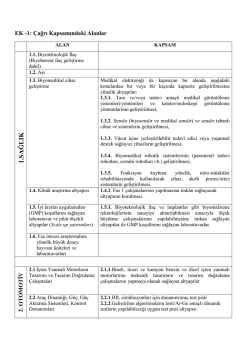
İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEYLER 1. TEMEL ELEKTRİKSEL BÜYÜKLÜKLERİN ÖLÇÜLMESİ, OHM KANUNU VE DİRENCİN ENDÜSTRİYEL UYGULAMASI (STRAIN GAUGE) 2. SAVAK VE VENTURİMETRE DENEYİ 3. JİROSKOPİK MOMENTİN HESAPLANMASI 4. YATAKLARDA SÜRTÜNME KATSAYISININ BELİRLENMESİ 5. LAMİNER VİSKOZ ISI TRANSFERİ 6. FRANCİS TÜRBİNİ 7. STATİK VE DİNAMİK DENGE 8. EĞRİSEL BAR APARATLARI 2013 DENEY RAPORLARININ HAZIRLANMASINDA UYULMASI GEREKEN GENEL KURALLAR 1. A4 boyutunda çizgisiz kağıt kullanılacaktır. 2. Kağıdın sol, üst ve alt taraflarından 3’er cm ve sağ tarafından 2 cm kenar boşluğu bırakılacaktır. 3. Deney raporları mavi tükenmez kalem kullanılarak, okunaklı biçimde el ile yazılacaktır. 4. Cümleler kısa ve imla kurallarına uygun olmalıdır. 5. Ana başlıklardan sonra en fazla iki alt başlık kullanılacaktır. Örnek: 1. Ana başlık 1.1 Alt Başlık 1 1.1.1 Alt Alt Başlık 1 1.1.2 Alt Alt Başlık 2 6. Tablolar ve/veya Şekiller sayfanın başında veya sonunda, sayfaya ortalanmış biçimde yer almalı, metin arasında olmamalıdır. 7. Tablo başlıkları tablo üzerinde, şekil başlıkları ise şeklin altında numaralandırılarak yazılmalıdır. Tablo 1. Deney verileri. 30 Yeni metod ile kestirilen F Yeni metod ile kestirilen F SOL MG Klasik metod ile kestirilen FSOL 25 Klasik metod ile kestirilen F MG Gerçek FSOL Gerçek F MG Kuvvet (N) 20 15 10 5 0 0 10 20 30 40 50 60 70 80 90 100 Hareket süresi (ms) Şekil 1. Kuvvet-Zaman eğrisi 8. Tablo ve/veya Şekiller ile ilgili hesaplamalar uygun programlar (Word, Excel, MATLAB, vb.) kullanılarak hazırlanacaktır. 9. Raporun hazırlanması sırasında kullanılan kaynakların yazımı aşağıda verilen biçime uygun olmalıdır. a. Kaynaklar makale içerisinde atıf sırasına göre köşeli parantez içerisinde [1] şeklinde numaralandırılmalıdır. Kaynaklar bölümü bu sıra ile yazılmalıdır. b. Yararlanılan eserler kaynaklarda gösterilirken aşağıdaki örneklere uygun olarak yazılmalıdır. Yararlanılan eser bir makale ise; 1 [1] Arslan Y, Tan MB, 1997, Kas kuvvetlerinin sonlu elemanlar yöntemi ile analizi, Makine Mühendisliği Dergisi, 21, 1257-1260. Bildiri ise; [2] Arslan Y, Ran NH, 1968, Kas kuvvetlerinin optimizasyon ile analizi, 15. Makine Mühendisliği Kongresi, Eskişehir, Türkiye, 1257-1260. Kitap ise; [3] Arslan Y, Sürmeli C, 2013, Kas kuvvetlerinin analizi, Cengiz Yayınevi, Eskişehir, Türkiye. 2 İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 1 TEMEL ELEKTRİKSEL BÜYÜKLÜKLERİN ÖLÇÜLMESİ, OHM KANUNU VE DİRENCİN ENDÜSTRİYEL UYGULAMASI (STRAIN GAUGE) Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 3 TEMEL ELEKTRİKSEL BÜYÜKLÜKLERİN ÖLÇÜLMESİ, OHM KANUNU VE DİRENCİN ENDÜSTRİYEL UYGULAMASI (STRAIN GAUGE) 1. TEMEL ELEKTRİKSEL BÜYÜKLÜKLERİN ÖLÇÜLMESİ, OHM KANUNU 1.1. Giriş Elektrik devrelerinde temel elektriksel büyüklükler akım ve gerilimdir. Temel devre elemanı ise dirençtir. Devreyi besleyen elektrik kaynakları en genel halde ya doğru akım kaynağı yada alternatif akım kaynağıdır. Beslemenin alternatif akım kaynağı ile yapıldığı devrelerde direnç elemanı artık empedans elemanı olarak isimlendirilir. 1.2. Deney 1.2.1. Deney Düzeneği Gerilim, akım ve direnç ölçülmesi için yapılmış aletlere avometre ya da multimetre adı verilir. DC güç kaynağı, ampermetre ve voltmetre, ve direnç kullanarak aşağıdaki DC devre oluşturulacaktır. 1K A R VDC V 1.2.2. Deneyin Amacı DC devrelerde temel elektriksel büyüklükleri ölçmek, direnç elemanında geçerli olan Ohm kanununu deneysel olarak ispatlama ve bir fiziksel büyüklük olan strain (gerinme)’nin değerini bir ∆R direnç değişikliğine dönüştürerek ölçmektir. 1.2.3. Deneyin Öğrenme Çıktıları Deneyin ilk bölümünde bir tabiat kanunu olan Ohm kanununu deneysel ispatı yapılmaktadır. Bu arada öğrenci akım ve gerilimin ölçme uygulamasını yapmaktadır. 1.3. Teori Ohm kanunu bir elektrik devresindeki direncin uçlarındaki gerilimin içinden geçen akıma oranının her zaman direncin değerine eşit ve bu değerde sabit olduğunu ifade eder. Yani R= V I dir. Ampermetreler devreye seri, voltmetre ise paralel bağlanır. 1.4. Deneyin Yapılışı Ayarlanabilir DC güç güç kaynağını açınız ve voltmetrede 2 Volt okuyana kadar yavaş yavaş arttırınız. Aynı zamanda ampermetre ile ölçülen akım değerini aşağıdaki tabloya kaydediniz. 4 Uyarma: Elde 2 avometre yoksa tek avometreyi hem voltmetre hem de ampermetre olarak kullanınız. Önce gerilim değerini ayarlayıp ölçtükten sonra, avometrenin problarını akım ölçme pozisyonuna getirip akımı ölçünüz. Aynı işlemleri voltmetrede 4 Volt, 6 Volt ve 8 Volt okuyana dek DC kaynağın çıkışını ayarlayınız ve bu değerleri aşağıdaki tabloda kaydediniz. Tablo I R V [Volt] I [Amper] R= 2 4 6 8 V I 1.5. Raporun Hazırlanması Deneyin sonunda hazırlanacak raporda 1. deneyin amacı ve yapılışı anlatılacak. V 2. Ölçüm değerleri yazılarak, tablo hazırlanacak ve R= I olduğu ispatlanacak. 3. Direnç uçlarındaki gerilimin akımla değişimi grafik olarak çizilecektir. 4. Sonuçlar yorumlanacaktır. 2. DİRENCİN ENDÜSTRİYEL UYGULAMASI (STRAIN GAUGE) 2.1. Giriş Cisimler üzerine uygulanan kuvvetler, elastik ve plastik şekil değişimlerine neden olurlar. Kuvvetlerin doğrultu ve yönlerine bağlı olarak cisim üzerinde çekme, basma eğilme, burulma, burkulma ve bunların bileşimi olan gerilmeler oluşur. Bu gerilmeler, malzemenin dayanım değerlerini aşmıyorsa elastik şekil değişimleri gözlenir. Elastik şekil değişim miktarlarının ölçülme yöntemlerinden bir tanesi strain gauge ölçümleridir. Gerinme, uygulanan kuvvet neticesinde cisimde oluşan şekil değiştirme miktarıdır. Diğer bir deyişle boydaki toplam değişim ΔL ’nin, ilk boy L ’ye oranıdır. Gerinme( ) = ΔL L Gerinme pozitif (çekme) veya negatif (basma) değerler alabilir. Gerinme boyutsuz bir büyüklük olmasına rağmen bazen in./in. veya mm/mm gibi birimlerle ifade edilebilir. Pratikte malzemeler üzerinde ölçülen gerinme değerleri çok küçük olduğu için, gerinme genellikle mikro-gerinme ( με ) ile gösterilir. Mikro − gerinme= gerinme× 10 6 Bir malzemede oluşan gerinmeyi ölçmek için çoğunlukla strain gauge kullanılır. Strain gauge, elektriksel direnci, maruz kaldığı gerinmeyle orantılı şekilde değişen bir cihazdır. En çok tercih edileni metalik strain gauge’tir. 5 Metalik Strain Gauge Metalik strain gauge, ızgara şekline getirilmiş bir metalik tel ve bu telin üzerine lehimlendiği bir taşıyıcıdan oluşur. Strain gauge'ler kesiti çok küçük iletken bir telin çok ince bir şerit üzerine tekrarlı sarımlar şeklinde yerleştirilmesinden oluşur. Strain gauge, şekil değişikliği araştırılacak elemana özel bir yapıştırıcı ile yapıştırılır. Hangi eksen doğrultusunda şekil değişikliği (birim uzama) ölçülmek isteniyorsa Strain gauge'in o eksen doğrultusunda yerleştirilmesine özen gösterilir. Yüklemeden sonra yapı elemanının şekil değiştirmesine bağlı olarak strain gauge boyca uzayacak veya kısalacaktır. Bu sırada Strain gauge'ler üzerindeki tellerin çapı değişir. Çapı değişen telin direncide ΔR kadar değişecektir. Strain gauge’in yapıştırıldığı yüzeyin temiz olması gereklidir. Böylece malzeme üzerinde oluşan gerinme doğrudan strain gauge’e aktarılır. Aktarılan gerinme strain gauge’in elektriksel direncinde değişime neden olur. Bir metalik telin elektriksel direnci; ρ telin özdirenci, L telin boyu ve A telin kesit alanı olmak üzere, Elektriksel Direnç(R) = ρ L A formülü ile ifade edilir. Endüstride kullanılan strain gauge’lerin elektriksel dirençleri, 30 ile 3000 Ω arasında değişmektedir. En çok kullanılanları ise 120, 350 ve 1000 Ω dirençli strain gauge’lerdir. Strain gauge’lerin temel parametrelerinden biri de Gauge Faktörü (GF) denilen ve strain gauge’in gerinmeye karşı hassasiyetini ifade eden parametredir. Gauge faktörü, strain gauge’in elektriksel direncindeki değişim miktarının, gerinmeye yani şekil değiştirme miktarına oranıdır. 6 Gauge Faktörü(GF) = ΔR / R ΔR / R = ΔL / L ε 2.2.Deney 2.2.1 Deney Düzeneği 1) Cihazın Genel Görünüşü 2) Aktif Strain Gauge 3) Yardımcı Strain Gauge ve Ölçüm Skalası Şekil 1. İlk şekilde görülen cihazda, 25.4 mm x 3.2 mm kesitli ve elastiklik modülü E= 69000 N/mm2 olan alüminyum çubuk ankastre olarak cihaza mesnetlenmiştir. İkinci şekilde görülen strain gauge, alüminyum çubuğun yüzeyine, serbest ucundan 150 mm uzaklıkta bir noktada yapıştırılmıştır. Alüminyum çubuğun serbest ucuna uygulanan yükün, strain gauge’in yapıştırıldığı noktada meydana getirdiği gerinme, üçüncü şekilde görülen skaladan okunmaktadır. İkinci şekildeki strain gauge ve üçüncü şeklin sol üst köşesinde görülen strain gauge, Wheatstone köprüsüne ait R4 ve R3 dirençleridir. İlk strain gauge doğrudan gerinmeye maruz kaldığı için aktif, ikincisi ise maruz kalmadığı için yardımcı strain gauge olarak adladırılmıştır. Strain gauge’lerin elektriksel direnci 120 , gauge faktörü ise GF=2.12’dir. 7 2.2.2. Deneyin Amacı Gerinme (strain) fiziksel büyüklüğü strain gauge denilen bir dönüştürücüde ∆R direnç değişikliğine dönüştürülmekte buda Wheatsone köprüsü denilen bir elektrik devresinde gerilime dönüştürülerek gerinme ölçülebilir hale getirilmektedir. 2.2.3. Deneyin Öğrenme Çıktıları Bu deneyle öğrenci bir sensör (algılayıcı) kavramı kazanmaktadır. Böylece bir fiziksel büyüklük (strain, basınç, sıcaklık, akış v.s.) bir düzenekle elektriksel büyüklüğe (akım, gerilim, frekans v.s.) çevrilmektedir. Bir fiziksel büyüklük elektriksel büyüklüğe çevrildiğinde artık üzerinde işlenebilir, uzağa gönderilebilir v.s. demektir. 2.3. Teori Strain gauge üzerinde bulunduğu malzemenin maruz kaldığı gerinme ile orantılı bir ΔR direnç değişikliği meydana getirmektedir. İşte bu direnç değişikliği Wheatsone köprüsü denilen bir düzenekle gerilim değişikliğine bu da uygun ölçeklendirme (skala) ile ibreli aletle ölçülmektedir. Wheatsone köprüsü bir DC gerilim kaynağı V EX ve 4 koldaki dirençleri ile aşağıdaki gibi oluşturulur. B A V A noktasının gerilimi bir gerilim bölücü özelliği kullanılarak VEx R3 dir. Aynı şekilde V B noktasını gerilimi yine gerilim bölücü özelliği R3 + R4 VEx kullanılarak VB = R2 dir. V 0= V A − V B olduğundan R1 + R2 VA = R3 R2 Vo = V EX R3 + R4 R1 + R2 çıkış gerilimini veren bağıntı bulunur. Bu denkleme göre karşılıklı kollar çarpımı birbirine eşit olursa R1 R 3= R2 R 4 veya R1 / R 2= R 4 / R 3 olduğu zaman, çıkış voltajı sıfır değerini alır ve “köprü dengededir” denir. Söz konusu elektriksel dirençlerden birinde herhangi bir değişim olduğunda, çıkış voltajı sıfırdan farklı bir değer verecektir. Eğer köprüye R4 ’ün yerine bir strain gauge yerleştirirsek, strain gauge’in elektriksel direncindeki herhangi bir değişim köprünün dengesini bozacak ve V o ’nun sıfırdan farklı bir değer almasına neden 8 olacaktır. RG strain gauge’in elektriksel direncini göstermek üzere, direncin değişimi ΔR , gauge faktörü bağıntısı kullanılarak ΔR = RG GF ε ile ifade edilebilir. İdeal bir strain gauge’in elektriksel direncinin sadece tutturulduğu yüzeyde meydana gelen deformasyonlar ile değişmesi gerekir. Fakat gerçek uygulamalarda, sıcaklık, malzeme özellikleri, strain gauge’i malzeme yüzeyine bağlayan yapışkan madde ve metalin kararlılığı gibi faktörler ölçülen elektriksel direnci etkiler. Çünkü çoğu malzemenin özellikleri bütün yönlerde (x,y,z) aynı değildir. Bu nedenle eksenel gerinmenin tek başına ölçümü tam bir analiz için yeterli değildir. Poisson, eğilme ve burulma gerinmelerinin de ayrıca ölçülmesi gerekir. Strain gauge’ler, dünya çapında endüstrinin her alanında artan bir hızla ve birçok uygulamada kullanılmaktadır. Örneğin; Kantar, tartı, depo ve araçlardaki yük hücresinde Köprüler ve binalar gibi yapıların denetiminde Otomotiv, uzay, ilaç, proses, petrol ve gaz ve güç üretimi sanayilerindeki ar&ge uygulamalarında Ve hemen hemen endüstrinin diğer tüm alanlarında Yapılan deney süresince alüminyum çubuk sadece eğilmeye maruz kalmaktadır. Eğilme teorisine göre; basit eğilmeye maruz kalan bir çubuğun, naturel ekseninin boyunda herhangi bir değişim olmaz. Eğilme Teorisine Göre Teorik Gerinmenin Hesabı Bir çubuğun eğilme etkisi altındaki elastik davranışı, aşağıdaki şekilde şematik olarak gösterilmiştir. Δθ M A y C y B M D r Çubuğun yandan görünüşü Çubuğun üst kenarındaki lifler çekme gerilmesine uğradığından uzar, alt kenarındaki lifler ise basma gerilmesine uğradığından kısalır. Çubuğun CD ile gösterilen naturel ekseni ise teoriye göre eğilmeden önceki boyunu korur. Gerinme ölçümü alüminyum çubuğun sadece üst kenarında yapılacaktır. Bu yüzden gerekli olan büyüklük, AB yayındaki şekil değiştirme miktarıdır. ΔL = AB CD = r + y Δθ r Δθ = y Δθ şeklinde ifade edilebilir. Çubuğun üst kenarında oluşan gerinme, uzama miktarının ilk uzunluğuna oranı olduğundan; 9 ε= ΔL y Δθ y = = L R Δθ r şeklinde ifade edilebilir. Eğilme teorisinden aşağıdaki eşitlik yazılabilir. E M σ = = r I y Bu eşitlikte; E malzemenin elastiklik modülünü, r eğrilik yarıçapını, M uygulanan eğilme momentini, I çubuğun kesitinin alan atalet momentini veya ikinci alan momentini, cisimde oluşan eğilme gerilmesini ve y çubuğun dış kenarından naturel eksene olan uzaklığı ifade etmektedir. Eğilme bağıntısının ilk eşitliğini kullanarak; 1 M = bağıntısı elde edilir. Her iki taraf y ile r EI y My = eşitlğine ulaşılır ki, r EI karşılaştırılacağı bağıntı bulunur. çarpılırsa; Gerinme( ) = ε= y r olduğundan ölçüm sonuçlarının My EI 2.4.Deneyin Yapılışı Cihazın elektrik bağlantısı yapılır. Ölçüm skalasının alüminyum çubuk üzerinde herhangi bir yükün olmadığı durumda sıfırı göstermesi için yanındaki düğme (set zero) ile ayar yapılır. Yük askısı asılır. Ölçüm skalasında oluşacak değişim nedeniyle skala yine sıfırlanmalıdır. Yük askısına 5 N’luk yük yerleştirilir ve ölçülen değer tablonun artan yük sütununa yazılır. Aynı işlem 5’er N’luk artımlarla 25 N’luk toplam yüke kadar yapılır. 25 N’luk yük için yapılan ölçüm değeri azalan yük sütununa da yazılır. Bundan sonra 5’er N’luk yüklerin, yük askısından tek tek alımıyla ölçülen değerler azalan yük sütununa yazılır. Son 5 N’luk yükün alımı ile ulaşılan sıfır yük için ölçüm skalasında okunacak değer sıfır veya sıfıra çok yakın bir değer olmalıdır. Eğer değer 30 με’dan büyük ise deney en başından tekrarlanır. 10 Yük (N) Artan Yük Gerinme Direnç Değişimi ( με ) ( ΔR ) Azalan Yük Gerinme Direnç Değişimi ( με ) ( ΔR ) Teorik Gerinme ( με ) 0 5 10 15 20 25 2.5.Raporun Hazırlanması Deneyin sonunda hazırlanacak raporda 1. Deneyin amacı ve yapılışı anlatılacak. 2. Teorik gerinme değerlerini hesaplayın. 3. Her bir yük için strain gauge’in elektriksel direncinde oluşan direnç değişimlerini hesaplayın. 4. Ölçüm sonuçlarına hesapladığınız değerleri de ekleyerek yukarıdaki tabloyu hazırlayın. 5. Tablodan yararlanarak gerinme – yük grafiklerini hazırlayın. Deneysel grafikte artan ve azalan yük için bulduğunuz değerlerini birlikte kullanın. Yani her ikisini tek bir grafikte gösterin. Hesapladığınız teorik değerleri ayrı bir grafikte gösterin. Not: R1 = R2 = R3 = R4 = R yazarak ve R1 de ΔR direnç değişikliğini devreye sokarak V0 ΔR = olduğunu gösteriniz. VEX 4R 2.6.Kaynaklar 1. Strain Gauge Measurement – A Tutorial.pdf, National Instruments, Application Note 078 2. http://www.omega.com/literature/transactions/volume3/strain.html 3. http://www.strain-gauges.com/index.htm 11 İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 2 SAVAK VE VENTURİMETRE DENEYİ Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 12 SAVAK VE VENTURİMETRE DENEYİ 1. Giriş Birçok mühendislik uygulamasında sisteme giren veya çıkan akışkanların bazı değerlerinin ölçülmesi ve kontrol edilmesi önemlidir. Ölçülmesi istenen değerlerin en önemlileri akışkanın sıcaklığı, hızı ve debisidir. Akışkanlar mekaniğinde akışkanın konumu, hızı ve basıncı arasında doğrudan bir bağıntı veren Bernoulli denkleminin birçok uygulamasından biri de akışkanlardaki hız ve debi ölçüm yöntemlerinin teorik yapısını oluşturmasıdır. Akışkanlar Mekaniği ve Isı Transferi uygulamalarında sıklıkla karşılaşılan fiziksel büyüklüklerden bir tanesi de “Akış Debisi” dir. Gerek içinde akışkan bulunan sistemlerin tasarımında, gerekse de iyileştirilmesinde ve bakımında debi ölçümleri önemli bir yer tutmaktadır. Bir boru veya kanal içinden geçen akışkan miktarı, birim zamandaki kütle (Kütlesel Debi, kg/h, kg/s) veya birim zamandaki hacim (Hacimsel Debi, m3/h, m3/s) cinsinden değişik metotlarla ölçülebilmektedir. Ölçüm yönteminin seçiminde ise akışkanın içinde hareket ettiği kanalın yapısı önemlidir. Akışkanlar boru ve kanal içinde ya da açık kanallarda hareket edebilirler. Boru ve kanallar içindeki akışta boru veya kanal tamamen kapalı ve gaz ya da sıvı bir akışkanla doludur. Açık kanallarda akışta ise akışkan sadece sıvı ve kanal tamamen dolu değildir, akan akışkan ile üzerindeki akışkan (genelde atmosfer) arasında her zaman bir serbest sıvı yüzeyi vardır. Bu yüzey, üzerindeki akışkanın basıncı etkisindedir ve şekil değiştirebilmektedir. Açık kanallarda akışkan yükseklik farkından gelen potansiyel enerjisini kinetik enerjiye çevirerek eğim yönünde akar, dolayısıyla akışın gerçekleşmesi için kanal yatağı eğimli olmalıdır. Açık kanallarda basınç, serbest yüzeyde atmosfer basınç kanal içinde ise hidrostatik basınçtır, atmosfer basıncı serbest yüzeyin boyunca sabit olacağından açık kanallarda basınç gradyanı ancak derinlik farkı nedeniyle oluşur. Boru ve kanal içinde akışta ise akışkan basınç kuvvetleri, makineler tarafından uygulanan kuvvetler ve yerçekimi kuvvetleridir, açık kanallarda basınç sadece hidrostatik olabiliyorken boru akımlarında kompresör, pompa gibi makineler tarafından çok büyük basınç farkı yaratılabilir bu sayede akışkan yüksek hızlara ulaşabilir. Bu durum her iki akış arasındaki en büyük farktır. Açık kanallar için birçok örnek verilebilir. Doğal açık kanallar akarsular, haliçler ve sel yataklarıdır. Yapay açık kanal örnekleri ise su kanalları, taşma savakları, kanalizasyon ve arklar örnek verilebilir. Enerji gradyanı Enerji gradyanı Hidrolik gradyan Akış ekseni Su yüzeyi Kanal yatağı (a) Açık kanalda akış (b) Kanal içinde akış Şekil 1. Kanal içi ve açık kanal akışları Her iki türdeki akış Şekil 1 ‘de gösterilmiştir. Solda boru ve kanal içinde akış görülmektedir. 1 ve 2 kesitlerine birer adet piyezometre yerleştirilmiştir, ölçüm yapılan noktalardaki basınca bağlı olarak piyezometre borularındaki su yükseklikleri hidrolik gradyanda gösterilmiştir. Her kesitte su tarafından uygulanan basınç nedeniyle boruda oluşan su sütünü ile akış eksen arasında mesafe y kadardır. Her bir kesitteki akışın enerjisi akış ekseninin yüksekliği (z), piyezometrik yükseklik (y), V kesitteki ortalama hız olmak üzere V2/2g bileşenlerinden oluşmaktadır ve toplamları enerji gradyanı üzerinde gösterilmiştir. Akışkanın 1. kesitten 2. kesite akmasıyla oluşacak enerji kaybı ise şekilde hf ile gösterilmiştir. Benzer bir şekil düzgün dağılımlı hız profilli paralel akış ve kanal eğiminin çok küçük olduğu kabulleriyle açık kanalda akış için şekil 1’de sağda çizilmiştir. Bu durumda açık kanaldaki hidrolik gradyan su yüzeyi olmakta ve su yüksekliği de piyezometrik yüksekliğe denk gelmektedir. Yapılan kabuller altında her iki akış tipi arasındaki benzerliğe rağmen gerçekte açık kanallardaki problemleri çözmek kanal içindeki akış problemlerini çözmekten çok daha zordur. Açık kanallardaki akış koşulları serbest yüzeyin şeklinin, kanal derinliğinin (yatak profili değişimleri) ve kanal yatağının eğiminin zamanla ve konumla değişmesinden dolayı karmaşıklaşmaktadır. Şekil 2. Üçken kesitli kanal Şekil 3. Dar kesitli dikdörtgen kanal Şekil 4. Doğal düzensiz kanal kesiti 14 Şekil 2,3 ve 4’ de değişik kesitlerdeki düz kanallardaki hız kontürleri görülmektedir. Hızın en büyük değerini aldığı bölge, yatağın en derin yerinin orta ekseninde, yüzeyden kanal derinliğinin yaklaşık %20’si kadar aşağısındadır. Açık kanallarda akışın çözümlenmesinde mühendislik yaklaşımıyla bir boyutlu akışı incelemek daha pratik olacaktır. Akışkan yoğunluğunun sabit olduğu kabul edilirse kanal boyunca sabit hacimsel debide akış olacaktır. Denklem 1 de V kesitteki ortalama hızı, A ise kesitteki akışa dik kesit alanı göstermektedir. Q = V(x) A(x) = sabit (1) Enerji Gradyanı Eğim=Sf Eğim=S0 Yatay referans Şekil 5. Açık kanalın tek boyutlu incelenmesi Tek boyutlu incelemedeki bir başka bağıntı da kayıpların da dahil edildiği enerji denklemidir. Kanal yatağının eğimi incelenen bölgede sabit olmak üzere S0 = z1 -z 2 / dir. y ve V sırasıyla sıvı derinliği ve hızıdır. Kanalın herhangi bir kesitinde düzgün dağılımlı hız profili olduğunu kabul edersek. P12 V12 P2 V2 + z1 = 2 2 + z 2 + h L 2g 2g (2) Denklem (2) de hL viskoz etkiler nedeniyle 1. ve 2. kesitler arasındaki kayıpları göstermektedir. Şekilde görüleceği üzere z1 -z 2 S0 olarak gösterilebilir. Her iki kesitin serbest yüzeyindeki basınç, atmosfer basıncına eşit olduğundan P1 ve P2 basınçları hidrostatik basınç alınabilir, bu durumda da ( P1 / = y1 ), ( P2 / = y 2 ) olacaktır. Denklem (2) yeniden düzenlenirse y1 V12 V2 + S0l = y2 2 + h L 2g 2g elde edilir. 15 (3) 2. Deney 2.1. Deney düzeneği IV III I II Şekil 11. Deney düzeneğinin açma kapama ünitesi Şekil 12. Ölçüm aleti ve dikdörtgen savak V VII VI Şekil 13. Ölçüm havuzu Şekil 14. Sıvı hacim göstergesi VIII (I) Pompa açma-düğmesi (II) Ana vana (III) Savak levhası (IV) Ölçüm aleti (V) Tapa (VI) Ölçüm havuzu (VII) Sıvı hacim göstergesi (VIII) Kontrol vanası Şekil 15. Rotametre 16 2.2. Deneyin amacı İlk olarak deney düzeneği üzerinde debi ölçüm yöntemi tanıtılarak uygulama yapılacaktır. İkinci olarak da deneyde açık kanallardaki hacimsel debinin ölçümünde kullanılan değişik profillerdeki savakların hacimsel debi ifadeleri bazı kabuller yapılarak elde edilmekte daha sonra deney sırasında elde edilen gerçek değerlerden yola çıkarak yapılan kabullerin teorik değerler üzerindeki etkisi incelenmektedir. Teorik ifadelerden elde edilen sonuçların gerçek hayatta da kullanılması için düzeltme katsayıları önerilecektir. 2.3. Deneyin öğrenme çıktıları Akışkanlar Mekaniğindeki en önemli ölçüm konularından biri olan debi ölçümü hakkında uygulamalı bilgilerin verilmesi. Debi ölçüm sistemlerinin hassasiyetinin araştırılarak birbirlerine göre kıyasının yapılması. 3. Teori Boru içindeki akışta kesit değişimlerinin hız ve basınca etkisi bilinmektedir. Kesitin daralması halinde basınç azalmakta, buna karşılık dar kesitten aynı miktarda kütlenin geçebilmesi için (Süreklilik denklemi gereği) hız artmaktadır. Tersi durumda, yani kesitin genişlemesi halinde ise basınç artmakta, hız ise düşmektedir. Dolayısıyla, kesiti değişen bir boru içindeki akışkanın basıncı ölçülerek hızlara, hızlar kullanılarak da debiye geçilmesi mümkün olmaktadır. Aşağıdaki şekilde tipik bir venturimetre borusu ve deney düzeneği ile birlikte gösterilmiştir. 1 2 Şekil 2: Ventrümetre Borusu Venturimetre içindeki kesit değişimleri ve viskoz kayıplar ihmal edildiğinde, basınçtaki değişim sadece hız değişiminin fonksiyonu haline gelmektedir. Bu durumda Bernoulli Enerji Denklemi; 17 U 12 U2 U2 h1 2 h2 ........... n hn 2g 2g 2g şeklindedir. Burada U akışkan hızını göstermektedir. Akışkanın bir sıvı olması halinde, sıkıştırılamama özelliğini kullanarak süreklilik denklemi; U1 .A1 U 2 .A2 ....... U n .An Q şeklinde ifade edilebilir. Burada Q hacimsel debidir. Bernoulli Denklemi ve Süreklilik Denkleminin ortak çözümü ile; 2 U 22 A2 U 22 h1 h2 2 g A1 2g elde edilir. Buradan U2 çözülürse; U2 2 g h1 h2 A 1 2 A1 2 elde edilir. Hacimsel debi ise; Q A2 2 g h1 h2 A 1 2 A1 2 olmaktadır. Uygulamada, 1 ve 2 nolu kesitler aralarında bir miktar enerji kaybı olur ve sonuç olarak Q’nun ölçülen değeri, yukarıdaki denklemden elde edilen değerden daha düşük olur. Bu nedenle teorik sonuç bir düzeltme katsayısı (C) ile çarpılarak gerçek debi hesaplanır. Bu değer genellikle çok değişken olmakla beraber, hesaplarda 0.92-0.99 arasında seçilir. En Küçük Kareler Metodu: Y a bx ise, y.x a nx 2 2 x.xy x.x b xy y.x nx 2 x.x formüllerinden hesaplanır. 18 Açık kanaldaki akışlarda belirli bir akış kesiti oluşturarak, bu kesitten geçen akışkan miktarına göre akışkan debisinin ölçülmesini sağlayan savak profilleri kullanılır. Savak yükü ile akışkan debisi arasındaki ilişki önemlidir. Savak Levhası PW Şekil 6. Düz profilli savak Savak Levhası PW Şekil 7. Üçgen profilli savak Savak Levhası PW Şekil 8. Dikdörtgen profilli savak Savaklar kanal eksenine dik ve kanalın içine yerleştirilen setler olup, akışı saptırarak sıvının kendi üzerinden akmasını sağlarlar, bir miktar sıvı savağın arkasında birikir. Savağın akış başlangıç noktası üzerindeki sıvı yüksekliği olan H ile akışın hacimsel debisi arasında ilişki kurulabilir. Tek bir ölçüm yapılarak (H’ın ölçülmesi) debinin bulunabilmesi savakları basit ama etkili bir debi ölçüm aracı kılar. Savak profilinin seçimi ölçüm yapılacak debi aralığına ve H değerinin bu aralıkta hassas okunabilmesine göre değişir. Küçük debilerde H ’ın değeri, dikdörtgen profilli savaklarda üçgen profilli savaklara göre daha küçük olacaktır ve hassas ölçüm yapılamayacaktır, üçgen savakta ise hem küçük hem de yüksek debilerde hesaplamalar için yeterli hassasiyette yükseklikler ölçülebilir. 19 Enerji Gradyanı Serbest yüzey ve hidrolik gradyan Savak akış başlangıç noktası Şekil 9. Savaktaki akışın incelenmesi Şekil 9’ da keyfi olarak seçilmiş bir akım çizgisi üzerinde kanal içindeki savaktan önce gelen A noktası ve savak üzerinde B noktası gösterilmektedir. Kanalda savaktan önceki akışın hız profilini düzgün dağılımlı ve akışın atmosferik basınç etkisinde olduğunu, savağın levhasının üzerinden geçen akışın yatayda aktığını ve düzgün olmayan hız profili dağılımı olduğunu kabul edersek, PB=0 olmak üzere Bernoulli denklemi kayıp ifadesi olmadan şu şekilde yazılabilir. PA V12 u2 + z A = 2 H + Pw h 2g 2g (4) B noktasında savağın üzerinde akan akışkanın daha önceki konumu olan A noktasının yeri bilinmemektedir ama A noktasının bulunduğu düşey kesitteki (1) herhangi bir nokta, Bernoulli denkleminde aşağıdaki gibi gösterilebilir. ( Şekil 9. daki enerji seviyesi incelenmelidir.) PA V12 V2 + z A = H + Pw 1 2g 2g (5) Bu durumda denklem (4) aşağıdaki gibi sadeleşir ve savağın üzerindeki akışkan hızını veren ifade elde edilir. V2 u 2 = 2g h+ 1 2g (6) Hız ifadesi bulunduktan sonra her profildeki savak için hacimsel debi, hız ifadesi ve savak üzerindeki akış alanının (2) entegrasyonundan bulunabilir. h=H Q= (2) u 2 dA= 20 h=0 u 2 l dh (7) l l (h) incelenen diferansiyel alandaki savak genişliğidir ve savağın profiline göre h ‘ın fonksiyonu olarak değişir. (Şekil 9) Şekil 8. de gösterilen dikdörtgen profilli savak için l =b (savak genişliği) sabittir. Bu durumda denklem (7) deki hacimsel debi ifadesi 1/2 H V12 Q = 2g b h+ dh 2g 0 3/2 3/2 V12 V12 2 Q= 2g b H+ 3 2g 2g (8) (9) Denklem (9) bazı kabuller yapılarak sadeleştirilerek daha kullanışlı bir ifade bulunabilir. Savak profilinden bağımsız olarak, savak yüksekliği (PW), savak akış başlangıç noktası üzerindeki sıvı yüksekliğinden (H) gerçekteki uygulamalarda genellikle çok büyüktür ( PW H ) ve kanalda savaktan önceki akış hızı (V1) ihmal edilebilecek kadar küçüktür. Bu kabuller altında V12 / 2 g H olur ve denklem (9) sadeleştirilir. Q= 2 2g b H 3/2 3 (10) Üçgen profilli savaklarda savak genişliği h ‘ın fonksiyonu olmakla birlikte üçgen savağın profil açısı olan θ ya da bağlıdır. l = 2 H-h tan 2 (11) Denklem (7) üçgen profilli savak için uygulanır ve dikdörtgen profilli savağa uygulanan sadeleştirme yapılırsa ( V12 / 2 g H ), üçgen profilli savak için hacimsel debi ifadesi elde edilir. Q= 8 t an 2 g H 5/ 2 15 2 (12) H savak akış başlangıç noktası ile serbest yüzey arasındaki mesafedir. Savak düşey ekseninde savağın üzerinde akmakta olan sıvının serbest yüzeyi ile savak tepe noktası arasındaki mesafe değildir. Kesinlikle savağın hemen üzerinden yapılan ölçümler hesaplamalarda kullanılmamalıdır. Denklem (10) ve (12) yi elde ederken yapılan kabullerden dolayı denklemlerin sonuçları gerçek debi değerini vermeyecektir. Deneysel olarak bulunan düzeltme faktörü (CWR) kullanılarak gerçek hacimsel debiyi savak üzerindeki sıvı yüksekliğinin fonksiyonu olarak veren ifadeler elde edilir. 21 2 2g b H 3/2 3 8 Q = C WR t an 2 g H 5/ 2 15 2 Q = C WR (13) (14) CWR savak katsayısıdır ve değişik profillerdeki savaklar için farklı değerler alır, değeri her savak profili için yapılan deneyler sonuçlarında hazırlanmış tablo, grafik ya da denklemlerden bulunabileceği gibi mevcut duruma göre deneysel de hesaplanabilir. CWR katsayısı Reynolds sayısının (viskoz etkiler), Weber sayısının (yüzey gerilme etkileri) ve H/PW oranının (savak geometrisi) fonksiyonudur. Uygulamadaki pek çok durumda Reynolds ve Weber sayılarının etkileri ihmal edilebilir. Dikdörtgen ve üçgen profilli savak için elde edilen hacimsel debi ifadelerine (Denklem (13) ve (14)) dikkat edilirse her savak için hacimsel debi ifadesinin Q = kH n log Q = log k + n log H (15) (16) denklem (15) e benzer bir şekilde genelleştirilebileceği görülür. k ve n savak profiline özgü katsayılardır. Şekil 10. 4. Deneyin yapılışı Deneye başlamadan önce aşağıdaki hususlara dikkat etmek gerekmektedir. Pompayı çalıştırmadan önce depoda su olduğundan, ana vananın ve kontrol vanasının açık olduğundan emin olunuz. Ölçüm aletinden okunan değerler sadece ölçüm yapılan yerin düşey eksendeki koordinatını belirlemek içindir. İki koordinat arasındaki fark gerçek mesafeyi verecektir. 22 Ölçüm aletinin ucundaki iğne suya değdiği anda su yüzeyinde halka oluşacaktır. Ölçümler halka oluştuğu anda yapılmalıdır. Yüzeyde ölçümün hassasiyetini bozacak kadar dalgalanma varsa debi kontrol vanası aracılığı ile değiştirilmelidir. Deneyin I. kısmında izlenecek yol, 1. Hidrolik tezgâhtan venturimetre borusuna giden su kontrol vanası açılarak akışın baskülün belirli bir yüksekliği için gerçekleşmesi sağlanır. 2. Akışkan biriktirme haznesi plastik boru tıkacı ile kapatılır. 3. Haznedeki su seviyesi sıfır çizgisine gelince kronometre çalıştırılarak 5,15 ve 25 litrelik dolumlar için geçen süreler ve bu değerlere karşılık gelen baskül yükseklikleri okunur. 4. Piyezometre değerleri kaydedilir. 5. Bu işlem farklı debiler için tekrarlanır. 6. Baskül yüksekliği ve ortalama debi arasında bir bağıntı bulunmaktadır. Qort a hbaskül 7. a katsayısını En Küçük Kareler Metodu’nu kullanarak tespit edilir. Böylece baskül değeri okunarak debi miktarı ölçülmüş olur. Deney II. kısmında izlenecek yol sırasıyla şu şekildedir, 1) Ölçüm yapılacak savak levhasını Şekil 12’de görüldüğü gibi yuvasına takılır. 2) Pompa, düğme (Şekil 12) çevrilerek çalıştırılır. Savaktan su akmaya başladıktan sonra pompa düğmenin üstüne basılarak kapatılır. Savak akış başlangıç noktasından su akışı kesildiği anda su yüzeyinin düşey eksendeki koordinatı, ölçme aleti ile belirlenir. Ölçülen değer elinizdeki savak için referans değer olacak diğer ölçüm değerleri bu referanstan çıkarılınca H değeri elde edilecektir. 3) Tercihen 5 farklı debide H ve ölçüm havuzun dolma süresi ölçülmelidir, ilk ölçüme en yüksek debide başlanmalıdır (kontrol vanası sonuna kadar açık) . a. Debi, rotametre üzerindeki kontrol vanasıyla (Şekil 15) ayarlandıktan sonra tapa yerine takılır. b. Sıvı hacmi göstergesinden (Şekil 14) takip edilerek 0-15 litre arasındaki dolma süresi ölçülüp kaydedilir. Sıvı hacminin dolma süresine bölümü bize deneysel debiyi verecektir. c. Sıvı hacmi göstergesi 7-8 litre civarında iken ölçüm aleti (Şekil 12) ile serbest su yüzeyinin düşeydeki koordinatı ölçülüp kaydedilir. d. 15 litrelik dolumdan sonra tapa (Şekil 13) açılarak ölçüm havuzundaki su boşaltılır. e. Diğer debiler için 3-a dan 3-d ye kadar olan işlemler tekrarlanır. 4) Pompa kapatılır, ölçümleri biten savak levhası yerinden çıkarılır, yerine ölçüm yapılacak savak levhası takılır. İşlemler 2. adımdan 4. adıma kadar tekrarlanır. 23 5. Raporun hazırlanması Deneyin sonucunda hazırlanacak raporda, 1. Deneyin amacı ve yapılışı kısaca anlatılacaktır. 2. Farklı debi ölçümlerindeki teorik debi değerleri hesaplanacaktır. 3. a katsayısı hesaplanacaktır. 4. Teorik debi değerleri ile ölçülen debi değerleri karşılaştırılacaktır. 5. Deneysel debinin teorik debiye oranı olan venturimetre katsayısı (C) hesaplanacaktır. 6. Deneyin II. kısmındaki ölçüm sonuçlarından hesaplamalar yapıldıktan sonra aşağıdaki tablolar ve grafikler hazırlanıp, deney raporuyla birlikte teslim edilecektir. 7. Her savak için Tablo 1 doldurulacaktır. Tablo 1. Deney ölçüm verileri Savak Profili: Savak akış başlangıç noktası koordinatı: Dolum Hacmi [litre]: Serbest sıvı Ölçüm havuzu Ölçüm yüzeyi koordinatı dolum süresi [s] 1 2 3 4 5 CWR değerlerinin aritmetik ortalaması: H [m] Qdeneysel.104 [m3/s ] CWR 8. Her savak için Qdeneysel–H ve Q-H eğrilerini aynı grafik üzerinde verilecek (Grafiğin anlaşılır olması için debi ekseni Q.104 olarak hazırlanacaktır.). 9. Her savak için log Qdeneysel–log H ve log Q–log H eğrilerini aynı grafik üzerinde çizilecektir. 10. Her savak için çizilecek logaritmik grafik üzerindeki noktalardan en yakın geçen doğrunun denklemi elde edilerek, bu doğru denklemlerinden k-n ‘in deneysel ve teorik sonuçları karşılaştırılıp her iki durum için de denklem (15) benzeri ifadeler elde edilecektir. 11. Sonuçlar yorumlanacaktır. 7. Raporların hazırlanması sırasında okunabilecek ek kaynaklar Konu ile ilgili geniş bilgi bulunabilecek bazı web adresleri; http://www.usbr.gov/pmts/hydraulics_lab/pubs/wmm/indexframe.html http://www.lmnoeng.com/Weirs/vweir.htm http://www.it.iitb.ac.in/vweb/engr/civil/fluid_mech/section3/bernoulli-apps.htm 24 İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 3 JİROSKOPİK MOMENTİN HESAPLANMASI Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 25 JİROSKOPİK MOMENTİN HESAPLANMASI 1. Giriş Jiroskop, simetri eksenine sahip ve simetri ekseni etrafındaki dönme hızı, herhangi başka bir eksen etrafındaki dönme hızından göreceli olarak büyük olan kütleye sahip sistem olarak tanımlanabilir. İsmi, sistemi 19. yüzyılda keşfeden fizikçi Jean-Bernard-Lon Foucault tarafından verilmiştir. Çerçeve sisteminin pozisyonu değişmiş olsa dahi dönen rotorun oluşturduğu açısal momentum rotorun konumunu korumasını sağlar. Foucault gerçekleştirdiği deney ile dönen bir tekerleğin sahip olduğu yönü, dünyanın kendi ekseni etrafındaki dönüşünden etkilenmeksizin koruduğunu göstermiştir. Foucault'un bu keşfi birçok alanda faydalı uygulamalar yapılmasını sağlamıştır. Elektrik ile çalışan jiroskop içeren pusula denizaltıların yön bulma sisteminde kullanılmaktadır. Geleneksel pusula gibi metalden etkilenmemektedir ve manyetik kuzeyi değil gerçek kuzeyi göstermektedir. Gemi ve uçakların otomatik pilot sistemlerinin vazgeçilmez elemanlarından biridir. Jiroskopların yüksek bir hassasiyet ile yön belirleme yeteneklerinin karmaşık kontrol mekanizmaları ile bir araya gelmesi sonucu gemi üzerindeki silahların ve füzelerin hedefe kesin bir şekilde yönelmelerini sağlayan sistemler geliştirilmiştir. Uzay mekiklerinde kullanılan ve küçük bir platformun olağanüstü hassasiyet ile dengede tutulmasını gerektiren ataletsel yönlendirme sistemleri jiroskoplar ile çalışmaktadır. Şekil 1. İki ve üç çerçeveli jiroskop sistemleri 2. Deney 2.1. Deney düzeneği Jiroskop deney seti, jiroskop sistemi ve yedek rotoru üzerinde bulunduran jiroskop cihazı, presesyon ve rotor hızlarının farklı değerlere ayarlanmasını sağlayan hız kontrol üniteleri ve sayısal takometre'den (hızölçer) oluşur (Şekil 2). Sayısal takometre rotor hızının ölçülmesinde kullanılır. Şekil 2. Jiroskop deney seti 2.2. Deneyin amacı Sisteme eklenen kütleler sonucu bozulan dengeyi sağlayacak rotor ve presesyon hızlarının ölçülmesi, sabit rotor hızındaki tork-presesyon ve sabit presesyon hızındaki tork-rotor hızı arasındaki ilişkilerin belirlenmesidir. 2.3. Deneyin öğrenme çıktıları Bu deneyin sonucunda jiroskopik hareketin nasıl oluştuğu nerelerde karşılaşılabileceği ve jiroskopik kuvvet çiftini hesabı hakkında bilgi edinilecektir. 3. Teori 3.1 Jiroskobik Kuvvet Çiftinin (Tork) Hesaplanması Belirli bir açısal hız ile dönen disk, ağırlığının oluşturduğu tork (burulma momenti) tarafından belirlenen yönde presesyon hareketi gerçekleştirir (Şekil 3.1). Diskin açısal hızı ile presesyon açısal hızı birbiri ile ters orantılıdır. Presesyon hareketi, bir dizi matematiksel ve fiziksel tanım ile açıklanabilir. Bunları şu şekilde sıralayabiliriz. Diskin açısal momentumu ( L ), diskin kütle atalet momenti ( I ) ile açısal hızının ( ) çarpımına eşittir. L I (1) 27 Diskin ağırlığının oluşturduğu tork (τ), diskin ağırlığının diskin kütle merkezi ile destek noktası (Şekil 3.b'da F noktası) arasındaki mesafenin çarpımına eşittir ve etkime noktası kütle merkezidir. F f τ = mgf f D ΔL Δt mg F E (a) (b) Şekil 3. Jiroskobik hareket Tork, açısal momentumun zamana bağlı değişim oranına ( L / t ) eşit olduğu için, presesyon hareketi ile tork arasında bir ilişki kurabiliriz. Presesyon açısının değişim oranı, açısal momentumun değişim oranı ile ve dolayısıyla tork bakımından ifade edilebilir. Presesyon hareketi açısal hızının tarifi, diskin açısal hızının ( ), presesyon hareketinin açısal hızından ( p ) göreceli olarak büyük olduğu durum için geçerlidir. Diskin açısal hızının presesyon açısal hızına oranı ( / p ) küçüldükçe disk yalpalamaya başlar ve presesyon hareketi daha karmaşık denklemler ile ifade edilmeye başlanır. Presesyon hareketinin açısal hızı, p t (2) formülü ile ifade edilir. Şekil 3.a’ daki ABC üçgeninden; L L sin( ) L : Diskin açısal momentumu, kgm/s² : Diskin presesyon hareketi sırasındaki açısal konumu, rad : Diskin ekseninin düşey eksen ile yaptığı açı, rad 28 (3) Yine şekil 3.a’daki DEF üçgeninden; mgf sin( ) p L t L mgf sin( ) t L sin( ) L sin( ) L sin( ) (4) (5) Eğer presesyon ekseni ile diskin dönme ekseni dik olursa aşağıdaki bağıntı elde edilir I p (6) Şekil 4. Kütle ataletinin belirlenmesi için oluşturulan deney düzeneği 3.2 Kütle Atalet Momentinin Hesaplanması Rotorun atalet momentinin deneysel olarak hesaplanması için, iki yanından teller ile bağlanmış olan rotoru üzerinde bulunduran çubuk bulunduğu durumdan 180° döndürülerek rotorun tellerin ucunda düşey yönde durması sağlanır (Şekil 4). Rotor kendi ekseni etrafında küçük bir θ açısı kadar döndürülürse, tellerde β yer değiştirmesi gözlenir. Eğer her iki açının da küçük olduğu düşünülürse, Lt d d 2 (7) yazabiliriz. Her bir teldeki T gerilmesi oluştuğu düşünüldüğünde düşey dengeden T cos( ) Mg 2 (8) Yataydaki bileşenler ise bir kuvvet çifti oluşturur T sin( ) d d ve açılarının küçük değerleri için denklem (7-9) kullanılarak 29 (9) T sin( ) d T d Mg d 2 Mgd 2 d 4 Lt (10) Diskin hareket denklemini aşağıdaki gibi elde ederiz. 2 Mgd d Id 4 Lt (11) Mgd 2 d d 0 4 ILt (12) Denklem (11) düzenlenirse, Elde ettiğimiz bu denklem, basit harmonik hareketi tanımlar. Hareketin periyodu ise şöyle ifade edilir. T 2 4 ILt Mgd 2 (13) Bu eşitlikten kütle atalet momenti aşağıdaki gibi elde edilir. I Mgd 2T 2 16 2 L (14) 4. Deneyin yapılışı 1. Jiroskop sisteminin (Şekil 5) üzerindeki koruyucu cam kapağı çıkarınız. Tork kolunun dengede olup olmadığını kontrol ediniz eğer dengede değil ise tork kolu üzerinde hareket edebilen küçük halka şeklindeki kütleyi ileri geri hareket ettirerek tork kolunu denge konumuna getiriniz. Tork kolunun ucundaki vidanın her iki tarafına 50 gr'lık kütleleri takınız. Bu durumda oluşan jiroskobik kuvvet çifti tork kolunun dengeden uzaklaşmasına sebep olacaktır. 2. Hız kontrol ünitesini kullanarak rotor hızını 3000 d/dk'ya ayarlayınız. Presesyon hızını, tork kolu emniyet kapağı üzerindeki işaretli yere yükselene kadar değiştiriniz. Bu nokta jiroskobik kuvvet çiftinin, tork kolundaki kütlelerden doğan moment ile dengede olduğu noktadır. Bu durumda 10 devir için geçen süreyi kronometre ile ölçünüz. İyi bir yaklaşım sağlamak için en az 30 saniyelik periyotta ölçüm yapınız. Presesyon hızının değerini hesaplayınız. 30 Şekil 5. Jiroskop sistemi 3. Yukarıdaki adımları rotor hızını sırası ile 2000 d/dk ve 1500 d/dk ayarlayarak tekrar ediniz. 4. Tork kolundaki toplam kütleyi sıra ile 200 gr ve 300 gr yükselterek yukarıdaki adımları tekrarlayınız. Tork kolunun kütle takılan noktası ile destek noktası arasındaki mesafe 0.14 metredir. Kuvvet çiftinin teorik değeri her bir kütle için tork kolunun kütle takılan noktası ile destek noktası arasındaki mesafeyi kullanılarak hesaplanır. 5. Raporun hazırlanması 1. Deney sırasında elde ettiğiniz değerleri aşağıdaki tabloya yazınız. 2. Her bir kütle için presesyon-rotor hızı eğrisini aynı grafik üzerinde gösteriniz. 3. Çizdiğiniz grafik yardımı ile her bir kütlenin 250 rad/s sabit rotor hızında, tork kolunu dengede tutacak presesyon hızını hesaplayınız. Sabit rotor hızındaki, presesyon hızı ile kuvvet çifti arasındaki ilişkiyi gösteren eğriyi çiziniz. Aynı eğriyi aynı grafik üzerinde kuvvet çiftinin teorik değeri için çiziniz. 4. Çizdiğiniz grafik yardımı ile her bir kütlenin 2.5 rad/s sabit presesyon hızında, tork kolunu dengede tutacak rotor hızını hesaplayınız. Sabit presesyon hızındaki, rotor hızı ile kuvvet çifti arasındaki ilişkiyi gösteren eğriyi çiziniz. Aynı eğriyi aynı grafik üzerinde kuvvet çiftinin teorik değeri için çiziniz. 31 Tablo 1. Deney ölçüm verileri Denge Kütlesi (gr) Statik Moment (Nm) Jiroskopik Moment (Nm) Rotor Hızı Presesyon Hızı (d/dk) (rad/s) (d/dk) (rad/s) 1/wp (s/rad) 6. Kaynaklar 1. www2.hcmut.edu.vn/ huynhqlinh/project/Seminars/Gyro.doc 2. Encyclopedia Britannica Online. 3. http://hyperphysics.phy-astr.gsu.edu/HBASE/hframe.html 7. Raporların hazırlanması sırasında okunabilecek ek kaynaklar 1. Beer F.P., Johnston E.R., Mazurek, D.F., Cornwell, P.J., Eisenberg, E.R., Vector Mechanics for Engineers Statics and Dynamics, Ninth edition, McGrawHill. 32 İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 4 YATAKLARDA SÜRTÜNME KATSAYISININ BELİRLENMESİ Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 33 YATAKLARDA SÜRTÜNME KATSAYISININ BELİRLENMESİ 1. Giriş Dönel makine elemanları, güç santrallerinde, uçak motorlarında, otomobillerde, tıbbi cihazlarda, ev aletlerinde ve değişik birçok yerde kullanılmaktadır. Tüm bu dönel sistemlerin bir veya daha fazla yatakla desteklenmesi gerekmektedir. Dönel sistemlerin statik veya dinamik yükler altındaki durumunun belirlenmesinde bu yatakların önemli bir etkisi vardır. Sıklıkla karşılaşılan mil yatağı çeşitlerinden birisi Şekil-1’de görülmektedir. Burada mil dairesel bir yatak içerisinde yer almaktadır. Mil çapı genellikle yatak çapının %99,8 ile %99,9’u arasındadır, aradaki açıklıkta ise genelde yağ bulunur. Mil, hareketsiz durumda ve sabit yükle yüklü iken yatağın alt kısmı ile temas halindedir. Mil saat yönünde düşük bir hızla dönmeye başlarsa yatağın sağ tarafına doğru tırmanacaktır. Hız yavaş yavaş arttırılırsa mil yüzeyi ile yatak yüzeyi arasında bir yağ akışı oluşur ve mil oluşan yağ filminde yüzmeye başlar. Bu durumda metal teması söz konusu değildir, dolayısı ile başlangıç durumuna göre kayma sürtünmesinde bir azalma gözlemlenir. Şekil 1 Radyal kaymalı yatakta yük taşıyıcı akışkan filminin oluşması Bu tür yataklarda yağlama için tercih edilen yöntemlerden biri Şekil 2’de görülmektedir. Yatak ekseni boyunca açılan yiv, yağın iyi bir şekilde dağılmasını sağlar. Şekil 2: Eksenel yivli mil yatağı 34 En çok karşılaşılan yatak çeşitlerinden birisi de bilyalı yataklardır. Bu çeşit yataklarda dış yüzey ile mil arasında bilyalar bulunmaktadır (Şekil 3). Kaymalı yataklarda karşılaşılan kayma sürtünmesinin yerine, bilyalı yataklarda yuvarlanma sürtünmesi söz konusudur. Şekil 3: Bilyalı yatak Bilyalı yatakların önemli avantajlarından biri başlangıç anındaki sürtünmenin düşük olmasıdır. Kaymalı yataklarda ise eğer basınçlı yağ kullanılmıyorsa başlangıç anındaki sürtünme daha büyüktür. Bilyalı yataklar başlangıç anında yüksek yüklemelerin olduğu uygulamalar için daha uygundur. Öte yandan mil ile yatak arasındaki açıklıkta yağ filmi bulunan kaymalı yataklarda ise yüksek dönme hızlarının ve ani aşırı yüklemelerin olduğu durumlar için uygundur. Bilyalı yataklar mil etrafında, daha çok radyal yönde yer kaplar, kaymalı yataklar için ise mil ekseni boyunca daha çok yer gereklidir. Mil yatağında kullanılan malzemeler çalışma başlangıcındaki gerilmelere ve yüksek hızlardaki sıcaklığa dayanacak şekilde geliştirilmiştir. Örneğin sinterlenmiş bronz, yapısındaki gözeneklere yağ emdirilerek kullanılabilir. Son zamanlarda düşük sürtünmeye sahip PTFE gibi plastik malzemelerden de mil yatakları üretilmiştir. Daha iyi bir performans ise PTFE ve grafit kombinasyonu ile elde edilebilir. 2. Deney 2.1. Deney düzeneği Teçhizat: - HFN.5 Mil Yatağında Sürtünme cihazı - Kalay alaşımı mil yatağı astarı - PTFE mil yatağı astarı - Sinterlenmiş bronz mil yatağı astarı - İngiliz anahtarı, takometre, termometre, ağırlıklar. 35 Cihaz: Şekil 4’de görüldüğü gibi, düz bir masa üzerinde bir motor ve hız kontrolcüsü yerleştirilmiştir. Masanın alt kısmında ise iki rulmanın taşıdığı mil bulunur. Bu milin ucunda yatak astarını taşıyan ve bir tork kolunun bağlı olduğu yuva bulunur. Tork kolunu dengelemek için de bir yük sol tarafa monte edilmiştir. Tork kolunda, mil ekseninden 300 mm uzakta yük askısı bulunur. Bir V kayışı ile motordaki hareket mile aktarılır. Şekil 4: Deney düzeneği Yuvada bulunan çıkarılabilir metal halka, gerektiğinde mil yatağı astarlarının değiştirilebilmesini sağlamaktadır. Yuvanın üst kısmında termometrenin koyulabileceği bir delik açılmıştır. Ayrıca yuvanın üzerinde mil yatağındaki kalay alaşımı astarın yağlanmasını sağlayan bir yağ haznesi vardır. Yuvaya düşey yük uygulamak için metal sicimler ve 4:1 kaldıraç sistemi kullanılmaktadır. Bu kaldıraç sisteminin destek noktası masanın ayaklarından birine bağlıdır. Bu sistem yuvaya kendi ağırlığından dolayı 55 N yük uygulamaktadır. Deneyde üç farklı astar kullanılacaktır. Birincisi beyaz metal olup (bir kalay alaşımı) üzerinde bir yağ deliği ve yiv bulunmaktadır. İkincisi gözenekli, sinterlenmiş bronz ve üçüncüsü düşük sürtünmeli plastik olan PTFE’dir. Bahsedilen son malzemeye kuru yağlayıcı katılmıştır. Bu son malzeme kuru ( yağlamasız ) çalıştırılabilir. Kalay alaşımından yapılan astar tam yağlamalı durumda yüksek hız ve ağır yük uygulamalarına uygundur. Kuru kullanıma uygun değildir fakat, başlangıç koşullarına dayanabilir. Sinterlenmiş bronz ara sıra yapılan bir yağlama ile düşük ve orta büyüklükteki yüklemelerde uzun ömürlü olarak kullanılabilir. PTFE astar, milin yüzey hızının 0,5 m/s ‘yi geçmediği ve sıcaklığın -200 °C ile 250 °C arasında olduğu durumlarda kullanılabilir. 36 2.2. Deneyin amacı Bu deneyde mil yatağında üç farklı astar kullanılarak çalışma koşulları incelenecektir. 2.3. Deneyin öğrenme çıktıları Öğrenci değişik yatak malzemelerinin ve yağlamanın mil yataklarının performansını nasıl etkilediği öğrenecektir. 3. Teori İki yüzey arasındaki izafi harekete göre sürtünme halleri, geçiş bölgeleri ve sürtünme katsayısının hız ile değişimi aşağıdaki grafikte görülmektedir. Şekil 5 Stribeck sürtünme eğrisi Hidrodinamik kaymalı yatak deney düzeneği ile sürtünme katsayısının hesabında, cihazdan okunan sürtünme momentinden faydalanılmaktadır. Sürtünme momentinin mil yarıçapına bölünmesi ile sürtünme kuvveti hesaplanmaktadır. Sürtünme kuvveti mil üzerinde şekil 6’daki gibi oluşmaktadır. 37 Şekil 6 Radyal kaymalı yatakta sürtünme kuvveti Uygulanan radyal yük belli olduğundan sürtünme katsayısı deneysel olarak aşağıdaki denklemden elde edilmektedir. Tf f W R f T WR T f : sürtünme torku f : sürtünme katsayısı W : yük R : mil yarıçapı 4. Deneyin yapılışı Uyarı: Deney sırasında asılan yüklerin miktarının ve motor hızının değiştirilmesi gerekecektir. Belirtilen sınırların dışına çıkılması astara ve/veya mile zarar verebilir. Astarı değiştirmek için; 1. Yük askılıklarını asıldıkları yerden alın. 2. Termometreyi alın ve vidasını sökün. 3. Tork kolunun sonundaki çatalın vidasını gevşetin ve yana doğru açın. 4. Yuvada bulunan metal halkanın üzerindeki dört vidayı söküp halkayı çıkarın. 5. Yuvaya düşey yük uygulayan alttaki kolu kaldırıp metal sicimin gevşemesini sağlayın. Tork kolunu biraz indirin ve astarların bulunduğu yuvayı milden çıkarın. 6. Astarı iterek yuvadan çıkarın. 7. Eğer gerekiyorsa astar ve mildeki yağı temizleyin. 38 8. Yeni astarı, temizleyip, termometrenin temas edeceği havşanın üstte kalmasına dikkat ederek yuvaya yerleştiriniz. Yağ deliğinin de solda olmasına dikkat ediniz. 9. Termometreyi taşıyan vidayı yerine takınız. 10. Astarın bulunduğu yuvayı mile takınız. 11. Alttaki yük kolunu indirmeden önce metal sicimin makaradan geçtiğine emin olun. 12. Sicim ucundaki çentiklerin yuvalarına oturduğuna emin olun. 13. Metal halkayı yerine takınız. Metal halkada “top” yazan kısmın üstte olmasına dikkat edin. 14. Çatalı eski pozisyonuna getirin. 15. Yük askılıklarını takın. 16. Termometreyi yerine takın. Isı transferinin daha iyi olması için termometrenin takıldığı yuvaya birkaç damla yağ akıtılabilir. Tork kolunu ve ona asılı 1 N’luk yük askısını soldaki ağırlık ile bir kez dengelemek yeterli olacaktır. 1. Kısım, PTFE Astarı (a) Mil ve astar yuvasının yağdan arındırılmış olduğuna emin olun. PTFE astarını havşa üstte kalacak şekilde yuvaya yerleştirin. Termometrenin konulduğu vida şeklindeki kısmı fazla sıkmayın, aksi takdirde astar zarar görebilir. Bu astarda yağ deliğinin olmadığına dikkat edin. Sadece kuru sürtünme ile ilgili ölçümler yapılacaktır. Mil hızı 200 dev/dak ‘dır. Bu değeri aşmamasına dikkat edin. Alttaki yük askısına asılan yük 25 N’u geçmemelidir. ( Bu mil yatağına 4*25+55 = 155 N yük uygulamaktadır.) Deney sırasında mil yatağındaki sıcaklık 2 °C’den fazla artmamalıdır. Yük askılıkları boş iken motoru çalıştırıp, hızını 200 dev/dak’ya ayarlayın. Motoru bu şekilde bir iki dakika çalıştırın. Alttaki yük askısına 25 N’luk yük yerleştirin. Tork kolundaki askılığa bu kol dengelenene kadar yük yerleştirin. Sonuçları Tablo-1’e yazın. Mil yatağının yükünü, yani alttaki askının yükünü her defasında 5 N azaltarak gerekli ölçümleri yapın ve tabloya yazın. 0 N için yapılan ölçümden sonra, son olarak 25 N için ölçümü tekrar edin. 39 Tablo–1 Kuru Sürtünme Malzeme-PTFE Hız : 200 dev/dak Yatak yükü Tork kolu askısındaki yük Alttaki yük Toplam (N) askısı ( N ) (N) 25 20 15 10 5 0 25 Sürtünme Torku ( Nmm) 2.Kısım, Sinterlenmiş Bronz Astarı İkinci deneyde çok az yapılan bir yağlamanın sürtünmeyi nasıl azalttığını gözlemleyeceğiz. Kuru sürtünme deneyi, sinterlenmiş bronzun, yapısı itibarı ile kuru sürtünmeyi engelleyecek kadar yağı bünyesinde bulundurması nedeniyle yapılmamaktadır. Sinterlenmiş bronzun yapısı gözenekli olduğundan termometrenin temas ettiği havşa kısmında yağ kaçağı gözlemlenebilir. Mil hızı 200 dev/dak ‘dır. Alttaki yük askısına asılan yük 80 N’u geçmemelidir. Deney sırasında mil yatağındaki sıcaklık 2 °C’den fazla artmamalıdır. Astarı taşıyan yuvayı milden çıkarın, astar ve milin yüzeyini yağlayın ve yuvayı tekrar yerine takın. Yük askılıkları boş iken motoru çalıştırıp, hızını 200 dev/dak’ya ayarlayın. Motoru bu şekilde bir iki dakika çalıştırın. Alttaki yük askısına 80 N’luk yük yerleştirin. Tork kolundaki askılığa bu kol dengelenene kadar yük yerleştirin. Sonuçları Tablo-2’ye yazın. Mil yatağının yükünü, yani alttaki askının yükünü her defasında 20 N azaltarak gerekli ölçümleri yapın ve tabloya yazın. 40 Tablo-2 Hafif yağlamalı Malzeme- Sinterlenmiş Bronz Hız : 200 dev/dak Yatak yükü Tork kolu askısındaki yük Alttaki yük Toplam (N) askısı ( N ) (N) 80 60 40 20 0 80 Sürtünme Torku ( Nmm) 3. Kısım, Beyaz Metal Astarı (a) Mil ve astar yuvasının yağdan arındırılmış olduğuna emin olun. Beyaz metal astarını havşa üstte kalacak şekilde yuvaya yerleştirin. Ayrıca yağ deliğinin ve yivin solda olmasına dikkat edin. Deney ilk önce kuru sürtünme için yapılacak. Mil hızı 200 dev/dak ‘dır. Bu değeri aşmamasına dikkat edin. Alttaki yük askısına asılan yük 25 N’u geçmemelidir. Deney sırasında mil yatağındaki sıcaklık 4 °C’den fazla artmamalıdır. Yük askılıkları boş iken motoru çalıştırıp, hızını 200 dev/dak’ya ayarlayın. Motoru bu şekilde bir iki dakika çalıştırın. Alttaki yük askısına 25 N’luk yük yerleştirin. Tork kolundaki askılığa bu kol dengelenene kadar yük yerleştirin. Sonuçları Tablo-3A’ya yazın. Mil yatağının yükünü, yani alttaki askının yükünü her defasında 5 N azaltarak gerekli ölçümleri yapın ve tabloya yazın. 0 N için yapılan ölçümden sonra, son olarak 25 N için ölçümü tekrar edin. Tablo-3A Kuru Sürtünme Malzeme-Beyaz metal Hız : 200 dev/dak Yatak yükü Tork kolu askısındaki yük Alttaki yük Toplam (N) askısı ( N ) (N) 25 20 15 10 5 0 25 41 Sürtünme Torku ( Nmm) (b) Bu deneyde, sinterlenmiş bronz için 2. kısımda yapılan deney, beyaz metal astarı için de tekrar edilecektir. Sonuçları Tablo-3B’ye yazın. Tablo-3B Hafif yağlamalı Malzeme-Beyaz metal Hız : 200 dev/dak Yatak yükü Tork kolu askısındaki yük Alttaki yük Toplam (N) askısı ( N ) (N) 80 60 40 20 0 80 Sürtünme Torku ( Nmm) (c) Deneyin bu kısmı tam yağlamalı olarak yapılacağından yağ haznesini doldurun. Burada mil yatağının ısınmasıyla sürtünmenin nasıl değiştiğini gözlemleyeceğiz. Mil hızı 1400 dev/dak ‘dır. Alttaki yük askısına asılan yük 130 N’dur. Deney sırasında mil yatağındaki sıcaklık 50 °C’yi geçebilir. Yüksüz durumda mili 400 dev/dak hızda birkaç dakika çalıştırın. Daha sonra 1400 dev/dak hızda çalıştırın. Bu sırada yağlayıcıyı dakikada bir damla akıtacak şekilde ayarlayın. Alttaki tepsiye yağ damlayana kadar cihazı çalıştırmaya devam edin. Gerektiğinde yağ haznesini doldurun. Alttaki askıya 130 N yerleştirin ve mümkün olduğu kadar çabuk bir şekilde tork kolunu dengeye getirip termometreden sıcaklığı okuyun. Sıcaklık yükseldikçe tork kolundaki denge bozulacaktır. Her 3 °C’lik artış için gerekli ölçümleri yapıp değerleri Tablo-4’e kaydedin. Bu işlemi eğer mümkün ise maksimum 60 °C’ye kadar devam ettirin. Tablo-4 Tam yağlamalı – değişken sıcaklıklı Malzeme – Beyaz metal Mil hızı : 1400 dev/dak yatak yükü 4*130+55 = 575 N Sıcaklık Tork kolu yükü Sürtünme torku ( °C ) (N) ( N mm ) 42 (d) Tam yağlamalı durumda, yatağı yükleyen askıda 130 N varken mil hızını hız kontrolcüsünden 10’ar birim azaltın. Bu sırada tork kolunu dengeleyen yükü ölçüp Tablo-5’e not edin. Her defasında termometreden okunan sıcaklığı da not edin. Mil hızı 300 dev/dak civarına indiği zaman sürtünme tokunda bir artma gözlemlenir ve bu sırada motoru hemen kapatın. Motorun durdurulmasının nedeni azalan hızın, yağ filmi üzerindeki basıncı düşürmesi ve bunun sonucu olarak yağ filminin bozulmasıdır. Hız ayarı Tablo-5 Tam yağlamalı durumda hızın etkisi Malzeme – Beyaz metal Yatak yükü 575 N Mil hızı Tork kolu (dev/dak) yükü (N) Sürtünme torku ( N.mm ) 100 90 80 70 60 50 (e) Son olarak sabit hızda ve yaklaşık olarak sabit sıcaklıkta değişik yatak yüklemeleri için tork sürtünmesini ölçeceğiz. Yatak yükleme askısını boşaltın ve motoru çalıştırıp 1400 dev/dak hıza getirin. Ardından yükleme askısına 80 N yerleştirin, sürtünme torkunu ve sıcaklığı ölçerek Tablo-6’ya kaydedin. Yükü 20’şer N azaltarak 0 N’a kadar ölçümleri tekrar edin. Tablo-6 Tam yağlamalı durumda yatak sürtünmesi Malzeme – Beyaz metal Mil hızı : 1400 dev/dak Yatak yükü Sürtünme Tork yükü torku Askıdaki yük Toplam (N) ( N.mm ) (N) (N) 80 60 40 20 0 80 43 5. Raporun hazırlanması Deneyin amacı ve yapılışı kısaca anlatınız. Yukarıda belirtilen hususlara göre tabloları oluşturunuz. Yataktaki toplam yükü hesaplamak için, yükleme askısına koyulan yükün dört katına 55 N eklemek gerekmektedir. Sürtünme torku, tork koluna asılı olan askıya yerleştirilen yükün 300 mm ile çarpılmasından bulunur. Hazırlanacak Grafikler Tüm deneylerde sürtünme torkunun, o deneyde üzerinde çalışılan değişkene karşılık bilgisayarda grafiğini çizin. Noktalardan geçen eğrileri çizerek, çeşitli yatak yüklemelerine karşı bulunan sürtünme torkları izin verdiği sürece aşağıda izah edildiği gibi sürtünme katsayısını hesaplayınız. ( Grafikteki eğri yaklaşık olarak doğru ise ) Tf f W R f T WR T f : sürtünme torku f : sürtünme katsayısı W : yük R : mil yarıçapı yukarıdaki bağıntıda yer alan T terimi grafiklerdeki doğrunun eğimi olarak düşünülürse, ve mil W yarıçapı 20 mm olarak alınırsa sürtünme katsayısı aşağıdaki gibi hesaplanabilir. f Eğim (mm) / 20 (mm) Sonuçları yorumlayınız. Farklı yağ kullanma durumunda sonuçlar nasıl değişirdi? Açıklayınız. 6. Kaynaklar 1. Erdem Koç, 2004, “Makine Elemanları Cilt -II” 44 İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 5 LAMİNER VİSKOZ ISI TRANSFERİ Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 45 LAMİNER VİSKOZ ISI TRANSFERİ 1. GİRİŞ Mühendislik uygulamalarında en önemli ve en çok karşılaşılan konulardan birisi, farklı sıcaklıklardaki iki veya daha fazla akışkan arasındaki ısı transferidir. Sözü edilen akışkanlar genellikle katı bir cidar ile birbirinden ayrılmaktadırlar. Bu cihazlar, genellikle ısı değiştiricisi (eşanjör) olarak adlandırılmaktadır. Isı değiştiricileri endüstrinin en önemli ısı tekniği cihazları olup bunlar; buharlaştırıcı, yoğuşturucu, ısıtıcı, soğutucu vb. değişik adlar altında kimya ve petrokimya endüstrilerinin, termik santrallerinin, soğutma, ısıtma ve iklimlendirme tesislerinin hemen her kademesinde değişik tip ve kapasitelerde görülebilir. 2. DENEY 2.1. Deney düzeneği Eş merkezli borular arasındaki ısı transferini incelemek için Şekil 1’de görünen LAMINER / VISCOUS FLOW HEAT TRANSFER UNIT H970 adlı deney düzeneği kullanılmaktadır. Test bölgesinin şematik resmi Şekil 2.’de verilmektedir. Şekil 1. Deney düzeneği görünümü. Deney düzeneği bir ısı değiştiricisi olduğuna göre sistemde en az iki akışkan bulunmalıdır. Burada sıcak akışkan olarak ısı transfer yağı, soğuk akışkan olarak şebeke suyu kullanılmaktadır. Bu sistemde yağ tek yönde ve su her iki yönde dolaşabilmektedir. Dolayısıyla hem paralel (eş yönlü) akış, hem de zıt yönlü akış incelenebilmektedir. Yağın dolaşımını sağlayan küçük bir pompa, deney düzeneğinin en alt bölgesine yerleştirilmiştir. Bu pompa üç ayrı hızda çalışabilmektedir. Deney düzeneğinin su giriş hortumunu şebeke musluğuna bağlayarak sisteme su girişi sağlanır. Suyun debisi bir rotametre yardımıyla ölçülmektedir. Rotametre çıkış borusu deney amacına göre ya üst tarafa (paralel akış için) 46 veya alt tarafa (zıt akış için) bağlanır. T1 T3 Su çıkış veya giriş Yağ geri dönüşü T5 Rotametre ISI DEĞİŞTİRİCİSİ Sıcaklık göstergesi Neon lambası Kontrol vanası (su) Isıtıcı ayarlayıcı Su girişi Termostat Açma-kapama anahtarı Kontrol vanası (yağ) 0.6 Ölçüm kabı 0.4 Su giriş veya çıkış 0.2 0 Isıtıcı tankı Yağ pompası (=100 W) T4 T6 T2 Yağ ısıtıcısı (500W) Şekil 2. Deney düzeneği şematik resmi. Yağın debisi iki şekilde değiştirilebilir. Pompanın çalışma hızı değiştirilerek veya ısı değiştiricisinde yer alan yağ kontrol vanası yardımıyla debi değiştirilebilir. Şekil 2’de görüldüğü gibi yağ debisini ölçmek için bir ölçü kabı kullanılmaktadır. Bu kabın altında ısıtıcı tankı (yağ deposu) mevcuttur. Tankın içinde bulunan ısıtıcı yardımıyla sistemde dolaşacak olan yağ ısıtılır. Deney düzeneğinin ortasında bulunan reosta yardımıyla ısıtıcı elemanın gücü değiştirilebilmektedir. Neon lambanın yanıp sönme hızı da ısıtıcının çalışma etkinliğini göstermektedir. Ayrıca sistemin güvenliğini sağlamak amacıyla termostat kullanılmıştır. Yağ sıcaklığı 80 C ’nin 47 üzerine çıktığında otomatik olarak ısıtıcı devre dışı kalarak yağ ısıtma işlemi durdurulmaktadır. Sistemde bulunan altı adet termokapl yardımıyla altı yerel noktada sıcaklık değerleri doğrudan indikatör sıcaklık göstergesinden okunabilir. Her numaranın gösterdiği sıcaklık aşağıdaki gibidir: 1. 2. 3. 4. 5. 6. Yağ giriş sıcaklığı Yağ çıkış sıcaklığı Yağ girişi boru cidar sıcaklığı Yağ çıkışı boru cidar sıcaklığı Su giriş veya çıkış sıcaklığı Su çıkış veya giriş sıcaklığı 2.2. Deneyin amacı Yapılacak deneylerde ısı değiştiricisine ait ısı transferi özellikleri belirlenecektir. 2.3. Deneyin öğrenme çıktıları Eş merkezli bir ısı değiştiricisinde ters ve paralel akışın gösterilmesi, Isı değiştiricileri için Termodinamiğin birinci kanunun yazılması, Sıcak ve soğuk bölgelerin ısı taşınım katsayılarının belirlenmesi ve toplam ısı geçiş katsayısının hesaplanması. 3. TEORİ 3.1. Toplam Isı Transfer Katsayısı Isının sıcak akışkandan ayırıcı duvarı geçerek soğuk akışkana geçişi aşağıdaki şekilde gösterilmiştir. Şekil 3. Duvardan ısı geçişi 1 x 1 Isı, th ile tc arasında üç direnç Ah hh Am k Ac hc . Q şu şekilde yazılabilir: 48 tarafından kontrol edilir. Isı geçiş oranı, . Q (1) (t h - t c ) . Q (t h - t c ) R 1 x 1 Ak hh Am k Ac hc (2) Isı değiştiricisinin duvarları çok ince olduğundan dolayı alanları eşit alabiliriz. Bu durumda eşitlik, . Q AmU (t h t c ) U 1 1 x 1 hh k hc (3) halini alır. Burada U, toplam ısı transferi katsayısıdır. Duvar direnci (x/k), diğer dirençlerle kıyaslandığında oldukça küçüktür ve ihmal edilebilir. Ancak zamanla duvar yüzeyinde oluşan cüruflar (tortu veya karbon gibi) duvar yüzeyinde yeni bir katman meydana getireceğinden, bu durum tasarım aşamasında dikkate alınmalıdır. Görüleceği gibi bir ısı değiştiricisi dizaynında th,tc ve yüzey ısı transfer katsayıları en önemli parametreler olmaktadır. Yapılacak olan deneylerde doğruluğu bilinen metotlar yardımıyla bu parametrelerin tespiti yapılacaktır. 3.2. Tüplerde Zorlanmış Isı Taşınımı Zorlanmış ısı transferine etkiyen birçok faktör, ısı değiştiricisi problemlerinin teorik olarak çözümünü imkânsızlaştırmaktadır. Ancak, deneysel araştırmalarla desteklenen boyut analizleri sonucu kullanılabilir bir kaç bağıntının kolayca elde edilebilmesi mümkün olmuştur. Çoğunlukla kullanılan bağıntı: şeklindedir. Burada, Nusselt Sayısı: Reynolds Sayısı Prandtl Sayısı Geometrik Ortalama L Nu Re Pr D hL Nu k uL Re C Pr k L D 49 (4) (5) (6) (7) (8) Sabit kesitli kanallarda tam gelişmiş türbülanslı akışlarda aşağıdaki formül kullanılır: Nu 0.023 Re 0.8 Pr 0.4 (9) İç akışın hidrodinamik ve ısıl olarak gelişmesini gösteren Graetz Sayısı için . Re Pr m C Gz 4 L kL D (10) formülü kullanılır. Nusselt ve Graetz sayıları arasında Nu a.Gz b şeklinde bir ilişki kurulabilir. (örnek: Nu 1.75Gz 1 / 3 ) 3.3. Basit Konsantrik Tüp Isı Değiştiricilerinde Sıcaklık Dağılımı Paralel (eş yönlü) ve zıt yönlü akışlı basit konsantrik tüp ısı değiştiricilerinde, sıcaklıkların konuma bağlı değişimi aşağıda gösterilmiştir. Paralel (Eş Yönlü) Akış t3 Zıt Yönlü Akış t4 t3 t1 t4 t1 t2 t5 t2 t6 t5 t1 t6 t1 t2 t4 t3 t3 t6 t2 t1 t4 t1 t6 Şekil 4. Konuma göre sıcaklık değişim grafikleri. İki akım arasındaki (ve metal duvar ile akımlar arasındaki) sıcaklık farkı, ısı değiştiricisinin pozisyonlarına göre değişiklik göstermektedir. Lokal sıcaklık farklarının ortalama değerleri bulunduğunda, hesaplamalar kolaylaşır. Akışkanın iki akımı arasındaki ortalama sıcaklık farkı şu formülle hesaplanır, 50 . (t1 t 5 ) (t 2 t 6 ) t t ln 1 5 t2 t6 (11) Ancak akış laminer olduğunda genellikle aritmetik sıcaklık ortalaması kullanılır: . m ( t1 t 5 ) ( t 2 t 6 ) 2 (12) Akım ile duvar arasındaki ortalama sıcaklık farkını bulmak için de benzer denklemler kullanılır. Isı transfer oranı aşağıdaki denklemlerle hesaplanabilir. Q UAm m (13) Metal duvar, ısı geçişine karşı çok az direnç göstereceğinden duvarın herhangi bir noktasındaki sıcaklık değişimi çok az olacaktır ve duvar sıcaklığı kesikli çizgilerle gösterilebilir. Laminer Viskoz Isı Transferi ünitesinde sıcak ve soğuk su akımlarının hem paralel hem de ters yöne geçişi mümkündür. Her iki akımın giriş ve çıkış sıcaklıkları ölçülebileceği gibi, ısı geçiş alanlarının her iki ucundaki duvar sıcaklığı da ölçülebilir. 3.3. Isı Transfer Katsayılarının Belirlenmesi Her iki akımın sıcaklıklarının ve kütle debilerinin ölçülmesiyle aşağıdaki hesaplamalar yapılabilir. Sıcak akımdan olan ısı akısı: . . Q i m i C (t1 t 2 ) (14) Soğuk akımdan olan ısı akısı: . . Q o m o C (t 5 t 6 ) (15) Toplam ısı transferi katsayısı: . Qi U (t t ) (t 2 t 6 ) Am 1 5 2 (16) Tüpün iç yüzeyi ile sıcak akım arasındaki yüzey ısı transfer katsayısı: . Qi hi (t 1 t 3 ) (t 2 t 4 ) Ai 2 Tüpün dış yüzeyi ile soğuk akım arasındaki yüzey ısı transfer katsayısı: 51 (17) . Qi hd (t t ) (t 4 t 6 ) Ad 3 5 2 (18) 4. DENEYİN YAPILIŞI 4.1. Birinci Kısım: Basit Konsantrik Isı Değiştiricisi i) Güç kaynağı konum anahtarını açık konumuna getiriniz ve yağ kontrol valfini sonuna kadar açınız. ii) Isıtıcı kontrol düğmesini saat yönünde çevirerek maksimum seviyede açınız. t1 sıcaklığı 60°C ’ye ulaşıncaya kadar bekleyiniz. iii) Soğutma suyunu açarak seviyesini 12 g/s de tutunuz. iv) Isıtıcı kontrol düğmesini orta konuma getirerek t1 sıcaklığının daimi hale gelmesini bekleyiniz. v) t1 sıcaklığı daimi hale geldiğinde tüm sıcaklıkları kaydediniz. 4.2. İkinci Kısım: Isı Değiştiricisinde Enerji Hesabı i) Güç kaynağı konum anahtarını açık konumuna getiriniz ve yağ kontrol valfini sonuna kadar açınız. ii) Isıtıcı kontrol düğmesini saat yönünde çevirerek maksimum seviyede açınız. t1 sıcaklığının 70°C ’ye ulaşana kadar bekleyiniz. iii) Soğutma suyu seviyesini 15 g/s seviyesine kadar açınız. iv) Isıtıcı kontrol düğmesini orta konuma getirerek t1 sıcaklığının 70°C ile 80°C arasında daimi hale geldiğinde, aşağıdaki değerleri kaydediniz. Yağ giriş sıcaklığı Yağ çıkış sıcaklığı Biriken yağın hacmi Yağın birikme süresi Su giriş sıcaklığı Su çıkış sıcaklığı Su debisi t1 (°C) t2 (°C) (lt) (sn) t6 (°C) t5 (°C) . mw (g/s) 4.3. Üçüncü Kısım: Yağın ve Suyun Isı Transferi Katsayılarının Hesaplanması i) Güç kaynağı konum anahtarını açık konumuna getiriniz ve yağ kontrol valfini sonuna kadar açınız. ii) Boşaltma tankı kontrol valfini açınız. iii) Isıtıcı kontrol düğmesini saat yönünde çevirerek maksimum seviyede açınız. t1 sıcaklığı 70°C ’ye ulaşana kadar bekleyiniz. iv) Soğutma suyu seviyesini 20 g/s seviyesine kadar açınız. v) Isıtıcı kontrol düğmesini orta konuma getirerek t1 sıcaklığının 70°C ile 80°C arasında daimi hale gelmesini bekleyiniz ve aşağıdaki değerleri kaydediniz. 52 Yağ giriş sıcaklığı Yağ çıkış sıcaklığı Biriken yağın hacmi Yağın birikme süresi Metal tüpün üst uç sıcaklığı Metal tüpün alt uç sıcaklığı Su giriş sıcaklığı Su çıkış sıcaklığı Su debisi t1 (°C) t2 (°C) (lt) (sn) t3 (°C) t4 (°C) t6 (°C) t5 (°C) . mw (g/s) 5. RAPORUN HAZIRLANMASI 5.1. Kısım 1 : Basit Konsantrik Isı Değiştiricisi Elde ettiğiniz sonuçlarla su, yağ ve metal sıcaklığının konuma göre (T-L) değişimini gösteren grafikleri çiziniz. 5.2. Kısım 2: Isı Değiştiricisinde Enerji Hesabı Deneyde elde edilen verileri kullanarak ısı değiştiricisinin ısı akısını hesaplayınız. 5.3. Kısım 3: Yağın ve Suyun Isı Transferi Katsayılarının Hesaplanması i) Deneyde elde edilen verileri kullanarak ısı değiştiricisine ait aşağıdaki değerleri hesaplayınız. (ms-1) (ms-1) (W/m2 K) (W/m2 K) (W/m2 K) Yağ hızı Su hızı Yağın yüzey ısı transfer katsayısı Suyun yüzey ısı transfer katsayısı Toplam ısı transfer katsayısı ii) Sabit su hızı için: 1. Yağ ile yüzey arasındaki ısı transferi katsayısı ile yağ hızı 2. Yağ ile su arasındaki toplam ısı transferi katsayısı ile yağ hızı grafiklerini çiziniz. 5.4. Hesaplamalarda Kullanılacak Boyutlar ve Bilgiler Test bölümü geometrisi Şekil 5’te gösterilmiştir. İç Tüp : Malzeme: Bakır Dış yarıçap (dd) = 12.7 mm İç yarıçap (di) = 11.3 mm Efektif uzunluk = 910 mm Dış transfer alanı İç ısı transfer alanı Ortalama ısı transfer alanı Akış alanı Ad = 0.0365 m2 Ai = 0.0323 m2 Am = 0.0342 m2 Si = 96.7*10-6 m2 53 Dış Tüp: Malzeme: Bakır Dış yarıçap (dd) =15.9 mm İç yarıçap (di) =14.4 mm Akış alanı Sd = 36.2*10-6 m2 Su: C = 4.18kJ/kgK (40°C için) C = 4.22kJ/kgK (100°C için) Yağ: k=0.1287 W/mK (70oC için) =6.64x10-3 kg/m.s (70oC için) Akışkanlar için verilen değerlerin sıcaklıkla değişimi ve gerekli olabilecek tüm diğer veriler için kaynak kitapları kullanınız. 910 mm do=12.7 15.9mm 5 r i= 6 5. 14.4mm Şek il 5. Test bölgesi boyutları. 6. KAYNAKLAR 1. Incropera F.P. ve DeWitt D.P., 2001, Isı ve Yayıncılık, İstanbul. Kütle Geçişinin 2. Genceli O., 1999, Isı Değiştiricileri, Birsen Yayınevi, İstanbul. 54 Temelleri, Literatür İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 6 FRANCİS TÜRBİNİ Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 55 FRANCİS TÜRBİNİ 1. GİRİŞ Su değirmenleri binlerce yıl boyunca endüstriyel güç üretmek için kullanıldı. Su değirmenlerinden modern türbinlere geçiş yaklaşık olarak yüzyılda gerçekleşmiştir. Türbin, endüstriyel devrim sırasında bilimsel prensipler ve metotların kullanılması ile geliştirilmiştir. İlk türbin Jan Andrei Segner tarafından 1700’lerin ortasında geliştirilmiştir. 1820’de Jean Victor Poncelet içeri doğru akışlı türbini geliştirmiştir. Dışarı doğru akışlı türbin Benoit Fourneyron tarafından 1826 yılında geliştirilmiştir. James B. Francis, içeri doğru akışlı türbini geliştirerek türbin verimini % 90’nın üzerine çıkarmıştır. Francis türbini, ismini geliştiricisi James B. Francis’ten almıştır. Kendisi ayrıca karmaşık testler ve su türbini tasarımında kullanılan mühendislik metotlarının geliştirilmesinde öncülük etmiştir. Francis türbini hala dünyada en çok kullanılan su türbinidir. 2. DENEY 2.1. Deney düzeneği Deney düzeneği ve türbin fren mekanizması sırayla Şekil 1 ve 2’de gösterilmiştir. Şekil 1. Francis türbini deney düzeneği 56 Şekil 2. Türbin fren mekanizması 2.2. Deneyin amacı Francis Türbini ile yapılacak çeşitli ölçümlerle turbo makinelere ait teorik bilgilerin tazelenerek, bu bilgilerin pratik kullanımının pekiştirilmesidir. Temel olarak, performans parametrelerinden debi, basınç, çark dönme hızı ve torkunun deneysel olarak ölçülerek gücünün ve veriminin belirlenmesini içermektedir. 2.3. Deneyin öğrenme çıktıları Francis türbinin çalışma prensibinin uygulamalı olarak görülmesi. Türbin performans karakteristiklerinin deneysel olarak elde edilmesi. Ölçümlere bağlı olarak performans parametrelerinin birbirlerine göre değişimlerinin belirlenerek performans eğrilerinin oluşturulması. 57 3. TEORİ Mekanik enerjiyi hidrolik enerjiye dönüştüren makinelere Pompa, hidrolik enerjiyi hareket enerjisine dönüştüren makinelere ise Türbin adı verilir. Türbin çarklarına çarpan akışkan, mekanik enerjisinin bir kısmını çarkları döndürmek için harcayarak merkeze doğru hareket eder ve basıncını kaybeder. Akışkan enerjisinin bir kısmını da türbin sistemindeki sürtünmeler nedeni ile ısı olarak kaybeder. Hidrolik türbinlerin en yaygın kullanılanları Francis tip türbinlerdir. Francis türbinler radyal tip reaksiyon türbinlerdir. Düşük basınç yüklerinde de yüksek hızlar elde edebilme kabiliyetine sahiptirler. Bu yüzden Pelton türbin ve eksenel tip Kaplan türbinlere kıyasla daha düşük basınç yüklerinde de (düşük baraj seviyelerinde) yüksek güç üretimi sağladıklarından yaygın olarak tercih edilirler. Türbin içinden geçen akışkanın türbin içine bıraktığı net güç (hidrolik güç): Po QgH (1) : Yoğunluk (kg/m3) Q : Hacimsel debi (m3/s) g : Yerçekimi ivmesi (m/s2) H : Net düşü veya basınç yükü (metre su sütunu, mSS) ile ifade edilir. Ancak sistemdeki çeşitli kayıplar nedeni ile bu gücün tamamı türbin miline aktarılamayacaktır. Türbin miline gelen güç P0 bir katsayı ile çarpılarak elde edilir. Bu katsayı türbinin genel verimi olarak adlandırılır ve ile gösterilir. Bu durumda türbin miline gelen güç P QgH (2) P : Türbin milinde üretilen net güç, watt : Türbinin genel verimi olmaktadır. Denklem (1) ve (2) ’deki net düşü terimi türbin içinden geçen akışkanın, türbin içinde bıraktığı enerjinin birim kütleye düşen miktarının akışkan yüksekliği karşılığı olarak tanımlanır ve g indisi girişi, c indisi çıkışı göstermek üzere türbin giriş ve çıkışı arasında Bernoulli denklemi yazılarak aşağıdaki şekilde elde edilir. Pg Vg 2 Pc Vc 2 H zg zc g 2 g g 2 g (3) Her akım makinesini tanımlayan beş büyüklük vardır. Tanım büyüklükleri, i) devir sayısı, ii) debi, iii) özgül enerji, iv) verim ve v) güçtür. Tanım büyüklüklerinin sadece ikisi bağımsız; diğerleri ise bu iki bağımsız büyüklük cinsinden ifade edilebilmektedir. Kurulan bağıntılar akım makinesinin boyutsuz sayıları ismini alır ve Tablo 1’de gösterilmiştir. 58 Basınç sayısı Debi sayısı Güç sayısı Reynolds sayısı Tablo 1. Boyutsuz sayılar gH 2 2 n D Q nD 3 P 3 3 n D UD Re µ: Dinamik viskozite (kg/ms) U: Hız (m/s) Ancak bu boyutsuz sayılar, türbin seçimi için yeterli olmamaktadır. Çünkü bir türbinin tasarım aşamasında çap (D) hakkında bir bilgi yoktur. Bu nedenle, türbinin sağlaması gereken tasarım değerleri cinsinden “Tanım sayısı” veya “Özgül Hız” adı verilen bir katsayı kullanılır. nq N Q 3/ 4 H (4) N : Devir sayısı veya dönme hızı (d/dak) Tanım sayısının, mil gücünü, P, içeren formu ise, P nq N H 5 / 4 4. DENEYİN YAPILIŞI (5) 4.1. Birinci Kısım i) Üst depo seviyesini sıfırlamak için su tankının alt kısmını, üst kısmının 5 mm altına kadar ve üst kısmını da “V” çentiğinin alt hizasına kadar su ile doldurunuz. ii) Tankın üst kısmından alt kısmına su kaçmasını engellemek için pompa ile türbin arasındaki valfi kapalı konuma getiriniz. iii) Üst deponun orta kısmındaki su seviyesini gösteren saydam cetvelin sıfırını su ile aynı seviyeye getiriniz. iv) Cetvel üzerinden okunan su yüksekliği, Şekil 3’te verilen pompa performans eğrilerinden faydalanarak debinin hesaplanmasında kullanılacaktır. 4.2 İkinci Kısım Deney düzeneği çalıştırılarak okunan devir sayısı için: i) Saydam cetvel üzerinden su yüksekliği okuyunuz. ii) Gösterge paneli üzerindeki voltmetre ve ampermetreden pompa motorunun akım ve voltaj değerlerini okuyunuz. 59 iii) Fren tamamen boşaltıldıktan sonra balans ayarını yapınız ve dinamometre üzerinden fren kuvvetinin değerini okuyunuz. iv) Freni sıkınız ve balans ayarını yeniden yaptıktan sonra dinamometre üzerinden fren kuvvetinin değerini okuyunuz. 4.3 Üçüncü Kısım İlk iki kısımdaki işlemleri pompanın minimum ve maksimum devirleri arasında 10 devir sayısı için tekrarlayınız. Şekil 3. Pompa performans grafiği 60 Şekil 4. T1 grafiği 61 5. RAPORUN HAZIRLANMASI 1-) Francis türbinini diğer türbin çeşitleri ile karşılaştırarak kısaca farklarını ve kullanım yerlerini belirtiniz. 2-) Aşağıda belirtilen işlemleri ölçüm yaptığınız her bir devir sayısı için tekrarlayınız. i) Şekil 4’te verilen Düşü (mm)-Debi (lt/s) grafiğinden debi değerini okuyunuz. ii) Pompa performans eğrisi grafiğinden (Şekil 3) pompa verimi ve basınç yükünü (H) okuyunuz. iii) Fd = y - x formülünden fren kuvvetini hesaplayınız. iv) = Fd * r formülünden tork değerini hesaplayınız. : Tork (N.m.) r : Fren diskinin merkezi ile fren pabucunun merkezi arasındaki mesafe, 0.0762 m v) Pompanın özgül hızını (nq) hesaplayınız. 2N vi) Türbinin mekanik gücünü W m formülü ile hesaplayınız. 60 = F * R Türbin ve pompa çarkları üzerinde oluşan tork (N.m) R = 0.175 m Pompa için yarıçap R = 0.074 m Türbin için yarıçap vii) Elektriksel gücü We = V * A formülünden yararlanarak hesaplayınız. We : Elektriksel güç, Watt V : Pompa motoru üzerindeki gerilim, Volt A : Pompa motorundan geçen akım, Amper viii) Pompa hidrolik verimini hesaplayınız. p Su gücü g Q H 100 9.81 Q H 100 Mekanik güç 60 10 3 Wm 60 Wm 100 (6) : Suyun yoğunluğu, 1000 kg/m3 g : Yerçekimi ivmesi, 9.81 m/s2 ix) Türbin hidrolik verimini hesaplayınız. 60 10 3 Wm 60 Wm 100 Mekanik güç p 100 Su gücü g Q H 100 9.81 Q H 62 (7) x) Hesapladığınız değerler yardımı ile debinin devir sayısı ile değişimini (N-Q), pompa hidrolik veriminin devir sayısı ile değişimini (N-p) ve elektriksel gücün devir sayısı ile değişimini (N-We) gösteren grafikleri çiziniz. 6. KAYNAKLAR 1. http://www.british-hydro.org 2. Tecquipment international, GH5 series tutor pumps and turbines instruction manual. 3. Edis, K. ve Kardoğan, H, 1995, Makine Mühendisleri için uygulamalı akışkanlar mekaniği 7. RAPORLARIN HAZIRLANMASI SIRASINDA OKUNABİLECEK EK KAYNAKLAR 1. Kirkor Yalçın, 1998, “Hacimsel ve Santrifüj Pompalar / Santrifüj Pompaların Proje Hesabı ve Çizimi / Çözümlü Problemler” 63 İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 7 STATİK VE DİNAMİK DENGE Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 64 STATİK VE DİNAMİK DENGE 1. Giriş Yüksek hızda dönen miller, eğer bir titreşim kaynağı değillerse çok dikkatli bir şekilde dengelenmelidirler. Eğer mil dengede değil ise ve düşük hızlarda dönüyorsa meydana gelecek olan titreşim sadece bir rahatsızlık verir. Ancak mil çok yüksek hızlarda dönüyorsa dengesizlik çok küçük bile olsa mil üzerinde büyük hasarlar meydana gelebilir. Örnek olarak, eğer bir arabanın ön tekerleğinde bir miktar dengesizlik mevcutsa bu durum, arabanın direksiyonunda titreşimler oluşmasına yol açar. Eğer arabanın tekerleği ciddi olarak dengesizlik içindeyse arabanın kontrolü çok zorlaşır ve tekerlek rulmanları çok çabuk aşınır. Bu durum özellikle titreşimin frekansı, sistemin doğal frekansına yaklaştığında ortaya çıkar. Tekerlek jantı üzerindeki dikkatle hesaplanarak bulunacak bir noktaya yerleştirilecek küçük bir kütle bu olayın önüne geçebilir (Şekil 1). Şekil 1. Çinko malzemeden yapılmış ve tekerleklerin dinamik dengesi için kullanılan ağırlık. Bir milde statik dengenin sağlanması için milin herhangi bir durağan konumunda kalmasını sağlayacak dengeleme kütlesini yerleştirmek yeterli olacaktır. Üzerine kütleler yerleştirilmiş bir mil hem statik hem de dinamik olarak dengelenebilir. Eğer statik olarak dengede ise herhangi bir açısal konumda dönmeden durabilir. Mil dinamik olarak dengede ise herhangi bir hızda titreşimsiz dönebilir. Bir mil dinamik olarak dengede ise statik olarak da dengededir. Ancak tersi her zaman geçerli değildir. 65 2. Deney 2.1 Deney düzeneği Deney, aşağıda görülen deney düzeneği kullanılarak gerçekleştirilecektir. Şekil 2. Statik ve Dinamik Denge Deney Cihazı (TQ - TM102) 2.2. Deneyin Amacı Deneyde üzerine kütleler yerleştirilmiş bir milin durağan (Statik) ve hareketli (Dinamik) durumları için denge şartlarının incelenmesi amaçlanmaktadır. 2.3. Deneyin öğrenme çıktıları Bu deneyi yapan bir öğrenci, millerdeki statik ve dinamik denge kavramı ile ilgili teorik bir altyapıya sahip olur. Ayrıca, statik ve dinamik olarak dengesiz olan millerin uygulamalı olarak nasıl denge haline getirilebileceğini öğrenir. 3. Teori 3.1 Statik Denge Üzerinde kütleler bulunan bir mil eğer statik olarak dengede ise, mili saat yönünde dönmeye zorlayan kütlelerin ağırlığından dolayı oluşan moment, mili ters yönde dönmeye zorlayan kütlelerin oluşturduğu momente eşit olmalıdır (Şekil 3). Bu durumda mil çevresinde kütlelerin oluşturduğu toplam dönme momenti M o , 0’a eşit olmalıdır. M o 66 0 (1) Üç kütleli basit bir sistem için (Şekil 3a) statik denge; W1 r1 cos 1 W2 r2 cos 2 W3 r3 cos 3 0 (2) eşitliği ile sağlanır. Burada W mildeki yüklerin ağırlıklarını, r yüklerin ağırlık merkezleri ile milin dönme merkezi arasındaki mesafeyi, ise kütlelerin ağırlık merkezlerinin yatayla yaptığı açıyı göstermektedir. 2 r2 1 r1 3 1 W2 m2 g 2 W1 m1 g r3 3 W3 m3 g a) b) Şekil 3. a) Üç kütleli sistem, b) Üç kütleli sistemin serbest cisim diyagramı. Statik dengenin sağlanabilmesi için momentlerin oluşturduğu üçgen mutlaka kapanmalıdır (Şekil 4b). a) b) Şekil 4. a) Üç kütleli sistem, b) Üç kütleli sistem için statik dengenin sağlandığı durumda moment üçgeni. 67 Bilinmeyen moment varsa, bu moment değeri üçgeni kapatacak büyüklükte seçilmelidir. Eğer üçten fazla kütle varsa momentler Şekil 5’de olduğu gibi kapalı bir poligon olmalıdır. Şekil 5. Dört kütleli mil için statik denge şartı 3.2 Dinamik Denge Kütleler mil dönerken merkezkaç kuvvetine maruz kalırlar. Milin dönerken titreşim yapmaması için iki şart sağlanmalıdır: a) Mili eğilmeye zorlayacak bir denge dışı merkezkaç kuvvet olmamalıdır. b) Mili dönmeye zorlayacak bir denge dışı moment veya kuvvet çifti olmamalıdır. Bahsedilen şartlar sağlanmazsa mil dinamik olarak dengelenmemiştir. Birinci şartı Şekil 3' de gösterilen mile uygularsak; F 0 olmalıdır. Burada F ilgili kütlenin oluşturduğu merkezkaç kuvvetidir. 68 (3) Merkezkaç kuvvet mr 2 veya W r 2 ise, g W1 2 W2 2 W3 2 r11 r22 r33 0 g g g (4) Dönme hızı tüm kütleler için aynı olduğundan; W1 r1 W2 r2 W3 r3 0 (5) elde edilir. Bu eşitlik, (2) denkleminin aynısıdır. Bu da dinamik dengenin sağlanabilmesi için öncelikle statik dengenin sağlanması gerektiği sonucunu göstermektedir. İkinci şartı açıklamak için Şekil 6’i inceleyelim. F3 F2 Ağırlık merkezi moment a2 a1 a3 F1 Şekil 6. Üç kütleli mil sistemi. Şekildeki merkezkaç kuvvetleri ( F1 , F2 ve F3 ) eğer dinamik denge halinde değillerse milin ağırlık merkezinde bir moment oluşturabilir ve bu moment milin hızlı devirlerinde titreşime yol açar. Dinamik dengenin sağlanabilmesi için, mil üzerindeki merkezkaç kuvvetlerinin bir noktaya göre yaratacağı momentlerin vektörel toplamlarının sıfır olması gerekir. a1 F1 a2 F2 a3 F3 0 69 (6) Eğer yalnızca iki kütleli bir mil söz konusu olursa ve kuvvetler de eşit olursa ( F1 F2 ), dinamik dengenin sağlanabilmesi için a1 a2 olmalıdır (Şekil 7). Bu şart ise ancak her iki kütlenin de aynı noktaya bağlanması ile sağlanabilir. F1 F1 a1 a2 F2 F2 Şekil 7. İki kütleli mil sistemi. 4. Deneyin yapılışı Deney, üzerinde dört kütle bulunan bir mil için yapılacaktır. Wr Değerlerinin Deneysel Olarak Hesaplanması 1. adım; Emniyet kapağını ve mil kayışını çıkarınız. 2. adım; Uzatma makarasını motor tarafından tahrik edilen milin ucundaki makaraya ekleyiniz. 3. adım; Deney aletini masanın kenarına getiriniz. Ağırlık kutusunun kordonunu uzatma makarasının üzerine birkaç tur dolayınız. 4. adım; Tam ölçü skalasından 0º yi okuyacak şekilde dikdörtgen bloğu mile yerleştirerek sabitleyiniz. 70 5. adım; Dikdörtgen blok 90º oluncaya kadar ağırlık kutusuna çelik bilyelerden atınız. 6. adım; Bloğun 90º‘ye ulaşması için gerekli bilye sayısını kaydediniz. Bu bloğun dengesizlik momenti (Wr) ile orantılıdır. 7. adım; Aynı işlemi diğer bloklarla yaparak her biri için gerekli olan bilye sayısını bulunuz. Sonuçlar Tablo I’ i kullanarak (1) ve (2) nolu bloklar için uygun açısal ve mil yönü konumlarını seçiniz. (3) ve (4) nolu blokların açısal konumlarını hesaplama ya da çizim yoluyla bulunuz. (3) ve (4) nolu blokların mil yönündeki yer değiştirmesini hesaplama ya da çizim yöntemiyle bulunuz. Blokları verilen ve hesaplanan konumlarda sürgüyü kullanarak yerleştiriniz. Sürgüyü bir uca iterek bloklardan uzaklaştırınız. Milin statik olarak dengede olup olmadığını kontrol ediniz. Tahrik kayışını ve emniyet kapağını yerleştirerek motoru çalıştırınız ve milin dinamik dengede olup olmadığını kontrol ediniz. Eğer mil dengede değilse hesaplamalarınızı ve blokların konumlarını kontrol ederek hatayı gidermeye çalışınız. 71 Mil tam olarak dengeye geldiğinde bloklardan birisini çok küçük miktarda kaydırarak denge üzerine etkisini gözlemleyiniz. 5. Raporun hazırlanması Statik ve Dinamik denge şartlarını yazınız. Vektör diyagramını milimetrik kağıda çiziniz. Hesaplamaları gösteriniz. Günlük hayatta karşılaştığımız statik ve dinamik denge durumları için örnekler yazınız. Deneyin sonuçlarını yorumlayınız. 6. Kaynaklar 1. Analytical Dynamics, Haum Baruh, McGrawHill. 2. Vector Mechanics for Engineers, Ferdinand P. Beer, E. Russell, Johnston Jr., Mc. GrawHill. 72 TABLO I. Blokların mil üzerindeki konumlandırma referansları 73 İSTANBUL ÜNİVERSİTESİ MÜHENDİSLİK FAKÜLTESİ MAKİNE MÜHENDİSLİĞİ BÖLÜMÜ MAKİNE LABORATUVARI I DENEY NO: 8 EĞRİSEL BAR APARATLARI Öğretim elemanı adı ve soyadı: Öğrenci adı ve soyadı: Öğrenci numarası: Deneyin yapılış tarihi ve saati: Deney raporu teslim tarihi ve saati: 74 EĞRİSEL BAR APARATLARI 4. Giriş Eğrisel elemanlar yapısal mühendislikte, köprülerin kemer kısımları hariç sıkça kullanılmazlar. Makine mühendisliği yapılarında çoğunlukla kullanılırlar ve genellikle çökme miktarlarının hesaplanmasına ihtiyaç duyulur. Bu elemanlar tek başlarına kullanıldıkları gibi düz elemanlar ile birleştirilerek kullanıldığı durumlarda vardır. Her türlü katı madde, üzerine yük uygulandığında bir miktar şekil değiştirir. Eğer uygulanan yük kaldırıldığında cisim başlangıç haline tamamen dönebiliyorsa “Elastik Şekil Değişimi”, yük kaldırıldığında cismin bir miktar şekil değişiminin kalıcı olduğu gözleniyorsa “Plastik Şekil Değişimi” söz konusudur. Katı cisimlerdeki şekil değişim miktarı, pek çok durumda, boyutlarına göre oldukça küçük miktarlarda gerçekleşebilir. Ancak bahsedilen küçük şekil değişimleri, periyodik tekrarlanmalar veya sürekli olarak uzun süreli gerçekleşme hallerinde, cismin dayanım hesaplarının önemli bir kısmını oluşturmaktadır. Bu deneyde eğrisel elemanlar üzerindeki çökme miktarlarının komparatörler vasıtasıyla ölçülmesi üzerinde durulacaktır. 5. Deney 1. Deney Düzeneği Şekil 1 de görülen deney düzeneği, çökme miktarı ölçülecek olan test elemanlarının üzerine yerleştirildiği bir düzenek, düzenek üzerinde çökme miktarlarını ölçmeye yarayan komparatör ve eğrisel eleman üzerinde çökme oluşturması için kullanılan ağırlıklar ve ağırlıkların asıldığı askıdan oluşmaktadır (a) Çember (b) Yarı Çember Şekil 1 Test elemanları 75 (c) Çeyrek Çember ve Davit 1. Deneyin Öğrenme Çıktıları Bu deneyi başarı ile tamamlayan öğrenci, Castigliano teoremi ile ilgili bilgilerini pekiştirir, Komparatör kullanarak yer değiştirme miktarını ölçmeyi öğrenir. 6. Teori Castigliano teoremi eğrisel kiriş üzerine uygulanan kuvvetin oluşturduğu çökmeyi belirlemek için kullanılabilir. Bu teoreme göre, bir cisme belirli bir yönde uygulanan kuvvetin oluşturduğu çökme, şekil değiştirme işinin kuvvetin bu yöndeki bileşenine göre alınmış kısmi türevine eşittir. Bu durumda şekil değiştirme işi kuvvetin oluşturduğu momenttir. Castigliano teoreminin genel ifadesi, s s M dM 1 dM δ= ds = M ds EI 0 dW 0 EI dW (1) dir. Burada, “M” kuvvetin oluşturduğu momenti, “E” malzemenin elastiklik modülünü, “I” dM kirişin atalet momentini, kuvvetin oluşturduğu momentteki değişimi ve “ds” integral dW değişkeni olan kirişin sonlu uzunluğunu göstermektedir. Şekil değiştirme işi ya da moment yükleme kuvveti (P), kirişin eğrilik merkezinden ölçülen yarıçap (R) ve eğrilik açısının (Θ) sinüsünün çarpımına eşittir. Moment aşağıdaki gibi ifade edilir. M = PRsin θ (2) Genel castigliano teoreminin integrasyon faktörü “ds” ds = R dθ (3) olarak ifade edilir. Şekil değiştirme işinin kuvvetin bileşenine göre kısmi türevi, kirişin yarıçapı ve şekil değiştirmiş kirişin açısına bağlı olarak ifade edilir. Dikey çökme için kısmi türev, dM = Rsin θ dW V (4) dM = R 1 cos θ dW H (5) ve yatay çökme için de, 76 şeklinde yazılır. Dikey çökmeyi hesaplamak için 2,3 ve 4 numaralı eşitlikler 1 numaralı denklemde yerlerine yazılır. Bunun sonucunda, 1 ΔV = EI π π PR 3 PR sin θ R sin θ R dθ = sin 2 θ dθ 0 EI 0 (6) İntegral alınırsa, yarım daire elemanın dikey yöndeki çökmesi, ΔV = πPR 3 2 EI (7) olur. Yarım daire elemanın yatay çökmesini hesaplamak için Şekil 1'de görüldüğü gibi işlevsiz “H” değişkeni kullanılır. “H” yatay yöndeki hayali kuvvet bileşenini ifade etmektedir. 2, 3 ve 5 numaralı eşitlikler castigliano teoreminin genel ifadesinde yerlerine yazılırsa, ΔH = 1 EI π PRsin θ + HR 1 cosθ R 1 cosθ R dθ 0 elde edilir. “H” hayali kuvvet bileşeni olduğu için sıfır alınır. O zaman Denklem 8, 77 (8) π ΔH = 1 PR 3 sin θ sin θ cos θ dθ EI 0 (9) olur. İntegral işleminin sonucu eğrisel kirişin yatay yöndeki çökmesini verir. 2 PR 3 ΔH = EI (10) Şekil 2: Davite etkiyen kuvvetler ve büyüklükler. Gri renkli kısım yarım davitin yüklemeden önceki durumunu, siyah renkli kısım ise davitin yükleme uygulandıktan sonraki durumunu göstermektedir. Davit elemanının yatay ve dikey çökme miktarlarının hesabı yarım daireden biraz farklıdır. Davit, eğrisel çeyrek daire kiriş ve bu kirişi yere bağlayan düzayaktan oluşur. Bunun anlamı bu elamanının çökme miktarı, eğrisel çeyrek daire kiriş ve düzayak kısmının toplamı şeklinde elde edilecektir. Davitin eğrisel kısmının çökme hesabı için kullanılacak integralin sınırları π 0, 2 dir, çünkü eğrisel kısım çeyrek daire şeklindedir ve düzayak kısmının integral sınırları ise 0, L dir. Yükleme kuvvetinin davit üzerinde oluşturduğu dikey çökmeyi hesaplayabilmek için castigliano teoremi düzayağa göre düzenlenir. 2, 3 ve 4 numaralı denklemler genel castigliano teoreminde yerlerine yazılır ve davitin düz kısmı üzerinde oluşan momenti ifade eden integral denkleme eklenir. 78 π 2 L 1 ΔV = PRsin θ Rsin θ R dθ + PR R dy EI 0 0 (11) P ve R integralin dışına çıkarılırsa, π L 1 32 2 2 ΔV = PR sin θ dθ + PR dy EI 0 0 (12) İntegral işlemi gerçekleştirilirse, ΔV = 1 PR 3 π + PR 2 L EI 4 (13) elde edilir. Denklem 13 düzenlenerek davitin dikey yöndeki çökmesi, ΔV = PR 3π PR 2 L + 4 EI EI (14) bulunur. Davitin yatay yöndeki çökmesi hesaplanırken düz kısım dikey yöndeki ile aynı şekilde hesaba katılır. 2, 3 ve 5 numaralı denklemler genel castigliano teoreminde yerlerine yazılır ve davitin düz kısmı üzerinde oluşan momenti ifade eden integral denkleme eklenerek, π 2 1 ΔH = PRsin θ + HR 1 cos θ R 1 cos θ Rdθ EI 0 1 L + PR + H R + y R + y dy EI 0 “H” sıfır alınırsa, 79 (15) π L 1 32 2 ΔH = PR sin θ sin θ cosθ dθ + P R + Ry dy EI 0 0 ΔH = (16) 1 PR 3 PRL2 2 + PR L + EI 2 2 (17) Denklem 17 düzenlenirse davitin yatay yöndeki çökmesinin veren ifade aşağıdaki gibi olur. PR 3 PRL ΔH = + 2 R + L 2 EI 2 EI (18) 7. Deneyin Yapılışı Deney sırasında 4 farklı test elemanı kullanılmaktadır. Bu elemanların ve düzeneğin özellikleri aşağıdaki tabloda verilmiştir. Test Elemanı Ölçü (mm) Kesit Boyutları (mm) Malzeme: Çelik (Elastisite Modülü ε = 205 kN/mm2) Çember Φ=300 mm 25x3 Yarı Çember R=150 mm 25x3 Çeyrek Çember R=150 mm 25x3 Davit R=150 mm 25x3 Düz Ayak L=75 mm 25x3 Ölçme Aletleri : 3 Adet Komparatör Test elemanları deney düzeneği üzerine yerleştirilerek aşağıdaki 4 deney yapılır. 2.3.Tam Çember Düzeneğin Hazırlanması 2. Çember dar sırtlı bir köşebente asılır. 3. Düşey yüklerin uygulanması için çembere bir adet “C” kanca takılır. 4. Bir komperatör düşey, iki komperatör ise yatay yer değiştirmelerin ölçülmesi için yerleştirilir. 80 Ölçümler 5. Komperatörler sıfırlanır. 6. Yük 5 N’dan 40 N’a kadar 5’er N artırılarak düşey çökme ve yatay deformasyonlar ölçülerek Tablo 1 doldurulur. Tablo 1: Tam Çember Ölçüm Değerleri Yük Düşey (N) Okunan Çökme Okunan (.01 mm) (mm) (.01 mm) δA (.01 mm) Yatay Okunan (.01 mm) δB (.01 mm) Çökme (mm) Not: Yatay sapma, δA ve δB ‘nin toplamıdır. 2.3.Yarım Çember Düzeneğin Hazırlanması 7. Yarım çember tabana tutturulur 8. Özel bir yük askısı, komperatörlere düşey ve yatay ölçme yüzeyleri vermek üzere test modelinin serbest ucundan kancalara takılır 9. İki taşınabilir komperatör modelin serbest ucundaki çökmeleri ölçmek için geçici olarak köşebent üzerine monte edilir Deneyin Yapılışı 10. 2 N’luk bir ağırlık, sistemi dengelemek için yük askısının üzerine yerleştirilir. 11. Komperatör değerleri sıfırlanır. 12. 2 N’dan başlayarak 2’şer N’luk artışlarla 14 N ağırlığa kadar çökme değerleri ölçülerek Tablo 2 doldurulur. Yük (N) Tablo 2: Yarım Çember Ölçüm Değerleri Düşey Yatay Okunan Çökme Okunan Çökme (.01 mm) (mm) (.01 mm) (mm) 2.4.Çeyrek Çember Çeyrek çember, Davit modelinin üst kısmıdır ve eğrinin başlangıcının kelepçe vasıtasıyla sıkıştırılması ile elde edilir. Düzeneğin Hazırlanması 13. Özel bir yük askısı, komperatörlere düşey ve yatay ölçme yüzeyleri vermek üzere test modelinin serbest ucundan kancalara takılır 14. İki taşınabilir komperatör modelin serbest ucundaki çökmeleri ölçmek için geçici olarak köşebent üzerine monte edilir 81 Deneyin Yapılışı 15. 2 N’luk bir ağırlık, sistemi dengelemek için yük askısının üzerine yerleştirilir. 16. Komperatör değerleri sıfırlanır. 17. 2 N’dan başlayarak 2’şer N’luk artışlarla 14 N ağırlığa kadar çökme değerleri ölçülerek Tablo 3 doldurulur. Yük (N) Tablo 3: Çeyrek Çember Ölçüm Değerleri Düşey Yatay Okunan Çökme Okunan Çökme (.01 mm) (mm) (.01 mm) (mm) 2.5.Davit Çeyrek modelin devamı olan düz doğruyla bağlantıyı sağlayan kelepçenin açılmasıyla Davit modeli elde edilir. Düzeneğin Hazırlanması 18. Özel bir yük askısı, komperatörlere düşey ve yatay ölçme yüzeyleri vermek üzere test modelinin serbest ucundan kancalara takılır 19. İki taşınabilir komperatör modelin serbest ucundaki çökmeleri ölçmek için geçici olarak köşebent üzerine monte edilir Deneyin Yapılışı 20. 2 N’luk bir ağırlık, sistemi dengelemek için yük askısının üzerine yerleştirilir. 21. Komperatör değerleri sıfırlanır. 22. 2 N’dan başlayarak 2’şer N’luk artışlarla 14 N ağırlığa kadar çökme değerleri ölçülerek Tablo 4 doldurulur. Yük (N) Tablo 4: Çeyrek Çember Ölçüm Değerleri Düşey Yatay Okunan Çökme Okunan Çökme (.01 mm) (mm) (.01 mm) (mm) 8. Raporun hazırlanması Deneyin sonunda hazırlanacak raporda, Bütün eğrisel aparatlar için yük-çökme grafikleri, noktalar kümesinden geçen en iyi doğruyu tespit ederek çizilecek. Çember, yarım çember, çeyrek çember için, 10 N yük için deneysel sonuçlarla teorik sonuçlar karşılaştırılacak. Deney sırasında oluşan veya oluşabilecek hata kaynakları belirtilecek. 9. Kaynaklar 5. HSM.10 Curved Bars Apparatus Instruction Manual, 1993. 6. http://www.scribd.com/doc/66021725/48248411-Deflection-of-Curved-Beams-1 82
© Copyright 2026 Paperzz