pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
1
「わかりやすい電気機器」の演習問題解答例
天野 耀鴻,乾 成里 著
********** 第1章の章末演習問題解答 **********
問題 1.1 静止している 7 [kg] の物に 3 [N] の力を与えたときの加速度を求めよ.
ただし,物体と置かれている面との間に摩擦は無視する.
解答: 質点系には式 F = m ·
dv
の関係があり,ただし,F は力 [N],m は質量
dt
[kg],(dv)/(dt) は加速度 [m/s2 ] である.物体と置かれている面との間の摩擦を無
dv
視すれば,加速度は
= 3/7 ≈ 0.47[m/s] となる.
dt
問題 1.2 電動機の出力が 3.7 [kW],回転数が 1710 [rps] のとき,電動機の発生ト
ルクを求めよ.
解答: 回転運動系に出力パワー P [W] と電動機の発生トルク τ [N·m] の関係は次
式となる.
P = τ · 2π · n,
τ =
P
3700
=
≈ 0.34 [N · m]
2π · n
2π · 1710
問題 1.3 磁束密度 B = 0.8 [T] の磁界中に置かれた長さ L = 1 [m],自身の抵抗
r = 0.2[Ω] の導体に対して次のような回答を求めよ.
1.
図 1.23(a) のように,導体を速度 v で磁界と直角方向に運動させ,導体の両端
に接続した R = 4[Ω] の抵抗に P = 100 [W] の電力を供給するとき,導体の速
度 v 及び加えられる力 F を求めよ.
2.
図 1.23(b) のように,導体の両端に E = 18 [V] の電圧を加えて導体に下向き
に F = 8 [N] の力を加えた場合,導体に流れる電流の大きさ i,及び,速度 v
を求めよ.
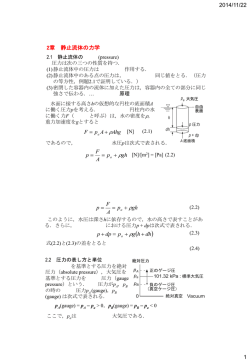
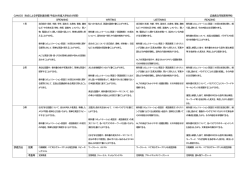
解答:1 [解析] 解答図 (a) のように,磁束密度が B [T] の磁界において長さ L
[m] の導体を一定の速度 v で動かした場合の動作について考える.導体には起電力
が誘導され,その大きさ e が e = vBL [V] より求められる.フレミングの右手法則
より,誘導起電力の向きは解答図 (a) の方向となる.導体の両端に接続した抵抗を
R [Ω],導体を含む回路の抵抗を r [Ω] とすると,電流 i = e/(R + r) が流れること
より,電磁力 F を生じ,その大きさは F = iBL となり,方向は下向となる.よっ
て,導体が上方向に速度 v で運動を続けるためには電磁力 F と大きさが等しい外
力 F ′ を上方向に加える必要があり,導体に加えられる単位時間当たりの機械的エ
ネルギー(動力)P は P = F ′ v となる.ただし,F ′ = F = iBL,v = e/(BL) で
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
2
「わかりやすい電気機器」の問題解答例
図 1.23 磁界中に置かれた導体
あることより,機械的エネルギー P は次式となる.
P = F · v = iBL ·
e
= i · e = i2 (R + r)
BL
[計算] 誘導起電力 i は i =
√
P/(R + r) =
√
100/(4 + 0.2) ≈ 4.9[A] となり,e は
e = P/i = 100/4.9 ≈ 20.4 [V] となる.
導体の速度 v は v = e/(BL) = 20.4/(0.8 × 1) ≈ 25.5 [m/s],加えられる外力 F
は F = iBL = 4.9 × 0.8 × 1 = 3.9 [N] である.
解答:2 [解析] 解答図 (b) のように,磁束密度が B [T] の磁界において長さ L
[m] の導体の両端に E [V] の起電力を供給して外力 F を加えた場合の動作について
考える.導体には電流 i が流れ,図の上方向に電磁力 F ′ を生じ,速度 v での運動を
始める.平衡状態では電磁力と外力の間に F = F ′ = iBL の関係が成り立ち,導
体の速度を v ,誘導起電力を e,回路の全抵抗を r [Ω] とすると,回路には次式の関
係がある.
E = e + i · r = vBL + i · r
ただし,電源から供給される電力 P は次式となる.
P = E × i = (vBL + i · r) × i = vBLi + i2 r = vF + i2 r
[計算] 上の説明より,導体に流れる電流は i = F/(BL) = 8/(0.8 × 1) = 10 [A],
導体の運動速度は v = (E − i · r)/(BL) = (18 − 10 × 0.2)/(0.8 × 1) = 20 [m/s] と
なる.
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
v
e, i
F
e
i
解答図 磁界中に置かれた導体
3
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
4
「わかりやすい電気機器」の問題解答例
********** 第2章の章末演習問題解答 **********
問題 2.1 直流機の励磁方式を4種類あげ,それぞれの励磁方式について回路を
簡単に書いて説明せよ.
解答: 略
問題 2.2 直流機の電機子反作用について簡単に説明せよ.
解答: 略
問題 2.3 6 極の直流発電機において電機子の直径が 0.5 [m],軸方向の長さが 0.6
[m],電機子コイル数が 64,コイル 1 個の巻数が 25,巻線は重ね巻,ギャップの磁
束密度が 0.8 [T] である場合,この発電機を 1200 [rpm] で回転させたときの誘導起
電力を求めよ.
解答: [ヒント:教科書 p.33 の例 2.3 を参照すること]
式(2.26)より,巻線の重ね巻では a = P = 6 を考えると,誘導起電力 Ea は次
のように求められる.
1
Dlπ2 · m · ωBav · n
a
1
1200
= × 0.5 × 0.6 × 3.14 × 2 × 64 × 25 ×
= 8, 038 [V]
6
60
Ea =
問題 2.4 定格電圧 100[V],定格電流 7[A],電機子抵抗 0.1[Ω] の直流機がある.
これを電動機として使い,全負荷で発電機のときと同じ速度で回転させるのに必要
な端子電圧を求めよ.ここで,電機子反作用と励磁電流を無視する.
解答: 発電機の時誘導起電力を Eag ,端子電圧を Vg とすると,Eag = Vg + ra Ia
[V],電動機の時誘導起電力を Eam ,端子電圧を Vm とすると,Eam = Vm − ra Ia
[V] が得られる.
両者を同じ速度で回転させる場合,直流機の誘導起電力と電機子電流が変わらない
ので,電動機の端子電圧 Vm は次式となる.
Vm = Eam + ra Ia = Eag + ra Ia = (Vg + ra Ia ) + ra Ia
= Vg + 2ra Ia = 100 + 2 × 0.1 × 7 = 101.4 [V]
問題 2.5 電機子抵抗が 0.1[Ω] の直流分巻発電機がある.回転速度が 1500[rpm],
端子電圧が 110[V] のときの電機子電流は 100[A] である.この発電機を分巻電動機
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
5
として使用し,端子電圧 110[V] で運転したところ電機子電流は 80[A] であった.
このときの回転数を求めよ.ここで,電機子反作用の影響は無視する.
解答: [ヒント:分巻直流機ので端子電圧が等しければ,界磁電流によって電動
機磁束は等しくなること]
教科書 p.33 の式(2.25)より,誘導起電力 Ea = Ka ϕωm [V] が得られることを
考える.
発電機動作のとき,誘導起電力を Ea1 ,角速度を ωm1 = 2πn1 ,回転速度を n1 と
して教科書 p.23 の式(2.4)より,起電力 Ea1 は次式となる.
Ea1 = Ka ϕωm1 = V + ra · Ia = 110 + 0.1 × 100 = 120 [V]
電動機動作のとき,誘導起電力を Ea2 ,角速度を ωm2 = 2πn2 ,回転速度を n2 と
して教科書 p.23 の式(2.5)より,起電力 Ea12 は次式となる.
Ea2 = Ka ϕωm2 = V − ra · Ia = 11 − 0.1 × 80 = 102 [V]
電動機として使用するときの回転速度は次のように計算できる.
Ea1
Ka ϕωm1
ωm1
2πn1
102
=
=
=
=
,
Ea2
Ka ϕωm2
ωm2
2πn2
120
n2 =
102
× 1500 = 1275 [rpm]
120
問題 2.6 直流他励電動機の端子電圧が 215[V],電機子電流が 50[A],電機子全抵
抗が 0.1[Ω] である.1500[rpm] で回転させたときの発生トルクを求めよ.
解答: [ヒント:教科書 p.51 において直流電動機の基本式を参照すること]
直流他励電動機では誘導起電力が Ea = V − Ra Ia = 215 − 0.1 × 50 = 210 [V] と
なる.ここで,鉄損や機械損などを無視すると,出力パワー Pout は次式となる.
Pout = Ea Ia = 210 × 50 = 10500 [W] = 10.5 [kW]
電動機の回転角速度 ωm は ωm = 2π ×
1500
= 2 × 3.14 × 25 = 157 [rad/s] と
60
なる.
この定格時において発生トルク Tm は Tm = Pout /ωm = 10.5 × 103 /157 ≈ 66.9
[N· m] である.
問題 2.7 直流分巻電動機で,電圧が V ,電機子抵抗が Ra ,界磁抵抗が Rf ,全
負荷電流 I を流したときの回転数は n である.この電動機の電機子回路に抵抗 Ra
の値を求めよ.
解答: [ヒット:教科書 p.53 の節 2.7.3 を参照すること] 略
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
6
問題 2.8 電源電圧が 110[V] で運転している直流直巻電動機は,定格トルクの下
で電機子電流 100[A] で回転速度が 1800[rpm] である.負荷トルクが 1/2 に低下し
た場合の電機子電流および回転速度を求めよ.ただし,電機子回路抵抗は 0.1[Ω],
磁気特性は線形とする.
解答: [ヒント:教科書 p.56 において図 2.37 を参照すること]
直流直巻電動機では式 (2.50) よりトルク T は T = Ka k1 Ia2 となり,トルクが定
1
2
1
2
格の 1/2 になる場合, T = Ka k1 [ √ Ia ] となり,このときの電機子電流 Ia 1 は
Ia 1
2
2
√
= 100 × 1/ 2 = 70.7 [A] となる.
2
式(2.51)より,電動機の回転角速度 ωm [rad/s] と回転速度 N [rpm] の関係は
ωm =
2π
60
N ,N =
ωm となり,磁界回路の抵抗が小さくて無視されるとき,
60
2π
N = K(
V
− Ra ),
Ia
K=
60 1
2π Ka k1
110
− 0.1) = K が得られる.
100
110
トルクが 1/2 に低下するとき,回転速度は N = 1800 × (
− 0.1) = 2628 [rpm]
70.7
となる.回転速度 N = 1800 [rpm] とき,1800 = K(
となる.
問題 2.9 直流他励電動機で,定格電機子端子電圧が 100[V],定格電機子電流が
10[A],定格電機子電圧で定格負荷時の回転数が 1800[rpm],電機子抵抗が 0.1[Ω]
である.この電動機を発電機として運転し負荷へ電圧 100[V] で,電力 1[kW] を供
給している場合のトルク及び回転数を求めよ.ここで,電機子鉄損,機械損は無視
する.
解答: 電動機として運転するとき,逆起電力 Eam と端子電圧 Vam の関係は次式
となる.
Eam = Vam − Ra Ia = 100 − 0.1 × 10 = 99 [V]
発電機として運転するとき,逆起電力 Eag と端子電圧 Vag の関係は Eag =
Vag + Ra Ia なり,発電機では電力 Pout = 1 [kW],端子電圧 Vag = 100 [V],
電機子電流 Ia = Pout /Vag = 1000/100 = 10 [A] の場合,逆起電力は Eag =
Vag + Ra Ia = 100 + 0.1 × 10 = 101 [V] となる.
発電機の回転数 Ng と電動機の回転数 Nm の関係式より,発電機の回転数は
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
7
Nag
101
60
· Nm =
× 1800 = 1836 [rpm] となり,トルク Tg = Eag Ia Ng =
Nam
99
2π
60
16.5
101 × 10 ×
× 1836 =
≈ 5.25 [N·m] となる.
2π
π
Ng =
問題 2.10 直流直巻電動機で,定格電機子端子電圧が 100[V],定格電機子電流が
20[A],定格回転数が 1800[rpm],界磁電流が 1[A],電機子回路抵抗が 0.1[Ω],界磁
巻線抵抗が 0.4[Ω] である.負荷トルクが定格トルクの 1/4 に減少した場合の電機子
電流および回転数を求めよ.ただし,電機子端子電圧は一定で,電機子反作用,磁
気回路の飽和の影響,鉄損,機械損は無視する.
解答: [ヒント:教科書 p.56 において直流直巻電動機を参照すること]
定格運転のとき,式 (2.51) より回転数 N = 1800 [rpm] が次式で計算できる.
{
}
N =
60
60
1
ωm =
·
2π
2π Ka k1
60
1
=
·
2π Ka k1
N = 43.0
1
,
Ka k1
{
V
− (Ra + Rf s )
Ia
100
− (0.1 + 0.5)
20
Ka k1 =
}
43.0
= 0.02
1800
定格のトルク T は T = Ka k1 · Ia2 [N·m] である.トルクが 1/4 に減少するとき,
1
1
1
T = Ka k1 · Ia2 = Ka k1 · [ Ia ]2 となり,電機子電流 Ia 1 は Ia 1 = Ia /2 = 10 [A]
4
4
4
4
2
1
となり,回転数 N は次式となる.
4
N1 =
4
=
60
60
1
ωm =
·
2π
2π Ka k1
60 1
2π 0.02
{
{
}
V
− (Ra + Rf s )
Ia 1
4
100
− 0.5) = 4, 538 [rpm]
10
}
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
8
「わかりやすい電気機器」の問題解答例
********** 第3章の章末演習問題解答 **********
問題 3.1 水車同期発電機の定格が 60 [Hz] で回転速度 200 [rpm] であるとき,こ
の同期発電機の極数を求めよ.
解答: 教科書 p.73 の式 (3.1) より,
同期発電機の極 P は P =
120 × 60
120 · f
=
=
Ns
200
36 [極] となる.
問題 3.2 三相同期発電機で,定格仕様が出力 300 [kVA],電圧 600 [V],力率 80
%,効率 97 % である場合,定格電機子電流と発電機の機械入力を計算せよ.
解答: [ヒント:教科書 p.87 の節 3.5 を参照すること]
定格時の端子電圧 (線間電圧) を Vn ,電機子電流を In とすると,発電機の出力容
量P はP =
√
3Vn In となり,電機子電流は In = √
P
300 × 103
=
≈ 288.7 [A]
1039.2
3Vn
となる.
電気出力 PE
× 100% と電気出力 PE = P · cos ψ の関
機械入力 PM
係式より,発電機の機械入力は次の式となる.
また,発電機の効率 η =
PM =
P
PE · cos ψ
300 × 103 × 0.8
=
=
≈ 247.4 [kW ]
η
η
0.97
問題 3.3 非突極形三相同期発電機で,線間端子電圧
√
3V ,電機子電流 Ia ,力率
cos(ψ) の場合,この負荷角 δ を求めよ.ここで,同期リアクタンス xs として電機
子抵抗を無視する.
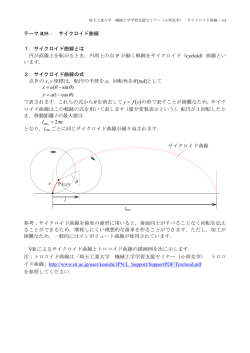
解答: 三相同期発電
機での三相出力 PE は
PE = 3·V Ia cos ψ とな
り,負荷角 δ との関係
が式 (3.44) より PE =
解答図 電機子抵抗 rs = 0 ときのベクトル図
V E0
3
· sin(δ) となる.
xs
電機子抵抗 rs = 0 ときのベクトル図より,負荷角 δ は次式となる.
√
E0 =
V 2 + 2V xs Ia sin ψ + (xs · Ia )2 ,
δ = sin−1 (
xs Ia cos ψ
)
E0
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
9
問題 3.4 同期発電機の単位法で示した同期リアクタンスが xs =1,負荷力率 0.8
のときの電圧変動率を算定せよ.ここで ra = 0 とする.[注:読者に計算しやすいた
め,問題の太字で表したデータが変わった数字である.]
解答: [ヒント:教科書 p.94 の節 3.6.4 を参照すること]
一般的に無負荷誘導起電力 E0 と無負荷端子電圧 V0 が等しいので,式 (3.53) より
V0 − Vn
E 0 − Vn
E0
× 100% =
× 100% = (
− 1) × 100% と
Vn
Vn
Vn
なる.電機子抵抗 ra = 0 とき,式 (3.54) よって次式が得られる.
電圧変動率 ϵ は ϵ =
√
E0 =
(Vn cos ψ)2 + (Vn sin ψ)2 + 2xs In Vn sin ψ + (xs In )2
√
E0
=
Vn
1 2
2xs In Vn sin ψ
(xs In )2
Vn (cos2 ψ + sin2 ψ) +
+
2
2
Vn
Vn
Vn2
√
=
1 + 2(
xs In
xs In 2
) sin ψ + (
)
Vn
Vn
xs In
は単位法で表した同期リアクタンスなので,E0 /Vn =
Vn
√
√
2 + 2 sin ψ であるとき,ϵ = ( 2 + 2 sin ψ − 1) × 100% となる.
式 (3.52) より,ここで
力 率 は cos ψ = 0.8 よ り ,遅れ力率sin ψ = 0.6 の 場 合 ,電 圧 変 動 率 は ϵ =
√
( 2 + 2 · 0.6 − 1) × 100% = 79% となり,進み力率sin ψ = −0.6 の場合,電圧
√
変動率は ϵ = ( 2 − 2 · 0.6 − 1) × 100% = −10.56% となる.
問題 3.5 同期リアクタンス 1.2(単位法)のタービン同期発電機が定格電圧で,
定格力率 0.8 の遅れ電流で定格出力 [kVA] を発生するときの無負荷誘導起電力(単
位法)と電圧変動率を求めよ.ただし,電機子抵抗を無視する.
解答: [ヒント:問題 3.4 を参照すること]
xs In
= 1.2,および,力率
Vn
は cos ψ = 0.8 より,遅れ力率 sin ψ = 0.6 のとき,式 (3.54) から次式が得られる.
電機子抵抗 ra = 0,単位法で表した同期リアクタンス
√
E0
=
Vn
=
1 + 2(
√
xs In
xs In 2
) sin ψ + (
)
Vn
Vn
1 + 1.22 + 2 × 1.2 × 0.6 = 1.55
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
10
「わかりやすい電気機器」の問題解答例
xs In
は単位法で表した同期リアクタンスなので,E0 /Vn =
Vn
√
E0
− 1) × 100% となる.
2 + 2 sin ψ であるとき,ϵ = (
Vn
E0
力率は cos ψ = 0.8 より,遅れ力率sin ψ = 0.6 の場合,電圧変動率は ϵ = (
−
Vn
1) × 100% = 55% となる.
式 (3.52) より,ここで
問題 3.6 三相同期発電機で,出力 500 [kVA],電圧 600 [V],励磁電流 180 [A] に
相当する無負荷端子電圧が 600 [V],短絡電流 540 [A] の場合,この同期発電機の短
絡比および百分率同期インピーダンスを計算せよ.
解答: [ヒント:教科書 p.92 の例 3.4 を参照すること]
P
500 × 103
= √
≈ 481.1 [A],
3V
3 × 600
同期発電機の定格電流は In = √
Is
540
=
≈ 1.12,
In
481.1
Zs In
1
百分率同期インピーダンスは Zs =
× 100% =
× 100% = 89.3% である。
Vn
Ks
短絡比は Ks =
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
11
********** 第4章の章末演習問題解答 **********
問題 4.1 三相同期電動機の定格仕様が出力 3000 [kW],電圧 3000 [V],効率 95 %,
力率 85 % である場合,この電動機の定格電流を計算せよ.
解答: 端子電圧を Vn ,電機子電流を In ,力率を cos ψ ,効率を η とすると,三相
電気入力 PE は
√
3Vn In cos ψ ,定格出力(機械出力)PM は PM = PE × η である
ので,定格電流 In は次式となる.
In = √
PM
3000 × 103
= √
= 203 [A]
3Vn cos ψ × η
3 × 3000 × 0.85 × 0.98
問題 4.2 三相同期電動機で,端子電圧および無負荷誘導起電力は線間で 7000
[V] および 6400 [V],同期リラクタンスは 10 [Ω] で電機子抵抗を無視する.負荷角
30o のとき,出力 P [kW] と電機子電流 Ia [A] を求めよ.
解答: [ヒント:教科書 p.114 の節 4.4 を参照すること]
電機子抵抗を無視すると
き ,式 (4.26) よ り 一 相 当 た
m
り の 機 械 出 力 Pm は Pm ≈
Vm E 0
sin(δ) [W] となる.た
xs
だ し ,電 機 子 電 圧 を Vm =
√
7000/ 3 [V],無負荷誘導起
√
電力を E0 = 6400/ 3 [V] と
解答図 電機子抵抗 rs = 0 ときのベクトル図
する.三相同期電動機の出力
PM は次式となる.
PM
√
√
Vm E 0
7000/ 3 × 6400/ 3 × sin(30o )
= 3·
·sin(δ) = 3×
≈ 2, 240 [kW]
xs
10
解答図のベクトル図より,電機子電流 Ia は次のように求められる.
√
xs Ia =
2 + E 2 − 2 · V E cos δ
Vm
m 0
0
√
Ia =
2 + E 2 − 2 · V E cos δ
Vm
m 0
0
xs
≈ 203 [A]
問題 4.3 三相同期電動機で,極数 12 極,周波数 50 [Hz],電圧 6000 [V],1相当
たりの同期リラクタンス 9 [Ω],電機子抵抗は無視する.この同期電動機を1相の
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
12
「わかりやすい電気機器」の問題解答例
無負荷誘導起電力が 2500 [V] になるように励磁した場合の脱出トルク [kgf·m] を求
めよ.
解答: 電機子抵抗が無視できる場合,教科書 p.116 の式 (4.27) よってトルク T は
T =
pVm E0
3Pm
=3
sin(δ) となり,負荷角 δ = π/2 のとき,最大トルク Tmax は
ωs
2πf xs
次式となる.
Tmax
√
6 × (6000/ 3) × 2500
=3×
= 55162 [N· m] = 5628 [kgf · m]
2π × 50 × 9
ここで,1 [kgf· m]=9.8 [N · m] である.
問題 4.4 三相同期電動機で,極数 12 極,周波数 50 [Hz],同期リラクタンス 6
[Ω],線間端子電圧 6600 [V],線間無負荷誘導起電力 6000 [V],負荷角 30o ,電
機子抵抗を無視する場合,この同期電動機の出力,トルク,電機子電流,力率をそ
れぞれ求めよ.[注:読者に計算しやすいため,問題の太字で表したデータが変わった数
字である.]
√
解答: 相電圧で示した端子電圧 Vm は Vm = 6600/ 3 = 3811 [V],無負荷誘導
√
起電力 E0 は E0 = 6000/ 3 = 3463 [V] となる.電機子抵抗が無視できる場合,電
気入力は機械出力と同じになる.三相同期電動機の出力 PM は次式となる.
PM = 3 ×
1
× 3811 × 3464 × 0.5 = 3300 [kW]
6
教科書 p.108 の式 (4.5) より同期角速度 ωs は ωs = (2πf )/p = 2π × 50/6 = 52.3
[rad/s] であるので,この電動機トルク T は T = PM /ωs = 3300 × 103 /52.3 =
63098 [N· m] = 6438 [kgf · m] となる.
問題 4.2 の解答図を参照することより,電機子電流 Ia は次のように得られる.
√
Ia =
=
1
xs
2 + E 2 − 2V E cos δ
Vm
m 0
0
1√
38112 + 34642 − 2 × 3811 × 3464 cos 300
6
= 319 [A]
電気入力が
√
3Vn Ia cos ψ = PM なので,力率 cos ψ は次式となる.
cos ψ = √
PM
3300 × 103
= √
= 0.905
3Vn Ia
3 × 6600 × 319
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
13
問題 4.5 三相突極形同期電動機で,極数 6 極,周波数 50 [Hz],定格電圧 6600
[V],定格電流 200 [A],無負荷誘導起電力 6000 [V],直軸同期リラクタンス
xd = 1.2[pu],横軸同期リラクタンス xq = 0.8[pu] である.この同期電動機の最大
出力 Pmax [kW] と最大出力時の負荷角 δm および δ = 30o で運転するときのトル
ク [kgf·m] を計算せよ.ただし,電機子抵抗は無視する.[注:読者に計算しやすいた
め,問題の太字で表したデータが変わった数字である.]
解答: [ヒント:教科書 p.113 の節 4.3.2 を参照すること]
式 (4.19) よって突極形同期電動機の出力 PM は次式となる.
{
}
PM = 3
Vm E 0
V 2 (xd − xq )
sin(δ) + m
sin(2δ)
xd
2xd xq
[W]
ただし,xd ,xq を単位法で表した xd [pu] = (xd In )/Vm ,xq [pu] = (xq In )/Vm で
ある.出力 PM は次のようになる.
{
PM = 3
}
V 2 In
1
1
E 0 In
sin(δ) + m (
−
sin(2δ)
xd [pu]
2
xq [pu]
xd [pu])
√
[W]
√
ここで,Vm = 6600/ 3 = 3811 [V],E0 = 6000/ 3 = 3464 [V],In = 200 [A],
xd = 1.2 [pu],xq = 0.8 [pu] なので,PM =
√
3 × 106 {sin(δ) + 0.275 sin(2δ)} [W]
となる.
最大な出力 Pmax を得るための負荷角 δm は dPM /dδ = 0 のとき,δm = 67o が
得られると,Pmax = 1935 [kW] となる.
また,δ = 30o のとき,出力 PM = 1275 [kW],トルク T は次のように計算さ
れる.
T =
PM
PM · p
=
= 12.2 × 103 [N· m] = 1243 [kgf· m]
ωs
2πf
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
14
「わかりやすい電気機器」の問題解答例
********** 第5章の章末演習問題解答 **********
【問題5.1】
Y0 =
I
0.8
=
= 0.004 [S] = 4 [mS]
V
200
g0 =
P
96
=
= 0.0024 [S] = 2.4 [mS]
V2
2002
√
b0 =
Y02 − g02 =
√
42 − 2.42 = 3.2 [mS]
【問題5.2】
R = r1 + a2 r2 = 0.212 + (
Z =
Ez
5.4
= 0.53645 [Ω]
=
Iz
10.1
Z 2 = R2 + X 2
X =
200 2
) × 0.0473 = 0.4012 [Ω]
100
√
Z 2 − R2 =
√
0.534652 − 0.40122 = 0.35340 [Ω]
【問題5.3】
η1 =
500 × 1.0 × 0.784
= 98%
500 × 1.0 × 0.784 + 5 + 3 × 1.02
η2 =
500 × 0.10061 × 0.4
= 80%
500 × 0.10061 × 0.4 + 5 + 3 × 0.100612
【問題5.4】
1
1
Pout = 200 × 1 × 0.8 × 8 + 200 × × 0.9 × 12 + 200 × × 1 × 2
2
4
= 200(6.4 + 5.4 + 0.5) = 2460 [kwh]
Pi = 2 × 24 = 48 [kwh]
1
1
Pc = 5 × 12 × 8 + 5 × ( )2 × 12 + 5 × ( )2 × 2 = 5(8 + 3 + 0.125) = 55.625 [kwh]
2
4
Pi n = Pout + Pi + Pc = 2563.625 [kwh]
ηday =
Pout
= 95.96%
Pin
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
【問題5.5】 p.169 訂正:
誤:「図に示す Y 結線の」
正::「図に示す Y ーΔ結線の」
Z =
V =
√
42 + 32 = 5 [Ω]
√
2002 + 02 = 200 [V]
V
200
=
= 40 [A]
Z
5
√
I2 = 3I1 = 69.28 [A]
I1 =
15
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
16
「わかりやすい電気機器」の問題解答例
********** 第6章の章末演習問題解答 **********
【問題6.1】
Ns =
N
1584
=
= 1650 [rpm] = 1650 [min−1 ]
1−s
1 − 0.04
Ns =
120f
p
f =
p × Ns
= 55 [Hz]
120
【問題6.2】
Ns =
s =
120f
120 × 60
=
= 900 [rpm]
p
8
Ns − N
900 − 855
=
= 5%
Ns
900
Po = 180 + 10 = 190 [kw]
P2 =
Po
190
=
= 200 [kw]
1−s
1 − 0.05
Pc2 = s × P2 = 0.05 × 200 = 10 [kw]
【問題6.3】
p≒
120f
120 × 55
=
= 4.0816…
N
1617
極数 p は偶数であるから,p = 4 と仮定する.
Ns =
s =
120f
120 × 55
=
= 1650 [rpm]
p
4
Ns − N
1650 − 1617
=
= 2%
Ns
1650
妥当な値なので,仮定は正しい.(題意より,損失を考慮しないので,)
Po = Pin =
I1 = √
【問題6.4】
√
3V1 I1 cos θ
60 × 103
P0
= √
= 100 [A]
3V1 cos θ
3× 440 × 0.78729
pLATEX 2ε : Answer˙Electic˙book : 2014/5/20(11:23)
「わかりやすい電気機器」の問題解答例
17
○
×
回転子の電流は,電磁誘導によって誘起される.スリップリングは巻線形誘導
電動機(本書では取り上げていない)で使われる.
×
回転子に渦(うず)電流が流れないと,回転力(トルク)が発生しない.
トルク τ
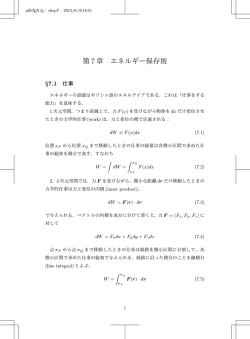
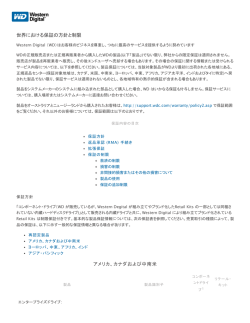
【問題6.5】
B
A
1
0
C
すべり s
回転数 N
0
Ns
図 6A.1 誘導電動機のすべり s-トルクτ 特性
図の左側は,回転数が低い.s = 0, N = 0
図の右側は,回転数が高い.s = 1, N = Ns
領域 C
理由:右下がりなので,負荷増加→回転数低下(すべり増加)→トルク増加→回
転数回復となり,安定した運転が可能であるから。
もし領域A(右上がり)であれば,負荷増加→回転数低下(すべり増加)→トル
ク低下となり,回転できなくなってしまう。
もし領域 B(ピーク付近)であれば,負荷の変動(ゆらぎ)によって,ピークを
越えて領域Aに移りやすいので危険である。
【問題6.6】
[a] ア [b] ニ [c] ヌ [d] ケ [e] ケ [f] ア [g] イ
© Copyright 2026 Paperzz