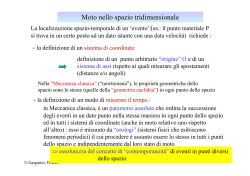
Moto vario di un punto materiale. Consideriamo per ora un moto su un piano. Nel caso del moto circolare con centro nell'origine la distanza dal punto O rimane invariata mentre l'angolo θ(t) varia nel tempo. ! In questo caso varia sia l'angolo θ(t) che la distanza r(t) . ! Possiamo quindi affermare che varia il vettore r(t + Δt) = , varia sia la direzione-‐verso che il modulo. ! Al tempo t la posizione del punto materiale è descritta da r (t) , al tempo t+Δt è descritta ! ! ! ! ! ! da r (t + Δt) = r (t) + Δr dove, come si vede dal disegno Δr = Δr// + Δr⊥ . ! ! ! Il termine Δr// descrive la variazione del modulo di r (t) , il termine Δr⊥ descrive di ! quanto "è ruotato il vettore r (t) nel tempo Δt". Abbiamo definito velocità media di un punto materiale che si muove sull'asse x come x(t + Δt) − x(t) Δx d e velocità istantanea v x (t) = x(t). v x (t) = = Δt Δt dt ! d Generalizzando potremmo definire v y (t) = y(t) e quindi rappresentare il vettore v(t) dt ! mediante le sue componenti v ≡ (v x , v y , 0) . "d % ! d ! d d ˆ ] = $ r(t)' ⋅ r(t) ˆ + r(t)⋅ r(t) ˆ . Analogamente potremmo scrivere v(t) = r (t) = [ r(t)⋅ r(t) # dt & dt dt dt !d $ ! ˆ , è un vettore diretto ed orientato come r (t) il cui modulo rappresenta la variazione con cui varia nel tempo la Il prime termine, # r(t)& ⋅ r(t) " dt % d ˆ deve essere ancora un vettore: la derivate di un versore è un vettore. distanza dal punto O. Il secondo termine r(t)⋅ r(t) dt 1 Moto vario di un punto materiale. La derivate di un versore si definisce come ˆ ˆ + Δt) − r(t) ˆ dr(t) r(t . = lim Δt→0 dt Δt Come già detto il risultato è un vettore che ha la stessa direzione e verso del ˆ + Δt) − r(t) ˆ quando Δt diventa infinitesimo. vettore Δrˆ = r(t ˆ ed il suo verso sarà definito dal verso del Tale vettore sarà ortogonale ad r(t) moto (da P1 a P2). Chiamiamo ηˆ (t) il versore che rappresenta tale direzione-‐ verso. E' chiaro che il versore mantiene il modulo =1 e può cambiare nel tempo solo la direzione, può ruotare. Supponiamo che nell'intervallo di tempo Dt ruoti di un angolo ˆ ˆ + Δt) − r(t) ˆ Δθ dr(t) r(t Dq. In tal caso possiamo scrivere . Dal disegno possiamo = lim Δt→0 dt Δθ Δt ˆ + Δt) − r(t) ˆ è osservare che il numeratore del rapporto incrementale Δrˆ = r(t Δθ rappresentato dal segmento P1P2 = 2 ⋅ AP2 = 2 ⋅ rˆ sin per cui sostituendo abbiamo 2 Δθ (t) Δθ (t) 2 ⋅ rˆ sin sin ˆ dr(t) Δ θ (t) 2 2 Δθ (t) = rˆ ⋅ Δθ (t) = ω (t) = lim = rˆ ⋅ lim Δt→0 Δθ (t) dt Δθ (t) Δt Δt Δt Δt→0 2 . ˆ + Δt) r(t O θ Δ ˆ r(t) P2 ˆ + Δt) − r(t) ˆ Δrˆ = r(t A P1 sin x Δθ (t) ˆ = 1 e definendo la velocità angolare ω (t) = . = 1 , che r(t) x→0 x Δt Abbiamo ottenuto tale risultato ricordando che lim Ma come abbiamo già detto la derivate di un versore è un vettore; ne abbiamo calcolato il modulo e sappiamo che direzione e verso sono date ˆ dr(t) dal versore ηˆ (t) . Possiamo in definitiva scrivere = ω (t)ηˆ (t) (formula di Poisson). Nel caso più generale della derivata di un vettore, che dt ! ! ! da(t) d a(t) ˆ + a(t) ω (t)ηˆ (t) . = a(t) ruoti con velocità angolare ω (t) , scriveremo dt dt 2
© Copyright 2026 Paperzz