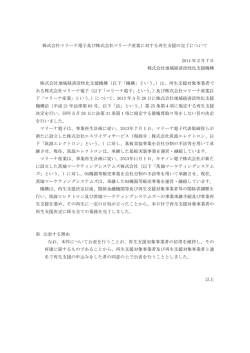
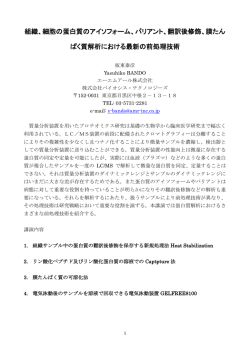
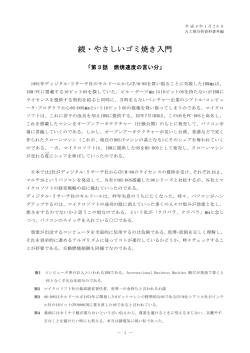
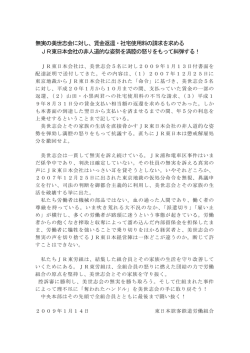
パケットロスを伴う量子化信号による制御系の安定化 システム情報学専攻 原・津村研究室 修士課程 2 年 指導教員 津村 幸治 助教授 星名寛人 平成 19 年 2 月 6 日 1 はじめに 近年の計算機ネットワークや無線通信の急速な普及, およびその高速化により, 通信路を介した制御系の構 築は現実のものとなりつつある. このような背景から, 通信路を介した制御系, ことに通信容量に制約のある場 合, あるいは通信路の信頼性を考慮した制御問題が注目 を集めており, 近年盛んに研究されている 4, 1, 2, 3) . こ れまでに, 線形系に対する安定化問題における最小通 信量 4) , 安定化可能なパケットロス確率の上限などが 導出されており 2, 3) , この分野の研究成果は豊富なも のとなってきている. しかし, これらの研究のほとんど は, 通信路を介した制御系のある特定の問題点しか取り 上げてこなかった. 現実の通信路には信号の量子化や パケットロスなど, 複数の問題が混在しており, これら の問題点を同時に考慮した制御問題の考察が望まれて いる. そこで本研究では, パケットロスを伴う量子化信号に よる制御系の安定化について考える. 与えられた不安 定系に対し, その入力側において確率的なパケットロス が発生する場合, 安定化のためにはどのくらい精細な量 子化信号が要求されるのだろうか ? 本研究では, 安定 化可能な最も粗い量子化器を与えることにより, この 基本的な問いに答える. またこの最も粗い量子化器は, 制御対象の「不安定度」, 制御信号の「精細さ」および 通信路の「信頼性」の三者の間に厳密な関係があるこ とを示しており, 制御系全体の設計, すなわち制御対象 の設計, 量子化器の設計および通信路の選択における明 確な指針となる. 本研究ではまた, 不感帯を有する量子化器を用いた場 合の, パケットロスを伴う量子化信号による安定化につ いて考える. メモリレスの量子化器を用いた制御系に おいては, 量子化信号は固定された有限の離散値をと るため, 平衡点近傍での状態を十分な精度で得ること ができない. そこで, 考える系に対し適切な安定性を導 入し, これを達成する最大の量子化器の不感帯幅を与 える. ここで導入する安定性は, 状態の 2 次モーメン トが定常状態において含まれる領域を保証するものと なっている. この不感帯幅に関する結果を指針として 量子化器を設計することにより, 実用的に問題のない安 定性を実現することが可能となる. 2 パケットロスを伴う量子化信号による安 定化 つぎの確率的なパケットロスを伴うシステムを, 量 子化された制御信号を用いて安定化することを考える (図 1). x(k + 1) = Ax(k) + θ(k)Bv(k) (1) ここで x(k) ∈ Rn は状態, v(k) ∈ R は制御入力, A ∈ Rn×n , B ∈ Rn×1 である. また (A, B) を可安定, A を 不安定と仮定する. θ(k) はシステムの入力側における パケットロスを表す 0–1 確率変数であり, 任意の時刻 k ≥ 0 において以下の確率分布をもつとする. ½ Pr(θ(k) = i) = α, 1 − α, i=0 i=1 (2) 制御入力 v(k) は制御器側から量子化されて転送さ れ, 受け取り先のプラント側で復号される. 特に v(k) はつぎのように与えられるものとする. v(k) = q(u(k)) (3) ここで q(·) はメモリレスの量子化関数 (つまり階段関 数), u(k) ∈ R は量子化のない通常の制御入力であり, 静的な状態フィードバック制御器 K(·) によって生成さ れるものとする. すなわち u(k) = K(x(k)) (4) ここで目標とするのは, つぎで定義する確率 2 次安 定性の達成である. 定義 1. 2 次形式正定関数 V (x) = xT P x について, 任 意の x(k) に対しある正定行列 R が存在して E[V (x(k + 1))|x(k)] − V (x(k)) ≤ −x(k)T Rx(k) (5) を満たすとき, システム (1) の原点は確率 2 次安定で あるという. 以上の準備のもと, つぎの問題について考える. 問題 1. システム (1) に対し, 制御則 (4) のもとで確率 2 次安定化可能な最も粗い量子化器 qc (·) を導出せよ. この問題に対する解を, 定理として以下に示す 5) . v̂ - x G θ 6 v q ¾u K ¾ 図 1: パケットロスを伴う量子化信号による安定化 また制御則 K(·) は, V (x) の期待値の減少率が最大と なるようにすでに最適化されていると仮定する. 不感帯を有する量子化器を用いた場合, 原点付近での 状態を十分な精度で得ることができないため, 系の解軌 道は原点へ収束することはない. ここで目標とするの は, つぎの確率 2 次 practical 安定性である. v 6 p p p p p p p p p p p p ´´ ´ ρv0 p p p p p p ´ v0 p p p ´ ´ -u ´ p p p −v0 ´ ´ p p p p p p −ρv0 ´ ´´ p p p p p p p p p p p p −ρ2 v0 ρ2 v0 定義 2. 任意の x(k) ∈ / Ωc に対し (5) を満たす正定行 列 P , R が存在し, かつ任意の x(k) ∈ Ωc に対し 図 2: 対数型量子化器 E[V (x(k + 1))|x(k)] ≤ c 定理 1. 最も粗い量子化器 qc (u) は以下で与えられる. ρsup +1 ρ +1 u ∈ ( 2ρ vi , sup2 vi ], vi , sup ρ +1 ρsup +1 qc (u) = −vi , u ∈ [− sup2 vi , − 2ρ vi ), (6) sup 0, u = 0, を満たすとき, システム (1) は Ωc において確率 2 次 practical 安定であるという. ただし Ωc は行列 P と正 定数 c によって与えられるレベル集合である. vi = ρisup v0 , v0 > 0, i ∈ Z s +1 1−α , γinf = (7) Q 1u 2 −α −1 |λ | 問題 2. システム (1) に対し, 与えられた行列 P , R, 仕 様 Ωc において確率 2 次 practical 安定化可能となる 対数型量子化器の最大不感帯幅 ²max を導出せよ. ρsup = ここで λui γinf γinf i この量子化器 qc (·) の表現は, 最も粗い量子化器が対 数型量子化器のクラスに属することを表している (図 2). また量子化器の粗さの上限 ρsup は, 制御対象の不安 定極とパケットロス確率を用いて解析的に与えられる ことがわかる. 図 3 は量子化器の粗さ ρ と通信路のパ Q ケットロス確率 α, および制御対象の不安定度 i |λui | の関係を示したものである. 図より, 安定化に必要な量 子化の精度は, 制御対象の不安定性だけでなく通信路の パケットロス確率によっても影響を受け, その確率が大 きいほど精細な量子化が必要となることがわかる. 3 以上の準備のもと, 考えるのはつぎの問題である. この問題に対する解を, 定理として以下に示す. i はシステムの不安定極を表す. 不感帯を有する量子化器を用いた安定化 確率的なパケットロスを伴うシステム (1) を, 不感帯 を有する対数型量子化器から出力される制御信号によ り安定化することを考える (図 1). ここで量子化器 q(·) はつぎで与えられるとする. ρ+1 u ∈ ( ρ+1 vi , 2ρ vi , 2 vi ], ρ+1 q(u) = (8) −vi , u ∈ [− 2 vi , − ρ+1 2ρ vi ), 0, u ∈ [−², ²], vi = ρi v0 , 1 < ρ < ρsup , v0 > 0, i ∈ Z≥0 (9) 定理 2. 対数型量子化器の最大不感帯幅は以下 ²max で 与えられる. r c (10) ²max = γmin ここで γmin はある凸最適化問題の解である. (10) は, 上述の実用安定性を保証する上での厳密な 境界値として求められるという点で興味深い. この条 件を満たす量子化器を設計することで, 系の実用安定化 を達成することができる. 4 まとめ 本研究では, パケットロスを伴う量子化信号による制 御系の安定化について考えた. 安定化に必要な量子化 信号の精細さに着目し, 安定化可能な最も粗い量子化器 を導出した. これは制御対象の「不安定度」, 制御信号 の「精細さ」および通信路の「信頼性」の間の厳密な 関係を示す興味深い結果である. また, 不感帯を有する 量子化器を用いた場合の問題点を考慮し, 適切な安定性 を定義した上で, これを達成する量子化器の不感帯幅の 条件を求めた. 参考文献 ρsup 6 5 ρ 4 3 2 1 0 1 2 0.2 3 0.4 α 4 0.6 0.8 Y 5 1 6 |λu i| i 図 3: 対数型量子化器の粗さ ρ と通信路のパケットロ Q ス確率 α, および制御対象の不安定度 i |λui | の関係 1) N. Elia and S. K. Mitter, “Stabilization of linear systems with limited information,” IEEE Trans. Autom. Control, vol. 46, no. 9, pp. 1384–1400, 2001. 2) N. Elia, “Remote stabilization over fading channels,” Systems & Control Letters, vol. 54, pp. 237–249, 2005. 3) H. Ishii, “Stabilization under shared communication with message losses and its limitations,” in Proc. 45th IEEE Conf. Decision and Control, pp. 4974–4979, 2006. 4) W. S. Wong and R. W. Brockett, “Systems with finite communication bandwidth constraint II: Stabilization with limited information feedback,” IEEE Trans. Autom. Control, vol. 44, no. 5, pp. 1049–1053, 1999. 5) 星名寛人, 津村幸治, 石井秀明, “確率的パケットロスを 考慮した安定化における最も粗い量子化器,” 第 35 回制 御理論シンポジウム資料, pp. 163–166, 2006.
© Copyright 2026 Paperzz