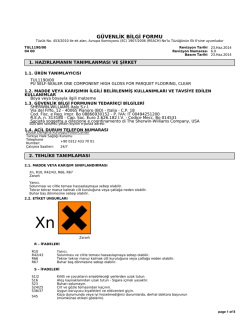
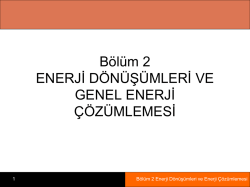
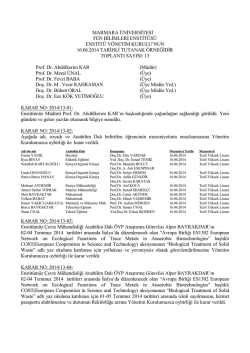
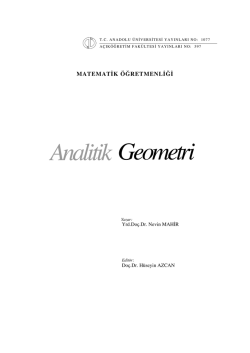
BÖLÜM-4 4.1 ZORLAMALI SALINIMLAR ve REZONANS Önceki bölümde sönümsüz ve sönümlü serbest salınım hareketi yapan değişik sistemleri inceledik. Şimdi salınım yapan mekanik sisteme periyodik değişen bir dış kuvvet uygulandığında meydana gelen olayları inceleyeceğiz. Buna bağlı olarak fizikte ve mühendislikte oldukça önemli bir yeri olan rezonans kavramını tartışacağız. Salınım hareketi yapacak şekilde olan bir sisteme periyodik bir dış kuvvet uygulandığında ortaya çıkan harekete zorlamalı salınım denir. Zorlamalı salınım hareketini, (i) sönümlü olmayan zorlamalı salınım hareketi (undamped forced vibrations) ve (ii) sönümlü zorlamalı salınım hareketi (damped forced vibrations) olmak üzere iki başlık altında ele alacağız. Daha sonra LRC elektrik devresine, dışardan frekansı değişebilen güç uygulandığında devrenin davranışını anlamaya çalışacağız. 4.2 SÖNÜMLÜ OLMAYAN ZORLAMALI SALINIM HAREKETİ Kuvvet sabiti k olan bir yaya m kütleli bir cisim bağlanmış ve sürtünmesiz bir masa üzerinde Şekil-4.1’deki gibi durmaktadır. Şimdi cisme dışardan 𝐹0 𝑐𝑜𝑠𝑡 bağıntısı ile tanımlı periyodik bir dış kuvvetin uygulandığını düşünelim. Şekil-4.1 Sönümlü olmayan zorlamalı salınım hareketi. 2. Newton yasası kullanılarak m kütlesinin hareket denklemini yazabiliriz. 𝑚 𝑑2𝑥 𝑑𝑡 2 = − 𝑘𝑥 + 𝐹0 𝑐𝑜𝑠𝑡 (4.1a) veya 𝑑2𝑥 𝑑𝑡 2 Burada 𝑘 𝑚 = 20 ve 𝐹0 𝑚 + 𝑘 𝑚 𝑥= 𝐹0 𝑚 𝑐𝑜𝑠𝑡 (4.1b) = 𝑓0 alarak hareket denklemini yeniden 𝑑2𝑥 𝑑𝑡 2 + 20 𝑥 = 𝑓0 𝑐𝑜𝑠𝑡 (4.2) 1 formunda yazabiliriz. Bu denklem ikinci derceden, sabit katsayılı, homojen olmayan bir çizgisel diferansiyel denklemdir. Böyle diferansiyel denklemlerin genel çözümü, homojen kısmın çözümü (𝑥ℎ ) ile bir özel çözümün (𝑥𝑝 ) toplamı şeklinde verilir (Bunun için Calculus and analytic geometry; George B. Thomas, Jr. kitabına bakabilirsiniz): 𝑥 = 𝑥ℎ + 𝑥𝑝 (4.3) Bu durumda (4.2) denkleminin homojen kısmının yani 𝑑2𝑥 𝑑𝑡 2 + 20 𝑥 = 0 (4.4) denkleminin çözümü için, 𝑥ℎ (𝑡) = 𝐶1 𝑐𝑜𝑠𝜔0 𝑡 + 𝐶2 𝑠𝑖𝑛𝜔0 𝑡 (4.5) yazabileceğini biliyoruz (BHH konusunu işlerken görmüştük). Şimdi (4.2) denklemi için özel bir çözüm (𝑥𝑝 ) arayacağız. İncelemeyi (i) 𝜔 ≠ 𝜔0 ve (ii) 𝜔 = 𝜔0 gibi iki farklı durum için ele alacağız. (i) 𝜔 ≠ 𝜔0 durumu için (4.2) denkleminin özel çözümü için 𝑥𝑝 (𝑡) = 𝐴𝑐𝑜𝑠𝜔𝑡 + 𝐵𝑠𝑖𝑛𝜔𝑡 (4.6) seçebiliriz. Bunun çözüm olabilmesi için (4.2) denklemini sağlaması gerekir. 𝑥𝑝 ’in t’ye göre ikinci türevini hesaplayalım: 𝑑𝑥𝑝 𝑑𝑡 𝑑 2 𝑥𝑝 𝑑𝑡 2 = −𝐴𝜔𝑠𝑖𝑛𝜔𝑡 + 𝐵𝜔𝑐𝑜𝑠𝜔𝑡 (4.7a) = −𝐴𝜔2 𝑠𝑖𝑛𝜔𝑡 − 𝐵𝜔2 𝑐𝑜𝑠𝜔𝑡 = −𝜔2 (𝐴𝑐𝑜𝑠𝜔𝑡 + 𝐵𝑠𝑖𝑛𝜔𝑡) = −𝜔2 𝑥𝑝 (4.7b) Bu sonucu (4.2) denkleminde yerine yazarak 𝑥𝑝 özel çözümü için 𝑑2𝑥 + 20 𝑥 = 𝑓0 𝑐𝑜𝑠𝑡 2 𝑑𝑡 −𝜔2 𝑥𝑝 + 20 𝑥𝑝 = 𝑓0 𝑐𝑜𝑠𝑡 𝑥𝑝 (20 − 𝜔2 ) = 𝑓0 𝑐𝑜𝑠𝑡 𝑥𝑝 = 𝑓0 2 0 −𝜔2 𝑐𝑜𝑠𝑡 (4.8) sonucunu elde ederiz. 2 Bu durumda (4.2) denkleminin genel çözümü için 𝑥(𝑡) = 𝐶1 𝑐𝑜𝑠𝜔0 𝑡 + 𝐶2 𝑠𝑖𝑛𝜔0 𝑡 + 𝑓0 2 0 −𝜔2 𝑐𝑜𝑠𝑡 (4.9) yazabiliriz. Başlangıç koşulları olarak 𝑥(0) = 0 ve 𝑑𝑥(0) 𝑑𝑡 =0 (4.10) seçelim. Bunları (4.9) denkleminde kullanarak 𝐶1 ve 𝐶2 sabitleri için 𝐶1 = − 𝑓0 20 −𝜔2 ve 𝐶2 = 0 (4.11) sonucunu elde ederiz. Bu değerleri (4.9) denkleminde kullanarak genel çözüm için 𝑥(𝑡) = − 𝑓0 2 0 −𝜔2 𝑐𝑜𝑠𝜔0 𝑡 + 𝑓0 2 0 −𝜔2 cos 𝑡 = 𝑓0 2 0 −𝜔2 (cos 𝑡 − 𝑐𝑜𝑠𝜔0 𝑡) (4.12) yazabiliriz. Burada 𝑐𝑜𝑠𝐴 − 𝑐𝑜𝑠𝐵 = −2𝑠𝑖𝑛 𝐴+𝐵 2 𝑠𝑖𝑛 𝐴−𝐵 (4.13) 2 trigonometrik özdeşliği kullanılarak 𝑥(𝑡) çözümü için 𝑥(𝑡) = [ 2𝑓0 2 0 −𝜔2 𝑠𝑖𝑛 𝜔0 − 2 𝑡] 𝑠𝑖𝑛 𝜔0 + 2 𝑡 ifadesini yazmak zor değildir. Bu ifadede yüksek frekanslı 𝑠𝑖𝑛 genliği, düşük frekanslı 𝑠𝑖𝑛 𝜔0 − 2 (4.14) 𝜔0 + 2 𝑡 fonksiyonunun 𝑡 fonksiyonu tarafından modüle edilir. Bu davranışın vuru (beat) olayı olduğunu biliyorsunuz. Şekil-4.2’de tipik bir örnek verilmiştir. Şekil-4.2. Eşitlik-4.14 ile tanımlı 𝑥(𝑡) fonksiyonunun grafiği. Şeklin çiziminde 𝜔0 = 12 𝑠 −1 , 𝜔 = 11 𝑠 −1 , 𝑓0 = 1 N/kg alınmıştır. 3 (ii) 𝜔 = 𝜔0 durumu için (4.2) denkleminin özel çözümü için ise 𝑥𝑝 (𝑡) = 𝐴1 𝑡𝑐𝑜𝑠𝜔0 𝑡 + 𝐴2 𝑡𝑠𝑖𝑛𝜔0 𝑡 seçeceğiz. Daha öncekine benzer şekilde 𝑑𝑥𝑝 𝑑𝑡 ve 𝑑 2 𝑥𝑝 𝑑𝑡 2 (4.15) türevlerini alalım, 𝑑𝑥𝑝 = 𝐴1 𝑐𝑜𝑠𝜔0 𝑡 + 𝐴2 𝑠𝑖𝑛𝜔0 𝑡 − 𝐴1 𝑡𝜔0 𝑠𝑖𝑛𝜔0 𝑡 + 𝐴2 𝑡𝜔0 𝑐𝑜𝑠𝜔0 𝑡 𝑑𝑡 𝑑 2 𝑥𝑝 = −𝐴1 𝜔0 𝑠𝑖𝑛𝜔0 𝑡 + 𝐴2 𝜔0 𝑐𝑜𝑠𝜔0 𝑡 − 𝐴1 𝜔0 𝑠𝑖𝑛𝜔0 𝑡 + 𝐴2 𝜔0 𝑐𝑜𝑠𝜔0 𝑡 𝑑𝑡 2 − 𝐴1 𝑡20 𝑐𝑜𝑠𝜔0 𝑡 − 𝐴2 𝑡20 𝑠𝑖𝑛𝜔0 𝑡 veya 𝑑 2 𝑥𝑝 = −2𝐴1 𝜔0 𝑠𝑖𝑛𝜔0 𝑡 + 2𝐴2 𝜔0 𝑐𝑜𝑠𝜔0 𝑡 − 20 (𝐴1 𝑡𝑐𝑜𝑠𝜔0 𝑡 + 𝐴2 𝑡𝑠𝑖𝑛𝜔0 𝑡) 𝑑𝑡 2 veya 𝑑 2 𝑥𝑝 𝑑𝑡 2 = −2𝐴1 𝜔0 𝑠𝑖𝑛𝜔0 𝑡 + 2𝐴2 𝜔0 𝑐𝑜𝑠𝜔0 𝑡 − 20 𝑥𝑝 (4.16) elde ederiz. Bu değeri 𝑑2𝑥 + 20 𝑥 = 𝑓0 𝑐𝑜𝑠𝑡 𝑑𝑡 2 denkleminde yerine yazarak (burada = 𝜔0 olduğunu tekrar hatırlatalım) −2𝐴1 𝜔0 𝑠𝑖𝑛𝜔0 𝑡 + 2𝐴2 𝜔0 𝑐𝑜𝑠𝜔0 𝑡 − 20 𝑥𝑝 + 20 𝑥𝑝 = 𝑓0 𝑐𝑜𝑠𝜔0 𝑡 veya −2𝐴1 𝜔0 𝑠𝑖𝑛𝜔0 𝑡 + 2𝐴2 𝜔0 𝑐𝑜𝑠𝜔0 𝑡 = 𝑓0 𝑐𝑜𝑠𝜔0 𝑡 (4.17) yazabiliriz. Bu eşitliğin her zaman sağlanabilmesi için 2𝐴1 𝜔0 = 0 ve 2𝐴2 𝜔0 = 𝑓0 olmalıdır. Buradan 𝐴1 ve 𝐴2 sabitleri için 𝐴1 = 0 ve 𝐴2 = (4.18) 𝑓0 2𝜔0 elde edilir. Bu durumda özel çözüm için 𝑥𝑝 (𝑡) = 𝑓0 2𝜔0 𝑡𝑠𝑖𝑛𝜔0 𝑡 (4.19) ifadesini elde ederiz. Genel çözüm için ise 𝑥(𝑡) = 𝐶1 𝑐𝑜𝑠𝜔0 𝑡 + 𝐶2 𝑠𝑖𝑛𝜔0 𝑡 + 𝑓0 2𝜔0 𝑡𝑠𝑖𝑛𝜔0 𝑡 (4.20) yazabiliriz. 4 Homojen kısmın çözümünü 𝑥ℎ = 𝐶1 𝑐𝑜𝑠𝜔0 𝑡 + 𝐶2 𝑠𝑖𝑛𝜔0 𝑡 = 𝐴0 𝑐𝑜𝑠(𝜔0 𝑡 + ) formatında ifade edebiliriz. Burada (4.19 ve 4.20) bağıntılarını kullanarak genel çözüm için 𝑥(𝑡) = 𝐴0 𝑐𝑜𝑠(𝜔0 𝑡 + ) + 𝑓0 2𝜔0 𝑡𝑠𝑖𝑛𝜔0 𝑡 (4.21) ifadesini yazmak mümkündür. 𝑥ℎ = 𝐴0 𝑐𝑜𝑠(𝜔0 𝑡 + ) fonksiyonu kararlı salınan bir fonksiyondur. Ancak fonksiyonunun genliği( 𝑓0 2𝜔0 𝑓0 2𝜔0 𝑡𝑠𝑖𝑛𝜔0 𝑡 𝑡) zamanla lineer olarak artmaktadır (Şekil-4.3). Bu nedenle zaman ilerledikçe sistemdeki yay daha fazla dayanamayacak ve kırılacaktır (Rezonans durumu). Şekil-4.3 𝑥(𝑡) = 𝐴0 𝑐𝑜𝑠(𝜔0 𝑡 + ) + 𝑓0 2𝜔0 𝑡𝑠𝑖𝑛𝜔0 𝑡 fonksiyonunun grafiği. 𝑓0 = 1, 𝐴0 = 1, 𝜔0 =3 ve 𝜑 = 0 seçilmiştir. Şimdi 𝜔 ≠ 𝜔0 durumu için elde edilen (4.9) eşitliği ile verilen genel çözüm ifadesine yeniden bakalım 𝑥(𝑡) = 𝐴0 𝑐𝑜𝑠(𝜔0 𝑡 + ) + 𝑓0 2 0 −𝜔2 𝑐𝑜𝑠𝑡 (4.23) Homojen kısmın çözümünün 𝐴0 genliği sabittir. Ancak özel çözümün genliği dış kuvvetin frekansına () bağlı değişir. Bu kısmın genliğini 𝐶(𝜔) = 𝑓0 2 0 −𝜔2 (4.24) ile gösterelim. 𝐶(𝜔)’nin 𝜔’ya göre grafiği Şekil-4.4’de gösterilmiştir. 5 Şekil-4.4. 𝐶(𝜔)’nin işaretine bakmaksızın = 𝜔0 durumunda 𝐶(𝜔)’nin sonsuz büyük olması durumu ortaya çıkar. Başka bir deyişle eğer sisteme uygulanan periyodik dış kuvvetin frekansı (𝜔), titreşen sistemin doğal frekansına (𝜔0 = √𝑘/𝑚) yakın ise, titreşimlerin genliği küçük bir kuvvet uygulanmasıyla oldukça büyük yapılabilir. Salınan sistemde doğal titreşimlerin frekansının periyodik dış kuvvetin frekansına eşit olması durumunda (𝜔 = 𝜔0 ) genliğin maksimum değere ulaşmasına rezonans olayı denir. Şimdi ≠ 0 durumunda olaya başka a bir yolla yaklaşalım. Yukarıda verilen (4.2) eşitliğini tekrar yazalım, 𝑑2𝑥 𝑑𝑡 2 + 20 𝑥 = 𝑓0 𝑐𝑜𝑠𝑡 Bu denklemin genel çözümü için 𝑥 = 𝐴𝑐𝑜𝑠(𝑡 − 𝛿) (4.25) şeklinde bir fonksiyon seçebiliriz. Burada 𝐴 titreşimin genliği olup her zaman pozitiftir ve titreşim frekansına bağlı olarak değişir 𝐴(𝜔); 𝛿 ise uygulanan periyodik dış kuvvet (𝐹0 𝑐𝑜𝑠𝑡) ile yer değiştirme (𝑥) arasındaki faz farkıdır. Eşitlik (4.25)’i ve ikinci türevini (4.2) denkleminde yerine koyalım. 𝑑2𝑥 = −2 𝐴𝑐𝑜𝑠(𝑡 − 𝛿) 2 𝑑𝑡 −2 𝐴𝑐𝑜𝑠(𝑡 − 𝛿) + 20 𝐴𝑐𝑜𝑠(𝑡 − 𝛿) = 𝑓0 𝑐𝑜𝑠𝑡 sonucunu elde ederiz. cos(𝐴 ∓ 𝐵) = 𝑐𝑜𝑠𝐴𝑐𝑜𝑠𝐵 ± 𝑠𝑖𝑛𝐵𝑠𝑖𝑛𝐴 trigonometrik özdeşliğinden yararlanarak, 6 −2 𝐴(𝑐𝑜𝑠𝑡 𝑐𝑜𝑠𝛿 + 𝑠𝑖𝑛𝑡 𝑠𝑖𝑛𝛿) + 20 𝐴(𝑐𝑜𝑠𝑡 𝑐𝑜𝑠𝛿 + 𝑠𝑖𝑛𝑡 𝑠𝑖𝑛𝛿) = 𝑓0 𝑐𝑜𝑠𝑡 veya 𝐴(20 − 2 )𝑐𝑜𝑠𝛿 𝑐𝑜𝑠𝑡 + 𝐴(20 − 2 )𝑠𝑖𝑛𝛿𝑠𝑖𝑛𝑡 = 𝑓0 𝑐𝑜𝑠𝑡 (4.26) yazılabilir. Bu trigonometrik eşitliğin her an sağlanması için gerek ve yeter koşulu 𝐴(20 − 2 )𝑠𝑖𝑛𝛿 = 0 (4.27a) 𝐴(20 − 2 )𝑐𝑜𝑠𝛿 = 𝑓0 (4.27b) olmasıdır. Bu iki eşitliği birlikte değerlendirdiğimizde (taraf tarafa oranladığımızda) 𝑡𝑎𝑛 𝛿 = 0 (4.28) elde ederiz. Buradan 𝛿 faz açısı için 𝛿 = 0 veya 𝛿 = 𝜋 sonucu elde edilir. 𝛿 = 0, olduğu durumda, (4.27b) eşitliğinden titreşim genliği için 𝐴 = 𝐴( ) = 𝑓0 2 (0 −2 ) (4.29) ifadesi elde edilir. Bu ifade de görüldüğü gibi genlik frekansa bağlıdır ve A’nın pozitif olabilmesi için < 0 olmak zorundadır. 𝛿 = , olduğu durumda, (4.27b) eşitliğinden titreşim genliği için 𝐴=− 𝑓0 (20 − 2 ) ifadesi elde edilir. A’nın pozitif olabilmesi için > 0 koşulunun sağlanması gerekmektedir. Bu durumda sönümsüz zorlamalı hareketin yerdeğiştirmesi (x) için 𝛿 = 0 , < 0 , 𝐴 = 𝑥(𝑡) = 𝐴()𝑐𝑜𝑠(𝑡 − 𝛿) 𝑓0 2 (0 −2 ) 𝛿 = 𝜋 , > 0 , 𝐴 = − 𝑓0 2 (0 −2 ) (4.30) ifadesini yazabiliriz. Şimdi 𝐴() = 𝑓0 2 (0 −2 ) genliğinin ’nın değerine bağlı davranışı için 𝑓0 → 0 𝑖ç𝑖𝑛 𝐴() → → 0 𝑖ç𝑖𝑛 𝐴() → ∞ → ∞ 𝑖ç𝑖𝑛 𝐴() → 0 20 = 𝐹0 /𝑚 20 = 𝐹0 𝑘 7 yazabiliriz. Bu durumda 𝐴() genliğinin frekansına bağlı davranışı Şekil-4.5a’deki gibi olacaktır. Faz farkı () ise = 0 değerinde 0’dan ’ye atlayacaktır (Şekil-4.5b). Şekil-4.5 (a). Sönümsüz zoruna salınımların genliğinin periyodik dış kuvvetin frekansına bağlı değişimi. (b). Sönümsüz zoruna salınımların yerdeğiştirmesi ile periyodik dış kuvvet arasındaki faz farkının dışkuvvetin frekansına bağlı değişimi A (𝜔)’nin = 𝜔0 değerinde sonsuz büyük olması durumu ortaya çıkar. Başka bir deyişle sisteme uygulanan periyodik dış kuvvetin frekansı (𝜔), titreşen sistemin doğal frekansına ( 𝜔0 = √𝑘/𝑚 ) yakın ise, titreşimlerin genliği küçük bir kuvvet uygulanmasıyla oldukça büyük yapılabilir. Salınan sistemde doğal titreşimlerin frekansının periyodik dış kuvvetin frekansına eşit olması durumunda (𝜔 = 𝜔0 ) genliğin maksimum değere ulaşmasına rezonans olayı denir. 4.3 SÖNÜMLÜ ZORLAMALI SALINIM HAREKETİ Daha önce sönümlü salınım hareketi yapan kütle-yay sistemini incelemiştik. Şimdi benzer bir sistemi ele alacağız. Ancak bu kez kütleye 𝐹 = 𝐹0 𝑐𝑜𝑠𝑡 gibi periyodik bir dış kuvvet uygulayacağız (Şekil-4.6). Şekil-4.6 Sönümlü zorlamalı salınım hareketi. 8 Bu sistemin hareket denklemi için 𝑚 𝑑2𝑥 𝑑𝑡 2 +𝑏 𝑑𝑥 𝑑𝑡 + 𝑘𝑥 = 𝐹0 𝑐𝑜𝑠𝑡 (4.31a) yazabiliriz. Bu denklemi yeniden 𝑑2𝑥 𝑑𝑡 2 + 𝑏 𝑑𝑥 𝑥= 𝐹0 = 20 ve 𝐹0 + 𝑚 𝑑𝑡 𝑘 𝑚 𝑚 𝑐𝑜𝑠𝑡 (4 .31b) = 𝑓0 (4.31c) veya daha önce yaptığımız gibi 𝑏 𝑚 yazarak 𝑑2𝑥 𝑑𝑡 2 =𝛾, +𝛾 𝑘 𝑚 𝑑𝑥 𝑑𝑡 𝑚 + 20 𝑥 = 𝑓0 𝑐𝑜𝑠𝑡 (4.31d) formatında yazabiliriz. Bu denklemin homojen kısmının çözümü için 𝑑2𝑥 𝑑𝑡 2 +𝛾 𝑑𝑥 𝑑𝑡 + 20 𝑥 = 0 (4.32) 𝛾𝑡 𝑥ℎ (𝑡) = 𝐴0 𝑒 − 2 𝑐𝑜𝑠(1 𝑡 − ) (4.33) ifadesinin verildiğini biliyoruz (Sönümlü harmonik hareket konusunda işlendi). Burada ω12 = 20 − 𝛾2 4 = 𝑘 𝑚 − 𝑏2 4𝑚2 (4.34) olduğunu hatırlayalım (Daha önce anlatılan konularda verilmişti, Eşitlik-3.57). Özel çözüm ise 𝑥𝑝 = 𝑓0 2 √(20 −2 ) +𝛾2 2 𝑐𝑜𝑠(𝑡 − ) (4.35) ifadesi ile verilebilir (Özel çözümün elde edilmesi için: Calculus and analytic geometry; George B. Thomas, Jr. kitabına bakabilirsiniz. Örnek-1’de verilen problemin çözümünü incelemeniz önerilir.). Burada açısı Şekil-4.7 ile tanımlıdır. Şekil-4.7 Faz sabitinin geometrik temsili. 9 Bu dik üçgenden 𝑠𝑖𝑛 = 𝑐𝑜𝑠 = 𝛾 (4.36a) 2 √(20 −2 ) +𝛾2 2 20 −2 (4.36b) 2 √(20 −2 ) +𝛾2 2 𝑡𝑎𝑛 = 𝛾 (4.36c) 20 −2 ifadelerini yazabiliriz. Bu durumda (4.31d) denkleminin genel çözümü için 𝑥(𝑡) = 𝑥ℎ (𝑡) + 𝑥𝑝 (𝑡) 𝛾𝑡 𝑥(𝑡) = ⏟ 𝐴0 𝑒 − 2 𝑐𝑜𝑠(1 𝑡 − ) + GEÇİCİ ÇÖZÜM(bak.3.57) 𝑓0 2 √(20 −2 ) +𝛾2 2 ⏟ 𝑐𝑜𝑠(𝑡 − ) (4.37) KALICI ÇÖZÜM yazabiliriz. Burada 1 = (𝜔02 − 𝛾2 1/2 ) 4 dir (Eşitlik-3.57’ye tekrar bakınız). Homojen kısmın çözümü 𝑥ℎ (𝑡) kısa süre içerisinde söner. Bu nedenle homojen kısmın çözümüne geçici çözüm denir. Özel çözüm 𝑥𝑝 (𝑡) ise kalıcı çözüm veya kararlı durum (steady state) olarak adlandırılır. Bu nedenle çoğu kez geçici çözümü dikkate almaya gerek kalmaz (Şekil-4.8). Şekil-4.8. Periyodik bir dış kuvvet ile sönümlü salınımın geçiş davranışına bir örnek (Şeklin çiziminde 𝜔 = 30 𝑠 −1 ; 𝜔0 = 40 𝑠 −1 ; 𝛾 = 20 𝑠 −1 ; 𝑓0 = 2 𝑁/𝑘𝑔 ; 𝛿 = 0 ; = 0 ve 𝐴0 = 0,02 𝑚 alınmıştır.) Bu durumda genel çözüm için 𝑥(𝑡) = 𝐴()𝑐𝑜𝑠(𝑡 − ) (4.38) 10 ifadesini almak yeterli olacaktır. Genel çözümün frekansı uygulanan 𝐹 = 𝐹0 𝑐𝑜𝑠𝑡 dış kuvvetinin frekansı ile aynıdır. Ancak aralarında kadar faz farkı vardır. 𝐴( ) genliğini ele alalım: 𝐴() = 𝑓0 (4.39) 2 √(20 −2 ) +𝛾2 2 genliğinin minimum olmasının bir önemi yoktur. Fakat maksimum olması sisteme zarar verebilmesi açısından önemlidir. A'nın maksimum olması için paydasının minimum olması gerekir. 𝑢 = (20 − 2 )2 + 𝛾 2 2 (4.40a) diyelim. 𝑑𝑢 𝑑 = 0 ve 𝑑2𝑢 > 0 olursa u'nun değeri minimum olur. 𝑑 2 𝑑𝑢 𝑑 = 2(20 − 2 )(−2) + 2𝛾 2 = [−4(20 − 2 ) + 2𝛾 2 ] = 0 (4.40b) Bu denklemin iki çözümü vardır: 𝑑𝑢 (i) =0 (ii) −4(20 − 2 ) + 2𝛾 2 = 0 olmalıdır. Buradan için için 𝑑 = 0 olur ancak bu durumun fiziksel karşılığı yoktur. 1 = √20 − 𝛾 2 (4.41) 2 elde ederiz. ’nın bu değerinde u’nun bir ekstrem değeri vardır. Ancak ’nın bu değerinde u’nun minimum olabilmesi için ikinci türevin pozitif olması gerekir( 𝑑2𝑢 𝑑2 = √20 − 𝑑2𝑢 𝑑2 𝛾2 2 𝑑2𝑢 𝑑 2 > 0) = 12𝜔2 − 4𝜔02 + 2𝛾 2 değerinde = 12 (20 − 𝛾2 ) − 420 + 2𝛾 2 = 820 − 4𝛾 2 = 8 (20 − 2 𝛾2 2 ) >0 olduğunu göstermek zor değildir. Bu durumda = √20 − 𝛾2 2 için u'nun değeri minimum ve dolaysıyla 𝐴()'nın değeri maksimumdur. ’nın bu değerini (4.40a) denkleminde yerine yazarsak 11 𝑢𝑚𝑖𝑛 = = (20 𝛾4 4 𝛾2 2 𝛾2 𝛾4 𝛾2 2 2 2 2 − + ) + 𝛾 (0 − ) = + 𝛾 (0 − ) 0 2 2 4 2 2 + 𝛾 2 20 − 𝛾4 2 = 𝛾 2 20 − 𝛾4 4 = 𝛾 2 (20 − 𝛾2 4 ) veya √𝑢𝑚𝑖𝑛 = 𝛾 (20 − 𝛾2 4 1⁄ 2 ) (4.42) elde ederiz. Bu değeri (4.39)'de yerine yazar ve 𝛾 = 0 ⁄𝑄 ifadesini kullanırsak genliğin maksimum değeri (𝐴𝑚𝑎𝑥 ) için 𝐴𝑚𝑎𝑥 = 𝑓0 √𝑢𝑚𝑖𝑛 = 𝑓0 1⁄ 2 𝛾2 𝛾(20 − ) 4 = 𝑓0 1 2 ⁄2 0 1 0 2 (0 − 4 2 ) 𝑄 𝑄 = (𝐹0 ⁄𝑚)𝑄 1⁄ 2 1 20 (1− 2 ) 4𝑄 = (𝐹0 ⁄𝑘 )𝑄 1⁄ 2 1 (1− 2 ) 4𝑄 (4.43) sonucunu elde ederiz. Bundan sonra genliği maksimum yapan frekansı 𝑅 ile göstereceğiz. 𝑅 = √20 − 𝛾2 2 = 0 √1 − 1 2𝑄2 (4.44) Bu ifadeden de anlaşılacağı gibi 𝑅 < 0 olacağı açıktır. Burada 𝑄 = 0 / kalite faktörüdür. Periyodik dış kuvvetin ( 𝐹 = 𝐹0 𝐶𝑜𝑠𝑡 ) etkisi ile titreşim hareketinin genliğinin maksimum olmasına rezonans ve 𝑅 açısal frekansına da rezonans frekansı denir. Genliğin (A) ve faz sabitinin (), uygulanan 𝐹 = 𝐹0 𝑐𝑜𝑠𝑡 dış kuvvetinin açısal frekansına bağlı davranışı Şekil-4.9’de verilmiştir. Burada 𝑚𝑎𝑥 rezonans frekansını (𝑅 ) göstermektedir. 𝑄 ≫ 1 olduğunda 𝑚𝑎𝑥 = 𝑅 ≅ 0 alınabileceğini tekrar hatırlatalım. 12 Şekil-4.9 (a) Genliğin ve (b) faz sabitinin sürücü kuvvetin frekansına bağlı değişimi. Mekanik sistemlerin zarar görmesine neden olacağı için, sistemin uzun süre rezonansta kalması istenmez (Köprülerin yıkılması, binaların zarar görmesi gibi). Bazı durumlarda ise sistemin kısa zaman aralıklarında rezonansa girmesi istenir. Örneğin sağlık alanında çok kullanılan MR görüntüleme cihazlarının çalışma prensibinin temeli "manyetik rezonans” olayıdır. Kızıl ötesi spektroskopisinde ise bir molekül üzerine frekansı belirli bir aralıkta değiştirilen elektromanyetik dalgalar (kızıl ötesi ışınlar) gönderilir. Rezonans durumunda, gönderilen elektromanyetik dalganın enerjisini molekülün atomları soğurur. Maddeden geçen dalga şiddetinin azaldığı frekanslar rezonans frekanslarıdır. Bu rezonans frekanslarından hareketle moleküllerin yapısı hakkında bilgi elde edilir. Bu gibi nedenlerden dolayı rezonans kavramının iyi anlaşılması gerekir. 4.3.1 Sönümlü zorlamalı salınım hareketinin kompleks üstel fonksiyon ile incelenmesi Sönümlü zorlamalı salınım hareketinin denklemi 𝑑2𝑥 𝑑𝑡 2 +𝛾 𝑑𝑥 𝑑𝑡 + 20 𝑥 = 𝐹0 𝑚 𝑐𝑜𝑠𝑡 ile verildiğini görmüştük (Eşitlik-4.31d). Bu denklemin çözümü için 𝑥(𝑡) = 𝐴() cos(𝑡 − ) 13 ifadesini vermiştik (Eşitlik-4.38). 𝐴() ve 'yi 'nın fonksiyonu olarak elde etmiştik (Eşitlik-4.2-6 ve4.2- 9 bakınız). Burada Eşitlik-4.31d ile verilen denklemi kompleks gösterimde 𝑑2𝑧 𝑑𝑡 2 +𝛾 𝑑𝑧 𝑑𝑡 + 20 𝑧 = 𝐹0 𝑚 𝑒 𝑖𝑡 (4.45) şeklinde yazabiliriz. Bu diferansiyel denklem için 𝑧 = 𝐴()𝑒 𝑖(𝑡−) (4.46) ifadesini çözüm olarak kabul edebiliriz. 2 Denklem (4.46)’in 𝑑𝑧 ve 𝑑𝑑𝑡 𝑧2 türevlerini alarak denklem (4.45)’de yerine yazarsak, 𝑑𝑡 [−2 + 𝑖𝛾 + 20 ]𝐴()𝑒 𝑖(𝑡−) = 𝐹0 𝑚 𝑒 𝑖𝑡 elde ederiz. Her iki tarafı 𝑒 𝑖(𝑡−) 'ye bölerek (20 − 2 )𝐴() + 𝑖𝛾𝐴() = 𝐹0 𝑚 𝑒 𝑖 (4-46) elde ederiz. Bu ifade kompleks düzlemde bir vektörle temsil edilebilir (Şekil-4.10). Eşitlik-4.46’yı geometrik olarak yorumlayabiliriz. Bu ifadenin sol tarafı (20 − 2 )𝐴() uzunluğundaki bir reel (gerçek) vektörün ucuna uzunluğu 𝛾𝐴() olan imajiner (sanal) vektörün ilave edileceğini söyler. Sağ taraf ise reel eksen ile açısı yapan 𝐹0 𝑚 uzunluğunda bir vektörün çizileceğini söyler. Şekil-4.10 Eşitlik-4.46’nın kompleks düzlemde geometrik temsili. (4.46) eşitliğinin sağ tarafını 𝐹0 𝑚 (𝑐𝑜𝑠 + 𝑖𝑠𝑖𝑛) şeklinde yazabiliriz. Bu durumda bu denklemi (20 − 2 )𝐴() + 𝑖𝛾𝐴() = 𝐹0 𝑚 (𝑐𝑜𝑠 + 𝑖𝑠𝑖𝑛) (4.47) şeklinde yazabiliriz. Bu eşitliğin sanal ve gerçek kısımları birbirine eşitlenirse 𝛾𝐴() = 𝐹0 𝑚 𝑠𝑖𝑛 (4.48a) 14 (20 − 2 )𝐴() = 𝐹0 𝑚 𝑐𝑜𝑠 (4.48b) elde edilir. Bu eşitlikleri taraf tarafa oranlayarak faz farkı için 𝛾 𝑡𝑎𝑛 () = (4.49) 20 −2 ifadesini elde ederiz. (4.48a) ve (4.48b) eşitliklerinin her iki tarafının kareleri alınıp, taraf tarafa toplanırsa 𝐹 2 [ (20 − 2 )2 + 𝛾 2 2 ]𝐴2 () = (𝑚0) sonucu elde edilir. Buradan 𝐴() genliği için 𝐴() = 𝐹0 ⁄𝑚 1 ⁄ [(20 − 2 )2 +𝛾2 2 ] 2 (4.50) ifadesini elde ederiz. Bu sonuçları daha önce de türetmiştik. Ancak kompleks formun kullanımının çok daha kolay olduğuna dikkat ediniz. 4.4 ZORLAMALI SALINIMLARDA GÜÇ SOĞURULMASI Sönümlü salınımlarda, sürtünme kuvvetleri nedeniyle salınım hareketi enerji kaybeder. Sürücü kuvvet kayıp enerjiyi karşılamaya çalışır. Şimdi söndürücü kuvvetin hızla orantılı olduğu (F=-bv) durumu ele alalım. Kalıcı çözümün 𝑥(𝑡) = 𝐴()𝑐𝑜𝑠(𝑡 − ) (4.51) ifadesi ile verildiğini hatırlayalım. Burada 𝐴() = 𝑓0 √(20 −2 )2 +2 𝛾2 dir. Bu fonksiyon kullanılarak hız için 𝑣= 𝑑𝑥 𝑑𝑡 = −𝐴()𝑆𝑖𝑛(t − ) = −𝑣0 ()𝑆𝑖𝑛(𝑡 − ) (4.52) ifadesini elde ederiz. Burada 𝑣0 () = 𝐴(). , v hızının genliğidir. 𝑣0 () için 𝑣0 () = 𝑓0 √(20 −2 )2 +𝛾2 2 (4.53) yazılacağı açıktır. Burada (20 − 2 ) ifadesini 20 − 2 = ( 𝜔0 𝜔 − 𝜔 𝜔0 )(𝜔0 𝜔) (4.54) 15 biçiminde yazarak 𝑣0 ()için verilen ifadeyi 𝑣0 () = 𝑓0 𝜔 (4.55) 𝜔 0 √( 𝜔 −𝜔 )2 20 +𝛾2 0 formunda yazılabiliriz. 𝜔 → 0 iken 𝑣0 () → 0 ve 𝜔 → ∞ iken 𝑣0 () → 0 dir. = 𝜔0 değerinde payda en küçük değeri alacağından 𝑣0 () değeri maksimumdan geçer ve maksimum değer 𝑓0 /𝛾’ya eşittir. Mekanik derslerinden ani gücün (P) kuvvet ile hızın çarpımı şeklinde verildiğini biliyoruz, buradan ani güç için 𝑃(𝑡) = 𝐹. 𝑣 = (𝑏𝑣)𝑣 = 𝑏𝑣 2 (4.56) ifadesini yazabiliriz. Bu ifadede v hızı yerine (4.52) eşitliğinde verilen değerini yazarsak 𝑃(𝑡) gücü için 𝑃(𝑡) = 𝑏[𝐴()]2 𝑠𝑖𝑛2 (𝑡 − ) = 𝑏[𝑣0 ()]2 𝑠𝑖𝑛2 (𝑡 − ) (4.57) bağıntısını elde ederiz. Bir periyotluk (T) süreçte soğrulan ortalama güç 1 𝑡 +𝑇 𝑃̅() = ∫𝑡 0 𝑃(𝑡) 𝑑𝑡 𝑇 (4.58) 0 bağıntısı kullanılarak hesaplanabilir. 1 𝑡0+𝑇 𝑃̅() = ∫ 𝑏⦋[𝑣0 ()]⦌2 𝑠𝑖𝑛2 (𝑡 − ) 𝑑𝑡 𝑇 𝑡0 = 𝑏⦋[𝑣0 ()]⦌2 𝑇 𝑐𝑜𝑠2𝐴 = 𝑐𝑜𝑠 2 𝐴 − 𝑠𝑖𝑛2 𝐴 = 1 − 2𝑠𝑖𝑛2 𝐴 𝑡0 +𝑇 ∫𝑡 0 𝑠𝑖𝑛2 (𝑡 − ) 𝑑𝑡 𝑠𝑖𝑛2 𝐴 = => (4.59) 1−𝑐𝑜𝑠2𝐴 bağıntısından 2 yararlanarak 2 2 t0 +T 1−cos2(t−) t0 +T b⦋[v0 ()]⦌ b⦋[v0 ()]⦌ ̅ P() = [ ] dt = T−∫ cos2(t − ) dt] [ ∫ t t ⏟ T 2 2T 0 0 0 2 𝑏[𝑣 ()] 𝑃̅() = 0 2 elde edilir. Şimdi 𝑏 = 𝑚𝛾, 𝑓0 = 𝐹0 𝑚 (4.60) ve 𝑣0 () değerleri ortalama güç ifadesindeki yerine konulursa, 𝑃̅() = 2 𝐹0 2 𝛾 2 2𝑚[(0 −2 )2 +2 2 ] (4.61) sonucu elde edilir. 16 4.4.1 Güç rezonans eğrisi Ortalama gücün 𝑃̅() , 'ya karşı grafiği osilatörün güç rezonans eğrisi (power resonance curve) olarak adlandırılır (Şekil-4.11). Şekil-4.11 Ortalama gücün frekansa bağlı davranışı (Güç-rezonans eğrisi). →0 iken ̅𝑃() → 0 ve → ∞ iken ̅𝑃() → 0 olduğundan = 0 iken ̅𝑃() 'nın değeri maksimum olur. Rezonans eğrisinin yarı yükseklikteki ( ̅𝑃()/2 ) genişliği 𝑓𝑤ℎℎ ile gösterilir ve önemli bir parametredir (Not: fwhh: frequency width half height). Bu genişlik uygulanan periyodik dış kuvvete karşı osilasyonun tepkisinin keskinliğinin bir ölçüsüdür. Uygulanan kuvvetin frekansı () rezonans frekansına yakın olduğunda ≈ 0 alınabilir. Bu durumda 20 − 2 = ( ⏟ 𝑜 + ) ( ⏟ 𝑜 − ) ≅ 2𝑜 (−∆) 2𝑜 (4.62) −∆ yazabiliriz . Burada ∆ = − 𝑜 ’dir. Bu durumda ortalama güç ifadesi 20 𝐹0 2 𝛾 𝑃̅() = 2𝑚[420 (∆)2 +20 𝛾2 ] = 𝐹0 2 4(∆)2 +1] 2 2𝑚𝛾[ (4.63) olur. 𝑃̅()'nın maksimum değeri ∆ = 0 olduğunda (rezonans hali) gerçekleşir. 𝑃̅𝑚𝑎𝑥 = 𝐹0 2 2𝑚𝛾 = 𝐹0 2 2𝑏 (4.64) 𝑃̅(0 )'nın maksimum değerinin yarısına düştüğü 𝑃̅() değerine karşılık gelen 𝑜 ± frekansları, 1 𝐹0 2 2 2𝑚𝛾 = 𝐹0 2 2𝑚𝛾[(4∆2 )⁄𝛾2 +1] eşitliğinden elde edilir. Buradan 17 4∆2 ⁄𝛾 2 + 1 = 2 ⇒ 4∆2 ⁄𝛾 2 = 1 ⇒ 2∆ 𝛾 =1 veya 𝑓𝑤ℎℎ = 2∆ = 𝛾 = 0 (4.65) 𝑄 elde edilir ve bu değere rezonans genişliği adı verilir. Q kalite faktörü 𝑄= 0 𝛾 = 0 𝑓𝑤ℎℎ = rezonans frekansı (4.66) yarı yükseklikteki genişlik değerini ortalama güç ifadesinde kullanırsak 𝑃̅() için 𝑃̅() = 𝐹0 2 (4.67) 2 2𝑚0 𝑄[4(∆⁄0 ) +1⁄𝑄2 ] ifadesini elde ederiz. Bu bağıntı güç-rezonans eğrisinin Q'ya bağlı davranışıdır. 𝑃̅() ‘nin Q’ya bağlı davranışı Şekil-4.12’de verilmiştir. Şekil-4.12 Güç-rezonans eğrisinin Q kalite faktörüne bağlı davranışı. Bu şekilden de görüldüğü gibi Q büyüdükçe (b azaldıkça), güç-rezonans eğrisi daralmaktadır. Daha önceden tanımlanmış olan sönüm sabitine karşı gelen 𝜔0 𝑄 değeri dış sürücü kuvvetin yokluğunda sönümlü osilatörün enerjisinin azalması ile ilgilidir. Tam olarak tanımı ise, enerjinin ilk değerinin 1/e’sine düşmesi için geçen zamanın tersidir (=1/). 18 4.5 SALINIMA ZORLANMIŞ ELEKTRİK DEVRESİNDE REZONANS Daha önce kütle-yay sistemi ile seri bağlı RLC devresi arasındaki benzerlikler, zorlayıcı gerilim kullanmaksızın incelenmişti. Bu RLC devresine, bir AC elektromotor kuvvet (emk) kaynağı ekleyelim. Şekil-4.13’de seri bağlı bir RLC devresi gösterilmiştir. Şekil-4.13. Zorlamalı sönümlü salınım yapan elektrik devresi. Burada devreye Kirchhof’un ilmek kuralı uygulanarak 𝐿 veya 𝐿 𝑑𝑖 𝑑𝑡 𝑑2𝑞 𝑑𝑡 2 + 𝑞 𝐶 +𝑅 + 𝑖𝑅 = 𝑉0 𝑐𝑜𝑠𝑡 𝑑𝑞 𝑑𝑡 𝑞 + = 𝑉0 𝑐𝑜𝑠𝑡 𝐶 (4.68a) (4.68b) yazılabilir. Eşitliğin her iki tarafını L’ye bölerek 𝑑2𝑞 𝑑𝑡 2 + 𝑅 𝑑𝑞 𝐿 𝑑𝑡 + 𝑞 𝐿𝐶 = 𝑉0 𝐿 𝑐𝑜𝑠𝑡 (4.68c) yazılır. Burada 20 = 1 𝐿𝐶 ve 𝛾 = 𝑅 𝐿 (4.68d) alarak 𝑑2𝑞 𝑑𝑡 2 +𝛾 𝑑𝑞 𝑑𝑡 + 20 𝑞 = 𝑉0 𝐿 𝑐𝑜𝑠𝑡 (4.69) yazabiliriz. Kütle-yay sisteminde salınıma zorlanan sönümlü hareketin denklemini tekrar yazalım. 𝑑2𝑥 𝑑𝑥 𝑑𝑡 𝑑𝑡 +𝛾 2 + 20 𝑥 = 𝐹0 𝑚 𝑐𝑜𝑠𝑡 (4.70) Bu iki denklem (4.69 ve 4.70) matematiksel olarak aynı formdadır. Bu nedenle daha önceki çözümlerin benzerini burada da yazabiliriz. Bu durumda (4.69) denkleminin kalıcı çözümü için 𝑞 = 𝑞0 ()cos(𝑡 − ) (4.71) 19 yazabiliriz. Burada 𝑞0 () için 𝑞0 () = 𝑉0 /𝐿 1/2 2 [(20 −2 ) +(𝑅 ⁄𝐿 )2 ] (4.72a) 𝑞0 () = 𝑉0 2 [𝑅 +(1/𝐶 − 𝐿)2 ]1/2 (4.72b) veya elde ederiz. Devreden geçen i akımı için ise 𝑖= 𝑑𝑞 𝑑𝑡 = −𝑞0 () 𝑠𝑖𝑛(𝑡 − ) = − 𝑉0 1⁄ 2 2 1 2 [( −𝐿) +𝑅 ] 𝐶 sin(𝑡 − ) (4.73) yazılabilir. 1 𝐶 − 𝐿 = 0 veya = 0 = 1 √𝐿𝐶 koşulunda akım maksimum olur. Başka bir deyişle akımın maksimum değeri (genliği) için 𝐼0 ()𝑚𝑎𝑥 = 𝑉0 (4.74) 𝑅 yazabiliriz. Kapasitörün uçları arasındaki gerilim farkının (𝑉𝑐 ) 𝑞 𝑉𝐶 = = 𝑉𝐶 () cos(𝑡 − ) 𝑐 (4.75a) ifadesi ile verileceğini biliyoruz. Burada 𝑉𝐶 () = 𝑉0 /𝐿𝐶 2 [(20 −) +( 𝑅 2 1/2 ) ] 𝐿 (4.75b) dir. 0 = olduğunda 𝑉𝐶 ()’ni değeri maksimum olur 𝑉𝑐 (0 ) = Burada 𝑄 = 1 𝑅 0 𝐶 𝑉0 𝑅0 𝐶 = 𝑄𝑉0 (4.76) kalite faktörüdür (Elektrik yükü küçük q harfi ile gösterilmiştir). Bu sonuç RLC devresinin, rezonans durumunda, uygulanan AC voltaj değerini Q kalite faktörü kadar yükselttiğini söyler. 20 ÖRNEK-1 𝑑2𝑥 𝑑𝑡 2 +𝛾 𝑑𝑥 𝑑𝑡 + 𝜔02 𝑥 = 𝑓0 𝑐𝑜𝑠𝜔𝑡 (1) homojen olmayan çizgisel diferansiyel denklemini sağlayan bir özel çözüm bulunuz. Çözüm: 𝑥𝑝 = 𝐴𝑐𝑜𝑠𝜔𝑡 + 𝐵𝑠𝑖𝑛𝜔𝑡 Şeklinde bir çözüm seçelim. Bu fonksiyonun ikinci türevini hesaplayıp yukarıdaki (1) denkleminde yerine yazalım: 𝑑𝑥𝑝 = −𝐴𝜔𝑠𝑖𝑛𝜔𝑡 + 𝐵𝜔𝑐𝑜𝑠𝜔𝑡 𝑑𝑡 𝑑 2 𝑥𝑝 = −𝐴𝜔2 𝑐𝑜𝑠𝜔𝑡 − 𝐵𝜔2 𝑠𝑖𝑛𝜔𝑡 = −𝜔2 𝑥𝑝 𝑑𝑡 2 −𝜔2 𝑥𝑝 + 𝛾 𝛾 𝑑𝑥𝑝 𝑑𝑡 𝑑𝑥𝑝 + 𝜔02 𝑥𝑝 = 𝑓0 𝑐𝑜𝑠𝜔𝑡 𝑑𝑡 +(𝜔02 − 𝜔2 )𝑥𝑝 = 𝑓0 𝑐𝑜𝑠𝜔𝑡 veya 𝑑𝑥𝑝 (𝜔02 − 𝜔2 ) 𝑓0 + 𝑥𝑝 = 𝑐𝑜𝑠𝜔𝑡 𝑑𝑡 𝛾 𝛾 yazabiliriz. Burada 𝑃 = (𝜔02 −𝜔2 ) 𝛾 𝑑𝑥𝑝 𝑑𝑡 ve 𝑄 = 𝑓0 𝛾 𝑐𝑜𝑠𝜔𝑡 alarak + 𝑃𝑥𝑝 = 𝑄 (2) elde ederiz. Bu denklemin birinci dereceden çizgisel denklem olduğuna dikkat ediniz. Bu denklemi çözmenin bir yöntemi, öyle bir 𝜌 = 𝜌(𝑡) fonksiyonu bulmaktır ki, denklem 𝜌 ile çarpıldığında sol taraf 𝜌𝑡 çarpımının türevi biçimine dönüşsün. Yani (2) denklemini 𝜌 ile çarparak 𝜌 𝑑𝑥𝑝 𝑑𝑡 + 𝜌𝑃𝑥𝑝 = 𝜌𝑄 21 yazar ve 𝜌 üzerine 𝜌 𝑑𝑥𝑝 𝑑𝑡 + 𝜌𝑃𝑥𝑝 = 𝑑 𝑑𝑡 (𝜌𝑥𝑝 ) (3) koşulunu koymaya çalışırız. (3)’ün sağ tarafını açıp terimleri sadeleştirdiğimizde 𝜌 𝑑𝑥𝑝 𝑑𝑥𝑝 𝑑𝜌 + 𝜌𝑃𝑥𝑝 = 𝑥𝑝 + 𝜌 𝑑𝑡 𝑑𝑡 𝑑𝑡 Buradan 𝜌’nun sağlaması gerekli koşul olarak 𝑑𝜌 𝑥 = 𝜌𝑃𝑥𝑝 𝑑𝑡 𝑝 veya 𝑑𝜌 𝑑𝑡 = 𝜌𝑃 (4) elde ederiz. Bu denklem değişkenlerine ayrılabilen bir denklemdir. Buradan 𝑑𝜌 𝜌 = 𝑃𝑑𝑡 yazabiliriz. Bu denklemin çözümü için 𝐿𝑛𝜌 = ∫ 𝑃𝑑𝑡 + 𝐿𝑛𝐶 yazabiliriz. Buradan 𝜌 = 𝐶𝑒 ∫ 𝑃𝑑𝑡 yazılabileceği açıktır. Keyfi olarak C=1 seçebiliriz. Bu durumda 𝜌 = 𝑒 ∫ 𝑃𝑑𝑡 alınabilir. Bu fonksiyona (2) denkleminin integral çarpanı denir. Bu durumda 𝑑(𝜌𝑥𝑝 ) = 𝜌𝑄 𝑑𝑡 ve 𝜌𝑥𝑝 = ∫ 𝜌𝑄𝑑𝑡 + 𝐶 𝜌= 𝑒 ∫ 𝑃𝑑𝑡 =𝑒 (𝜔2 −𝜔2 ) 𝑑𝑡 ∫ 0𝛾 = (𝜔02 −𝜔2 ) 𝑡 𝑒 𝛾 Burada C=1 alınarak (𝜔02 −𝜔2 ) 𝑡 𝑒 𝛾 𝑥𝑝 yazılabilir. Ayrıca (𝜔02 −𝜔2 ) 𝛾 = (𝜔02 −𝜔2 ) 𝑓 𝑡 0 ∫𝑒 𝛾 𝑐𝑜𝑠𝜔𝑡𝑑𝑡 𝛾 = 𝑎 kısaltması yapılarak 𝑒 a𝑡 𝑥𝑝 = 𝑓0 ∫ 𝑒 a𝑡 𝑐𝑜𝑠𝜔𝑡𝑑𝑡 𝛾 yazılır. Burada 𝑢 = 𝑒 a𝑡 ve 𝑑𝑣 = 𝑐𝑜𝑠𝜔𝑡𝑑𝑡 alınır ve ∫ 𝑢𝑑𝑣 = 𝑢𝑣 − ∫ 𝑣𝑑𝑢 kısmi integrasyon yöntemi uygulanırsa 22 𝑒 a𝑡 𝑥𝑝 = 𝑓0 𝑓0 𝑎𝑐𝑜𝑠𝜔𝑡 + 𝜔𝑠𝑖𝑛𝜔𝑡 ∫ 𝑒 a𝑡 𝑐𝑜𝑠𝜔𝑡𝑑𝑡 = [𝑒 a𝑡 ] 𝛾 𝛾 𝑎2 + 𝜔 2 sonucu yazılabilir (Calculus and analytic geometry; George B. Thomas, Jr. Kitabına bakabilirsiniz). Bu ifadeden 𝑥𝑝 = elde edilir. Burada 𝑎 = 𝑥𝑝 = (𝜔02 −𝜔2 ) 𝛾 𝑓0 𝑎𝑐𝑜𝑠𝜔𝑡 + 𝜔𝑠𝑖𝑛𝜔𝑡 [ ] 𝛾 𝑎2 + 𝜔 2 değeri yerine yazılır ve gerekli ara işlemler yapılırsa 𝑓0 √(𝜔02 − 𝜔 2 )2 + + 𝜔2𝛾 2 [ 𝜔02 − 𝜔2 √(𝜔02 𝜔 2 )2 − 𝜔𝛾 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 + 𝜔2𝛾 2 𝑐𝑜𝑠𝜔𝑡 𝑠𝑖𝑛𝜔𝑡] elde edilir. Aşağıdaki dik üçgenden 𝑐𝑜𝑠𝜙 = 𝑠𝑖𝑛𝜙 = 𝜔02 − 𝜔2 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 𝜔𝛾 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 yazılabilir. Bu değerler kullanılarak yukarıdaki ifade 𝑥𝑝 = 𝑓0 √(𝜔02 − 𝜔 2 )2 veya 𝑥𝑝 = + 𝜔2𝛾 2 [𝑐𝑜𝑠𝜙𝑐𝑜𝑠𝜔𝑡 + 𝑠𝑖𝑛𝜙𝑠𝑖𝑛𝜔𝑡] 𝑓0 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 [cos(𝜔𝑡 − 𝜙)] sonucu elde edilir. Bu sonuç (1) denklemi için bir özel çözümdür. Konu anlatımında bu sonucu kullandığımızı hatırlayınız. 23 ÖRNEK-2 Periyodik dış kuvvet 𝐹0 𝑠𝑖𝑛𝜔𝑡 şeklinde olursa, zoruna salınımlı osilatörün kararlı hal çözümünün (Kalıcı çözüm, 𝑥𝑝 özel çözümü) nasıl olacağını bulunuz. (French-p4.2) Çözüm: Örnek-1’de zorlamalı dış kuvvet 𝐹0 𝑐𝑜𝑠𝜔𝑡 şeklinde olduğunda 𝑥𝑝 özel çözümünü elde etmiştik. Dış kuvvet 𝐹0 𝑠𝑖𝑛𝜔𝑡 şeklinde olursa daha önceki problemde karşımıza çıkan ∫ 𝑒 a𝑡 𝑐𝑜𝑠𝜔𝑡𝑑𝑡 integrali yerine ∫ 𝑒 a𝑡 𝑠𝑖𝑛𝜔𝑡𝑑𝑡 integrali gelecektir. Bu integralin çözümü de benzer şekilde yapılırsa ∫ 𝑒 𝑎𝑡 𝑠𝑖𝑛𝜔𝑡𝑑𝑡 = 1 𝑒 𝑎𝑥 [𝑎𝑠𝑖𝑛𝜔𝑡 − 𝜔𝑐𝑜𝑠𝜔𝑡] 𝑎2 + 𝜔 2 olduğunu göstermek zor değildir. Bu sonucu örnek-1’deki yerine yazarsanız 𝑥𝑝 özel çözümü için 𝑥𝑝 = 𝑓0 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 [sin(𝜔𝑡 − 𝜙)] sonucunu elde edersiniz. ÖRNEK-3 Kütlesi 0,2 kg olan bir cisim kuvvet sabiti k=80 N/m olan bir yaya asılıdır. Cisim –bv şeklinde bir sönüm kuvvetine maruz kalmaktadır. Burada v hız (m/s cinsinden) ve b=4 Nm-1s sönüm sabitidir. a) Sistemin serbest salınımlarının diferansiyel denklemini yazınız. Salınımların periyodunu bulunuz. b) Sistem, 𝐹(𝑡) = 𝐹0 𝑠𝑖𝑛𝜔𝑡 , 𝐹0 = 2 𝑁 ,ve 𝜔 = 30 𝑠 −1 olan sinüzoidal bir dış kuvvete maruz kaldığı zaman kararlı halde zoruna salınımın genliği nedir? (French-p4.3) 24 Çözüm: a) Sönümlü harmonik hareketin diferansiyel denkleminin 𝑑2 𝑥 𝑏 𝑑𝑥 𝑘 + + 𝑥=0 𝑑𝑡 2 𝑚 𝑑𝑡 𝑚 olduğunu biliyorsunuz (Ders notlarına bakınız). 𝑚 = 0,2 𝑘𝑔, 𝑘 = 80 𝑁/𝑚, 𝑏 = 4 𝑁𝑚−1 𝑠 değerlerini kullanarak hareket denklemi için 𝑑2 𝑥 𝑑𝑥 + 20 + 400𝑥 = 0 2 𝑑𝑡 𝑑𝑡 yazabiliriz. 𝜔 = √𝜔02 − (𝛾/2)2 = √𝑘/𝑚 − 𝑏2 4𝑚2 ⇒𝑇= 2𝜋 2 √𝑘/𝑚− 𝑏 2 4𝑚 = 2𝜋 √400−100 = 2𝜋 √300 = 𝜋 5√3 𝑠 b) Zorlamalı sönümlü hareketin karalı durumunun genliği için 𝐴= 𝐹0 /𝑚 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 2/0,2 𝐴= √(400 − 900)2 + ( 4 2 ) 900 0,2 = = 𝐹0 /𝑚 2 √(k/m − 𝜔 2 )2 + 𝑏 2 𝜔 2 𝑚 10 √(−500)2 + (20)2 900 = 10 √61𝑥104 ≅ 0,013 𝑚 = 1,3 𝑐𝑚 𝐴 ≅ 1,3 𝑐𝑚 yazabiliriz. ÖRNEK-4 Yatay bir zemin üzerinde yer alan m kütleli bir blok, bir ucu duvara tutturulmuş yatay duran bir yayın ucuna bağlanmıştır. Sistem aynı zamanda bir viskoz mekanizması altındadır. Bu sistem için aşağıdaki gözlemler tespit edilmiştir. 1) Eğer blok yatay ve mg’ye eşit bir kuvvetle itilirse yayın statik sıkışması h’ye eşit olmaktadır. 2) Eğer blok belli bir u hızı ile hareket ederse viskoz sürtünme kuvveti mg olmaktadır. 25 a) Komple sistemde (yay ve viskoz sönüm mekanizması ) kütlenin yatay titreşimlerinin diferansiyel denklemini, m, g, h ve u cinsinden yazınız. 𝑢 = 3√𝑔ℎ durumu için aşağıdaki soruları yanıtlayınız. b) Sönümlü titreşimlerin açısal frekansı nedir? c) Enerjinin1/e değerine düşmesi için geçen zamanı √ℎ/𝑔 ifadesine bağlı olarak bulunuz. d) Bu osilatörün Q değeri nedir? e) Osilatör t=0’da durgun iken +x yönünde hareket eden kütlesi ihmal edilebilen ancak momentumu ihmal edilemeyen bir mermi tarafından harekete geçiriliyor. Kararlı haldeen sonra herhangi bir t anındaki yer değiştirmeyi veren 𝑥 = 𝐴𝑒 𝛾𝑡 2 − cos(𝜔𝑡 − 𝛿) ifadesinde verilen 𝛿 faz sabitinin değerini bulunuz. f) Eğer sistem 𝑚𝑔𝑐𝑜𝑠𝜔𝑡 ile verilen bir dış kuvvetle sürülürse ( Burada 𝜔 = √2𝑔/ℎ dir) sistemin kararlı halinin genliği nedir? (French-p4.4) Çözüm: Sözü edilen sistemi aşağıdaki şekilde temsil edebiliriz. a) 1. Gözlemden 𝑚𝑔 = 𝑘ℎ ⇒ 𝑘 𝑚 = 2. gözlemden −𝑏𝑢 = −𝑚𝑔 ⇒ 𝑔 ℎ 𝑏 𝑚 elde edilir. = 𝑔 𝑢 elde edilir. Sönümlü harmonik hareketin diferansiyel denkleminin 𝑑 2 𝑥 𝑏 𝑑𝑥 𝑘 + + 𝑥=0 𝑑𝑡 2 𝑚 𝑑𝑡 𝑚 olduğunu biliyorsunuz. 1. Ve 2. Gözlemlerden elde edilen sonuçları kullanarak hareketin diferansiyel denklemi için 𝑑 2 𝑥 𝑔 𝑑𝑥 𝑔 + + 𝑥=0 𝑑𝑡 2 𝑢 𝑑𝑡 ℎ ifadesini yazabiliriz. 26 b) Sönümlü hareketin frekansını 𝜔𝑠 ile gösterirsek 𝜔𝑠 = √𝜔02 − 𝑏2 𝑔 𝑔2 √ − = 4𝑚2 ℎ 4𝑢2 𝑢 = 3√𝑔ℎ olarak veriliyor, bunu yerine yazarak 𝑔 𝑔2 𝑔 𝑔2 𝑔 𝑔 35 𝑔 𝜔𝑠 = √ − 2 = 𝜔𝑠 = √ − =√ − =√ ℎ 4𝑢 ℎ 36𝑔ℎ ℎ 36ℎ 36 ℎ elde edilir. c) Enerjinin zamanla değişiminin 𝐸 = 𝐸0 𝑒 −𝛾𝑡 ifadesi ile verildiğini biliyorsunuz. Buradan enerjinin 1/e’sine düşmesi için geçen zaman 𝐸0 𝑒 1 1 𝛾 𝑏/𝑚 = 𝐸0 𝑒 −𝛾𝑡 ⇒ 𝑡 = = = 1 𝑔/𝑢 = 𝑢 𝑔 3√𝑔ℎ = 𝑔 = 3√ ℎ 𝑔 elde edilir. 𝜔 d) Sistemin Q kalite faktörünün 𝑄 = 0 ile verildiğini biliyorsunuz. 𝛾 𝜔0 = √𝑘/𝑚 = √𝑔/ℎ ve 𝛾 = 𝑏 𝑚 = 𝑔 1 𝑔 = √ değerlerini kullanarak 𝑢 3 ℎ 𝑔 √ 𝜔0 ℎ 𝑄= = =3 𝛾 1 𝑔 √ 3 ℎ bulunur. e) Zorlamalı sönümlü hareketin kararlı hal çözümü 𝑥 = 𝐴(𝜔) cos(𝜔𝑡 − 𝛿) ifadesi ile veriliyor. 𝑡 = 0 anında 𝑥 = 0 olduğu veriliyor. Bu durumda 0 = 𝐴𝐶𝑜𝑠(0 − 𝛿) ⇒ 𝑐𝑜𝑠𝛿 = 0 ⇒ 𝛿 = 𝜋/2 bulunur. f) Zorlamalı sönümlü hareketin kararlı hal çözümünün genliğinin 𝐴= 𝐹0 /𝑚 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 ifadesi ile verildiğini biliyorsunuz. Burada 𝐹0 sürücü kuvvetin genliğidir. Sürücü kuvvet olarak 𝐹 = 𝑚𝑔𝑐𝑜𝑠𝜔𝑡 verildiğine göre 𝐹0 = 𝑚𝑔 yazabiliriz. Burada daha önce elde ettiğimiz 𝐹0 = 𝑚𝑔, 𝜔2 = 2𝑔 ℎ ,𝜔02 = 𝑔 ℎ , 𝛾2 = 1𝑔 9ℎ değerlerini kullanarak A genliği için 27 𝐴= 𝐹0 /𝑚 √(𝜔02 − 𝜔 2 )2 + 𝜔 2 𝛾 2 = 3ℎ √11 = mg/𝑚 g = √(𝑔 − 2𝑔)2 + 2𝑔 1 𝑔 ℎ ℎ ℎ 9ℎ 2 2 √𝑔2 + 2 𝑔2 9ℎ ℎ = g 2 √11 𝑔2 9 ℎ = g 1𝑔 3 ℎ √11 ≅ 0,90ℎ 𝐴 ≅ 0,90ℎ elde edilir. ÖRNEK-5 𝑚 = 0,2 𝑘𝑔, 𝑏 = 4 𝑁𝑚−1 𝑠 ve 𝑘 = 80 𝑁/𝑚 değerlerine sahip bir sönümlü osilatör göz önüne alınız. Bu osilatörün 𝐹(𝑡) = 𝐹0 𝑐𝑜𝑠𝜔𝑡 (𝐹0 = 2 𝑁, 𝜔 = 30 𝑠 −1 ) şeklinde bir dış sürücü kuvvetin etkisinde olduğunu farz ediniz. a) 𝑥 = 𝐴𝑐𝑜𝑠(𝜔𝑡 − 𝛿) ile tanımlanan kararlı halin 𝛿 ve A değerlerini bulunuz. b) Bir salınımda sönüm kuvvetine karşı ne kadarlık enerji harcanır? c) Ortalama güç girdisi nedir? (French-p4.11) Çözüm: Zorlamalı sönümlü harmonik hareketin kararlı durum genliği 𝐴= 𝑓0 1⁄ 2 [(20 − 2 )2 + 𝛾 2 2 ] ifadesi ile ve faz sabiti ise 𝑡𝑎𝑛 = 20 𝛾 − 2 ile verildiğini biliyorsunuz (Ders notlarına bakınız). 𝑓0 = 𝐹0 𝑚 = 2 0,2 = 10, 𝜔02 = 𝑘 𝑚 = 80 0,2 = 400 𝑠 −2 , 𝜔2 = 900 𝑠 −2 , 𝛾 = 𝑏 𝑚 = 4 0,2 = 20 𝑠 −1 Bu değerler kullanılarak 𝐴= 𝑓0 1⁄ 𝛾 2 2] 2 10 = [400 − 900)2 + [(20 − 2 )2 + ≅ 1,3𝑥10−2 𝑚 = 1,3 𝑐𝑚 𝑡𝑎𝑛 = 𝛾 20 −2 = 20𝑥30 400−900 1 400x900] ⁄2 = 10 [25x104 + 1 36x104 ] ⁄2 = 1 10√61 6 = − = −0,12 ⇒ = 130° 5 b) Mekanikte güç için 𝑃 = 𝐹. 𝑣 ifadesini yazacağımızı biliyoruz. Sönüm kuvvetine (F=bv) karşı harcanan güç için 𝑃 = 𝐹. 𝑣 = (𝑏𝑣). 𝑣 = 𝑏𝑣 2 veya 28 𝑃= 𝑑𝑊 = 𝑏𝑣 2 𝑑𝑡 yazabiliriz. Buradan 𝑑𝑊 = 𝑏𝑣 2 𝑑𝑡 yazılır. 𝑥 = 𝐴𝑐𝑜𝑠(𝜔𝑡 − 𝛿) ⇒ 𝑣 = 𝑑𝑥 𝑑𝑡 = −𝐴𝜔sin(𝜔𝑡 − 𝛿) olduğundan 𝑑𝑊 = 𝑏𝑣 2 𝑑𝑡 = 𝑏𝐴2 𝜔2 𝑠𝑖𝑛2 (𝜔𝑡 − 𝛿)𝑑𝑡 Bir periyotluk sürede (T) harcanan enerji için 𝑇 2 2 𝑊 = ∫ 𝑏𝐴 𝜔 𝑠𝑖𝑛 0 2 (𝜔𝑡 𝑇 1 − 𝛿)𝑑𝑡 = 𝑏𝐴 𝜔 ∫ 𝑠𝑖𝑛2 (𝜔𝑡 − 𝛿)𝑑𝑡 = 𝑏𝐴2 𝜔2 𝑇 2 0 2 2 1 1 2𝜋 = 𝑏𝐴2 𝜔𝜔𝑇 = 𝑏𝐴2 𝜔 𝑇 = 𝑏𝐴2 𝜔𝜋 2 2 𝑇 𝑊 = 𝑏𝐴2 𝜔𝜋 = 4𝑥(1,3𝑥10−2 )2 𝑥30𝑥3,13 ≅ 0,064 𝑗𝑜𝑢𝑙𝑒 c) Ortalama güç girdisi için 1 𝑇 𝐹0 𝑇 𝑃 = ∫ (𝐹0 𝑐𝑜𝑠𝜔𝑡)𝑣𝑑𝑡 = ∫ −(𝑐𝑜𝑠𝜔𝑡)𝐴𝜔sin(𝜔𝑡 − 𝛿)𝑑𝑡 𝑇 0 𝑇 0 𝐹0 𝐴𝜔 𝑇 =− ∫ 𝑐𝑜𝑠𝜔tsin(𝜔𝑡 − 𝛿)𝑑𝑡 𝑇 0 𝐹0 𝐴𝜔 𝑇 =− ∫ 𝑐𝑜𝑠𝜔𝑡[𝑠𝑖𝑛𝜔𝑡𝑐𝑜𝑠𝛿 − 𝑐𝑜𝑠𝜔𝑡𝑠𝑖𝑛𝛿])𝑑𝑡 𝑇 0 𝐹0 𝐴𝜔 𝑇 =− ∫ [𝑐𝑜𝑠𝜔𝑡𝑠𝑖𝑛𝜔𝑡𝑐𝑜𝑠𝛿 − 𝑐𝑜𝑠𝜔𝑡𝑐𝑜𝑠𝜔𝑡𝑠𝑖𝑛𝛿])𝑑𝑡 𝑇 0 𝐹0 𝐴𝜔 𝑇 1 =− ∫ [ 𝑠𝑖𝑛2𝜔𝑡𝑐𝑜𝑠𝛿 − 𝑐𝑜𝑠 2 𝜔𝑡𝑠𝑖𝑛𝛿] 𝑑𝑡 𝑇 0 2 𝐹0 𝐴𝜔 𝑇 1 1 =− ∫ [ 𝑠𝑖𝑛2𝜔𝑡𝑐𝑜𝑠𝛿 − (1 + 𝑐𝑜𝑠2𝜔𝑡)𝑠𝑖𝑛𝛿] 𝑑𝑡 𝑇 0 2 2 𝑇 𝑇 𝐹0 𝐴𝜔 1 1 =− [ 𝑐𝑜𝑠𝛿 ∫ 𝑠𝑖𝑛2𝜔𝑡𝑑𝑡 − 𝑠𝑖𝑛𝛿 ∫ (1 + 𝑐𝑜𝑠2𝜔𝑡)𝑑𝑡] 𝑇 2 2 0 0 𝑇 𝑇 𝐹0 𝐴𝜔 1 1 =− [ 𝑐𝑜𝑠𝛿 ∫ 𝑠𝑖𝑛2𝜔𝑡𝑑𝑡 − 𝑠𝑖𝑛𝛿 ∫ 𝑑𝑡 𝑇 2 2 0 0 𝑇 1 − 𝑠𝑖𝑛𝛿 ∫ 𝑐𝑜𝑠2𝜔𝑡𝑑𝑡] 2 0 29 𝑇 𝑇 ∫0 𝑠𝑖𝑛2𝜔𝑡𝑑𝑡 = 0 ve ∫0 𝑐𝑜𝑠2𝜔𝑡𝑑𝑡 = 0 olduğundan 1 𝑃𝑜𝑟𝑡 = 𝜔𝐴𝐹0 𝑠𝑖𝑛𝛿 2 ifadesini yazabiliriz. Verilen ve bulunan değerler burada kullanılırsa 1 𝑃̅ = 30𝑥1,3𝑥10−2 𝑥2𝑠𝑖𝑛130° ≅ 0,30 𝑤𝑎𝑡𝑡 2 bulunur. ÖRNEK-6 Aşağıdaki grafik, 𝐹(𝑡) = 𝐹0 𝑐𝑜𝑠𝜔𝑡 kuvveti ile sürülen bir mekaniksel sistemin güçrezonans eğrisini göstermektedir. 𝐹0 sabit, 𝜔 ise değişkendir. a) Bu sistemin Q ve 𝜔0 değerlerini bulunuz. b) Dış kuvvetin etkisi yok edilirse, kaç salınım sonunda sistemin enerjisi ilk değerinin periyodu 1 𝑒5 2𝜋 𝜔0 ’ine düşer ( 𝑒 ≅ 2,718 ve iyi bir yaklaşımla serbest salınımların olarak alınabilir). (French-p4.13) Çözüm: a) 𝜔0 = 40 𝑠 −1 , 𝛾 = 41 − 39 = 2 𝑠 −1 ⇒ 𝑄 = 𝜔0 𝛾 = 40 2 = 20 b) Sönümlü hareketin genliği için 𝐴= 𝛾 − 𝑡 𝐴0 𝑒 2 ifadesini yazabiliriz. Sistemin mekanik enerjisi için ise 1 𝐸 = 𝑘𝐴2 2 yazıldığını biliyoruz. Buradan 1 1 𝐸 = 𝑘𝐴2 = 𝑘𝐴20 𝑒 −𝛾𝑡 = 𝐸0 𝑒 −𝛾𝑡 2 2 30 yazılır. 𝐸0 𝑒5 5 5 𝛾 2 = 𝐸0 𝑒 −𝛾𝑡 ⇒ 𝑒 5 = 𝑒 𝛾𝑡 ⇒ 𝛾𝑡 = 5 ⇒ 𝑡 = = = 2,5 𝑠 𝑇= 2𝜋 2𝜋 = 𝜔0 40 yukarıda bulunan t süresi içindeki periyot sayısı (n) için 𝑡 2,5 100 𝑛 = = 2𝜋 = ≅ 16 𝑇 2𝜋 40 bulunur yani sistem 2,5 s süresince yaklaşık 16 salınım yapar. ÖRNEK-7 Yatay düzlemde kütlesi 0,15 kg olan bir blok, kuvvet sabiti k=0,90 N/m olan bir yayın ucuna bağlıdır. Sisteme sürtünmeler nedeniyle hız ile orantılı bir sönüm kuvveti etkimektedir. Sönüm sabiti b=0,20 kg/s dir. Bu sisteme 𝐹(𝑡) = 𝐹0 𝑐𝑜𝑠𝜔𝑡 ile verilen bir harmonik dış kuvvet etki ettiriliyor. Burada 𝐹0 = 3,0 𝑁 dır. a) Rezonans frekansını (𝜔𝑅 ) hesaplayınız. b) Rezonans durumunda kararlı durumun genliğini hesaplayınız. c) Rezonans durumunda sürücü dış kuvvetin sisteme uyguladığı ortlama gücü hesaplayınız. d) Hızın rezonansta olduğu frekansta, dış kuvvetin sisteme uyguladığı gücü hesaplayınız. e) c ve d şıklarında bulduğunuz değerleri karşılaştırın. Çözüm: Genlik rezonans frekensının 𝜔𝑅 = √𝜔02 − 𝛾2 2 ifadesi ile verildiğini biliyoruz (Ders notlarına bakınız). Verilen 𝑚 = 0,15 𝑘𝑔 , 𝑘 = 0,90 𝑁/𝑚 değerleri kullanılarak 𝜔02 = 𝛾= 𝑏 𝑚 = 0,20 0,15 = 4 3 𝑘 𝑚 = 0,90 0,15 = 6 𝑠 −2 ve 𝑠 −1 elde edilir. Bu sonuçlar kullanılarak 𝜔𝑅 frekansı için 31 𝜔𝑅 = √𝜔02 − 𝛾2 16 8 √46 = √6 − = √6 − = ≅ 2,26 𝑠 −1 2 18 9 3 bulunur. b) Rezonans durumda genlik için 𝐴= 𝐹0 𝑚 [(20 − 1⁄ 𝜔𝑅2 )2 + 𝛾 2 𝜔𝑅2 ] 2 = 3,0 0,15 4 [(6 − (2,26)2 )2 + (3)2 (2,26)2 ] 1⁄ 2 20 = 6,33 𝑚 3,16 = bulunur. c) Sürücü kuvvet tarafından sisteme aktarılan ortalama gücün (𝑃𝑜𝑟𝑡 )𝑥 = 2 𝐹0 2 𝛾 2 2𝑚[(20 − 2 ) + 2 2 ] ifadesi ile verildiğini biliyoruz. Bu ifade yeniden düzenlenerek (𝑃𝑜𝑟𝑡 )𝑥 = 1 2 𝛾𝑚 [ 2 2 𝐹0 /𝑚 2 [(20 − 2 ) 1/2 + 2 2 ] ] veya (𝑃𝑜𝑟𝑡 )𝑥 = 1 2 b2 [ 2 [(20 − 2 ) veya (𝑃𝑜𝑟𝑡 )𝑥 yazılabilir. Buradan (𝑃𝑜𝑟𝑡 )𝑥 = 1 2 b2 𝐴2 = 1 2 2 𝐹0 /𝑚 = 1 2 + 2 2 ] 1/2 ] b2 𝐴2 𝑥0,20𝑥(2,26)2 𝑥(6.33)2 = 20,5 𝑤𝑎𝑡𝑡 bulunur. d) Kararlı durumda uzanımın 𝑥(𝑡) = 𝐴𝑐𝑜𝑠(𝑡 − ) ifadesi ile verildiğini biliyoruz. Buradan hız için 𝑣= 𝑑𝑥 = −𝐴𝜔𝑠𝑖𝑛(𝑡 − ) 𝑑𝑡 yazabiliriz. Hızın genliği (𝑣0 ) için ise 𝑣0 = 𝐴𝜔 = 𝑓0 𝜔 2 [(20 − 2 ) + 𝛾2 2 ] 1⁄ 2 ifadesinin yazılacağı açıktır. Hızın rezonansta olduğu frekans değerini hesaplamak gerekecek. Yani hızın genliğini maksimum yapacak frekans değerini bulacağız. 32 2 2 2 2 2 𝑑𝑣0 𝑓0 [(0 − ) + 𝛾 ] = 𝑑𝜔 1⁄ 2 −1⁄ 1 − 2 𝑓0 𝜔[(20 − 2 )2 + 𝛾 2 2 ] 2 [2𝛾 2 𝜔 − 4𝜔(20 − 2 )] (20 − 2 )2 + 𝛾 2 2 =0 Buradan 1 −1⁄ − 𝑓0 𝜔[(20 − 2 )2 + 𝛾 2 2 ] 2 [2𝛾 2 𝜔 − 4𝜔(20 − 2 )] = 0 2 1 [(20 − 2 )2 + 𝛾 2 2 ] − 2 [2𝛾 2 − 4(20 − 2 )] = 0 2 𝑓0 [(20 − 2 )2 + 𝛾 2 2 ] 1⁄ 2 (20 − 2 )2 + 𝛾 2 2 − 𝛾 2 2 + 2 2 (20 − 2 ) = 0 (20 − 2 )2 +2(20 − 2 ) = 0 (20 − 2 )(20 − 2 + 2 2 ) = 0 (20 − 2 )(20 + 2 ) = 0 Buradan 𝜔 = 𝜔0 olması gerektiği anlaşılır. Başka bir deyişle hızın rezonansta olduğu frekans 𝜔𝑣𝑅 = 𝜔0 dır. Bu frekansta aktarılan güç 1 (𝑃𝑜𝑟𝑡 )𝑣 = 𝑏𝜔02 𝐴2𝑣 2 Burada 𝐴𝑣 için A’nın 𝜔 = 𝜔0 ’daki değerin alınacağına dikkat edelim. 𝐴𝑣 = 𝑓0 2 [(20 − (20 )) + 1⁄ 2 2 2 𝛾 0 ] = 𝑓0 𝛾𝜔0 = 𝑓0 𝛾 = 𝐹0 𝑏𝜔0 1 2 2 1 2 𝐹02 1 𝐹02 1 9 (𝑃𝑜𝑟𝑡 )𝑣 = 𝑏𝜔0 𝐴𝑣 = 𝑏𝜔0 2 2 = = 𝑥 = 22,5 𝑤𝑎𝑡𝑡 2 2 2 0,2 𝑏 𝜔0 2 𝑏 e) Burada (𝑃𝑜𝑟𝑡 )𝑣 > (𝑃𝑜𝑟𝑡 )𝑥 olduğuna dikkat ediniz. Bu sonuç sadece bu özel problem için geçerli değildir. Yani güç aktarımı, hızın rezonansta olduğu frekansta , maksimum olur. 33 ÖRNEK-8 Kütlesi 𝑚 = 0,1 𝑘𝑔 olan bir blok kuvvet sabiti 𝑘 = 40 𝑁/𝑚 olan yayın ucuna bağlıdır. Bu sistem sönüm sabiti 𝑏 = 0,1 𝑘𝑔/𝑠 olan bir kuvvetin etkisindedir. a) Bu kütleyi 𝑥 = 0 denge konumundan 𝑥 = 15 𝑐𝑚 noktasına getirecek sabit 𝐹1 kuvvetinin değerini bulunuz. b) Sisteme genliği 𝐹2 ve frekansı 𝜔 olan 𝐹(𝑡) = 𝐹2 𝑐𝑜𝑠𝜔𝑡 sürücü dış kuvveti uygulanıyor. Hız rezonansı durumunda kararlı durum hareketinin genliğinin 𝐴 = 15 𝑐𝑚 olması için sürücü kuvvetin genliği olan 𝐹2 ’nin değeri ne olmalıdır? Çözüm: 𝑁 𝑘𝑔 𝑚 𝑠 Veriler 𝑚 = 0,1 𝑘𝑔, 𝑘 = 40 , 𝑏 = 0,1 𝜔02 = 𝑘 𝑚 = 40 0,1 = 400 𝑠 −2 ⇒ 𝜔0 = 20 𝑠 −1 , 𝛾 = 𝑏 𝑚 = 0,1 0,1 = 1 𝑠 −1 a) 𝐹1 = 𝑘𝑥 = 40𝑥0,15 = 6 𝑁 b) Kararlı durum çözümünün 𝑥𝑝 = 𝐴𝑐𝑜𝑠(𝜔𝑡 − 𝜙) bağıntısı ile verildiğini biliyorsunuz. Burada A için 𝐴= 𝐹0 𝑚 [(20 − 𝜔 2 )2 + 𝛾 2 𝜔 2 ] 1⁄ 2 yazabiliriz. Sürücü kuvvet 𝐹(𝑡) = 𝐹2 𝑐𝑜𝑠𝜔𝑡 şeklinde verildiği için 𝐹0 = 𝐹2 olur. Hız rezonansı durumunda 𝜔 = 𝜔0 olduğunu biliyoruz (Örnek-7’ye bakınız). Bu durumda 𝐴= 𝐹0 𝑚 1⁄ [(20 −𝜔2 )2 +𝛾2 𝜔2 ] 2 = 𝐹2 𝑚 𝑏 ω 𝑚 = 𝐹2 𝑏𝜔 ⇒ 𝐹2 = 𝐴𝑏𝜔0 = 0,15𝑥0,1𝑥20 = 0,30 𝑁 Statik 𝐹1 = 6 𝑁’luk kuvvet yayı 15 cm geriyor. Buna karşı sisteme 𝐹(𝑡) = 0,30𝑐𝑜𝑠𝜔𝑡 şeklinde harmonik bir kuvvet uygulandığında, kuvvetin frekansı 𝜔 = 𝜔0 olduğunda, yay 15 cm gerilebiliyor. Ancak harmonik dış kuvvetin genliğinin 0,30 N olduğuna dikkat ediniz. Kuvvetler oranı için 𝐹2 𝐹1 = 0,30 6 = 1 20 yazabiliriz . Başka bir deyişle, hız rezonansı durumunda, genliği küçük harmonik bir kuvvetle yayı uzatmak daha kolay olmaktadır. 34
© Copyright 2026 Paperzz