2014/12/12
技術者のための構造力学
補足資料
補足資料④
資料④ せん断弾性係数と Poisson 比,弾性係数の関係
三好崇夫
加藤久人
等方性材料を仮定すれば,直交座標系(x-y-z)を用いると,x-y,y-z,z-x 面内におけるせん断応力 τ
と(工学)せん断ひずみ γ の関係は,それぞれ次式で表される.
τ = Gγ , τ = Gγ , τ = Gγ
xy
xy
yz
yz
zx
zx
(1)1~3
ここに,G はせん断弾性係数である.
式(1)は等方性材料に対する純せん断試験によって,弾性範囲において計測されるせん断応力とせん断
ひずみの関係に基づいて定義されるもので,単軸引張における以下の Hooke(フック)の法則に対応す
るものである.
σ = Eε
(2)
ここに,σ:軸方向応力,E:軸方向応力,および ε:軸方向ひずみである.
等方性材料の場合には,弾性係数 E,Poisson(ポアソン)比 ν のみで材料の力学的特性を表すことが
できる.しかし,一般的に,せん断ひずみとせん断応力の関係は,せん断弾性係数 G を用いて式(1)のよ
うに表現されることが多い.そこで,本資料では,G と E,ν の関係について説明する.略記のため,
以下では式(1)の右下符号を省略して次のように表すこととする.
τ = Gγ
(3)
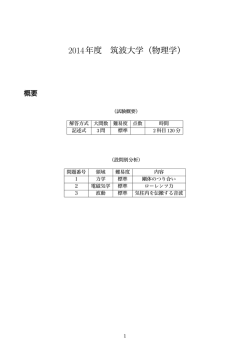
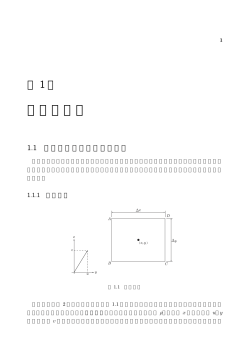
図-1 は x,y 軸と平行に配置された正方形要素 ABCD が純せん断力を受けて菱形 A’B’C’D’に変形し,
それに伴うせん断応力 τ とせん断ひずみ γ を生じた状態を表している.ただし,対称性により,菱形の
各辺は元の正方形要素の対応する辺に対して,いずれも γ/2 ずつ傾いているものとする.図-1 に示す
ような純せん断応力状態では,x,y 軸方向の直応力は σx = 0,σy = 0,x-y 面内のせん断応力は τxy = τ で
ある.よって最大,最小主応力 σ1,σ2 とその方向 α1,α2 は次のように表される.
σ σ +σ 1
(σ − σ
±
=
σ
2
2
1
x
x
) + 4τ
2
y
y
=±
2
xy
1
σ1
σy = 0
A’
γ/2
τxy = τ
σ2
D
A
γ/2
τxy = τ
D’
z
O
εd/2
σx = 0
x
σx = 0
B’
τxy = τ
y
B
σ2
τ
1
4τ 2 =
2
− τ
C
τxy = τ
C’
εd/2
σy = 0
σ1
図-1 単純せん断における変形状態
1
(4)
2014/12/12
技術者のための構造力学
2τ
1
α = tan
2
σ −σ
−1
xy
1
x
1
= tan −1 2τ = 45 (deg .), α 2 = α 1 + π = 135 (deg .)
2
2
0
y
(5)
ただし,式(5)において,α1,α2 は図-1 における x 軸から時計回りに測った角度である.
式(4),(5)の誘導など詳細については,一般的な構造力学に関する文献,例えば文献 1),2)等を参照さ
れたい.
したがって,純せん断応力方向から 45 度の方向には主応力 σ1=τ および σ2=-τ が生ずるため,引張応力
σ1 を生ずる AC 方向には伸び,圧縮応力 σ2 の生ずる BD 方向には縮むことになる.いま,AC 方向の直
ひずみを ε,正方形要素の対角線の長さを d とすると,その伸びは εd で表される.逆に,対角線 BD の
縮みの大きさも εd である.したがって,正方形要素は対称性によって 4 つの頂点は同じ大きさだけ対角
方向に変位することになる.即ち,次式が成立する.
A A ′ = B B ′ = C C ′ = DD ′ = ε d 2
(6)
したがって,変形後の頂角の半分は次式で表される.
tan ∠D′A′O =
D′O DO − DD′ 1 − ε
=
=
A′O
AO + AA′ 1 + ε
(7)
一方で,次式も成立する.
π γ
sin −
π γ
4 2
tan ∠D ′A′O = tan − =
4 2 cos π − γ
4 2
(8)
式(8)の最右辺は加法定理により,
1
γ
γ
π γ
γ
γ
sin − sin π cos γ − cos π sin γ
cos − sin cos − sin
4
2
2
2
2
=
=
4
2
4
2 =
2
2
γ
γ
1
γ
γ
π γ cos π cos γ + sin π sin γ
cos −
cos + sin cos + sin
4
2
4
2
2
2
2
2
2
4 2
(9)
式(9)最右辺の分子,分母をそれぞれ cos(γ/2)で除せば,
π γ
sin − 1 − sin γ cos γ 1 − tan γ
4 2 =
2
2 =
2
γ
γ
γ
π γ
cos
1 + tan
cos − 1 + sin
2
2
2
4 2
(10)
よって,式(8)は次のように表される.
π γ 1 − tan (γ 2)
tan ∠D ′A′O = tan − =
4 2 1 + tan (γ 2)
(11)
式(11)において,γ が十分小さければ,tan(γ/2)≒γ/2 である(例えば,γ/2 = 0.01 rad.として関数電卓で
計算すると tan(0.01) =0.01000333 となる.各自確認されたい.
)から,式(11)は次のように表される.
tan ∠D′A′O =
2
1−
1+
γ
2
γ
2
(12)
2014/12/12
技術者のための構造力学
σ1 = σr = τ
A’
γ/2
τxy = τ
σ2 = σs = -τ
D
A
γ/2
τxy = τ
D’
z (t)
O
εd/2
x
45 deg.
s
B’
y
B
C
τxy = τ
σ2 = σs = -τ
τxy = τ
r
εd/2
C’
σ1 = σr = τ
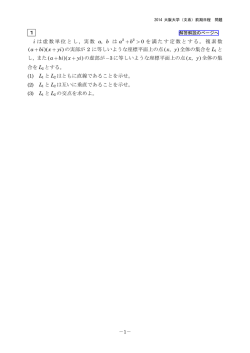
図-2 x,y,z 座標と r,s,t 座標
式(7)と(12)から,次の関係が成立する.
ε=
γ
2
(13)
直交座標系(x-y-z)における,x,y,z 軸方向の直ひずみ εx,εy,εz と直応力 σx,σy,σz の関係はそ
れぞれ次式で表される.(本関係式の誘導等の詳細については別資料「線形座屈理論概説」ないしは一
般的な弾性学や構造力学の教科書 3), 4)を参照されたい.)
ε =
x
1
{σ x −ν (σ y + σ z )}, ε y = 1 {σ y −ν (σ z + σ x )}, ε z = 1 {σ z −ν (σ x + σ y )}
E
E
E
(14)1~3
図-2 に示すように,図-1 における x,y 軸を x-y 平面内で時計回りに 45 度回転させた後の座標軸
をそれぞれ r,s,t 軸とする.等方性材料では弾性係数などの材料特性は座標変換の影響を受けないた
め,式(14)は回転後の r-s-t 座標系においても成立する.即ち,式(14)の右下符号を x→r,y→s,z→t
と読み替えて次式が成立する.
ε =
r
1
{σ r − ν (σ s + σ t )}, ε s = 1 {σ s − ν (σ t + σ r )}, ε t = 1 {σ t − ν (σ r + σ s )}
E
E
E
(15)1~3
図-2 における最大主応力 σ1 の方向の直ひずみ ε は,σr = σ1 =τ,σs =σ2 = -τ,および σt = 0 とおいたと
きの式(15)の第 1 式における εr に他ならない.よって,
ε =ε =
r
1
{τ − ν (− τ + 0)} = τ (1 + ν )
E
E
(16)
式(16)を式(13)に代入すると次式を得る.
γ
2
=
τ
(1 + ν )
(17)
E
γ
2(1 + ν )
(18)
E
式(17)を τ について解くと,次式を得る.
τ =
式(18)と式(3)を照らし合わせれば,次の関係の成立することが明らかである.
G=
E
2(1 + ν )
3
(19)
2014/12/12
技術者のための構造力学
したがって,等方性材料であれば,式(19)の関係によって,弾性係数 E,Poisson 比 ν のみからせん断
弾性係数 G を決定できる.すなわち,等方性材料の弾性範囲内における 3 次元挙動を記述するために必
要な材料特性値は E,ν,G のうちの 2 つで十分である.
【参考文献】
1) 小松定夫:構造解析学Ⅰ,丸善,1982.
2) 崎元達郎:構造力学 第 2 版 上,森北出版,2012.
3) 青木徹彦:土木系大学講義シリーズ 5 構造力学,コロナ社,1986.
4) 吉田総仁:弾塑性力学の基礎,共立出版,1997.
4
© Copyright 2026 Paperzz