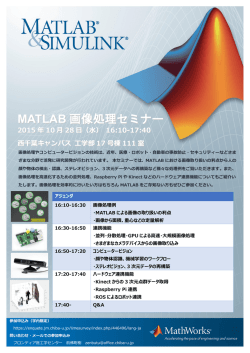
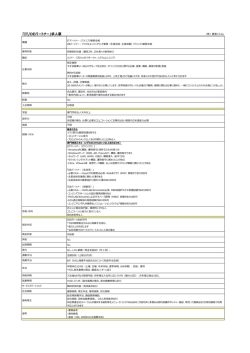
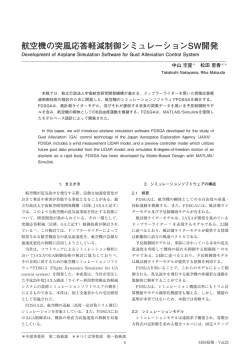
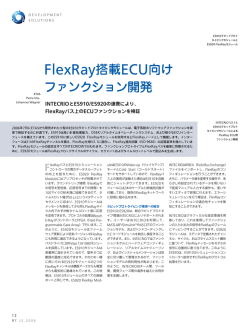
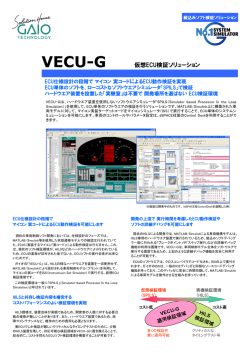
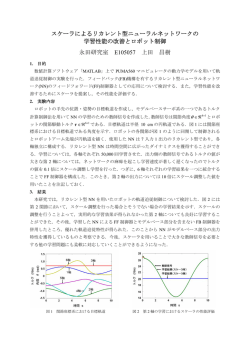
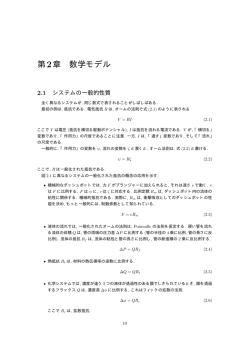
車載電子システムの進化を支える先進開発環境 Review PR 日本イーエスアイ 日本イーエスアイの後藤智氏は、日経 Automotive、日経テクノロジーオンライン と、 テストの自動化や条件の変更が容 走行や、 トンネル内の照明で照らされた ビデオ&魚眼カメラ 3Dレーザースキャナー /マルチレイヤ―LIDAR ● 近距離 /中距離レーダー ● 超音波センサー ● GPS ● 慣性航行システム ● 走行距離計 路面、 夜間走行時のライトに照らされた 走行環境 易なほか、 よりリアルな条 件でカメラ ECUを評価できる (図1) 。 例えば、 夕暮れ時に、 夕日に向かって 主催セミナー「車載電子システムの進化を支える先進開発環境∼効率的な開発 /テ ストを可能にする最新技術とノウハウ」において、 「先進運転支援システム(ADAS) 仮想テスト環境」と題して講演し、仮想のセンサーモデルを使ってECUをテストす ることで、ADAS開発の効率化を図る同社のソリューションを紹介した。 道路なども再現でき、 トンネル内の照明 の数を変更することも容易だ。 雨天時の 当社・日本イーエスアイは、 世界各国中 & Transportation Safety Act)により、 に拠点を持つCAEソフトウェアベンダー 2013年に車両重量4.5t以下の車両に センサー ● ● ● ● コ ント ロ ー ラ MATLAB/Simulink RTMaps ● ECU ● C++ application ● ● δ ステアリング ホイール commands 様々な走行環境をいかにリアルに再現できるか ADASシミュレーションはこれに比べる 図2 シミュレーションに必要なデータの流れ Pro-SiVICではサードパーティのコントローラーにセンサーデータを出力することが可能である。 Raw data ADASを仮想環境でテストする 広く使われている。 Pro-SiVICを使った 気候条件 路面状態 γ エンジン クルマ Yaw 走行環境では、 遠方が霧のようになって 見通しが悪くなっている様子や、 路面に 日本イーエスアイ ESI Group (本社: フランス) の日本法人 はリアビューカメラ/モニターの搭載が義 である。 今回紹介するADASの仮想テス 務化された。 このように、 ADASの搭載 ト環境 「Pro-SiVIC」は、各種ADASセン の義務化・標準化が進み、 その機能が サー、 車両、 走行環境をWindowsPC上 ますます複雑化する中で、 テストコース の車載センサーモデルからのデータを でシミュレーションすることが可能だ。 での実機を用いた検証では追いつかな ECUに出力する機能を備えている。 仮 ADASに関連する最近の動向を見る くなっている。 想センサーモデルには、 カメラ (魚眼カメ と、 欧州では新車アセスメント (ユーロ Pro-SiVICは、標識、建物、樹木など ラを含む) 、 ミリ波レーダー、 LIDAR、 超 NCAP) の 評 価は 緊 急自動ブレーキ の静的な物体、 歩行者など道路上を平 (AEB) 、 車線逸脱警報 (LDW) が2014 カスタマーソリューション開発部 VPソリューション主査 後藤 智 氏 Roll 車両が写り込んでいるところ、 フロントガ Pitch 路面状態 ラスに雨滴が付いて、 速度が上がってく ると周囲に拡散していく様子までリアル なっている。 あと、 陰影を付けるとリアリ チ管理が可能だ。 に再現している。 ティは向上するが、 詳細にするほどリア 一 方 、M A T L A B との 連 携 で は ルタイム性能が落ちてくるので、 モデル Pro-SiVICの各センサーモデルからの の規模やPCの性能との兼ね合いで、 raw dataを受け取るためのMATLAB またPro-SiVICの特徴として、 特にイ 陰影考慮なし、 建物からの影を考慮、 す Workspace Variableと、 MATLABから 音波センサーなどがある。 メージセンサーモデルが強力である点 べての影を考慮、 車両自身の影を考慮 仮想車両モデルへの制御信号を送信 行移動する物体、 そして上下に動く車両 ADASシミュレーションを使う利点と が挙げられる。 霧、 雨、 被写体深度、 ひず の4段階がある。 するため車両の各オブジェクトに対応す 年以降に加点対象になり、 これらの機 のようにダイナミックに運動する物体を してまず挙げられるのは、 様々な走行 み、 周辺減光、 にじみ、 ぶれ、 ぼやけ、 感 最後に、 サードパーティのコントロー る「MATLAB Workspace Variable」が 能がないと、 事実上最高評価を得られな モデル化した走行環境をPC上で再現 シーンを再現でき、 物体やセンサーの配 度、 ノイズ、 露出など多くのフィルター機 ラーモデルとの連携について説明しよ 自動生成される。 くなっている。 また米国ではKT法 (Kids する。 そうした走行環境上の仮想車両 置を瞬時に変更できる柔軟性にある。 能を備えているのがその特長の一つだ。 う。 Pro-SiVICでは、 センサーからの出力 Pro-SiVICは最大60日間無 償で試 実際の走行ではテストドライバーを危険 例えば、 被写体深度フィルターを適用し データおよび車両モデルからの出力デー 用することが可能だ (有償トレーニング にさらすような走行条件も容易に再現 て被写体深度を浅く設定すると、 遠くの タを「M AT L A B/Simulink」 (以下、 要受講) 。 イメージセンサーを校正、 セン できることだ。 雨、 夕暮れ、 夜間などの走 景色がぼやけるといった効果を再現可 MATLAB) や 「RTMaps」 といったコント サー特性をPro-SiVICモデルに反映す 行条件も自由に選べる。 これにより試 能で、 ひずみフィルターでは、 中央が膨ら ローラーモデル へ、 あるいは実ECU、 るための業務委託サービス、 走行環境 作機の製作や、 検証にかかるコスト、 試 んだ樽型のひずみ、 あるいは中央が凹ん C++アプリケーションに出力するための モデルのデータ作成業務も委託サービ 験車両や実験機材を海外などに送る物 だひずみなどを表現し、 また、 カメラの インターフェースを用意している (図2) 。 スとして受託している。 流コストや時間を大幅に節約可能だ。 画像では画像の周辺がどうしても暗くな RTMapsは仏Intempora社が開発し るが、 この現象も周辺減光フィルターで たPro-SiVICとのco-simulation実施 再現できる。 が 可能なツールで、 ADASの設 計プロ 現在、 ADAS用カメラECUの検証に 一方、 車両モデルでは、 ウインカー、 ラ セスにおける様々なセンサーとその設 は、 アニメーション画像などをスクリーン イトなどをすべての動作を再現する。 車 定/データフローを効果的にテストする に投影し、 それを実際にカメラの実機で 体の色も瞬時に変えられる。 またボディ ことを可能にするものだ。 シミュレーショ 撮影して画像をECUに出力する手法が に映り込んだ周囲の環 境もリアルに ンの自動実行や、 設計パラメータのバッ 図1 運転席からの視野をシミュレーションした画面 Pro-SiVICは様々な走行条件や気象条件をリアルに再現できる。ここでは水たまりへの映り込みや、 フロントガラスについた雨滴も再現している。 フロントガラスの雨滴まで再現 強力なイメージセンサーモデルを備える 日本イーエスアイ株式会社 〒160-0023 東京都新宿区西新宿 6-14-1 新宿グリーンタワービル16F TEL ■ 03-6381-8490 FA X ■ 03-6381-8488 URL ■ http://www.esi.co.jp/
© Copyright 2026 Paperzz