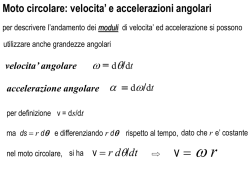
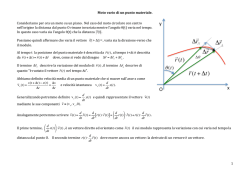
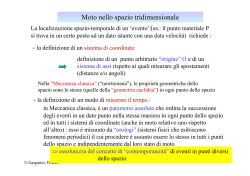
FISICA – LEZIONE 3 S.D.S. ARCHITETTURA Prof. Ing. Francesco Noto I vettori Grandezze scalari: vengono definite dal loro valore numerico esempi: lunghezza di un segmento, area di una figura piana, temperatura di un corpo, ecc. Grandezze vettoriali vengono definite, oltre che dal loro valore numerico, da una direzione e da un verso esempi: velocità di un corpo, forza agente su un corpo, ecc. Vettori nel piano Spostamento, velocità e accelerazione sono grandezze vettoriali Ogni vettore su di un piano può essere espresso come somma di due vettori Per lo spazio: ogni vettore può essere espresso come somma di tre vettori Tra i vettori ce ne sono di particolari, detti versori o vettori unitari, in quanto hanno intensità unitaria e dimensioni fisiche nulle 3 Vettori nel piano modulo di v = lunghezza y B’’ v A B del segmento AB vè la direzione di definita dall’angolo φ φ A’’ O A’ v (v x , v y ) v v x2 v 2y arctan vy vx B’ x componente vx = lunghezza orientata del segmento A’B’ componente vy = lunghezza orientata del segmento A’’B’’ Vettore posizione Il vettore posizione si può quindi scrivere coord. cartesiane r t xtux ytuy In coord. polari r t t u 0u In Ove le funzioni che moltiplicano i versori sono le proiezioni del vettore lungo le direzioni dei versori stessi Similmente in tre dimensioni r t x t ux y t uy zt uz In coord. cartesiane In coord. sferiche r t r t ur 0u 0u 5 Vettore posizione Una importante differenza tra sistema cartesiano e polare è che nel primo l’orientazione dei versori è indipendente dal particolare vettore posizione e quindi dal tempo, mentre nel secondo in generale dipende da questi 6 Vettore spostamento È la differenza di due vettori posizione, ad esempio r t t e r t r t r t t r t r t r t r t r t r t t r t t 7 Vettore spostamento In coordinate cartesiane lo spostamento si può esprimere r t x t t x t ux y t t y t uy Ove non c’è ambiguità sui versori da usare, in quanto sono gli stessi per i due vettori posizione r t r t r t t 8 Vettore spostamento In coordinate polari lo spostamento si può esprimere con i versori relativi a r t Ciò in pratica equivale a proiettare r t t lungo r t t t t u rf t t rf t uf r t e lungo la direzione perpendicolare, f r t r t r t t 9 Versori versore = vettore di lunghezza unitaria y î (1,0) = versore dell’asse x ĵ(0,1) = versore dell’asse y ĵ î 0 x Prodotto di un vettore per uno scalare Dati uno scalare c ed un vettore v, si definisce il prodotto u=cv. Il vettore u è parallelo a v. Il modulo di u è dato da: u c v Il verso di u è lo stesso di v se c>0, è opposto a quello di v se c<0 Somma di due vettori y Il vettore somma c=a+b è la diagonale del parallelogramma avente per lati i vettori a e b by a cy ay c θ b ax 0 c x a x bx c y a y by bx cx c x 2 2 a b 2 a b cosθ Differenza di due vettori La differenza a - b si calcola sommando al vettore a il vettore -b, opposto del vettore b y c=a-b a -b b 0 x Somma di N vettori Dati i vettori a1, a2, ... , aN il vettore somma b = a1+a2+ ... +aN si calcola nel modo seguente: •si costruisce la spezzata formata dai vettori a1, a2, ..., aN •si congiungono i due estremi liberi di tale spezzata y a2 a1 a3 a4 b 0 x bx a1x a 2x ... a Nx b y a1y a 2y ... a Ny Vettori nello spazio z v v x iˆ v y ˆj v z kˆ ^ vz k v 2 2 2 v v x v y vz θ vy ĵ vx î x φ y La direzione di v risulta definita dagli angoli θ e φ vz θ arccos v arctan vy vx Prodotto scalare Dati due vettori a e b, il prodotto scalare tra a e b è una grandezza scalare definita nel modo seguente: a b a b cosα b Il prodotto scalare tra a e b è un numero che è pari al prodotto del modulo di a per la componente di b lungo la direzione di a α a bcosα Ovviamente il prodotto scalare a · b è anche pari al prodotto del modulo di b per la componente di a lungo la direzione di b Prodotto scalare in componenti cartesiane Tenendo conto del fatto che i versori degli assi cartesiani sono a due a due perpendicolari fra loro, si ha che: iˆ iˆ 1 ˆj iˆ 0 kˆ iˆ 0 iˆ ˆj 0 ˆj ˆj 1 kˆ ˆj 0 iˆ kˆ 0 ˆj kˆ 0 kˆ kˆ 1 Di conseguenza, esprimendo i vettori in termini delle loro componenti cartesiane, si ha: a a x iˆ a y ˆj a z kˆ b bx iˆ b y ˆj bz kˆ Caso particolare: b = a a b a x bx a y by a z bz 2 2 2 2 a a a x a y az a Prodotto vettoriale Dati due vettori a e b, il prodotto vettoriale c = a × b è un vettore che gode delle proprietà seguenti: • il modulo di c è dato da absinθ, dove θ è l’angolo minore di 180° compreso tra a e b • la direzione di c è perpendicolare al piano individuato da a e b • il verso di c è calcolato applicando la regola della mano destra c b θ a La regola della mano destra Prima formulazione Si dispone il pollice lungo il primo vettore a×b Si dispone l’indice lungo il secondo vettore Il verso del medio individua il verso del prodotto vettoriale Seconda formulazione Si chiude a pugno la mano destra mantenendo sollevato il pollice Le dita chiuse a pugno devono indicare il verso in cui il primo vettore deve ruotare per sovrapporsi al secondo in modo che l’angolo θ di rotazione sia minore di 180° Il verso del pollice individua il verso del prodotto vettoriale b a a×b b a Proprietà del prodotto vettoriale Il modulo del prodotto vettoriale è pari all’area del parallelogramma individuato dai due vettori Il prodotto vettoriale è nullo se i due vettori sono paralleli (θ=0) Il prodotto vettoriale gode della proprietà anticommutativa: b a a b b θ a Prodotto vettoriale in componenti cartesiane Tenendo conto che i versori degli assi cartesiani sono a due a due perpendicolari fra loro, ed applicando la regola della mano destra, si hanno le seguenti relazioni: iˆ iˆ 0 iˆ ˆj kˆ iˆ kˆ ˆj ˆj iˆ kˆ ˆj ˆj 0 ˆj kˆ iˆ kˆ iˆ ˆj kˆ ˆj iˆ kˆ kˆ 0 Pertanto, esprimendo i vettori in termini delle loro componenti cartesiane, si ha che: ˆ a b i (a y bz az by ) ˆj(az bx a x bz ) kˆ(a x by a y bx ) iˆ a b ax ˆj kˆ ay az bx by bz Posizione di un punto nello spazio La posizione di un punto materiale nello spazio viene individuata mediante il vettore posizione (o raggio vettore) che congiunge l’origine del sistema di riferimento con il punto materiale. In coordinate cartesiane: r xiˆ yˆj zkˆ z P r O x y Vettore velocità Similmente a quanto fatto nel caso unidimensionale, definiamo la velocità media come r t r t t r t v m t t Che è da intendersi, in coordinate cartesiane, come y t t y t r t x t t x t vm ux uy t t t Cioè come la coppia di velocità medie lungo x e y 23 Vettore velocità La velocità istantanea è, di nuovo, il limite della velocità media quando l’intervallo di tempo tende a zero: x t t x t y t t y t r t v lim lim ux lim uy t 0 t t 0 t 0 t t dx dy ux uy v x ux v y uy dt dt 24 Vettore velocità In coordinate polari avremo r t t t t rf t t rf t vm u uf t t t Ove ora la coppia di velocità è formata dalla velocità radiale (cioè lungo ) e da quella azimutale (cioè lungo f) 25 Vettore velocità E per la velocita` istantanea: rf t t rf t dr t t t v lim u lim uf t 0 t 0 dt t t d drf u uf v u vf uf dt dt È importante esprimere in altro modo la velocità azimutale 26 Vettore velocità Se l’intervallo di tempo è infinitesimo, anche il vettore spostamento sarà tale dr du dfuf dr t r t dt du dfuf r t 27 Vettore velocità Per trovare la velocità basta dividere lo spostamento per l’intervallo di tempo: dr d df u uf dt dt dt Dal confronto con l’espressione precedentemente trovata, abbiamo che la velocità azimutale è df dt dt drf 28 Vettore velocità Interpretazione geometrica del vettore velocita` media: la direzione e` quella della secante alla traiettoria percorsa dal corpo in moto, individuata dai vettori r t e r t t il modulo e` il rapporto tra il modulo del vettore spostamento e l’intervallo di tempo necessario a Considerazioni indipendenti percorrerlo dal sistema di riferimento r t vm r t r t t r t r t t r t r t t 29 Vettore velocità Interpretazione geometrica del vettore velocita` istantanea: la direzione e` quella della tangente alla traiettoria percorsa dal corpo in moto, al tempo t il modulo e` il limite del rapporto tra il modulo del vettore spostamento e l’intervallo di tempo necessario a percorrerlo Considerazioni indipendenti dal sistema di riferimento v t r t r t r t v lim t 0 t r t r t t r t v t r t t 30 Velocita`: riassunto v vx u x v y u y Velocita` in coordinate cartesiane: dy dx v y Componenti: vx dt dt 2 Modulo: v vx v y 2 2 dx dy dt dt Generalizzabile Immediatamente al moto nello spazio 2 Velocita` in coordinate polari: v v u vf uf df d v Componenti: v f dt dt d df dt dt 2 Modulo: v v 2 vf 2 2 31 Spostamento e velocità media P1 = posizione del corpo all’istante t1 P2 = posizione del corpo all’istante t2=t1+Δt Spostamento: Δr r2 r1 (x2 iˆ y2 ˆj z 2 kˆ) (x1 iˆ y1 ˆj z1 kˆ) (x x )iˆ (y y )ˆj (z z )kˆ Δxiˆ Δyˆj Δzkˆ 2 1 2 2 1 Velocità vettoriale media: z P1 r1 Δr P2 r2 O x 1 Δr Δx ˆ Δy ˆ Δz ˆ vM i j k Δt Δt Δt Δt La velocità media ha la stessa y direzione dello spostamento! Velocità vettoriale istantanea La velocità istantanea è definita partendo dalla velocità media e considerandone il limite per Δt→0: Δr dr dx ˆ dy ˆ dz ˆ v lim v M lim i j k Δt 0 Δt 0 Δt dt dt dt dt Le componenti del vettore velocità sono dunque: dx vx dt dy vy dt dz y vz dt Per Δt→0 la direzione dello spostamento tende ad essere tangente alla traiettoria Il vettore velocità istantanea è tangente alla traiettoria Δr Δr r(t) O Δr r(t+Δt) r(t+Δt) r(t+Δt) x Vettore accelerazione E` definito come dv t a dt Usando per convenienenza la coordinata curvilinea, eseguiamo la derivata della velocita`: duT t dv df dv t d vt uT t dvt a uT t vt uT v u N aT aN dt dt dt dt dt dt Mentre per definire la velocita` basta il vettore uT, per l’accelerazione ne servono, in generale, due: uT e uN 34 Vettore accelerazione Il primo va a costituire l’accelerazione tangenziale dv aT uT dt cioe` tangente alla traiettoria: e` relativo alla variazione di modulo della velocita` Il secondo l’accelerazione normale, cioe` df uN perpendicolare alla traiettoria e verso la convessita` a N v dt di questa: e` relativo alla variazione di direzione della velocita` aT v t v t t aN 35 Accelerazione Siano v1 e v2 le velocità del punto materiale agli istanti di tempo t1 e t2=t1+Δt v 2 v1 Δv Accelerazione media: a M t 2 t1 Δt Accelerazione istantanea: v(t Δt) v(t) dv a lim a M lim Δt 0 Δt 0 Δt dt dv x d 2 x ax 2 dt dt d2y ay 2 dt dt dv y dv z d 2 z az 2 dt dt In generale il vettore a avrà una componente parallela alla traiettoria (accelerazione tangenziale) ed una componente perpendicolare alla traiettoria (accelerazione normale) Moto balistico Consideriamo una particella che si muove in 2 dimensioni con velocità iniziale v0 e accelerazione di gravità g costante y 2 g g ˆj (g 9,8m/s ) g v0 v0y y0 O Posizione iniziale: (x0 , y0 ) θ0 v0x Velocità iniziale: v0x v0 cos θ0 v0y v0 sin θ0 x x0 Il moto orizzontale ed il moto verticale sono indipendenti: asse x: moto rettilineo uniforme con velocità v0x asse y: moto uniformemente accelerato con velocità iniziale v0y e accelerazione -g Equazioni del moto balistico Asse x: x x0 v0xt x x0 v0 cosθ0 t v x v0 cosθ0 Asse y: 1 2 1 2 y y0 v0yt gt y y0 v0 sinθ0 t gt 2 2 v y v0 sinθ0 - gt Equazione della traiettoria: x x0 t v0 cosθ0 1 (x x0 )2 y y0 tgθ0 (x x0 ) g 2 2 2 v0 cos θ0 La traiettoria è un arco di parabola con concavità verso il basso Gittata orizzontale Consideriamo il caso di un proiettile che parte dall’origine del sistema di riferimento (x0=0, y0=0): 1 x2 Traiettoria: y tgθ0 x g 2 2 v0 cos 2 θ0 y 1 x 0 y 0 x tgθ0 g 2 2 2 v0 cos θ0 2v02 v02 x 0 x sinθ0 cosθ0 sin2θ0 g g La gittata è massima per θ0=45° Formule valide solo se la quota di arrivo è uguale a quella di partenza! O xG x Punto di massima altezza y yH H y0 O x0 xH x v0 sinθ0 v sinθ0 gt 0 t Nel punto di altezza massima vy=0: 0 g v02 sinθ0 cosθ0 x H x0 v0 cosθ0 t x0 g v02 sin 2θ0 1 2 y H y0 v0 sinθ0 t gt y0 2 2g Moto circolare Sono i moti che avvengono lungo una circonferenza Poiche’ la velocita` cambia direzione continuamente, deve essere sempre presente un’accelerazione Se la velocita` e costante in modulo il moto si dice uniforme Si puo` descrivere il moto o con la coordinata curvilinea s o con la coordinata angolare , corrispondente all’angolo al centro sotteso da s s R 41 Moto circolare Similmente a quanto fatto per il moto unidimensionale, si definiscono Posizione angolare Spostamento angolare Velocita` angolare media m t d Velocita` angolare istantanea dt Accelerazione angolare media Accelerazione angolare istantanea m t d d 2 2 dt dt 42 Moto circolare In un moto circolare la velocita` radiale e` sempre nulla, poiche’ il raggio vettore non cambia in modulo (ma solo in direzione) La velocita` coincide quindi con la velocita` azimutale La velocita` e` costante se e solo e` tale la velocita` angolare d v 0 dt v v d R dt vt R t 43 Moto circolare uniforme Il modulo della velocita` e` costante Quindi l’accelerazione tangenziale e` nulla Rimane l’accelerazione normale (centripeta) v2 a aN 2R R Il moto e` periodico con periodo T pari al tempo di percorrenza della circonferenza: T 2R 2 v 44 Moto circolare non uniforme Cioe` il modulo della velocita` non e` costante In questo caso c’e` accelerazione tangenziale Inoltre l’accelerazione centripeta non e` costante, cio` e` conseguenza della formula2 che la lega alla v velocita`: aN R Inoltre dalla relazione tra velocita` e velocita` angolare segue che quest’ultima non e` costantev e R quindi esiste un’accelerazione angolare d d v 1 dv 1 aT dt dt R R dt R 45 Esempio: moto circolare uniformemente accelerato Cioe` con accelerazione angolare costante Dalla formula precedente cio` equivale ad avere un’accelerazione tangenziale costante Integrando l’equazione che definisce , troviamo per la velocita` angolare: 0 t E l’accelerazione centripeta risulta dipendente dal tempo: aN 2 R R0 t 2 46 Moto circolare uniforme Se proiettiamo il moto sui due assi cartesiani, con origine nel centro x R cos R cost 0 della circonferenza: Ove 0 e` il valore assunto y R sin R sint 0 dall’angolo al tempo t=0 Abbiamo ottenuto l’importante risultato che il moto circolare uniforme puo` essere pensato come R la sovrapposizione vettoriale di due moti armonici di ugual ampiezza, sfasati di un quarto di periodo 47 Moto circolare uniforme La traiettoria è una circonferenza La velocità è costante in modulo (ma non in direzione e verso!) 2π R Periodo: T v v(t) v t α R v(t) α Δv v(t+Δt) v(t+Δt) α Δv 2vsin 2 R α O Accelerazione centripeta v Δt v Δt 2vsin 2 sin Δv v 2R 2R vΔ t Δt Δt R 2R v(t) Δv v 2 a lim Δt 0 Δt R v(t) α β Δv v(t+Δt) v(t+Δt) α a O π Δt 0 α 0 β 2 Δv e v perpendico lari a diretto verso il centro L’accelerazione è centripeta ed in modulo vale v2/R Vettore velocita` angolare Possiamo considerare la velocita` angolare del moto circolare un vettore d Il modulo e` dt La direzione e` perpendicolare al piano del moto circolare Il verso e` determinato con 2a regola della mano destra: e` indicato dal pollice e la rotazione dalle altre quattro dita Introduciamo il concetto di asse di rotazione: e` la retta perpendicolare al piano del moto circolare passante per il centro della circonferenza Si deve pensare che il vettore sia applicato ad un punto (per altro arbitrario) dell’asse di rotazione 50 Vettore velocita` angolare Grazie ad possiamo la esprimere velocita` come v r Ove r e` il vettore distanza tra il punto di applicazione di v e quello di (punto arbitrario sull’asse di rotazione) Derivando rispetto al tempo otteniamo il vettore accelerazione angolare Calcoliamo l’accelerazione a con le due componenti tangenziale e centripeta: dv d d dr a r r dt dt dt r v aT a N r v r dt v aN aT 51 Esercizio Trovare il moto risultante dalla sovrapposizione dei due moti lungo x e y x R cos t y R cos t 52 Esercizio Dati i due moti lungo x e y x a cos t y b sin t Trovare: a) l’equazione della traiettoria, eliminando il tempo dalle equazioni; b) l’espressione della distanza radiale (t); c) l’espressione della coordinata angolare f(t); d) il vettore velocita` in coordinate cartesiane; e) il vettore velocita` in coordinate polari 53 Esercizio Un punto P si muove di moto rettilineo Un osservatore O, che non giace sulla retta percorsa da P, vede il punto muoversi con velocita` angolare Trovare come varia in funzione della posizione di P P h O 54
© Copyright 2026 Paperzz