→3
23→4,
31→5,
12→6
σ1 = C11 ε1+ C12 ε2+ C13 ε3+ C14 ε4+ C15 ε5+ C16 ε6
さらに、fcc(面心立方)やbcc(対心立方)などの立方晶系は3個の独立な弾性定数(C11, C12, C44)で表される。(10・6)式は、
⎡ σ1 ⎤ ⎡C11 C12
⎢σ ⎥ ⎢
C11
⎢ 2⎥ ⎢
⎢σ3 ⎥ ⎢
⎢ ⎥=⎢
⎢σ 4 ⎥ ⎢
⎢σ5 ⎥ ⎢
⎢ ⎥ ⎢
⎢⎣σ 6 ⎥⎦ ⎢⎣
C12
C12
C11
C 44
C 44
⎤ ⎡ ε1 ⎤
⎥ ⎢ε ⎥
⎥⎢ 2 ⎥
⎥ ⎢ε 3 ⎥
⎥⎢ ⎥
⎥ ⎢ε 4 ⎥
⎥ ⎢ε 5 ⎥
⎥⎢ ⎥
C 44 ⎥⎦ ⎢⎣ε 6 ⎥⎦
(10・7)
となる。(詳しくはキッテルの「固体物理入門」に書いてあります。)単位体積当たりの弾性エネルギーUは、
σi =
∂U
∂ε i
(10・8)
という関係があるので、
U=
(
)
(
1
2
2
2
2
2
2
C11 ε1 + ε 2 + ε 3 + C12 (ε1ε 2 + ε 2 ε 3 + ε 3 ε1 ) + C 44 ε 4 + ε 5 + ε 6
2
15
)
(10・9)
C 44 =
C11 − C12
2
のときに弾性等方体になるので、ラーメ定数 (Lame’s constant) λ =C12 , μ =C44 とすると、
(10・10)
C11=2μ+λ
となる。(10・9)式は、ラーメ定数で表すと、
U=
(
λ
(ε1 + ε 2 + ε 3 )2 + µ ε1 2 + ε 2 2 + ε 3 2 + ε 4 2 + ε 5 2 + ε 6 2
2
)
(10・11)
弾性等方体では(10・7)式は、
λ
λ
⎡ σ1 ⎤ ⎡λ + 2µ
⎤ ⎡ ε1 ⎤
⎢σ ⎥ ⎢ λ
⎥ ⎢ε ⎥
λ + 2µ
λ
⎢ 2⎥ ⎢
⎥⎢ 2 ⎥
⎢σ3 ⎥ ⎢ λ
⎥ ⎢ε 3 ⎥
λ
λ + 2µ
⎢ ⎥=⎢
⎥⎢ ⎥
2µ
⎢σ 4 ⎥ ⎢
⎥ ⎢ε 4 ⎥
⎢σ5 ⎥ ⎢
⎥ ⎢ε 5 ⎥
2µ
⎢ ⎥ ⎢
⎥⎢ ⎥
2µ⎥⎦ ⎢⎣ε 6 ⎥⎦
⎢⎣σ 6 ⎥⎦ ⎢⎣
(10・12)
となる。弾性等方体ではσ=σ11=σ22=σ33 , ε11 =ε22=ε33 となるので、(1・2)式と(10・12)式は、
σ = K (ε 11 + ε 22 + ε 33 ) = 3Kε 11
σ = (λ + 2µ )ε11 + λε 22 + λε 33 = (3λ + 2µ )ε11
と変形でき、この2式からσ消去すると
K=
3λ + 2µ
3
(3・1)
となり、(3・1)式が証明された。
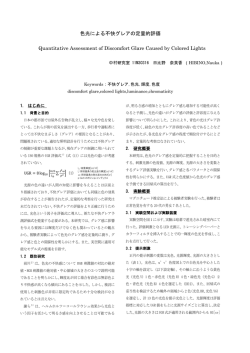
次に、変位uに対する運動方程式を考える。図A・3 のようにx1方向に
x3
働く応力変化は、
∂σ11 σ11 (x 1 + δx 1 ) − σ11 (x 1 ) δσ11
≅
=
∂x 1
δx 1
δx 1
σ1 3
となるので、両辺にδx2・δx3をかけて、
δσ11 ⋅ δx 2 δx 3 =
σ1 1
∂σ11
δx 1 ⋅ δx 2 δx 3
∂x 1
x2
同様に、
x1
∂σ
δσ12 ⋅ δx 1δx 3 = 12 δx 2 ⋅ δx 1δx 3
∂x 2
図A・3
δσ13 ⋅ δx 1δx 2 =
σ1 2
∂σ13
δx 3 ⋅ δx 1δx 2
∂x 3
x1方向の力F1はこれらの和になるので
16
⎛ ∂σ11 ∂σ12 ∂σ13 ⎞
∂ 2 u1
⎜
⎟
+
+
F1 = ⎜
δx 1δx 2 δx 3 = ρδx 1δx 2 δx 3
∂x 2
∂x 3 ⎟⎠
∂t 2
⎝ ∂x 1
結局、運動方程式は、
∂ 2 u1 ∂σ11 ∂σ12 ∂σ13
ρ 2 =
+
+
∂t
∂x1 ∂x 2 ∂x 3
(10・13)
弾性等方体なので、x1x2平面で考える。(10・12)式から、
σ11 = (λ + 2µ )ε11 + λε 22 + λε 33 、
σ12 = 2µε12
となり、それぞれx1、x2で偏微分すると、
∂σ11
∂ 2 u1
= (λ + 2µ )
2
∂x 1
∂x 1
∂σ12
1 ∂
= 2µ
∂x 2
2 ∂x 2
⎛ ∂2u 2
⎛ ∂u 2 ∂u 1 ⎞
∂ 2 u1 ⎞
⎟
⎟⎟ = µ⎜
⎜⎜
+
+
2 ⎟
⎜ ∂x ∂x
∂
∂
x
x
∂
x
2 ⎠
⎝ 1
2 ⎠
⎝ 1 2
が求まる。これらを(10・13)式に代入すると、
⎛ ∂ 2u 2
∂ 2 u1 ⎞
∂ 2 u1
∂ 2 u1
⎜
⎟
(
)
2
+
µ
+
=
λ
+
µ
2
2 ⎟
⎜ ∂x ∂x
∂t 2
∂x 1
⎝ 1 2 ∂x 2 ⎠
(10・14)
⎛ ∂ 2 u1
∂ 2u 2 ⎞
∂2u 2
∂2u 2
⎜
⎟
+ µ⎜
+
ρ 2 = (λ + 2µ )
2
2 ⎟
∂
∂
x
x
∂t
∂
∂x 2
x
1 ⎠
⎝ 1 2
(10・15)
ρ
が導かれる。
x1方向に伝播する縦波はk∥u1なので、u1=uei(ωt-kx1) と表せて、(10・14)式に代入すると
ρω2 = (λ+2μ)k2
縦波の音速をclとし、(3・1)式を代入すると、(3・2)式が証明される。
ρcl2
= λ+2μ =
4
K+ µ
3
(10.16)
x1方向に伝播する横波はk⊥u2なので、u2=uei(ωt-kx1)と表せて、(10・15)式に代入すると
ρω2 = μk2
横波の音速をctとすると、
ρct2
= μ
(10・17)
17
© Copyright 2026 Paperzz