『集積の経済を考慮した都市、交通分析』日交研シリーズ A-583 所収
1
2 章 最適都市規模分布の進化的遂行∗
2.1
はじめに
本章では、都市経済学における古典的なトピックである都市システムの理論(Hen-
derson, 1974)を扱う1 。都市システムの理論の主要な関心事項は、市場均衡と社会
的最適状態における都市規模分布の比較である。一般に、最適な都市規模分布は正の
外部性である集積の経済と、負の混雑外部性がバランスするように決まる。したがっ
て、市場均衡で正の外部性が負の外部性よりも大きければ都市規模は過少であり、逆
の場合は過大になる。しかし、正の外部性の方が大きいときは、都市へ移住すること
の便益がコストを上回るため、さらに人口が増えていく。したがって、正の外部性が
支配的な市場均衡は安定的にはならない。このことから、都市システムの理論では、
「市場均衡では都市規模は過大になり、都市数は過少になる」というのが 1 つのコン
センサスになっていると言える。この場合、政府は既存の都市の規模を縮小し、新た
に都市をつくり都市数を増やす必要がある。
政府は各都市の人口を直接規制することによって最適都市規模分布を達成できる
が、そのような政策は現実的ではないため、直接的な人口規制を伴わずに、人々の自
発的な立地選択により最適都市規模分布を達成する方法が研究されてきた。ここで
扱っている都市規模分布の問題では市場均衡の非効率性は外部性により生じている
ため、社会的最適を達成するためには政府は外部性を内部化しなければならない。し
たがって、ピグー税が最適都市規模分布を達成する政策の自然な候補として考えられ
るが、Kanemoto (1980) や Hadar and Pines (2004) によって指摘されているように、
(最適状態も 1 つの均衡にはなるものの)最適ではない他の均衡も生じる可能性があ
り、ピグー税を課しても常に社会的最適の達成を保証できるとは限らないという問題
がある。他の有力なアプローチとしては、都市建設を担う都市ディベロッパーたちが
競争すれば社会的最適が達成されるという議論がある(Henderson, 1986)。しかし、
∗
本章は、Fujishima, S. (2013), ”Evolutionary Implementation of Optimal City Size Distributions,”
Regional Science and Urban Economics, 43, 403-410 を日本語により解説したものである。
1
都市システムの理論のサーベイについては Abdel-Rhaman and Anas (2004) を参照。
都市ディベロッパーたちが文字通り競争的に振る舞うためには、都市ディベロッパー
の数(したがって、都市の数)が任意に大きくなければならない。実際、都市ディベ
ロッパーの数が有限の場合、彼らは戦略的に振る舞うため社会的最適は達成されない
ということが Helsley and Strange (1994) によって指摘されている。 本章では、すぐに社会的最適を達成しようとするのではなく、経済を刺激しながら
長期的に最適都市規模分布を達成する政策を考える。都市システムの理論では、土
台となるモデルは静学的であるものの、人々の立地選択は人口移動動学(migration
dynamic)に従って徐々に調整されていく枠組みを考えることが多いため、このよう
な政策を考えることは自然であると言える。具体的には、政府は毎期、その期に実
現した価格と人口分布で評価された外部性を内部化することによって、長期的に最
適都市規模分布を達成できることを示す2 。しかし、この政策のもとではピグー政策
と同様に一般に複数均衡が生じるため、近視眼的な人口移動動学のもとでは社会的
最適が大域的に安定になるとは限らない。本章では、人々が将来のことまで見越し
て立地を調整すれば、最適でない均衡があったとしてもそれらが長期的には実現し
ないことを示す。立地は一度決めると変更が難しい意思決定であるから、このように
将来のことまで見越した人口移動動学を考えることは自然と言えよう。具体的には
Matsui and Matsuyama (1995) に倣って、人々はいつでも立地を変更できるとは限ら
ないという意味での摩擦(friction)を考えることで、人口移動動学に予見的な期待
(forward-looking expectation)が入るようにする。結果として生じる完全予見動学
(perfect foresight dynamic)のもとでは、大域的な最適解のみが安定になる。 一般に、政策を考えるときはその実現可能性が重要となる。特に、現在の都市規模
分布が最適であるかどうかを判断する上では人々の選好に関する情報が必要になるが、
一般にそれらの情報は政府には知りえない私的情報(private information)であると
いう点が、これまでの研究ではあまり着目されてこなかった。例えば、政府は人々の
選好に関する情報を知らなければ最適状態を計算することができないが、ピグー税は
最適状態で評価された外部性の価値であるため、私的情報がなければピグー政策を行
うことはできない。このように、政府が利用可能な情報の面で制約に直面していると
きに社会的最適などの特定の状態を実現しようとするときは、メカニズムデザインの
2
モデルでは連続時間を考えるため、
「毎期」という言い方は正確ではないが、説明の簡略化のため、
この語法を用いることとする。
2
枠組みを用いることが必要になる。本章では都市システムモデルを連続体のプレイ
ヤーがいる人口ゲーム(population game)として定式化し、Sandholm (2002, 05b)
によって導入された進化的ナッシュ遂行問題(evolutionary Nash implementation)
を考える。もし政府が社会的最適の進化的遂行に成功すれば、経済はどの初期状態か
らスタートしても長期的に社会的最適に収束する。本章ではこの進化的遂行を達成
するための政策として、先に述べたような、毎期その期の人口分布と価格で評価され
た外部性を内部化する政策を考える(この政策をファーストベスト政策と呼ぶ)。ピ
グー税策と異なり、外部性は現在の観察可能な状態で評価されるため、政府は人々の
選好に関する情報に依存せずに政策を実行することができる。 以上のような進化的遂行では、政府はその期に実現した集計的な状態(価格と人口
分布)をみて税金を課すので、通常の VCG メカニズムなどの表明メカニズムと異な
り、個人個人から明示的にメッセージを受け取ることをしない。さらに、人々にすぐ
に均衡をプレーすることを要求せず、人口移動ダイナミックスに従って徐々に均衡に
収束していく状況を考える。したがって、本章で考えるような都市問題は多くの人々
が関与するということを踏まえると、政府にとっても人々にとっても、現実的で文脈
に適した枠組みであると言えよう 。 議論を明快にするため、ここでは都市システムの理論のなかでも以下のようなでき
る限りシンプルなモデルを考える。
• K ∈ {1, 2, 3, …} 個の潜在的な都市と 1 つの後背地が存在する。
• 都市や後背地の間で交易はなく、産業の数は 1 つのみ。
• 各都市では代表的企業が消費財を生産するが、集積の経済は集計的生産関数に
おけるマーシャル外部性を通じてもたらされる(すなわち、生産性が人口の増
加関数になる)。
• 労働者たちは企業が立地している中心業務地区まで通勤するが、その際に混雑
外部性が生じる(すなわち、一人あたりの通勤費用が人口の増加関数になる)。
本章で考えるファーストベスト政策では、政府は毎期、限界生産物の価値を労働者
に賃金として支払うことを企業に指示することによって集積の経済を内部化し、混雑
税を通勤者に課すことで混雑の外部性を内部化し、それらにより生じる赤字を一括税
でファイナンスする(黒字の場合は均等に分配する)。労働の限界生産物と混雑税は
現在の価格と人口分布のもとで評価される。このような政策のもとでは、政府は集計
3
的生産関数と通勤費用を知っていれば、直接的な人口規制や人々の選好に関する情報
を用いることなく、経済を長期的に社会的最適に導くことができる。 なお、上の議論には、この分野で重要な定理であるヘンリー・ジョージ定理が深く
関連している。集積の経済は生産活動における規模の経済によってもたらされるが、
外部性を内部化するため限界費用価格形成を行うと、赤字が生じる。しかし、ヘン
リー・ジョージ定理によれば、都市数が最適であれば、各都市において、限界費用価
格形成により生産活動において生じる赤字が、混雑税の税収と地代収入でちょうど賄
われる。したがって、政府は収支をみることによって、現在の都市規模が最適である
かどうかを判断することができる。さらに、収支がちょうどバランスするような都市
人口を求めることができれば最適都市規模を達成することができるが、そのためには
人々の選好に関する情報が必要となる。本章で考えるファーストベスト政策では、政
府は人々の選好に関する情報を使うことなく、収支がバランスする(すなわち、ヘン
リー・ジョージ定理が成立する)ような都市規模を長期的に達成することができる。
本章の構成は以下の通りである。2.2 節ではモデルを説明した後、均衡と社会的最
適を定義し、安定性分析のために完全予見動学を導入する。2.3 節では進化的ナッシュ
遂行という概念を説明した後、得られた主な結果を記述し、さらにヘンリー・ジョー
ジ定理との関連を議論する。最後に、2.4 節では結論を述べる。
2.2
モデル
K 個の潜在的な都市と1つの後背地からなる経済を考える。 ただし、K は自然数
である。ここで考える経済は、孤立した都市からなるシステムであり、都市や後背地
の間で交易は行われない。経済には測度1の連続体からなる家計が存在する。全人
口は、後に定義するタイプによって p̄ 個のグループに分割され、グループの集合は
P = {1, ..., p̄} で表される。また、mp ≥ 0 をグループ p の人口(もしくは測度)とする。
∑
したがって、当然、 p∈P mp = 1 である。 各家計は行動空間 S = {0, 1, 2, ..., K} をもつ。
ただし、0 は後背地に住むという行動を表し、k ∈ S \ {0} は都市 k に住むという行動を
p
表す。zk ∈ [0, mp ] をグループ p に属する家計のうち行動 k ∈ S をとっている家計の人口
{
}
∑
p
とする。このとき、Zp = zp ∈ R+K+1 : k∈S zk = mp はグループ p に属する家計の行動
∪
空間上の分布からなる集合を表す。今、Z = p∈P Zp とする。このとき、z ∈ Z を人口
4
状態(population state)と呼ぶ。この人口状態は、グループと行動の各ペアに対して、
{
}
∑
p
家計の人口を割り振るものである。 一方、また、X = x ∈ R+K+1 : xk = p∈P zk , z ∈ Z
を定義する。これは、グループ間で集計された家計の行動空間上の分布からなる集合
である。したがって、x ∈ X を集計状態(aggregate state)と呼ぶ。xk は都市 k に居住
する家計の総人口である。政府は集計された人口分布のみを観察できるので、集計状
態は観察できるが人口状態は観察できない。
なお、上記の家計は立地を自由に選択することができたが、経済には動けない家計
p
(immobile household)も存在する。ここで、yk > 0 をグループ p に属していて行動
∑
p
k をとる、動けない家計の人口とする。また、 yk = p∈P yk とする。
各都市は1つの居住地区と1つの中心業務地区(Central Business District: CBD) か
(
)
らなり、企業が CBD で消費財を生産する。集計された生産関数は f (xk ) = h(xk ) xk + yk
で与えられる。ただし、h は連続微分可能で厳密な増加関数である3 。 ここでは消費
財をニュメレール財として扱う。h( · ) は企業にとって外生とする。したがって、賃金
は wk = h(xk ) で与えられ、正の外部性である集積の経済が h( · ) により発生する。
都市 k の各家計は居住地区に住み、CBD に通勤して、非弾力的に1単位の労働を
供給する。通勤にあたり、各家計は T(xk ) の通勤費用を負担する。ただし、T は連続
微分可能で厳密な増加関数である。結果として、一人あたりの通勤費用が都市人口 xk
によって増加するため、通勤では混雑外部性が発生する。都市に住む家計は居住地域
において住宅を消費する。 ただし、都市 k の住宅の総供給量は Hk > 0 で固定されて
p
いると仮定する。今、sk をグループ p に属し都市 k に住む家計のロットサイズとする。
このとき、グループ p ∈ P に属する家計の予算制約式は
p
p
ck + T(xk ) + Rk sk = wk
(2-1)
p
で与えられる。ただし、ck はニュメレール財の消費量、Rk は地代である。地代収入は
経済の外にいってしまうと仮定するが4 、社会的最適のための政策を考えるときは、
政府は政策をファイナンスするために地代収入を用いる。グループ p に属する家計が
厳密に言えば f と h の要素は xk + yk であるが、表記を簡略化するため、 f と h が yk に依存する
ことは明示しない。すなわち、 f (xk ) ≡ f (xk + yk )、h(xk ) ≡ h(xk + yk ) である。これは次の段落で定義さ
れる通勤費用関数についても同様である。
4
これは単純化の仮定である。代わりに、地代収入が家計に均等に配分されると仮定しても結果は
変わらない。
3
5
都市 k に住むことで得ることができる利得は
p
p
ck + vp (Ac ) + up (sk )
(2-2)
で与えられる。ただし、vp (Ac ) は都市のアメニティAc(Roback, 1982)から得る効用で
p∗
あり、up ( · ) は連続微分可能で厳密な凹関数である。z ∈ Z を所与としたとき、{sk }p∈P
を
p
up′ (sk ) = Rk ∀p ∈ P,
∑
p
p p
p∈P (zk + yk )sk = Hk ,
(2-3)
(2-4)
の解とする。(2-3) は効用最大化の一階条件、(2-4) は住宅市場の需給均衡条件である。
このとき、z ∈ Z を所与とすると、グループ p に属する家計が都市 k に住むことによ
り得られる最大効用は以下で与えられる。
p
p∗
p∗
Uk (z) = wk − T(xk ) − Rk sk + vp (Ac ) + up (sk ). (2-5)
一方、後背地では生産活動や通勤、住宅はないものとする。後背地に住む家計は、
後背地のアメニティAr のみから効用を得る。したがって、グループ p に属する家計が
p
後背地に住むことの利得は U0 (n) = vp (Ar ) である。
2.2.1
人口ゲーム
up ( · ) は実ベクトル γp でパラメタライズされるとする。均衡では効用差のみが重要
(
)
となるため、vp ≡ vp (Ar ) − vp (Ac ) を考える。今、θ = vp , γp p∈P をタイプ分布(type
distribution)と呼ぶ。θ は実有限集合 Θ の要素であると仮定する。
以下の分析では、政府は h( · ) と T( · ) は知っており、x ∈ X と {Rk }k∈S\{0} を観察でき
るが、θ ∈ Θ は知らないと仮定する。ここで、政府は集計状態を観察できるが人口状
態は観察できないことを再度注意しておく。
以上のモデルを、人口ゲーム(population game)G = (U, θ) として表現する。この
ゲームでは、プレイヤー集合は測度 1 の連続体からなる家計、プレイヤーの行動空間
6
p
は S、利得ベクトルは U = {Uk }、タイプ空間は Θ で与えられる5 。 G のナッシュ均衡
は以下の条件を満たす人口状態 z∗ ∈ Z である。
(2-6)
zk > 0 ⇒ k ∈ arg max j∈S U j (z∗ ) for all k ∈ S and p ∈ P.
p∗
p
つまり、上の条件は、もし行動 k をとる家計の人口が正であるならば、その行動は人
口状態 z∗ のもとで最適反応になることを要求している。
例 2.1 (集積均衡). P = {1} とし、上付き文字 p を省略する。h(xk ) = ε(xk + yk )、T(xk ) =
t(xk + yk )、u(sk ) = sk 、そして全ての k ∈ S について yk = y とする6 。さらに、v < 0 であ
り、y は限りなくゼロに近いとする。このとき、sk = Hk /(xk +y)、Rk = u′ (sk ) = 1 なので、
全ての k ∈ S \ {0} について Uk (z) = ψ(xk ) + v(Ac ) である。ただし、ψ(xk ) = h(xk ) − T(xk )
である。この例では、集積の経済の度合いは ε で表され、混雑外部性の度合いは t で
表される。今、全ての家計が都市 k∗ に立地しているとする。このような人口状態を集
積と呼ぶ。このとき、ψ(1) ≥ max{ψ(0), v} であれば、都市 k∗ に住む家計は立地を変
更する誘因を持たない。したがって、t ≤ ε、すなわち、集積の経済が混雑外部性より
も大きければ、集積がナッシュ均衡になる。
2.2.2
社会的最適
本節では、社会的最適を考える。まず、社会厚生関数を以下のように与える。
∑
∑
(
)
p
p p
p
p
p
p
p p∗
SW(z; θ) ≡ max
(z
+
y
)v
(A
)
+
(z
+
y
)
c
+
v
(A
)
+
u
(s
)
r
c
0
k
k
k
k
p
0
{c }
k
p∈P
k∈S\{0}
∑
p
p p
s.t.
(zk + yk )ck + (xk + yk )T(xk ) ≤ f (xk ) for k ∈ S \ {0}
(2-7)
=
∑
p∈P
f (xk ) − (xk + yk )T(xk ) +
∑ ∑
(
)
p
p
p∗
(zk + yk ) up (sk ) − vp + C
p∈P k∈S\{0}
k∈S\{0}
5
Sandholm (2001) は、連続体のプレイヤーからなるゲームを人口ゲーム(population game)と呼
んでいる。このゲームでは、各プレイヤーは測度ゼロで影響力を持たないため、個人間の直接的な戦
略的相互関係はなく、集計された状態を通じた間接的な戦略的相互関係のみが存在する。したがって、
ナッシュ均衡は各プレイヤーの戦略ではなく人口状態で定義される。
6
この例では、効用関数は厳密な凹関数ではない。しかし、1 グループしかないため、ロットサイズ
は sk = Hk /(xk + y) として、住宅市場の需給均衡条件から直接決定される。
7
ただし、C は定数である。これは、人口状態 z を所与としたときに、資源制約のもと
で家計の総利得を最大化することにより得られるものである。上の問題では、政府は
土地市場を与えられたものとしている。ここで、SW( · ; θ) は有限個の臨界点(critical
point)をもつと仮定する。政府は、上の関数が最大になるような人口状態 z ∈ Z の達
∑
p
成を目指す。ここで、実際に問題を解くにあたり、z を選ぶ代わりに、 k∈S\{0} zk ≤ 1
p
p
と zk ≥ 0 for all k ∈ S \ {0} and p ∈ P という制約のもとで {zk }k∈S\{0},p∈P を選ぶ。この
p
とき、zk (ただし k ∈ S \ {0})に関するクーンタッカー条件は
(2-8)
′
′
f (xk ) − T(xk ) − (xk + yk )T (xk ) +
∑
q
(zk
+
q∈P
で与えられる。ただし、µp ≥ 0 は制約条件
p
である。この条件は zk
∑
q∗
q q′ q∗ ∂sk
yk )u (sk ) p
∂zk
p
k∈S\{0} zk
p∗
− vp + u(sk ) − µp ≤ 0
≤ 1 に対するラグランジュ乗数
> 0 であれば等号で成り立つ。今、(2-3)-(2-4) 式からなる連立
方程式に陰関数定理を応用すると、
q∗
∂sk
(2-9)
p
∂zk
p∗
∏
ur′′ (sr∗
)
k
∏
r
r
t′′ t∗
r∈P (zk + yk )
t,r u (sk )
= −∑
sk
r,q
p∗
を得る。したがって、up′ (sk ) = Rk for all p ∈ P であることに注意すると、(2-8) 式は
(2-10)
f ′ (xk ) − T(xk ) − (xk + yk )T′ (xk ) − Rk sk − vp + u(sk ) − µp ≤ 0
p∗
p∗
になる。この条件は、社会的最適では全ての外部性が内部化されていなければならな
いということを述べている。すなわち、(2-5) 式と比較すると、都市では、労働者は
賃金として限界生産物 f ′ (xk ) を受け取る一方、通勤する際は追加的に混雑外部性の価
値 (xk + yk )T′ (xk ) を負担しなければならない。
2.2.3
完全予見動学
最初の節でも議論したように、たくさんの人がいる経済においてはナッシュ戦略を
すぐにとるのは困難である。したがって、本章ではゲームを繰り返しプレーし、徐々
に均衡戦略を学んでいく状況を考える。結果として経済が行き着く状態は、長期的な
均衡として解釈される。まず、学習プロセスを表現するために、人口状態の軌道を記
8
述する進化動学(evolutionary dynamic)を考える。都市経済学の分野では近視眼的
な進化動学を考えることが多いが、ここでは Matsui and Matsuyama (1995) に倣っ
て、予見的期待(forward-looking expectation)が織り込まれた進化動学を考える。
特に、立地変更の機会がランダムにおとずれ、人々は現在の立地に一定期間コミット
しなければならないという意味での摩擦(friction)を考える。立地変更の機会はパ
ラメーター λ > 0 のポワソン過程に従っておとずれるとする。立地変更機会の到来は
人々の間で独立であり、したがって、マクロでみた不確実性(aggregate uncertainty)
はないものとする。このとき、人々が現在の立地にコミットしなければならない平均
期間は 1/λ となる。今、ρ > 0 を割引率とする。このとき、δ ≡ ρ/λ を摩擦の度合い
(degree of friction)と呼ぶ。摩擦の度合いが大きくなれば、人々は現在のことをより
重視するようになるか、もしくはコミットメントの平均期間がより長くなる。Oyama
(2009) もこれと同じ摩擦を考え、新しい経済地理学(New Economic Geography)で
重要なトピックとなっている歴史と期待の問題を分析している。 以下では、Oyama
(2009) の枠組みをほぼ踏襲する形で分析を進めていく。
今、人口ゲーム G = (U, θ) を考え、さらに家計は完全予見が可能だとする。すなわ
ち、均衡では、彼らは各行動 k ∈ S から得られる期待将来利得の現在価値を比較し、
立地選択を行う。コミットメントの期間が平均 1/λ の指数分布に従うため、期間 t に
おいて、行動 k ∈ S から得られる期待将来利得の現在価値は以下のように計算される。
p
Vk (t)
(2-11)
= (λ + ρ)
= (λ + ρ)
∫ ∞∫
∫0 ∞
t
t+ν
t
e−ρ(ξ−t) Uk (z(ξ))dξλe−λν dν
p
e−(λ+ρ)(ν−t) Uk (z(ν))dν.
p
今、人口移動動学(migration dynamic)を導入するため、集合
{
}
p
p
B(t) = α ∈ Z : αk > 0 ⇒ k ∈ arg max j∈S V j (t)
を定義する。これは、グループ p に属するプレイヤーが行動 k をとったときの利得が
p
Vk (t) で与えられる場合の最適反応対応 (best response correspondence)である。こ
のとき、次の微分包含式(differential inclusion)を考える。
(2-12)
ż(t) ∈ λ(B(t) − z(t)).
9
家計は立地選択をするとき将来利得を考慮に入れるため、これは予見的な期待が入っ
た人口移動動学である。実際、ρ = ∞(すなわち、人々は近視眼的)で、 λ = 1 とな
るように時間の単位を基準化したとき、上の動学は近視眼的な動学である最適反応動
学(best response dynamic) (Gilboa and Matsui, 1991; Matsui, 1992) になることを
注意しておく。初期状態 z0 ∈ Z を所与としたとき、ほとんど全ての t ≥ 0 について
ż(t) = λ(α(t) − z(t)) が成り立つような α(t) ∈ B(t) が存在するならば、z( · ) を (2-12) 式
の解軌道(solution trajectory)と呼ぶ。特に、解軌道がリプシッツ連続で、かつ Z
を離れることがなければ、その解軌道を z∗ ( · ) で表し、完全予見軌道(perfect foresight
p
path)と呼ぶ。V j (t) はそれぞれ連続なので、任意の初期状態 z0 ∈ Z について完全予
見軌道は存在することが分かる (Oyama et al., 2008)。さらに、z が (2-12) 式の平衡点
になることと、z が G のナッシュ均衡になることは同値である。
2.2.4
安定性分析
本章で分析したいことの 1 つは、人口ゲーム G の均衡の、完全予見動学のもとでの
安定性である。しかし、ここで考えている動学は微分包含式であるため、初期状態を
固定したときに解軌道が一意に定まるとは限らない。したがって、ここでは、Matsui
and Matsuyama (1995) によって導入された、通常よりも弱い安定性概念を考える。
今、Bε (z) を、z を中心とし、ε > 0 を半径とする開球体とする。さらに、z ∈ Z と集
合 A ⊆ Z の距離を d(z, A) = mina∈A ∥z − a∥ で定義する。人口ゲーム G = (U, θ) を考え
る。このとき、z ∈ Z を初期値とし、A ⊆ Z に収束する完全予見軌道があるならば、
A ⊆ Z は z ∈ Z から到達可能(accessible)であるという。さらに、A ⊆ Z が Z の全て
の点から到達可能であれば、A ⊆ Z は大域的に到達可能(globally accessible)である
という7 。また、各 a ∈ A に対して実数 ε(a) > 0 が存在して、Bε(a) (a) に初期値をとる任
意の完全予見軌道が A に収束するなら、A ⊆ Z は吸収的(absorbing)であるという。
以上の基準のもとで G の均衡の安定性を分析するために、G がポテンシャルゲー
ムであることを用いる。ここで、ポテンシャルゲームは以下のように定義される。
{
}
∑
p̄(K+1)
p
Z = z ∈ R+
: ∀p ∈ P, mp − η < k∈S zk < mp + η とする。ただし、η > 0 である。
7
完全予見動学の解軌道は一意とは限らないため、A が大域的に到達可能だとしても、A に収束し
ない他の完全予見軌道が存在する可能性もある。この意味で、吸引性(attractiveness)などの通常の
微分方程式の安定性概念よりも弱い概念になっている。
10
このとき、連続微分可能な関数 W : Z → R が存在して、
(2-13)
∂W(z) ∂W(z)
p
q
= Uk (z) − Uℓ (z)
p −
q
∂zk
∂zℓ
for all k, ℓ ∈ S and p, q ∈ P.
を満たすならば、G をポテンシャルゲーム(potential game)と呼ぶ。また、このとき、
W はポテンシャル関数(potential function)と呼ばれる。W が Z 上で定義されている
のは、Z の境界で W の微分をとる必要があるからである。以下の補題は、我々のゲー
ムがポテンシャルゲームであることを示している。
補題 2.1. G はポテンシャルゲームである。
証明 . W(z) =
∑
(
)
∫ xk
∑
∑ ∑
p p
p
p
p p∗
p
v
(A
)+
z
(h(ν)−T(ν))dν+
(z
+y
)
u
(s
)
+
v
(A
)
r
c
p∈P 0
k∈S\{0} 0
p∈P
k∈S\{0} k
k
k
がポテンシャル関数になる。
上記のポテンシャル関数は有限個の臨界点をもつと仮定する。このとき、以下のポ
テンシャルゲームの性質が我々にとって有益になる。
補題 2.2. G を、W をポテンシャル関数としてもつポテンシャルゲームであるとする。
このとき、摩擦の度合いにある閾値 δ̄ > 0 が存在して、全ての δ ∈ (0, δ̄] について、W
の大域的最大解は吸収的かつ大域的に到達可能である。
証明 . Fujishima (2013) を参照。
したがって、(2-8) 式よりゲーム G のポテンシャル関数の大域的最大解は社会的最
適ではないことに注意すると、大域的最大解は近傍に初期値をとる完全予見軌道を
全て吸収するので、社会的最適の集合はゲーム G のもとでは大域的に到達可能では
ない。すなわち、初期値が社会的最適から離れていれば、経済は社会的最適に収束で
きない可能性がある(特に、ポテンシャル関数の大域的最大解の近傍に初期値があっ
た場合、社会的最適には収束しない)。したがって、社会的最適への収束を保証する
ために何らかの政策が必要である。特に、補題 2.2 は、政府は社会厚生関数がポテン
シャル関数になるようにゲームを変える必要があるということを示唆している。次節
では、そのようなゲームをもたらす政策を考える。
11
進化的遂行
2.3
本節では、Sandholm (2002, 05b) によって導入された(社会的最適の)進化的遂行
を考える。そのために、政府が何らかの政策を行い、家計がその政策のもとでのゲー
ムをプレーする状況を考える。特に、以下のようなゲーム G∗ = (U∗ , θ) を考える。
p∗
(2-14)
U0 (z) = vp (Ar ) + Ω,
(2-15)
Uk (z) = w∗k − T(xk ) − τ∗k − Rk sk + vp (Ac ) + up (sk ) + Ω,
p∗
p∗
p∗
ただし、w∗k = f ′ (xk )、τ∗k = (xk + yk )T′ (xk )、Ω =
∑
k∈S\{0}
for k ∈ S \ {0},
f (xk ) − w∗k (xk + yk ) + τ∗k (xk +
yk ) + Rk Hk である。このゲームでは、政府は以下のことを行う。
• 企業に、限界生産物 {w∗k }k∈S\{0} を賃金として支払うように指示する。
• 通勤者に、混雑税 {τ∗k }k∈S\{0} を課す8 。
• 賃金を限界生産物にしたことにより生じる生産活動の赤字を混雑税と地代の収
入で賄うが、不足分や余剰が生じた場合は一括の金銭移転 Ω により対処する。
なお、地代を情報として活用するため政府は土地市場には介入しない。この政策は、
タイプ分布 θ ∈ Θ を知らなくても実行可能であるという点が重要な特色である。以下
では、この政策をファーストベスト政策 (first-best policy) と呼ぶ。
進化的遂行を厳密に定義するため、社会選択対応(social choice correspondence)ϕ :
Θ ⇒ Z を導入する9 。この対応は、各タイプ分布 θ ∈ Θ に人口状態 z ∈ Z(の集合)
を割り振るものである。このとき、進化的遂行は以下のように定義される。
定義 2.1. G∗ のもとで、全ての θ ∈ Θ について ϕ(θ) が吸収的かつ大域的に到達可能な
らば、ファーストベスト政策は社会選択対応 ϕ を進化的に遂行する。
したがって、政府が社会選択対応 ϕ(θ) を進化的に遂行したならば、全ての θ ∈ Θ
について、ϕ(θ) の近くに初期値をとる任意の完全予見軌道は ϕ(θ) に収束し、かつど
こを初期値にとっても、そこから ϕ(θ) に収束する完全予見軌道が存在する。
8
9
都市 k に住んでいる動けない家計も w∗k を受け取り τ∗k を支払う。
メカニズムデザインの基本的な枠組みや概念については坂井・藤中・若山(2008)を参照。
12
社会選択対応としては任意のものを考えられるが、本章の文脈において最も自然な
のは、以下で定義される効率的社会選択対応 ϕ∗ である。
ϕ∗ (θ) = arg maxz∈Z SW(z; θ).
(2-16)
すなわち、効率的社会選択対応は各タイプ分布 θ ∈ Θ に対して社会的最適(の集合)
を割り振る。ここで、(2-10) 式より、G∗ が社会厚生関数 SW をポテンシャル関数とし
てもつポテンシャルゲームであることは直ちに分かる。したがって、補題 2.2 より、
本章の主要な結果を以下のように述べることができる。
命題 2.1. 摩擦の度合いの閾値 δ̄ > 0 が存在して、全ての δ ∈ (0, δ̄] について、ファー
ストベスト政策は効率的社会選択対応 ϕ∗ を進化的に遂行する。
証明 . Fujishima (2013) を参照。
したがって、摩擦の度合いが十分に小さければ、ファーストベスト政策により社会
的最適の近くに初期値をとる任意の完全予見軌道は社会的最適に吸収され、また、Z
のどこに初期点をとってもそこから社会的最適に収束する完全予見軌道の存在が保証
される。この政策のもとでは、政府はただ、現在の観察可能な価格と人口分布で評価
された外部性の内部化を、毎期行えばよい。
2.3.1
近視眼的な進化動学
これまでの議論では、予見的な期待が織り込まれた進化動学を考えたが、もともと
進化的遂行を導入した Sandholm (2002, 05b) は、近視眼的な進化動学を考えている。
本節では、Sandholm (2002, 05b) の議論を概観し、完全予見動学の場合と異なり、近
視眼的な進化動学のもとでは、ファーストベスト政策を用いても長期的に最適都市規
模分布を達成できるとは限らないことを示す。
今、W をポテンシャル関数としてもつポテンシャルゲーム G = (U, θ) を考える。単
純化のため、P = {1}(すなわち、1 グループのみ)とし、上付き文字の p を省略する。
Sandholm (2001) は、以下の条件を満たす進化動学 g : Z → RK+1 の類を考えた。
(LC) g はリプシッツ連続、
13
(FI) Z は ż = g(z) のもとで前方不変(forward invariant)、
(PC) g(z) , 0 ⇒ g · U > 0、
(NC) g(z) = 0 ⇒ z は G のナッシュ均衡
条件 (LC) は、各初期点に対して解軌道が一意に存在するための技術的な条件である。
直感的には、この条件は人口状態の変化が連続的でジャンプなどがないことを要求し
ている。条件 (FI) も、解軌道が Z を離れることがないようにするための技術的な条件
である。条件 (PC) を解釈するために、 g · U を以下のように書き換える。
(2-17)
g·U =
∑
k∈S
∑
1
gk (z) Uk (z) −
U j (z) .
K + 1 j∈S
もし家計が合理的に行動したならば、k について和をとっている各項はそれぞれ正に
なるはずである。すなわち、もしある行動の利得が平均利得よりも大きければ(すな
∑
1
わち、Uk (z) − K+1
j∈S U j (z) > 0)、その行動をとる家計の人口は増加する(すなわ
ち、gk (z) > 0)はずである。しかし、条件 (PC) はこのことが集計的に成り立つことの
みを要求している。したがって、平衡点に至る過程においては非合理的な選択が行わ
れることもあり、人々は試行錯誤をしながら立地を調整していくと解釈される。条件
(NC) は、もし行動を変更することで利得を増やすことが可能ならば、誰かが必ず行
動を変更するという条件である。Sandholm (2001) の命題 4.3 より、条件 (FI) と (PC)
のもとでは逆も成り立つ。したがって、条件 (FI)、(PC)、(NC) のもとでは、z が g の
平衡点になることと、z が G のナッシュ均衡になることは同値である。
Sandholm は、進化動学が上の 4 つの条件を満たすならば、G に許容される(admissible)と定義している10 。そして、Sandholm の遂行概念は、この許容される進化
動学の類に関して定義される。すなわち、もし、全ての θ ∈ Θ について、G∗ に許容
される任意の進化動学のもとで、Z のどこに初期点をとっても ϕ(θ) に収束するなら
ば、ファーストベスト政策は ϕ を(Sandholm の意味で)進化的に遂行する11 。
完全予見動学のケースと同様に、均衡の安定性を分析する際にポテンシャルゲーム
10
許容される進化動学の具体例は Sandholm (2005a) を参照。ここで注意すべきことは、経済地理モ
デルでよく用いられる複製子動学(replicator dynamic)は許容される進化動学ではないということ
である。実際、複製子動学は境界で必ず平衡するが、境界点が常にナッシュ均衡になるとは限らない
ため、条件 (NC) を満たさない。
11
ただし、Sandholm は各行動に税金を課す価格スキーム(price scheme)を考えている。
14
の性質を用いる。特に、以下の結果が有益である。
補題 2.3 (Sandholm, 2001). (i) z が G のナッシュ均衡であることと、z が W の最大化
のクーン・タッカー条件を満たすことは同値である、(ii) G に許容される任意の進化
動学のもとでは、Z のどこに初期点をとっても、G のナッシュ均衡に収束する、(iii)
もしナッシュ均衡が有限個ならば、W を局所的に最大にする全てのナッシュ均衡は、
G に許容される任意の進化動学のもとで漸近的に安定になる。
したがって、ポテンシャルゲームの均衡と、そのゲームに許容される進化動学のもと
でのそれらの均衡の安定性は、ポテンシャル関数を用いて分析することができる。こ
の点を以下で例示する。
例 2.2 (均衡の安定性). 例 2.1 と同じゲーム G = (U, θ) を考える。ここでは、特に集積
と分散の 2 つの均衡の安定性を分析する。W を補題 2.1 で与えた G のポテンシャル関
数とする。まず、ある k∗ ∈ S \ {0} について xk∗ = 1 となるような集積 x∗ を考える。こ
∑
のとき、W の全微分を x∗ で評価すると dW = (ψ(1) − v)dzk∗ + k,k∗ ,0 (ψ(0) − v)dzk で
与えられる。したがって、t < ε ならば W は x∗ で局所的に最大化され、集積は G に
許容される任意の進化動学のもとで漸近的に安定になる。
一方、全ての k ∈ S \ {0} について xk = 1/K となるような分散は、ψ(1/K) ≥ v ⇔ t ≤
ε − Kv であればナッシュ均衡になる。さらに、W は ε < t のとき Z 上で厳密に凹にな
るので、ε < t ≤ ε − Kv ならば分散は一意に漸近的に安定な均衡になる(例 2.1 で与
えた仮定より v < 0 であることに注意せよ)。しかし、ε − K2 v < t のとき SW の最大
化のクーン・タッカー条件は満たされないので、分散は最適ではない。したがって、
ε − K2 v < t < ε − Kv のとき、分散は G に許容される任意の進化動学のもとで一意に漸
近的に安定であるにも関わらず、最適ではない12 。
補題 2.3 (ii) より、Z のどこに初期点をとっても、G∗ に許容される任意の進化動学
は G∗ のナッシュ均衡に収束し、さらに補題 2.3 (i) より、ϕ∗ (θ) の全ての要素は G∗ の
ナッシュ均衡である。したがって、もし G∗ のナッシュ均衡の集合が ϕ∗ (θ) と一致する
ならば、政府は Sandholm の意味で進化的遂行を達成することができる。しかし、最
適でない均衡も存在すれば、常に ϕ∗ (θ) に収束するとは限らない。
12
完全予見動学のもとでも、吸収的かつ大域的に到達可能である。
15
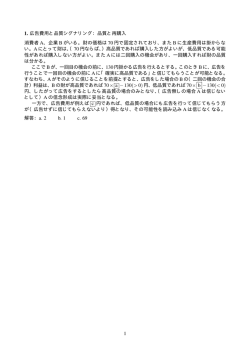
この点を具体的に見るために、h(xk ) = exp(−ε/(xk + yk ))(Henderson, 1987)、
T(xk ) = t(xk + yk )、u(sk ) = sk 、K = 2、ε = 0.3、t = 0.6、v = 0.2、 y1 = y2 = 0.01 とす
る。図 1 はこのときの社会厚生関数 SW のカントール図(x 軸と y 軸はそれぞれ都市
1 と都市 2 の人口)であり、色が薄くなるほど社会厚生が高くなる。SW は分散均衡
(x1 = x2 = 1/2)で最大になっているが、都市が形成されない均衡(x0 = 1)や、1 都
市への部分的集積均衡(x0 > 0 and xk = 1 − x0 for some k ∈ {1, 2})でも局所的に最
大になっている。したがって、補題 2.3 (iii) よりそれらの最適でない均衡は漸近的に
安定になり、ファーストベスト政策のもとでは SW がポテンシャル関数になることに
注意すると、政府は進化的遂行を達成できないことが分かる。
図 1: SW のカントール図
この問題を回避する直接的な方法は、Sandholm (2002, 05b) におけるように、SW
が厳密な凹関数であると仮定することである。しかし、そうした場合、集積が最適に
なることが決してないケースに焦点を絞ることになる。したがって、集積は現実にお
いて重要な経済現象であるということを踏まえると、この仮定は我々の文脈において
は望ましくない。そこで、ここでは、社会厚生関数の性質に関して仮定を置く代わり
に、立地は一度決めると変更が難しい意思決定であるという点を踏まえ、人々が予見
的に立地を調整する状況を考えた。補題 2.2 と補題 2.3 を比較すると、近視眼的な進
化動学のもとでは全ての局所的最適解が漸近的に安定になる一方、完全予見動学のも
とでは大域的最適解のみが吸収的かつ大域的に到達可能になっており、この仮定が数
16
理的にどう機能しているかが分かる13 。
2.3.2
ヘンリー・ジョージ定理
本節では、これまでの内容の、ヘンリー・ジョージ定理との関連を議論する。ヘン
リー・ジョージ定理(Henry George Theorem)によれば、もし都市数が最適になって
いるならば、各都市において、限界費用価格形成により生産活動において生じる赤字
は、混雑税と地代の収入でちょうどまかなわれる14 。したがって、支出と収入を比較
することによって、現在の都市規模分布が最適であるかどうかを判断することができ
る。しかし、ヘンリー・ジョージ定理を用いても、最適都市規模を事前に割り出すこ
とができるのは政府が人々の選好に関する情報をもっているときである。このことを
みるために、P = {1}、そして全ての k ∈ S について yk = y、Hk = H とする。また、
w∗ = f ′ (x∗ )、τ∗ = (x∗ + y)T′ (x∗ )、R∗ = u′ (H/(x∗ + y)) とする。ただし、x∗ は
f (x∗ ) − w∗ (x∗ + y) + τ∗ (x∗ + y) + R∗ H = 0
(2-18)
の解である。すなわち、x∗ はヘンリー・ジョージ定理が成り立つような都市規模であ
る。現実における都市の数は自然数であるが、便宜上、ここでは任意の正の実数値を
とれるものとする。このとき、我々のモデルには後背地があるため、最適な都市数は
以下で与えられる。
(2-19)
∗
1/x
0
if w∗ − T(x∗ ) − τ∗ − R∗ H/(x∗ + y) + u(H/(x∗ + y)) ≥ v,
otherwise.
もし、政府が都市をつくることが最適であるということを知っているならば、現在の
価格と人口分布で評価された Ω をみることによって、現在の都市規模分布が最適であ
るかどうかを判断することができる。しかし、一般には政府は v を知らないため、こ
のような判断は困難である。さらに、仮に v を知っていたとしても、ヘンリー・ジョー
13
Sandholm (2007) は社会厚生関数が厳密に凹でないケースを分析するために、確率的進化的遂行
(stochastic evolutionary implementation)を考えた。モデルは本章と本質的には同じであり、戦略変更
の機会が確率的におとずれる状況を考えている。しかし、彼のモデルでは有限人口におけるロジット
選択ルールを考えており、分析においてはマルコフ連鎖の性質を利用している。一方、完全予見動学
の枠組みは連続体からなる人口を考えるため、我々が扱う問題に適したものであると言える。
14
例えば、金本(1997)の第 7 章や Fujita and Thisse (2002) の第 4 章を参照。
17
ジ定理に従って (2-18) 式を満たすような都市規模を計算するためには、R∗ の計算式
(すなわち、u′ (H/(x + y)))を知っている必要があるため、効用関数に関する情報が
要求される。本章で考えたファーストベスト政策では、政府は人々の選好に関する情
報を使わずに、長期的にヘンリー・ジョージ定理が成立するような都市規模を達成し
ている(ただし、実際の都市数は自然数なので厳密には成立しない)。
2.4
結論
本章では、直接的な人口規制や人々の選好に関する情報を用いることなく、長期的
に最適都市規模分布を達成する政策を考えた。この政策において政府がすべきことは
単純であり、現在の価格と人口分布で評価された外部性の内部化を毎期行えばよい。
このような、選好に関する情報を使わずに社会的最適を達成するというメカニズムデ
ザインの視点からの問題意識は、都市経済学の分野ではこれまであまり議論されてこ
なかったが、本章で得られた結果は、最適都市規模分布を達成するためには直接的な
人口規制が必要であるという議論の再検討につながると考えられる。
本章では、孤立した都市(と後背地)からなるシステムを考えた。しかし、Anas
and Xiong (2005) や Tabuchi and Thisse (2006) が示しているように、都市間交易や
複数の産業などを考えると、都市ヒエラルキーなど様々な安定均衡が出てくる。した
がって、ここで考えたような政策が、より一般的な都市システムにおいても機能する
かという問題は、今後の重要な研究課題であろう。
参考文献
金本良嗣(1997)『都市経済学』東洋経済新報社.
坂井豊貴、藤中裕二、若山琢磨(2008)
『メカニズムデザイン‐資源配分制度の設
計とインセンティブ‐』ミネルヴァ書房.
Abdel-Rahman, H. M., A. Anas., 2004. Theories of systems of cities, in: J. V.
Henderson., J.-F. Thisse. (eds.), Handbook of Regional and Urban Economics,
North-Holland, 2293-2339.
Anas, A., K. Xiong., 2005. The formation and growth of specialized cities:
efficiency without developers or Malthusian traps. Regional Science and Urban
Economics. 35, 445-470.
18
Fujishima, S. (2013), ”Evolutionary Implementation of Optimal City Size Distributions, ”Regional Science and Urban Economics, 43, 403-410
Fukao, K., R. Bénabou., 1993. History versus expectations: a comment. Quarterly
Journal of Economics. 108, 535-542.
Fujita, M., J.-F. Thisse., 2002. Economics of Agglomeration. Cambridge University
Press.
Gilboa, I., A. Matsui., 1991. Social stability and equilibrium. Econometrica, 59,
859-867.
Hadar, Y., D. Pines., 2004. Population growth and its distribution between
cities: positive and normative aspects. Regional Science and Urban Economics,
34, 125-154.
Helsley, R. W., W. C. Strange. 1994. City formation with commitment. Regional
Science and Urban Economics, 24, 373-390.
Henderson, J. V., 1987. Systems of cities and inter-city trade, in: P. Hansen., M.
Labbé., D. Peeters., J.-F. Thisse., J. V. Henderson. (eds.), Systems of Cities and
Facility Location, Harwood Academic Publishers, 71-119.
Henderson, J. V., 1986. Economic Theory and the Cities. Academic Press.
Henderson, J. V., 1974. The sizes and types of cities. American Economic Review.
64, 640-656.
Hofbauer, J., G. Sorger., 1999. Perfect foresight and equilibrium selection in
symmetric potential games. Journal of Economic Theory. 85, 1-23.
Kanemoto, Y., 1980. Theories of Urban Externalities. North-Holland.
Krugman, P., 1991. History versus expectations. Quarterly Journal of Economics.
106, 651-667.
Matsui, A., 1992. Best response dynamics and socially stable strategies. Journal
of Economic Theory, 57, 343-362.
Matsui, A., K. Matsuyama., 1995. An approach to equilibrium selection. Journal
of Economic Theory. 65, 415-434.
Oyama, D., 2009. Agglomeration under forward-looking expectations: potentials and global stability. Regional Science and Urban Economics. 39, 696-713.
Oyama, D., S. Takahashi., J. Hofbauer., 2008. Monotone methods for equilibrium
selection under perfect foresight dynamics. Theoretical Economics. 3, 155-192.
Roback, J., 1982. Wages, rents, and the quality of life. Journal of Political Economy.
90, 1257-78.
Sandholm, W. H., 2007. Pigouvian pricing and stochastic evolutionary implementation. Journal of Economic Theory. 132, 367-382.
Sandholm, W. H., 2005a. Excess payoff dynamics and other well-behaved evo19
lutionary dynamics. Journal of Economic Theory. 124, 149-170.
Sandholm, W. H., 2005b. Negative externalities and evolutionary implementation. Review of Economic Studies. 72, 885-915.
Sandholm, W. H., 2002. Evolutionary implementation and congestion pricing.
Review of Economic Studies. 69, 667-689.
Sandholm, W. H., 2001. Potential games with continuous player sets. Journal of
Economic Theory. 97, 81-108.
Tabuchi, T., J.-F. Thisse., 2006. Regional specialization, urban hierarchy, and
commuting costs. International Economic Review. 47, 1295-1317.
20
© Copyright 2026 Paperzz