Développement de systèmes paramétriques
physiques pour l’analyse d’impact de véhicules
multi-corps flexibles lors d’un accident
et algorithme d’identification
Mémoire
Mohamed El Orche
Maitrise en génie mécanique
Maître ès sciences (M.Sc.)
Québec, Canada
©Mohamed El Orche, 2014
RÉSUME
Dans ce projet de recherche, deux types de modèles physiques paramétriques construits par une
combinaison de ressorts, de masses et de liaisons sont présentés pour étudier l’impact frontal d’un
véhicule de type Dodge 2001.
Également, deux modèles linéaires paramétriques (LMS) à 5 degrés de liberté sont introduits et vérifiés,
en référence aux travaux de recherche de Mr Javad Marzbanrad et de Mr Mostafa Pahlavani.
Les ressorts et les amortisseurs utilisés sont déterminés via une optimisation des décélérations, tenant
compte des résultats numériques par éléments finis et ceux provenant de l’expérience. Plus précisément,
ces paramètres sont identifiés par une minimisation de l’erreur moyenne quadratique entre les résultats
des simulations et les tests expérimentaux lors de l’impact frontal.
iii
ABSTRACT
In this study, two types of physical parametric models built using a combination of springs, masses and
links are introduced for a vehicle frontal crash study.
In addition, two 5DOF linear parametric models (LMS) are proposed and checked, based on the previous
investigation made by Mr Javad Marzbanrad and Mostafa Pahlavani. The values of spring and dampers
have been determined using an optimisation of deceleration, considering the numerical results from finite
element and experimental results. These determined values have been calculated on the basis of
minimisation of the root mean square of the difference between simulated and experimental results as
occurred for occupants in the frontal crash.
v
Table des matières
RÉSUME........................................................................................................................................................ iii
ABSTRACT...................................................................................................................................................... v
Table des matières ...................................................................................................................................... vii
LISTE DES TABLEAUX .................................................................................................................................... ix
LISTE DES FIGURES ....................................................................................................................................... xi
REMERCIEMENTS ........................................................................................................................................xiii
1.
2.
Introduction à l’impact frontal.............................................................................................................. 1
1.1.
Contexte ........................................................................................................................................ 2
1.2.
Objectif du travail de recherche ................................................................................................... 3
1.3.
Revue de littérature ...................................................................................................................... 4
1.4.
Techniques de modélisation ......................................................................................................... 5
1.4.1.
Modèle LMS .......................................................................................................................... 6
1.4.2.
Modèle Eléments finis........................................................................................................... 8
1.4.3.
Systèmes dynamiques multi-corps (SDM) ............................................................................ 9
1.4.4.
Modèles hybrides................................................................................................................ 10
1.5.
Méthodes d’analyse et indicateurs............................................................................................. 11
1.6.
Description des logiciels utilisés ................................................................................................. 12
1.6.1.
MapleSim 6 et Maple 16 ..................................................................................................... 12
1.6.2.
Le logiciel Matlab ................................................................................................................ 14
1.6.3.
LS-DYNA............................................................................................................................... 15
Description et analyse des modèles linéaires ..................................................................................... 17
2.1.
Modèles linéaires d’impact voiture / barrière ............................................................................ 18
2.1.1.
Modèle 1 : 5 masses en série avec 5 degrés de liberté (5 ddl) ........................................... 19
2.1.2.
Modèle2 : 5 masses en parallèle avec 8ddl ........................................................................ 22
2.1.3.
Modèle3 : 5 masses en parallèle avec 5ddl ........................................................................ 25
2.2.
Conclusion ................................................................................................................................... 26
vii
3.
Modèle non linéaire sous LS DYNA ..................................................................................................... 27
3.1.
4.
Modèle LS DYNA ......................................................................................................................... 28
Fonctionnement de MapleSim et présentation des nouveaux modèles physiques........................... 34
4.1.
Introduction ................................................................................................................................ 35
4.2.
Tutoriel : Modélisation d’un mécanisme bielle – coulisseau ...................................................... 36
4.3.
Modèles physiques paramétriques sous MapleSim ................................................................... 41
4.3.1.
4.3.1.1.
Présentation ................................................................................................................ 44
4.3.1.2.
Programme MATLAB ................................................................................................... 48
4.3.1.3.
Matrices du modèle et courbes de simulation ........................................................... 49
4.3.2.
5.
Le modèle masses du véhicule............................................................................................ 44
Modèle Bielles-masse ......................................................................................................... 53
4.3.2.1.
Présentation ................................................................................................................ 53
4.3.2.2.
Programme MATLAB ................................................................................................... 55
4.3.2.3.
Matrices du modèle et courbes de simulation ........................................................... 57
Conclusion et perspectives ................................................................................................................. 61
ANNEXE A .................................................................................................................................................... 62
A.1
Méthode de représentation par variables d’état ....................................................................... 62
A.2
Méthode Newmark ..................................................................................................................... 63
ANNEXE B .................................................................................................................................................... 64
B.1
Programme MATLAB Optim_5ddl.m .......................................................................................... 64
B.2
Programme MATLAB Optim_5LH.m ........................................................................................... 66
ANNEXE C .................................................................................................................................................... 69
C.1
Programme MATLAB Modele_masses.m ................................................................................... 69
C.2
Programme MATLAB Modele_bielles.m ..................................................................................... 73
BIBLIOGRAPHIE ........................................................................................................................................... 77
viii
LISTE DES TABLEAUX
1.1
2.1
2.2
2.3
2.4
3.1
3.2
3.3
3.4
3.5
4.1
4.2
4.3
4.4
Différences entre les algorithmes d’optimisation ............................................................................. 15
Valeurs de masses utilisés dans le modèle 5 masses en série ........................................................... 20
Valeurs de raideurs et amortissements pour le modèle en série ....................................................... 21
Masses du modèle 5 masses en parallèle .......................................................................................... 23
Valeurs initiales et finales des raideurs et amortissements pour le modèle en parallèle .................. 24
Caractéristiques matériau du pare chocs........................................................................................... 28
Matériaux utilisés pour le radiateur .................................................................................................. 30
Propriétés du matériau utilisé pour le capot...................................................................................... 30
Types d’éléments disponibles pour une section coque ..................................................................... 31
Propriétés de soudure entre matériaux .............................................................................................. 31
Valeurs maximales et minimales d’angles, vitesses et accélérations angulaires .............................. 40
Valeurs initiales des raideurs et amortissements .............................................................................. 45
Valeurs des longueurs initiales ......................................................................................................... 47
Valeurs optimales des paramètres..................................................................................................... 56
ix
LISTE DES FIGURES
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
1.10
2.1
2.2
2.3
2.4
2.5
2.6
2.7
2.8
3.1
3.2
3.3
3.4
3.5
3.6
4.1
4.2
4.3
4.4
4.5
4.6
4.7
4.8
Modèle LMSde Kamal ....................................................................................................................... 6
Modèle Magee .................................................................................................................................... 7
Modèle LMS 2ddl ............................................................................................................................... 7
Modèles 5 masses en série et en parallèle........................................................................................... 8
Impact frontal (LS DYNA) ................................................................................................................. 8
1er modèle SDM .................................................................................................................................. 9
Crash test latéral ............................................................................................................................... 10
Mécanisme et réseau vectoriel du modèle bielle coulisseau............................................................. 13
Solveur d’optimisation du logiciel Matlab ....................................................................................... 14
Fonctionnement de LS DYNA ......................................................................................................... 15
Algorithme d’optimisation................................................................................................................ 19
Modèle 5 masses en série ................................................................................................................. 19
Décélérations numériques et expérimentales de la masse 5 ............................................................. 21
Énergie cinétique de la masse 5 ........................................................................................................ 22
Modèle 5 masses en parallèle ........................................................................................................... 22
Décélérations numériques et expérimentales de la masse 5 ............................................................. 24
Modèle 5 masses en parallèle 5ddl ................................................................................................... 25
Décélérations numériques et expérimentales de la masse 5 ............................................................. 26
Modèle LS DYNA DODGE (1333Kg) ............................................................................................ 28
Loi de comportement élasto-plastique .............................................................................................. 29
Comparaison des modèles expérimentaux et éléments finis............................................................. 32
Déplacements suivant x (1ère phase) ................................................................................................. 33
Déplacements suivant x (2éme phase) ................................................................................................ 33
Déplacements suivant x (3ème phase) ................................................................................................ 33
Simplification du modèle continu ..................................................................................................... 35
Dynamique et principe des réseaux vectoriels .................................................................................. 35
Modèle MapleSim du système bielle-coulisseau .............................................................................. 36
Position initiale à T = 0s ................................................................................................................... 37
Position à T = 2.3s ............................................................................................................................ 37
Position à T=5.15s ............................................................................................................................ 37
Position àT=9.62s ............................................................................................................................. 37
Trajectoire des deux centres de masse .............................................................................................. 37
4.9
4.10
4.11
4.12
4.13
4.14
4.15
Choix des coordonnées relatives q1 et q2 .......................................................................................... 38
Résultats de simulation ..................................................................................................................... 40
Méthode paramétrique physique....................................................................................................... 41
Processus du calcul ........................................................................................................................... 42
Propriétés des liaisons prismatiques et rotules ................................................................................. 44
1er modèle Maplesim du véhicule ..................................................................................................... 45
Répartition des raideurs et amortissements ...................................................................................... 46
xi
4.16
4.17
4.18
4.19
4.20
4.21
4.22
4.23
4.24
4.25
4.26
4.27
4.28
4.29
4.30
4.31
4.32
4.33
xii
Simulation du Modèle (instants 0.04s et 0.134s) .............................................................................. 46
Bloc avant d’un modèle de véhicule Dodge 2001 ............................................................................ 47
Structure du programme Matlab Modele_masses.m ........................................................................ 48
Paramètres finaux obtenus ................................................................................................................ 49
Matrices du mécanisme .................................................................................................................... 50
Simulation du modèle optimise (instants 0.058 et 0.15s) ................................................................. 50
Courbes d’accélérations numérique et expérimentale ...................................................................... 51
Vitesses expérimentale et numérique ............................................................................................... 51
Accélérations expérimentale et numérique ....................................................................................... 52
Comparaison des vitesses et accélérations........................................................................................ 52
Assemblage des 3 bielles par des rotules .......................................................................................... 53
Modèle final bielles-masse ............................................................................................................... 53
Répartition des raideurs et amortissements ...................................................................................... 54
Structure du programme Modele_bielles.m...................................................................................... 55
Matrices du modèle bielles-masse .................................................................................................... 57
Rendu 3D de la simulation du modèle optimisé ............................................................................... 57
Accélération du modèle bielles-masse.............................................................................................. 58
Vitesse du modèle bielles-masse ...................................................................................................... 58
REMERCIEMENTS
Ce travail de recherche a été réalisé au sein du département de génie mécanique de l’Université Laval. Je
le dédie aux membres de ma famille au Maroc et en Europe.
Il s’inscrit dans le cadre des projets de dynamique des systèmes multi-corps, sous la direction de Mr Marc
J. Richard que je tiens à remercier vivement pour son précieux soutien, sa patience et son assistance
durant ces années de maitrise, pleine de bonne humeur et de passion scientifique.
Je remercie les personnes qui m’ont conseillé, en particulier Mr Gakwaya, Professeur chercheur à
l’Université Laval, Mr Daoud Ait Kadi, Mr Yves Saint Amant et Mr Louis Gagnon pour leur disponibilité
et leur rigueur scientifique qui m’a permis de mener à bien ce projet.
Mes remerciements s’adressent également à Mme Claire Deschenes, directrice des programmes de 2e et 3e
cycles du département de génie mécanique de l’Université Laval pour son suivi, et toutes les personnes du
département qui ont contribué dans la réussite de ce projet de recherche.
Finalement, merci aux professeurs Mr Mohamed Bouazara, Mr Benoit Levesque et Mr Clément Gosselin
pour avoir accepté de lire et corriger ce mémoire de maîtrise.
xiii
Chapitre 1
1. Introduction à l’impact frontal
Ce chapitre présente le contexte de ce projet et ses objectifs. Les quatre techniques de modélisation de
l’impact frontal sont de type : paramétriques masse-ressort, éléments finis, systèmes dynamiques
multi-corps et hybrides. Elles sont explicitées pour clarifier la problématique de l’analyse dynamique
d’impact. Nous discuterons ensuite des méthodes d’analyses permettant d’exploiter les résultats.
Enfin, une présentation des logiciels utilisés, MAPLESIM 6, MAPLE16, MATLAB et LS DYNA sera
donnée.
1
1.1. Contexte
Plusieurs laboratoires de recherches s’intéressent à la problématique de la sécurité et protection des
passagers appelé « Crash-worthiness ». Elle peut être définie par : « La capacité du véhicule à
protéger ses occupants pendant un impact frontal, latéral ou arrière».
Malgré les efforts déployés dans l’analyse du phénomène d’impact, ses conséquences directes sur les
passagers et l’amélioration structurelle du véhicule, le nombre de blessés (tout type de blessures) n’a
pas beaucoup diminué. Selon l’organisation mondiale de la santé, le nombre de morts dans les
accidents de route en 2010 avoisinait les 1.24 millions [1] (tout impact). L’organisation NHTSA «
National Highway Trafic Safety Administration », avance dans son rapport de 2007 [2], un chiffre de
5300 blessés dans les impacts frontaux.
Le gouvernement du Canada (Road Safety Strategy Vision 2010), sous l’égide du CCMTA « Canadian
Council of Motor Transport Administrators »en partenariat avec les investisseurs et les organisations
de protection des passagers, ont obtenu en 2007 [3] une réduction de 21% du nombre de blessés. Ce
résultat a encouragé l’établissement d’une stratégie et d’une vision différente pour l’année 2015, dans
laquelle chaque province fixera ses objectifs en investissant dans la communication, la conscience du
public utilisateur, la coopération et la recherche.
Les méthodes habituelles permettant d’étudier la protection des passagers consistent à modéliser les
véhicules sous forme de milieu continu, en utilisant des logiciels de CAO tels que Abaqus et LS-Dyna,
et de comparer les résultats obtenus aux résultats expérimentaux du crash test.
Parmi les méthodes numériques utilisées pour l’analyse d’impact, figure les éléments finis non
linéaires. Son application coûte cher du fait de la complexité structurelle des véhicules, contenant
différents types de formes et matériaux, soumis à de grandes déformations élastiques et plastiques, à
de grandes contraintes et également soumis à des forces de contact et de frottements.
Pour information, un crash test nécessite 36 heures de préparation et un mannequin robot d’une valeur
de 30000$.
Le temps standard d’un impact est de 100 ms, et sa simulation peut durer jusqu’à une demi-journée.
Tenant compte de ces détails, et de la complexité des structures soumises aux grandes sollicitations, il
devient primordial d’améliorer la performance du calcul numérique. D’où l’intérêt d’innover dans les
moyens disponibles d’analyse d’impact tels que la mise en place de modèles simples et précis, pouvant
répondre à la question suivante : « Est-il possible qu’une modélisation physique simple de véhicule,
moins cher et plus précis puisse répondre aux objectifs de protection et de sécurité des occupants sans
faire appel aux calculs robustes d’éléments finis ? ».
2
1.2. Objectif du travail de recherche
Dans ce travail de recherche, nous proposons un recensement de la dynamique de l’impact frontal au
sens physique et également une démarche d’optimisation des composantes de la structure du véhicule.
Plus précisément, des modèles physiques discrets de véhicules sont décrits, simulés puis comparés à
leurs équivalents au sens milieu continu sur LS-DYNA. Ils sont comparés ensuite aux modèles
expérimentales.
Les indicateurs les plus évalués dans la dynamique d’un impact sont : HIC « High injury criterion »,
qui détermine les possibilités de survie par rapport à un certain seuil critique et le RMS « Root mean
square», qui évalue l’erreur moyenne quadratique des vitesses et accélérations expérimentales et
numériques.
Tout d’abord, nous exposons une revue de la littérature des modèles physiques d’impact, les modèles
numériques actuels pour cette dynamique rapide, ainsi que les méthodes d’investigation possibles.
Il s’en suivra une présentation rapide des logiciels de simulation et de calcul utilisés dans ce projet.
Puis, les modèles linéaires et non linéaires pour l’automobile sont décrits et leur simulation est
effectuée et analysée.
Pour approcher ces modèles des résultats expérimentaux de crashs tests, nous exploiterons la valeur
RMS pour déterminer les paramètres du véhicule en utilisant le solveur d’optimisation de Matlab qui
sera utilisé comme gestionnaire de l’ensemble des calculs.
Afin de montrer l’intérêt des modèles physiques, nous les comparerons à d’autres de type milieu
continu conçus et analysés sur LS-Dyna. Finalement, une comparaison et critiques seront établies entre
les divers modèles et les possibilités de leur validation.
3
1.3. Revue de littérature
Le domaine de la protection des passagers de véhicules contre les blessures, vise la performance de la
structure à supporter un impact donné. Elle concerne non seulement les voitures mais également les
avions, les bateaux et les trains.
Le premier système d’investigation de crash a été appliqué entre 1809 et 1879 par Mr Thomas
Andrews, aux principaux essieux de train [4]. Pour améliorer la structure d’un véhicule, il est
indispensable de comprendre les facteurs affectant les phases de l’impact et ses caractéristiques.
Généralement, les collisions se produisent de manière aléatoire pouvant être de type véhicule /
véhicule ou véhicule/structure, suivant diverses directions et vitesses [5]. Ces structures peuvent être
de type barrière rigide, arbre, poteau, etc…ce qui pourrait générer de forts chargements dûs à la
rigidité de la structure, ne pouvant pas absorber l’énergie de l’impact.
Selon Galganski [6], les problèmes de protection des occupants lors d’un crash peuvent être
caractérisés principalement par :
1. Le déplacement et les énergies : La longueur de la structure frontale a été réduite par les
moyens modernes de design. En même temps, il est nécessaire d’absorber l’énergie de
l’impact et de minimiser l’intrusion de la structure percutée dans le véhicule.
2. L’impulsion de l’impact: L’indicateur HIC, « High injury criterion» permet de mesurer les
dommages que le cerveau humain subit pendant l’impulsion. Il doit être inférieur à un certain
seuil critique de survie [7].
3. La position de l’impact: La structure doit être capable d’atténuer les blessures dans plusieurs
positions tels que : impact frontal, latéral, arrière ou le retournement.
Dans ce travail de recherche, l’étude sera restreinte à l’impact frontal qui implique une barrière rigide
et un véhicule donné.
En effet, celui-ci se définit par trois phases :
•
1ère phase : Le véhicule impacte la barrière et reçoit une impulsion directe qui se traduit par
une intrusion sur la face frontale et une déformation due à la dissipation de l’énergie.
•
2éme phase : L’occupant bouge vers la limite frontale de l’intérieur s’il n’est pas sécurisé. Dans
le cas contraire, il interagit avec les moyens de sécurité tels que la ceinture ou l’airbag. La
déformation atteint l’intérieur du véhicule et produit une compression de l’occupant.
•
3éme phase : Le restant de l’énergie est dissipé en raison du ralentissement de l’occupant et du
véhicule.
Les blessures peuvent se produire durant la deuxième phase, si la charge transmise lors de l’impact est
supérieure aux limites de sécurité. Normalement, une structure optimale devrait assurer une dissipation
de
l’énergie
cinétique
de
façon
rapide
afin
de
limiter
les
dommages.
4
Les mesures de sécurité telles que : l’utilisation de matériaux absorbeurs d’énergie dans l’enveloppe
intérieure, la ceinture de sécurité et l’airbag sont très importants dans la réduction des blessures
causées par l’interaction entre l’occupant et l’intérieur du véhicule.
D’un point de vue législatif, les constructeurs automobiles sont obligés de se conformer à certains
règlements gouvernementaux afin d’assurer le minimum obligatoire de sécurité aux clients.
Pour les impacts frontaux, le design de véhicules est soumis à la règlementation FMVSS 208 aux
États Unis, CMVSS 208 au Canada, et ECE R-12 en Europe [8,9].
En principe, structurellement le véhicule doit remplir les deux conditions suivantes :
•
Absorber l’énergie d’impact par des déformations plastiques contrôlées, de façon que le
système de sécurité s’occupe de la proportion restant de cette énergie.
•
Préserver au moins un minimum de place de survie, pour maintenir un niveau très bas de
blessures.
1.4. Techniques de modélisation
Les normes pour un impact frontal de type barre rigide exigent la réalisation de tests sous une vitesse
de 48.28 km/h (30mph) pour plusieurs angles 0, +30 et -30 degrés selon l'organisation FMVSS 208
[10] et à 56.33 km/h (35mph) à 0degrés selon le NCAP (« New Car Assesment Program ») [11].
Ces tests sont onéreux, d’où l’intérêt de développer des modèles simples et fiables, pouvant prédire le
comportement d’un véhicule soumis à un impact frontal.
Les techniques de modélisation actuelles, s’inscrivant dans cette optique, sont :
•
•
•
•
Les Modèles paramétriques de type masse –ressort (LMS, « Lumped Mass Spring »)
Les Modèles Éléments finis.
Les Systèmes dynamiques multi-corps.
Les Modèles hybrides.
Nous présentons chacun de ces modèles dans la section suivante.
5
1.4.1. Modèle LMS
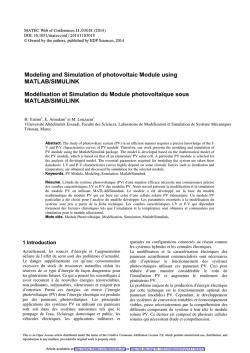
Le premier modèle simplifié a été développé par Dr Kamal[12] en 1970. Il a simulé un impact frontal
complet d’un véhicule avec une barrière rigide (Figure 1.1).Le modèle comporte 3 masses et 8
ressorts, de valeurs difficilement identifiables de manière empirique. Ceux-ci sont convertis ensuite en
valeurs équivalentes pour le design structurel du véhicule.
Figure 1.1 : Modèle LMS de Kamal [12]
6
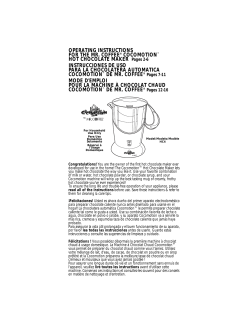
En 1988, Dr Magee [13] valide un modèle LMS montré à la figure 1.2, comportant non seulement
des ressorts (Figure 1.2) mais amortisseurs également pour prédire un crash frontal à 56 km/h dans
lesquelles les valeurs inconnues ont été réglées progressivement pour correspondre aux valeurs
expérimentales. La courbe montre la cohérence des résultats du modèle avec celles provenant de
résultats de l’expérience physique.
Figure 1.2 : Modèle Magee [13]
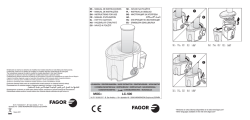
Dans cette dynamique, en 2011, Gabriela K. De Francisci [14] de l’université de Californie présente
un article dans lequel un modèle à 2 degrés de liberté représenté sur la figure 1.3, s’est avéré capable
de simuler l’impact véhicule / barrière de manière cohérente.
Figure 1.3 : Modèle LMS 2ddl [14]
Également, deux modèles de 5 masses [15], en série et parallèle ont été réalisés par J. Marzbanrad et
M.Pahlavani [15], dans lesquelles ressorts et amortisseurs sont déterminés via une optimisation par
rapport aux résultats physiques des accélérations montrés en figure 1.4.
7
Figure 1.4 : Modèles 5 masses en série et
en parallèle [15]
1.4.2. Modèle Eléments finis
Il existe plusieurs logiciels de calcul, pouvant modéliser un impact frontal tels que : PAM-Crash [16],
LS-Dyna [17] et Abaqus [18]. Le calcul s’effectue via des algorithmes implicites / explicites de la
dynamique rapide (non linéaire) et utilisent plusieurs types d’éléments finis (Figure 1.5) non linéaires :
barre, poutre, surface, etc...
Ford Taurus
Figure 1.5 : Impact frontal (LS-Dyna)
Les équations de cette dynamique sont :
[ M ]{ X } + [C ]{ X } + [ K ]{ X } =
{F ext }
8
(1.1)
Tels que les matrices [M], [C] et [K] représentent successivement la masse, l’amortissement et la
{ }{ }
, X , { X } sont les accélérations,
rigidité; F ext est le vecteur des forces externes nodales, et X
vitesses et déplacements aux nœuds.
Ces logiciels peuvent également effectuer la simulation du passager, l’évaluation et l’amélioration des
bords de routes ainsi que l’amélioration structurelle des véhicules pour la sécurité des piétons. Malgré
la robustesse de ces solveurs non linéaires, la complexité des processus de calcul s’avère un obstacle
en cas d’utilisation de modèles complexes.
1.4.3. Systèmes dynamiques multi-corps (SDM)
Les systèmes multi-corps (SDM) sont composés de plusieurs corps flexibles interconnectés par des
articulations et joints, disposant davantage de degrés de liberté contrairement aux modèles rigides
LMS.
Les SDM offrent des résultats très pertinents en termes de cinématique et cinétique de l’interaction
entre les corps. Ce qui est très intéressant pour l’analyse de l’interaction corps humain avec l’intérieur
du véhicule.
Dans son travail, Dr McHeny [19] a utilisé un modèle SDM dans lequel un corps est attaché au siège
de la voiture dans l’étude d’une collision frontale. Ce corps humain a été modélisé par 4 corps rigides
connectés par des joints représentés sur la figure 1.6.
Figure 1.6: 1er modèle SDM
9
1.4.4. Modèles hybrides
Les modèles hybrides combinent des modèles d’éléments finis pour la structure du véhicule et des
SDM pour l’analyse du mannequin passager. Le crash test latéral présenté ci-dessous utilise à la fois
LSDYNA et MADYMO, pour la description du SDM montré à la figure 1.7.
Figure 1.7: Crash test
latéral [20]
Malgré les résultats convaincants de cette approche, il y a eu plusieurs critiques concernant le manque
de précision vis-à-vis du comportement du modèle SDM du mannequin, supposé représenter l’humain.
Ce qui a donné lieu aux recherches concernant la modélisation éléments finis du corps humain
(biomécanique), qui reste pourtant compliqués du fait du nombre important d’éléments qui modélisent
l’homme (par exemple : un cerveau humain peut être modélisé par 300000 éléments [21]).
Cependant, les industries automobiles ont conçus leurs propres modèles humains par élément finis, tel
que Toyota, qui a développé le Total Human Model for Safety (THUMS) [22].
10
1.5. Méthodes d’analyse et indicateurs
Les indicateurs les plus utilisés sont :
•
High Injury Risk (HIC) : Permet de mesurer la gravité de l’impact sur l’occupant. Il se définit
par l’équation suivante :
=
HIC [
t2
1
a (t )dt ]2.5 (t2 − t1 )
∫
t
t2 − t1 1
(1.2)
où a(t) est l’accélération du centre de gravité du mannequin (tête) pendant une durée de 15 ms.
L’AIS (« Abbreviated Injury Scale ») créé par l’organisation de la sécurité et l’union européenne des
routes (ERF) [24] fournit un standard de correspondances des valeurs de HIC aux dommages
possibles.
La déformation du véhicule se calcule par la déflexion maximale ( xc ) max du devant du véhicule
[25,26] par rapport à sa longueur.
µd =
( xc ) max
, tel que µd ≤ 0.7
L
(1.3)
En cas de dépassement de cette valeur, l’intrusion touche le compartiment du conducteur et met ainsi
sa survie en danger.
•
L’erreur moyenne quadratique permet de mesurer les écarts de prédiction des valeurs
d’accélérations du véhicule aux valeurs réelles optimales.
Elle se définit par :
RMS =
( av − aopt ) 2
(1.4)
n
Dans cette étude, l’indicateur RMS utilisé est égale à :
RMS =
( eai ) 2
n
tel que eai =
a i sim − a i exp
n
∑a
i =1
i
(1.5)
exp
i
i
Tel que : a sim , a exp et n sont successivement les valeurs d’accélération de simulation, les valeurs
expérimentales et le nombre de sorties (qui varie en fonction de la durée de simulation).
Également, afin de rester cohérent avec les travaux précédents ([15] et [23]), l’accélération du centre
de gravité du mannequin (assimilé à une masse) a été choisie comme résultat de sortie des simulations.
11
1.6. Description des logiciels utilisés
1.6.1. MapleSim 6 et Maple 16
MapleSim6 est un logiciel de modélisation et simulation multi-domaines. Il permet de construire des
modèles dynamiques, tout en intégrant des composants provenant de plusieurs domaines : mécanique,
hydraulique, thermique et électrique. Il offre à la fois un calcul symbolique et numérique.
Ces avantages sont :
•
•
Interactions avec d'autres solveurs tel que : Maple 16 afin de générer les équations
symboliques du modèle et de commander son comportement dynamique ou Matlab pour sa
performance numérique.
Exploitation de la méthode de résolution : « Réseaux vectoriels » (chapitre 14 du cours de
dynamique des solides [27]).
La méthode des réseaux vectoriels est une technique de modélisation dynamique des systèmes
mécaniques qui combine la dynamique variationnelle avec certains concepts de la théorie des graphes
[27].
Cette méthode permet de générer un modèle mathématique général pour la simulation dynamique de
systèmes tridimensionnels de corps rigides, inter-reliés par des joints quelconques. Étant donné un
système mécanique, la méthode des réseaux vectoriels permet de le représenter par un ensemble de
nœuds et d’arcs formant un réseau vectoriel. Les nœuds représentent des points spécifiques du système
mécanique et les arcs représentent les éléments d’interconnexion de ces nœuds entre eux.
La figure 1.8 présente le réseau vectoriel d’un mécanisme bielle-coulisseau, dans lequel les nœuds
représentent les repères fixés sur les solides et les arcs (ou vecteurs) représentent des composantes du
système.
12
Figure 1.8: Mécanisme et réseau vectoriel du
modèle bielle coulisseau
Les équations de mouvement du système sont (chap. 14 [27]) :
Mˆ
φq
φqT q Q total
=
0 λ Λ
(1.6)
Tel que :
•
•
Mˆ : Matrice masse ( n q × n q ) symétrique
φq : Matrice Jacobéenne nc × n q de contraintes
•
Q total = Q A − Q K − Q cons (les quantités Q total , Q A , Q K et
•
•
généralisée totale, force appliquée, force cinétique et force de contrainte)
λ : Multiplicateur de Lagrange.
Λ : Contrainte cinématique en accélération à déterminer.
Q cons sont respectivement la force
Les équations symboliques sont générées ensuite par MAPLE16. Ci-dessous un exemple de la matrice
masse pour le mécanisme de la figure 1.8:
13
1.6.2. Le logiciel Matlab
Le logiciel Matlab est un outil puissant, matriciel incluant d'un ensemble de librairies, qui permettent
de répondre aux problèmes numériques d'ingénierie. Il est utilisé dans ce projet comme gestionnaire de
l’ensemble de calculs qui feront appel à une librairie très performante d’optimisation par algorithmes
génétiques (Figure 1.9).
Figure1.9 : Solveur d’optimisation du logiciel Matlab
Un algorithme génétique est une méthode de résolution d’un problème d’optimisation (Tableau
1.1)sans contrainte et avec contrainte, basée sur la selection naturelle (évolution biologique). Dans
chaque étape de calcul, cet algorithme choisit au hasard une population à partir des données initiales et
produit une nouvelle génération. Après plusieurs itérations, la population évolue vers un optimimum.
Cette méthode permet de résoudre une multitude de problèmes d’optimisation, y compris les situations
où la fonction objective est discontinue, non différentiable, stochastique ou non linéaire.
Générallement, l’algorithme génétique dispose de trois régles à chaque étape pour créer une nouvelle
génération à partir de l’actuelle génération :
•
•
•
14
Sélection : permet de selectionner des individus ‘Parents’. Cela contribue dans la population
de la génération suivante.
Mélange : combine deux parents pour constituer des enfants pour la génération suivante.
Mutation: applique des changements aléatoires aux individus parents pour la génération
suivante.
Un algorithme génétique se distingue d’une procédure standard d’optimisation de 2 manières, comme
expliqué au tableau ci-dessous.
Algorithme d’optimisation
Standard
Algorithme
génétique
Genérer un point seul pour chaque
iteration. La séquence des points
approche la solution optimale.
Genérer une population de points a chaque
étape. Le meilleur point dans la population
approche la solution optimale.
Sélectionner le prochain point dans la
sequence par un calcul déterministe.
Sélectionner une future population par un
calcul, utilisant un generateur aléatoire de
nombres.
Tableau 1.1 : Différences entre les algorithmes d’optimisation
1.6.3. LS-DYNA
Le logiciel LS DYNA est un solveur éléments finis capable de simuler plusieurs problèmes
complexes. Il est utilisé dans l'industrie automobile, aérospatial, militaire, bio-ingénierie, de la
construction et la production industrielle. Le code est basé sur des éléments finis non linéaires,
utilisant une intégration temporelle de type explicite.
Les non linéarités traitées peuvent être géométriques, matérielles ou de frontières (contact), etc...
Dans le cas de crash, celles-ci sont principalement : déformation du châssis, déploiement de l'airbag,
étirement de la ceinture de sécurité.
Quelques exemples d’application de LSDYNA : Interaction fluide structure, biomécanique,
microtechniques, et mise en forme, thermique. Son fonctionnement est illustré dans la figure 1.10 cidessous :
Figure 1.10 : Fonctionnement de LS DYNA
15
Les calculs avec le solveur DYNA se font par le biais d'un fichier ASCII : Keyword file. Celui-ci
est composé de mots clés nécessaires à la résolution du problème donné. La mise en donnée peut se
faire avec un préprocesseur : I-DEAS, Hypermesh, FEMB, LS-TAURUS,…
Une fois l’analyse lancée, le post traitement des fichiers sortis sera effectué avec LS PREPOST, qui
recueille les résultats par utilisations combinées de fichiers binaires, et fichiers textes (ASCII).
16
Chapitre 2
2. Description et analyse des modèles linéaires
Ce chapitre présente une description des modèles linéaires utilisés dans la simulation d’impact frontal.
Il décrit également les processus de calcul utilisés pour générer les valeurs optimales des paramètres
permettant d’obtenir des résultats concordantavec l’expérience.
17
2.1. Modèles linéaires d’impact voiture / barrière
Cette section présente deux modèles linéaires, contenant des amortisseurs et des ressorts linéaires, qui
permettent de simuler un crash frontal. Les raideurs et amortissements sont déterminés analytiquement
via un algorithme d’optimisation, tenant compte des résultats expérimentaux.
La méthode analytique contient deux étapes :
1. Écriture des équations (1.1) de mouvement sous la forme matricielle
M {
xi } + C { xi } + k { xi } =
{0}
2. Résolution par méthode Newmark ou Représentation par variables d’état (annexe A).
Les valeurs de sortie sont intégrées dans un programme d’optimisation utilisant les algorithmes
génétiques (AG) représenté sur la figure 2.1.
La fonction coût vise à minimiser l’écart entre les résultats de simulation et les résultats de
l’expérience en termes de vitesses ou décélérations, c’est-à-dire, minimiser la fonction Z.
Z = RMS ( eai / mean(abs(aexp )))
(2.1)
Tel que :
•
•
ea=i ai − aexp ; la différence entre les valeurs de simulation et celles provenant de
l’expérience.
RMS(a)= mean [ a ]2 ; a est le vecteur d’accélération résultat de la simulation sur
MapleSim.
18
Figure 2.1 : Algorithme d’optimisation
2.1.1. Modèle 1 : 5 masses en série avec 5 degrés de liberté (5 ddl)
Il s’agit de 5 masses montrées en figure 2.2 connectées en série par des ressorts et amortisseurs, avec
raideurs et amortissements à déterminer. k1 , k2 , k3 , k4 , k5 , C1 , C2 , C3 , C4 , C5 . Il y a 5 degrés de
liberté.
Figure 2.2 : Modèle 5 masses en série
19
Les matrices [M], [C] et [K] s’écrivent comme suit :
0
0
0
m1 0 0 0 0
c1 + c2 −c2
0 m2 0 0 0
−c 2 c 2 + c3 −c3
0
0
=
[ M ] =
−c3 c3 + c 4 −c 4
0 0 m3 0 0 , [C ] 0
0 ,
−c4 c4 + c5 −c5
0
0 0 0 m4 0
0
0 0 0 0 m5
0
−c5 c5
0
0
0
0
0
k1 + k 2 − k 2
−k 2 k 2 + k 3 −k 3
0
0
−k 3 k 3 + k 4 −k 4
0
[K] = 0
− k 4 k 4 + k 5 − k 5
0
0
−k 5
0
0
k 5
0
Les équations à résoudre sont :
M {
xi } + C { xi } + k { xi } =
{0}
(2.2)
Tenant compte des résultats de l’article [15], les données choisies (valeurs fixes, bornes initiales et
supérieures) du problème en termes de masses, raideurs, amortissements sont rassemblés dans le
tableau 2.1.
Valeurs initiales
Raideurs (N/m)
k1 = 350 000
k2 = 350 000
k3 = 110 000
k4 = 1.0
k5 = 150 000
Amortissements (N.S/m)
C1 = 9000 000
C2 = 9000 000
C3 = 0.12
Tableau 2.1 : Valeurs de masses
C4 = 9000
C5 = 500
Le programme Matlab ‘Optim_5ddl.m’(annexe B1)intègre ces valeurs dans le processus
d’identification des paramètres ki et Ci , minimisant l’erreur moyenne quadratique de l’accélération de
la masse m5 .
20
Pour une vitesse initiale de 14 m/s et un RMS de 0.52, nous obtenons les valeurs du tableau 2.2 pour
les paramètres :
Amortissements
(N.S/m)
C1
C2
19919388.21 19917598.56
Raideurs (N/m)
C3
C4
C5
0.18304
19777.1246
810.8301
k1
k2
k3
k4
k5
1341925.08
1333105.21
1117990.69
1.91805
572047.24
Tableau 2.2 : Valeurs de raideurs et amortissements
La courbe ci-dessous (Figure 2.3) présente les décélérations de la masse m5 suite à l’impact réalisé à
14 m/s. La simulation montre qu’entre 0 et 0.05s, l’accélération baisse rapidement jusqu’à -37.97g à
0.07s et augmente avec la même tendance jusqu’à devenir nulle à 0.09s.
De
0.09s
à
0.15s,
elle
tend
vers
une
valeur
stable
autour
de
0m/s.
L’écart entre les valeurs expérimentales et numériques atteint un maximum -11(g) entre 0 et 0.09s, une
valeur de 6(g) à0.085s et devient négligeable vers la fin de la simulation.
Figure 2.3 : Décélérations numériques et expérimentales
de la masse 5
21
L’impact produit un retour d’énergie cinétique (Figure 2.4) très important vers la masse 5, 7840 Joule
à t=0s.
Pendant 17 premières millièmes de secondes, elle est invariante puis elle décroît rapidement jusqu’à
1686 Joule à t=0.05s. Elle se dissipe complétement après 0.07s.
Figure 2.4 : Énergie cinétique de la masse 5
2.1.2. Modèle2 : 5 masses en parallèle avec 8ddl
Le modèle est composé de 5 masses (Figure 2.5) connectées en parallèle, avec raideurs et
amortissements à déterminer : k1 , k2 , k3 , k4 , k5 , k6 , k7 , k8 , k9 , C4 , C5 , C6 , C7 , C8 , C9 .
Contrairement au cas précédent, 3 degrés de liberté ont été ajoutés dans ce modèle pour les masses m1,
m2 et m3. Le total est de 8 degrés de libertés (Figure 2.5).
Figure 2.5 : Modèle 5 masses en
parallèle
22
Les matrices du système d’équations dynamiques pour ce système sont :
m1 0 0
0 m
0
1
0 0 m2
0 0 0
[ M ] =
0 0 0
0 0 0
0 0 0
0 0 0
0
0
0
0
0
0
0
0
0
m2
0
0
0
0
m3
0
0
0
0
m3
0
0
0
0
0
0
0
0
0
0
m4
0
0
0
0
0
0
0
0
m5
c4
0
0
0
[C ] = 0
0
−c4
0
0
0
0
0
0
−k 4
0
k1 + k 4
0
−k 2
−k 3
k2 + k3
0
0
0
0
−k 6
0
k5 + k6 0
0
0
0
0
−k 2
+k 2
0
0
0
0
0
0
−k 8
0
0
0
k 7 + k8 0
0
[K ] = 0
−k 3
+k 3
0
0
0
0
0
0
k4 + k9
−k 6
−k 8
−k 9
0
0
0
−k 4
k 6 + k8
0
−k 9
0
0
0
0
0
k 9
0
0
0
0
0
0
0
0
0 c5 + c 6 0
0
0
0
0
0
0
0
0 c7 + c8
0
0
0
0
0
0
0
0
0
0
0
− c6
0
− c8
0
0
0
0
0
0
−c4
0
−c6
0
0
0
0
0
− c8
0
0
0
c 4 + c6 +
− c9
c9+c8
− c9
c9
Les valeurs de masses pour ce modèle sont :
Tableau 2.3 : Masses du modèle
Après résolution de l’équation (2.2), les valeurs des paramètres sont identifiées en minimisant le RMS
jusqu’à 1.22.
23
État Initial
Raideurs (N/m)
K1
K2
K3
K4
K5
K6
K7
K8
K9
30.00
900000
1000000
1000000
30
100
30
4000000
300000
Valeurs finales
Amortissements
(N.S/m)
C4
C5
C6
C7
C8
C9
0.5
300000
1.5
6000
8000000
1000
Raideurs (N/m)
K1
48.8660
K2 915522.58
K3 1206875.43
K4 1178694.84
K5
36.7265
K6 136.4661
K7
38.6678
K8 4761249.39
K9 389232.42
Amortissements
(N.S/m)
C4
C5
C6
C7
C8
C9
0.89
33114.21
1.7284
6764.6574
8648277.61
1595.52
Tableau 2.4 : Valeurs initiales et finales des raideurs et amortissements
La décélération de la masse m5 est périodique et tend vers 0 seconde en fin de simulation.
Le minimum enregistré est -11.88 (g) à 0.03s. Cela signifie que les forces internes générées suite à
l’impact persistent et que l’énergie cinétique ne se dissipe pas. Nous notons également qu’entre 0.04s
et 0.09s, l’écart entre le résultat numérique et expérimental est très important (Figure 2.6).Ce qui met
en doute ce modèle dont les 3 premières masses peuvent se déplacer transversalement.
Figure 2.6 : Décélérations numériques et expérimentales
de la masse 5.
24
2.1.3. Modèle3 : 5 masses en parallèle avec 5ddl
Le modèle est composé de 5 masses (Figure 2.7) connectées en parallèle, avec raideurs et
amortissements à déterminer : k1 , k2 , k3 , k4 , k5 , k6 , k7 , k8 , k9 , C4 , C5 , C6 , C7 , C8 , C9 .
Nous considérons seulement les degrés de liberté en translation. Il y a 5 degrés de liberté et nous
gardons les valeurs des paramètres identifiés précédemment.
Figure 2.7 : Modèle 5 masses en parallèle 5ddl
Les matrices K, C du problème sont :
0
−k 2
−k 3
−k 4
k1 + k 2
+k 3 + k 4
−k 2
k2 + k6
0
−k 6
0
+k 5
−k 3
0
k 7 + k8
0
−k 8
+k 3
−k 4
k8 + k 4
−k 6
−k 8
−k 9
+k 6 + k 9
0
0
0
−k 9
k 9
−c 4
0
0
0
c4
0 c 6 + c5
−c 6
0
0
0
−c8
0
c7 + c8
0
−c 6
−c8
c8 + c 4
− c9
−c 4
+ c 6 + c9
− c9
c9
0
0
0
En utilisant la même méthode de résolution et à l’aide du programme Matlab ‘Optim_5LH.m’ (annexe
B2) nous obtenons les résultats suivants (Figure 2.8)en termes d’accélérations de la masse m5 pour un
RMS =0.47.
25
Figure 2.8 : Décélérations numériques et expérimentales
de la masse 5
La courbe est similaire au modèle 5 masses en série. Il y a un minimum global de -37.37(g) autour de
0.05s et une stabilisation autour de 0 à 0.15s.
2.2. Conclusion
Ces modèles simplifiés donnent une prédiction cohérente avec les données expérimentales. Cela est dû
au programme d’optimisation qui a pu identifier les valeurs de raideurs et amortissements.
L’écart observé sur les courbes se justifie par l’absence de composantes physiques ou mécanique
réelles dans les modèles, les temps de simulation très court et le déphasage entre les systèmes simulés
et expérimentaux résultant des mesures de temps différentes. Par conséquent, le manque de physique
nous oblige à considérer d’autres modèles numériques développés sous LS DYNA.
26
Chapitre 3
3. Modèle non linéaire sous LS DYNA
Ce chapitre présente le modèle éléments finis développé aux États-Unis [10], ses caractéristiques, ses
matériaux et lois de comportement. Les résultats de simulation du modèle pour les trois phases
d’accident sous LS DYNA vont servir comme référence dans le processus d’optimisation.
27
3.1. Modèle LS DYNA
Il a été développé par le centre national d’analyse des crashs tests à l’université de Washington. C’est
un modèle éléments finis (Figure 3.1) composé de : 336 parties de 270768 éléments, dont 283859
nœuds, 2852 solides, 122 poutres, 267786coques.
Notons que les commandes LS DYNA sont exploitables sur http://www.dynamore.de/enet les
détailsdu modèle sont disponibles sur le site de l’organisation NHTSA.
Figure 3.1 : Modèle LS DYNA
DODGE (1333Kg)
Quant à la barrière qui va impacter la voiture, elle est en acier de dimensions : 1441*2108 mm 2 .
La voiture est de masse 1354kg et roule sur un sol d’épaisseur 66mm.Nous détaillons quelques lois de
comportement utilisés pour les principales composantes : Capot, radiateur, moteur, pare-chocs,
Firewall, A-Pilar, B-Pilar. En raison du nombre important des pièces, nous illustrons quelques
exemples de lois de comportement seulement pour les matériaux utilisés.
Une combinaison de matériaux élasto-plastiques pour le pare chocs, et mousse dont les propriétés en
termes de masse volumique, module d’élasticité, coefficient de poisson et limite d’élasticité sont
représentés dans le tableau 3.1.
Masse
volumique
(Kg/m^3)
Module
d’élasticité
(MPa)
Limite
d’élasticité
(MPa)
Coefficient de
Poisson
Matériau 1
7.89*1e-9
280000
45.0
0.3
Matériau 2
1.2*1e-9
210000
570
0.3
9.13*1e-11
200000
0.1
Mousse
Tableau 3.1 : Caractéristiques matériau du pare chocs
La loi de comportement élasto-plastique est représentée dans la figure 3.2.
28
L’équation qui décrit la pression pour la surface de la limite d’élasticité.
La fonction potentielle, g = g ( sij ) ;
Figure 3.2 : Loi de comportement
élasto-plastique
Le potentiel plastique g est identique à F tel que :
'
Pour la mousse, la loi de comportement est de type : σ ij = 2 µεij′ où εij′ est le tenseur déviatorique des
contraintes et µ la viscosité dynamique.
Pour modéliser le radiateur, une structure de plusieurs sections surfaces a été utilisée en forme de nid
d’abeilles et autre matériau élasto-plastique représentés dans le tableau 3.2.
Matériau
Masse
volumique
(Kg/mm^3)
Module
de Young
(MPa)
Coefficient
de
Poisson
Limite
d’élasticité
(MPa)
Volume
relatif(en état
de
compression)
Nid d’abeille
1.47*1e-10
2070
0.3
140
0.2
Matériau
Elasto-plastique
7.8*1e-5
210000
0.3
370
Tableau 3.2 : Matériaux utilisés pour le radiateur
29
Quant au capot, les propriétés du matériau élasto-plastique d’une section surface sont représentés dans
le tableau 3.3.
Masse
volumique
(kg/mm^3)
7.89*1e-9
Module de
Young
(MPa)
Coefficient de
Poisson
Limite
d’élasticité
(MPa)
210000
0.3
300
Tableau 3.3 : Matériau utilisé pour le capot
Le moteur est composé de plusieurs sections dont la masse volumique, module d’élasticité, coefficient
de Poisson sont respectivement : 7.89*1e-10 (Kg/m^3), 210000 MPa et 0.3.
La partie support entre les parties basses (capot &portes) avec le dessus du véhicule, a les propriétés
suivantes : Masse volumique, module d’élasticité, coefficient de Poisson, limite d’élasticité : 7.89*1e-10
(Kg/mm^3), 210000 MPa, 0.3 et 400MPa.
Notons que pour le type de section utilisé pour chacune de ces parties du devant de la voiture, LS
DYNA offre la possibilité d’utiliser une multitude de sous routines recensé dans le tableau 3.4.
30
Tableau 3.4 : Types d’éléments disponibles pour une section coque
Pour joindre les parties principales, citées précédemment et autres : pare-brise, roues, portes, plusieurs
contraintes sont utilisés : cinématiques, dans les nœuds de corps rigide, sphériques, rotules, ainsi que le
contact par soudure.
Pour le matériau de la soudure, les propriétés sont indiquées dans le tableau 3.5. La soudure se
comporte de manière élasto-plastique avec écrouissage.
Masse
Module
volumique de
(Kg/mm^3) Young
(MPa)
7.8*1e-9
210000
Coefficient Limite
de Poisson élastique
σy
(MPa)
0.28
370
Module
tangent
Et
Temps
de calcul
∆t (ms)
(MPa)
0.5
1.21e-6
Tableau 3.5 : Propriétés de soudure
31
En effectuant un test avec une vitesse initiale de 15 m/s, nous obtenons un profil d’accélération (Figure
3.3) pour le siège et mannequin similaire à une cloche, c’est-à-dire nulle au départ de la simulation et
atteint un minimum de −33.32m / s 2 à 0.07s avant de redevenir quasiment nulle vers la fin de la
simulation0.15s.
Les écarts sont plus importants dans la deuxième phase du crash test, entre 0.05set0.08s.
Figure 3.3 : Comparaison des modèles expérimentaux
et éléments finis
Pour les déplacements de l’ensemble des deux structures; voiture et barrière, les figures 3.4, 3.5 et 3.6
montrent que :
a) Durant la première phase, à une vitesse de 15 m/s, le maximum en déplacement est de 311.8 mm.
b) Pour la deuxième phase, le bloc avant de la voiture se compresse et subit de grands déplacements
et un écrasement. Les frontières droites et gauches de la voiture subissent un flambage.
c) Les valeurs maximales et minimales en déplacement sont 1408.5mmau bloc avant et -2.48 mm.
À la fin de la simulation, les déplacements baissent autour de 2347.52 mm.
32
Figure 3.4 : Déplacements suivant x (1ère phase)
Figure 3.5 : Déplacements suivant x (2éme phase)
Figure 3.6 : Déplacements suivant x (3éme phase)
33
Chapitre 4
4. Fonctionnement de MapleSim et présentation des nouveaux
modèles physiques
Ce chapitre présente par le biais d’un tutoriel de modélisation les caractéristiques physiques de
MapleSim, c’est-à-dire : (1) modéliser facilement des systèmes physiques via une interface graphique
schéma-bloc, (2) accéder à tout moment aux équations du système et (3) créer de nouveaux
composants à partir de leurs équations, définies dans le logiciel Maple. Par la suite, nous exposons la
méthode suivie pour construire les deux modèles paramétriques du véhicule qui seront simulés.
Finalement, les résultats sont justifiés et comparés aux valeurs expérimentales.
34
4.1. Introduction
Dans le but de représenter davantage la physique du problème et non le résoudre comme un problème
matriciel mathématique, nous avons optés pour le logiciel MAPLESIM, qui offre des moyens de
simulation dynamique intéressants et capable de générer les équations du problème quel que soit sa
complexité.
Étant donné que l’objectif principal consiste à se rapprocher d’un crash test (Figure 4.1) dans lequel
toute la mécanique continue de la structure est impliquée, il est possible de faire correspondre la
structure à une composition de plusieurs masses et poutres flexibles, ressorts et amortisseurs en 3
dimensions.
Figure 4.1 : Simplification du modèle continu
L’avantage de cette modélisation est : (1) l’exploitation de modèles discrets en utilisant la méthode des
réseaux vectoriels, basée sur la dynamique lagrangienne [27], et (2) effectuer le calcul sans maillage
par éléments finis de la structure.
Brièvement, la méthode des réseaux vectoriels consiste à générer un graphe linéaire, permettant par la
suite d’isoler les variables physiques, la matrice d’incidence et les équations du problème (Figure 4.2).
Figure 4.2 : Dynamique et principe des réseaux
vectoriels (voir cours de Mr Richard [27])
35
4.2. Tutoriel : Modélisation d’un mécanisme bielle – coulisseau
Le mécanisme bielle coulisseau est un système de transformation de mouvement. Il est constitué de
trois corps rigides de masse m1, m2 et m3=0 (point avec masse négligeable) sous l’effet de la gravité.
Pour le modéliser sous MapleSim, il importe de suivre les étapes suivantes :
•
•
•
•
•
Définir et assigner les paramètres globaux;
Créer les 2 bielles (2 unités de longueur) avec centre de masse situé à leur centre (Bodies and
frames);
Ajouter la masse 3 et les joints (pivot1, pivot2, pivot3 et rainure horizontale);
Donner les conditions initiales de simulation (angles);
Choisir les variables de sortie (Probe properties).
La figure 4.3 représente le modèle final pour un mécanisme simple bielle-coulisseau.
Figure 4.3 : Modèle MapleSim pour le système bielle-coulisseau
Les paramètres de simulation sont regroupés dans la liste suivante :
Temps : 10 secondes / Tolérance & erreur : 1*10-3
Méthode d’intégration : Rosenbrock (plus rapide)
Compilateur : False car le modèle est simple et ne prend pas d’ajustement de pas de
calcul.
ml 2
• Moment d’inertie :
(l = 2 pour chacune des membrures).
12
Visuellement, la simulation est représentée dans les figures 4.2, 4.3, 4.4 et 4.5 avec la condition
•
•
•
initiale : q1 =
π
4
5.15s et 9.62s).
36
. Elle nous permet d’observer les mouvements pendant les instants. (t = 0s, 2.3s,
Figure 4.4 : Position initiale (q1 =
π
4
) à T = 0s
Figure 4.6 : Position à T=5.15s
Figure 4.5 : Position à T = 2.3s
Figure 4.7 : Position à T=9.62s
Les centres de masse (Figure 4.8) des deux bielles parcourent respectivement un cercle de rayon
0.5 m et une ellipse.
Figure 4.8 : Trajectoire des deux centres
de masse
L’outil « Create an attachement from Template / Multibody Analysis »permet de retrouver les
équations de mouvements.
Avant d’exécuter ce module, il est important de choisir les variables relatives pour éviter que les
équations de masse soient calculées en fonction des coordonnées générales.
La procédure pour les modifications des conditions de rotation ICθ ,ω sont représentées sur la figure 4.9.
37
Figure 4.9 : Choix des coordonnées relatives q1 et q2
Après validation, le module ouvre une interface avec Maple et permet de générer les équations
dynamiques du mécanisme.
Les informations suivantes sont disponibles dans le logiciel Maple :
38
-
Système à résoudre et paramètres : Système a 1 degré de liberté et 2 coordonnées.
-
Matrice masse :
-
Les équations de contraintes :
-
Vecteur forces externes :
En imposant la condition initiale de q1 = π , nous obtenons les résultats représentés dans la figure 4.10
4
pour les angles q1 et q2 (phi, w et a représentent respectivement les déplacements, vitesses et
accélérations angulaires).
Déplacement angulaire q1
Déplacement angulaire q2
39
Vitesse angulaire q1
Vitesse angulaire q2
1
Accélération angulaire q
2
Accélération angulaire q
Figure 4.10 : Résultats de simulation
La masse 3 glisse dans une rainure horizontale le long de l’axe des x et entraine un mouvement
périodique des masses m1 et m2. Leurs angles respectifs q1 et q2 ont une période identique et une
amplitude différente. Voici, les valeurs minimales et maximales (Tableau 4.1) :
Période (s)
Maximum
Minimum
q1 (rad)
q2 (rad)
0.787
-3.909
14.14
4.737
q1
(rad/s)
3.454
-3.436
q2
(rad/s)
4.5
6.90
-6.871
q1
(rad/s^2)
(rad/s^2)
+10.001
-10.027
+19.89
-20.065
Tableau 4.1 : Valeurs maximales et minimales
40
q2
4.3. Modèles physiques paramétriques sous MapleSim
Dans ce travail, nous avons développé deux modèles physiques paramétriques pour la simulation
d’impact frontal en utilisant Matlab, MapleSim et Maple.
Avant d’expliquer la procédure générale, il est important de :
•
•
•
•
Créer le fichier MapleSim (.msim) du modèle dynamique qu’on souhaite analyser.
Concevoir un fichier Maple (.mws) qui va appeler et analyser le modèle MapleSim précèdent
sans passer par son interface.
Ajouter dans ce fichier un appel de paramètres externes contenus dans un fichier Excel.
Convertir sous format (.maplet) le fichier précèdent afin qu’il soit lisible par le solveur
cmaple.exe.
Après conversion du fichier, nous sollicitons Matlab pour utiliser un algorithme général (Figure 4.11)
permettant d’identifier les paramètres recherchés pour les deux modèles physiques. Ces paramètres
seront les valeurs de raideurs, amortissements et masses, permettant d’obtenir un RMS, inférieure à la
limite définie, c’est-à-dire proche des résultats expérimentales d’accélération
Figure 4.11 : Méthode paramétrique
physique
41
Matlab appelle les paramètres d’entrée dans le fichier Excel, ensuite le solveur cmaple.exe pour lire le
fichier Maple conçu précédemment, contenant un rappel vers le modèle dynamique de MapleSim.
Après simulation du modèle, les résultats sont récupérés dans un fichier de sortie pouvant être traité
directement sur Matlab.
De manière plus explicite, le processus de calcul pour un modèle dynamique de véhicule (Figure 4.12)
s’effectue de la manière suivante :
•
•
•
•
Récupération des résultats expérimentaux et ceux provenant de MapleSim.
Calcul du RMS (erreur moyenne quadratique des accélérations).
Vérification du critère de limite. (Lim = 0.1).
Appel des algorithmes génétiques avec contraintes pour générer de nouveaux paramètres.
Figure 4.12 : Processus du calcul
42
Pour la simulation d’impact d’un modèle de véhicule Dodge 2001, nous considérons uniquement les
masses ci-dessous :
•
•
•
•
•
m1 : radiateur
m2 : Suspension et les éléments du bas de la structure
m3 : Moteur et les parties structurelles du haut de la voiture
m4 : La structure du bloc avant contenant le conducteur
m9 : Le conducteur et le siège (avec moyens de sécurité)
L’ensemble de ces masses sont reliées par des ressorts et des amortisseurs. Ces derniers sont les
paramètres à trouver lors du processus d’identification, qui utilise une optimisation par algorithmes
génétiques.
Mathématiquement, le problème d’optimisation en utilisant la méthode des réseaux vectoriels [27]
peut être formulé comme suit:
Trouver K , C , m pour minimiser q tel que :
i
i
i
Mq+φqT λ = F
φ ( q ,t ) = 0
Kinf ≤ Ki ≤ Ksup
Cinf ≤ Ci ≤ Csup
minf ≤ mi ≤ msup
M : Matrice masse du système dynamique
T
φq : matrice jacobéenne des contraintes du modèle
φ ( q, t ) = 0 : équation de contraintes du modèle dynamique
λ
: multiplicateur de Lagrange
C : Coefficient d’amortissement
q
: Variables dynamiques
F : Forces externes
K : raideur
Les valeurs de raideurs, d’amortissement et de masses sont bornées. Les valeurs supérieures et
inférieures sont données en début de calcul.
43
4.3.1. Le modèle masses du véhicule
4.3.1.1.
Présentation
La méthode de construction du modèle est similaire à l’exemple du tutoriel :
•
•
Définir et assigner les paramètres globaux;
Créer les ressorts et les masses mi , i=1 à 9 (bodies and frames);
•
•
•
Ajouter les liaisons, les paramètres et les outils pour la visualisation;
Donner les conditions initiales de simulation (vitesses initiales);
Choisir les variables de sortie (Probe properties : Accélérations et vitesses).
A l’aide des outils MapleSim « bodies & frames » et « joints & motions », nous créons les
composantes principales du modèle (Figure 4.14), c’est-à-dire 9 masses connectées par des liaisons
rotules et prismatiques. Les propriétés de ces liaisons sont présentées dans la figure 4.13.
La liaison prismatique décrit un mouvement de
La liaison rotule décrit un mouvement de translation horizontale du solide 2 par rapport au
rotation (1ddl) entre les deux solides 1 et 2, liés solide 1 suivant l’axe Ox (1,0,0) .
aux
repères
x1 y1 z1 et x2 y2 z2 . Ses paramètres sont :
Ses paramètres sont :
• L’axe de translation e1 : Ox (1,0,0)
• L’axe de rotation v0 : Oz (0,0,1)
• k : constante de raideur (ressort de
compression)
• k : constante de raideur (ressort de
torsion)
• L0 : longueur initiale du ressort
• φ0 : rotation initiale du ressort
• C : coefficient d’amortissement
• ICs ,v : indique les degrés de liberté à
• C : coefficient d’amortissement
• ICθ ,ω : indique les degrés de liberté à
prendre en compte (déplacement ou
vitesse)
prendre en compte.
• s0 : déplacement initial du joint selon e1
• θ 0 : rotation initiale du joint au début de
•
44
la simulation
• v0 : vitesse initiale en début de simulation
ω0 : vitesse angulaire initiale
Figure 4.13 : Propriétés des liaisons prismatique et rotule
Les rotules sont positionnées autour des masses afin de faciliter le mouvement du mécanisme.
La masse 4 (structure du bloc avant du véhicule) est représentée par une chaîne de 5 masses,
connectées par des liaisons.
Figure 4.14 : 1er modèle MapleSim du véhicule
Pour simuler le mécanisme, nous prenons comme valeurs initiales:
- Temps de simulation =0.15 s.
- Méthode de Rosenbrock pour l’intégration numérique.
- La gravité g=9.81m/s^2est dirigée selon (0, 0,-1).
- Condition initiale de vitesse : 14m/s.
- Raideurs et amortissement pour les liaisons prismatiques (Tableau 4.2)
Raideurs (N/m)
Amortissement
(N.S/m)
k1
k2
k3
k4
k5
k6
k7
k8
k9
48.86
915522
1206875
11786940
36.72
136.46
38.66
4761249
389232
C4
C5
C6
C7
C8
C9
C10
k10
0.89
33114.21
1.72
6764.65
8648277 5000
50.0
300
Tableau 4.2 : Valeurs initiales des raideurs et amortissements
45
Figure 4.15 : Répartition des raideurs et
amortissements
Les liaisons prismatiques suivantes ne comportent pas d’amortissement :
•
•
•
Entre la masse 1 et le bâti
Entre la masse 1 et les masses 2 et 3
Entre les masses de la chaîne
Suite à ces conditions initiales, le mouvement résultant est représenté dans la figure 4.16
T=0.134s
T=0.04s
Figure 4.16: Simulation du modèle (instants
0.04 et 0.134s)
46
Avant d’identifier les valeurs des paramètres ki , Ci et mi , Il faut déterminer les longueurs initiales des
ressorts Li , i = 1 a 10 . En effet, nous admettons que ces longueurs (Tableau 4.3) sont égales aux
distances réelles entre les différentes masses du bloc avant d’un modèle de véhicule Dodge 2001
(Figure 4.17). Ces mesures sont extraites du document de référence de la NHTSA ‘Exponent, failure
analysis associates; Test number 091101; Project no : PH06608’. Ces longueurs sont responsables
des mouvements dynamiques non uniformes et non symétriques entre les masses.
Figure 4.17 : Bloc avant d’un
modèle de véhicule Dodge 2001
Longueurs
initiales Li
L=
L=
L7
1
5
L2
L3
L=
L=
L8
4
6
L9
L10
Valeurs (m)
0.664
0.899
0.899
0.511
0.663
0.05
Tableau 4.3 : Valeurs des longueurs initiales
L’option ‘Reinforce’ du logiciel MapleSim permet d’intégrer un degré de liberté au problème. Si le
nombre de paramètres est très important, le calcul peut être très long et produit des singularités. D’où
l’intérêt d’utiliser ‘Treat as guess’ pour certaines variables du problème (voir documentation
47
MapleSim).Les ressorts et amortisseurs sont linéaires et équipés de liaisons rotules afin de faciliter le
mouvement des masses.
4.3.1.2.
Programme MATLAB
Le programme ‘Modele_masses.m’ (annexe C1) permet d’identifier les valeurs de raideurs et
amortissements permettant de minimiser l’erreur moyenne quadratique de l’accélération de la masse 9
(conducteur et siège). La structure est présentée dans la figure 4.18:
Figure 4.18 : structure du programme
Matlab du modèle
La phase d’optimisation consomme un espace mémoire très important en raison des rappels du logiciel
MapleSim, qui doit à la fois intégrer les valeurs initiales des paramètres et exécuter le système
matriciel, résultat de la méthode des réseaux vectoriels appliquées au modèle du véhicule.
La fonction contrainte permet de limiter le champ de recherche de certaines valeurs en utilisant des
relations entre les paramètres.
Après investigation de l’article de recherche [15], les paramètres k9 , C9 , k10 , C10 et k4 sont laissés
libres. Les autres raideurs et amortissements sont contraints par les relations :
48
4761289
k 7 + k8 =
k + k =
1178744
1 4
174
k5 + k6 =
8361
C7 + C8 =
C6 + C7 =
33117
k3 ≤ 12006876
L’intérêt final est d’obtenir des valeurs d’accélération et vitesses pour la masse du conducteur et le
siège ( m9 ) très proches des valeurs expérimentales.
Les meilleurs résultats (Figure 4.19) de raideurs et amortissement obtenus sont :
Figure 4.19 : Paramètres finaux
obtenus
Pendant les itérations de calcul, nous avons constaté que les paramètres C9 et k9 sont les plus
sensibles aux variations d’accélérations et vitesses. Par conséquent, les meilleurs résultats seront
donnés en fonction de celles-ci.
4.3.1.3.
Matrices du modèle et courbes de simulation
Les paramètres identifiés dans la section précédente sont fixes. Seuls, C9 et k9 varient pour analyser
plusieurs
profils
de
vitesses
et
accélérations
de
la
masse
9.
Le module ‘Multibody analysis’ permet de retrouver les équations du problème (Figure 4.20).
49
Voici l’aperçu au début de la phase de calcul. Il y a 123 équations au départ, simplifiées à 119 en
considérant les contraintes du système.
Malheureusement, les valeurs de matrices masses et vecteurs forces externes et contraintes ne seront
pas présentées en raison de leurs tailles et du nombre important de degrés de liberté (15ddl).
Toutefois, il est possible de les exporter et visualiser sur un fichier Excel.
Figure 4.20 : Matrices du mécanisme
Le rendu 3D du mécanisme montre (Figure 4.21) un enfoncement des 3 premières masses vers le bâti
à 0.058s. Ensuite, il y a une déformation des 5 masses de la chaîne et une compression plus importante
des ressorts k1 , k5 et k7 lors de la deuxième phase de l’impact.
50
T= 0.058s
T=0.15s
Figure 4.21 : Simulation du modèle
optimisé (instants 0.058 et 0.15s)
Après résolution du système d’équations, nous obtenons les courbes suivantes pour la masse 9, qui
varient en fonction des paramètres C9 et k9 :
• k9 71276( N /=
=
m) et C9 1089.41( N ⋅ S / m)
La valeur minimale de l’accélération -37.36(g) est atteinte en 0.0364 s (Figure 4.22), équivalent à un
décalage de 0.0341 s par rapport à l’accélération expérimentale.
Ce déphasage est présent seulement dans la zone [0.014 s, 0.083s]. Pour la zone [0.08s, 0.15s] où
l’accélération augmente de -14g jusqu’à 7g, les fluctuations des deux accélérations sont très proches.
Figure 4.22 : Courbes d’accélérations numérique
et expérimental
Puisque le modèle est simplifié, il est normal d’obtenir un léger déphasage pour une période
d’impact 0.15s. Nous observons que les vitesses expérimentales et numériques Vit _ Exp et Vit _ Sim ont
la même tendance (Figure 4.23). L’erreur relative ne dépasse pas 2% sauf entre 0.06s et 0.1s où elle
atteint 9%. Le minimum atteint est -2.53 m/s pour la vitesse expérimentale, contrairement au cas
numérique où la valeur minimale est -0.3 m/s.
51
Figure 4.23 : Vitesses expérimentale et numérique
• k9 14759( N / m=
=
) et C9 4266( N ⋅ S / m )
L’accélération numérique Acc _ Sim (Figure 4.24) ne dépasse pas -27g. Elle remonte progressivement
à 0 entre 0.05s et 0.132s.
Fig.4.24 : Accélérations expérimentale et
numérique
Les vitesses expérimentales et numériques Vit _ Exp et Vit _ Sim sont cohérentes (Figure 4.25); l’écart
dépasse 3%seulement dans la zone [0.12s, 0.15s].
52
Fig.4.25: Comparaison des vitesses et
accélérations
4.3.2. Modèle Bielles-masse
4.3.2.1.
Présentation
Contrairement au modèle précédent, les masses m1 , m2 , m3 et m4 sont remplacées par les bielles 1 et
2, composées d’assemblage de 3 ou 5 petites bielles (Figures 4.26 et 4.27). Leurs propriétés sont :
• masses : m1 = 540kg et m2 = 704kg ;
•
longueurs=
finales : l1 1.61
=
m et l2 1.614m ;
•
moments d’inertie : I zz1 = 4.92kg m 2 , I zz 2 =16.88kg m 2 .
Nous considérons la même masse m9 (conducteur et siège) du modèle précèdent. Les liaisons rotules
sont placées entre les bielles (Figure 4.26) afin de faciliter le mouvement et éviter les singularités lors
de l’impact.
53
Fig.4.26 : Assemblage des 3 bielles par
des rotules
Figure 4.27 : Modèle final bielles-masse
Les paramètres à identifier (Figure 4.28) dans ce cas sont : raideurs, amortissements et les masses des
deux bielles k1 , k4 , k5 , k6 , k7 , k8 , k9 , k10 , k11 , C4 , C5 , C6 , C7 , C8 , C9 , C10 , C11 , m1 , m2 . Les valeurs de masse
varient légèrement afin de réduire l’erreur moyenne quadratique de l’accélération lors de la phase de
calcul.
Les ressorts et amortisseurs k10 , k11 , C10et C11 sont introduits dans les limites de bielles afin d’éviter
tout dysfonctionnement causé par la traction-compression des ressorts k5 , k6 , k7 et k8 (Figure.4.28).
Le nombre de paramètres est réduit à17 en admettons que :
k 6 = k8
C6 = C8
54
Figure 4.28 : Répartition des raideurs et
amortissements
Nous admettons les valeurs suivantes pour les longueurs initiales des ressorts :
• 0.299m pour k6 et k8
•
0.664m pour k5 , k7 et k1 (variable DIS)
•
0.511m pour k4 (variable h1 )
•
0.05m pour k10 et k11 (variable d)
•
0.663m pour k9 (variable h2 )
4.3.2.2.
Programme MATLAB
Structurellement, le programme ‘Modele_bielles.m’(annexe C2) d’identification des raideurs,
amortissements et masses est présenté dans la figure ci-dessous :
55
Figure 4.29 : Structure du programme
Modele_bielles.m
La fonction objective est similaire au cas précèdent. Il y a modification des contraintes, tels que :
85.58
k5 + k1 =
k + k =
87.6
7 1
k8 + k 4 =
5939944.23
8648278.51
C8 + C4 =
C5 ≤ 33115
C7 ≤ 6765
k10 = k11
C10 = C11
m ≤ 570
1
m2 ≤ 705
Après plusieurs itérations de calcul des accélérations et vitesses de la masse 9, les meilleurs résultats
(Tableau 4.4) permettant de donner une erreur moyenne quadratique très petite sont :
56
Raideurs (N/m)
Amortissement
(N*S/m)
Masses (Kg)
k1
k4
k5
k 6 = k8
k7
k8
k9
k10 = k11
48.86
1.1786 ⋅ 106
36.72
136.4661
38.66
4.76 ⋅ 106
71276
100003
C4
C5
C6 = C8
C7
C9
C10 = C11
0.89
33114.21
1.7284
6764.65
1089.41
2007.48
m1
m2
548.29
704.60
Tableau 4.4 : Valeurs optimales des
paramètres
4.3.2.3.
Matrices du modèle et courbes de simulation
Voici l’aperçu au début de la phase de calcul. Il y a 93 équations au départ, simplifiées à 89 en
considérant les contraintes du système.
Le module ‘multibody analysis’ permet de visualiser les étapes de calcul. Les matrices peuvent être
exportées
et
visualisées
sur
un
fichier
Excel.
Il y a 5 degrés de liberté et 21 équations de contraintes.
57
Figure 4.30 : Matrices du modèle
bielles_masse
Durant la simulation, la première bielle encaisse le retour d’énergie cinétique (Figure 4.31) et garde un
profil courbé. La structure frontale et la masse m9 continuent de s’enfoncer (moteurs et suspension)
jusqu’à 0.11s. Ensuite, la masse commence à reprendre sa position initiale.
T=0.15s
T=0.08s
Figure 4.31 : Rendu 3D de la simulation
du modèle optimisé
Pour les paramètres optimisés
=
k9 71276( N /=
m ) et C9 1089.41( N ⋅ S / m ) , il y a une décélération
rapide de la masse 9 dans l’intervalle [0,0.04s], puis une quasi stabilisation jusqu’à 0.08s.On note -26
(g) comme valeur minimale. Ensuite, l’accélération augmente jusqu’à 8.5 (g).
58
On note un écart important (Figure 4.32) entre les valeurs numériques et expérimentales
Acc _ Sim et Acc _ Exp dans la zone [0.05, 0.08s].
Figure 4.32 : Accélération du modèle
bielles-masse
Pour les vitesses (Figure 4.33), les deux modèles Vit _ Exp et Vit _ Sim sont cohérents, sauf dans
l’intervalle [0.1, 0.15s], on note un écart proche de 3%.
Figure 4.33 : Vitesse du modèle
bielles-masse
59
Ces deux modèles paramétriques ont permis d’approcher les résultats expérimentaux, sans faire appel
aux calculs complexes, mais simplement en utilisant la dynamique lagrangienne combiné aux
méthodes de graphes via MapleSim.
Les résultats en vitesses sont très convaincants dans les 11première millième secondes de l’impact
malgré le fait qu’elles augmentent légèrement à la fin de la simulation. Cela est dû aux mouvements
non linéaires des masses, difficiles à contrôler lors de la dissipation complète d’énergie cinétique.
Quant aux accélérations, nous avons une cohérence globale pendant les 0.15 secondes de l’impact
mais pas locale dans la zone 0.06 à 0.09 s. Nous observons en effet les faits suivants :
•
•
Un déphasage de la courbe avec un minimum à 0.05 secondes.
Un minimum global de -27g.
Ces deux conséquences inattendues se justifient par le temps très court de l’impact qui ne facilite pas
l’analyse approfondie car les mouvements sont non linéaires et très rapides. Également, nous
admettons une erreur dans les valeurs expérimentales et numériques correspondantes pour chaque
temps de simulation.
60
Chapitre 5
5. Conclusion et perspectives
Ce travail a permis d’aborder un domaine physique différent qui implique à la fois de la mécanique au
sens de Lagrange, un calcul complexe formel sous Maple et un calcul numérique faisant intervenir de
l’optimisation par le biais des algorithmes génétiques sous Matlab.
La première partie de l’étude a porté sur la validation des modèles linéaires de de Dr J. Marzbanrad et
Dr M. Pahlavani, malgré le petit déphasage présent lors de la décélération durant la phase d’impact.
Les valeurs de raideurs et amortissements figurant dans leurs travaux de recherche ont été vérifiées et
introduits comme référence pour l’investigation des possibilités lors de la phase d’identification de
l’algorithme du calcul général.
Dans un deuxième temps, nous avons exploités le modèle élément fini développé à l’université de
Georges Washington. La cohérence des résultats éléments finis et expérimentaux montrent la
puissance du modèle LSDYNA, qui contient une multiplicité de composants, matériaux et lois de
comportements linéaires et non linéaires. Quant au logiciel MapleSim, qui est la clé du projet, a permis
de dégager de bonnes valeurs de vitesse mais des accélérations déphasées, ayant un écart dans la zone
[0.05, 0.09] supérieur à 3%. Ces valeurs nous ont laissés perplexes vis-à-vis des formules de calcul,
des valeurs initiales de raideurs et amortissements, et parfois même la fonction objective du
programme d’optimisation.
Par la suite, nous avons pu noter que les valeurs des raideurs et amortissements accompagnant le
conducteur sont les plus importantes, car ils encaissent le reste de l’énergie cinétique. Leur sensibilité
a été analysée mais n’a pas permis d’obtenir de meilleurs résultats. Nous avons pu remarquer
également qu’il y a des seuils au bout desquels les changements de valeurs des paramètres n’ont aucun
effet sur les requêtes de sortie. Le nombre de paramètres identifiables est important également car la
mémoire de calcul devient très conséquente pendant la phase d’optimisation.
Nous proposons comme perspectives et poursuite de recherche les points suivants :
• Introduction de paramètres supplémentaires tels que les longueurs initiales de ressorts [28];
• la possibilité d’ajustement des paramètres existants;
• l’introduction de plusieurs fonctions objectives et fonctions contraintes;
• la possibilité d’analyser l’ajout de non linéarités pour les ressorts et amortisseurs;
• et finalement la conception des modèles paramétriques sur ADAMS.
Une fois ces améliorations réalisées, nous pourrons discuter des possibilités d’application de ces
modèles dans le domaine des transports; automobile, aéronautique, ferroviaire pour fournir une
prédiction rapide du phénomène d’impact frontal.
61
ANNEXE A
A.1
Méthode de représentation par variables d’état
Elle permet de résoudre un système d’équations dynamiques linéaires de n inconnues :
M {
xi } + C { xi } + k { xi } =
{0}
Il s’agit de poser le système suivant :
=
x A x + Bu
=
y C x + Du
[ 0]n×n
[ I ]n×n
A=
−1
−1
− [ M ] [ K ] − [ M ] [C ]
B = [ 0]2 n×1
C = [ I ]2 n×2 n
D = [ 0]2 n×1
Les déplacements, vitesses et accélérations sont regroupées dans les vecteur x et x tel que :
x1
x1
..
..
..
..
xn
xn
x = ; x =
x1
x1
..
..
..
..
x
n
xn
Dans Matlab, les commandes prédéfinies pour calculer ces quantités sont :
• Sys = ss(A, B, C, D),
• [y,t]=initial (sys, x0, t)
Tel que x0 est le vecteur déplacement/vitesse initial et t l’intervalle de temps pour la simulation.
62
A.2
Méthode Newmark
Les équations du problème à résoudre :
[ M ]{q} + [C ]{q} + [ K ]{q} =
{F }
Il s’agit de déterminer {qn +1} et {qn +1} connaissant {qn } ,
{qn } , {qn } et {F } en
utilisant une
approximation de {qn +1} et {qn +1} par développement de série tronquée.
Algorithme :
Stabilité
63
ANNEXE B
B.1
Programme MATLAB Optim_5ddl.m
Programme principal
%% Données initiales
m1=50; m2=100; m3=300; m4=820 ;m5=80;
c1=19919388.21; c2=19917598.56; c3=0.18304; c4=19777.1246; c5=810.8301;
k1=1341925.08; k2=1333105.21; k3=1117990.69; k4=1.91805; k5=572047.24;
R=[0;0;0;0;0];
sdof=5;
%% Matrices K,M,C
K=[k1+k2 -k2 0 0 0;-k2 k2+k3 -k3 0 0;0 -k3 k3+k4 -k4 0; 0 0 -k4 k4+k5 -k5;...
0 0 0 -k5 k5];
C=[c1+c2 -c2 0 0 0;-c2 c2+c3 -c3 0 0;0 -c3 c3+c4 -c4 0; 0 0 -c4 c4+c5 -c5...
;0 0 0 -c5 c5];
M=[m1,0,0,0,0;0,m2,0,0,0;0 0 m3 0 0; 0 0 0 m4 0; 0 0 0 0 m5];
%% Représentation par variables d’état
A=zeros(10,10);
A1=zeros(5,5);A2=eye(5,5);
A3=-inv(M)*K;A4= -inv(M)*C;
A(1:5,1:5)=A1; A(1:5,6:10)=A2;
A(6:10,1:5)=A3; A(6:10,6:10)=A4;
B=zeros(10,1);
H= eye(10,10);
D= zeros(10,1);
sys=ss(A,B,H,D);
t=[0.:0.00222:0.15];
x0 = [0;0;0;0;0;14;14;14;14;14];
[y,t,x] = initial(sys,x0,t);
VA=sys.A*x';
Dcl=VA(10,:)/9.81;
%% Fonction objective (RMS) a mimimiser
aexp2 = xlsread('Acc.xls','Acc','B2:B69');
aexp2 = aexp2';
Cost = rms((Dcl-aexp2)/mean(abs(aexp2)));
figure (1)
hold on
plot(t,Dcl,'r'); plot(t,aexp2,'b');plot(t,(Dcl-aexp2),'g');
64
%% Algorithme génétique
Lim = 0.1;
X0 = [199193.21 199175.56 0.1 1977.1246 81.8301...
13419.08 13335.21 11190.69 1.51805 57247.24];
%% Optimisation
ObjectiveFunction = @Obj_5ddl;
% nvars=[c1 c2 c3 c4 c5 k1 k2 k3 k4 k5]
nvars = 10;
% Lower bound
LB = [199193.21 199175.56 0.1 1977.1246 81.8301...
13419.08 13335.21 11190.69 1.51805 57247.24];
% Upper bound
UB = [19919388.2110 19917598.5614 0.18 19777.1246 810.8301 1341925.0874 1333105.2186
1117990.6919 1.91 572047.2444];
ConstraintFunction = @Cont_5ddl;
% % options GA
options = gaoptimset('PlotFcns',{@gaplotbestf,@gaplotmaxconstr},…
'Display','iter','FitnessLimit',Lim,'InitialPopulation',X0);
[x,fval] = ga(ObjectiveFunction,nvars,[],[],[],[],LB,UB,ConstraintFunction,options);
Sous programme Obj_5ddl.m
function Cost = Obj_5ddl(x)
%% nvars=[c1 c2 c3 c4 c5 k1 k2 k3 k4 k5]
%% Matrices K, M et C
K=[x(6)+x(7) -x(7) 0 0 0; -x(7) x(7)+x(8) -x(8) 0 0;0 -x(8) x(8)+x(9) -x(9) 0;0 0 -x(9) x(9)+x(10)
-x(10); 0 0 0 -x(10) x(10)];
C=[x(1)+x(2) -x(2) 0 0 0; -x(2) x(2)+x(3) -x(3) 0 0; 0 -x(3) x(3)+x(4) -x(4) 0;0 0 -x(4) x(4)+x(5).. x(5); 0 0 0 -x(5) x(5)];
M=[50,0,0,0,0;0,100,0,0,0;0 0 300 0 0; 0 0 0 820 0; 0 0 0 0 80];
R=[0;0;0;0;0];
sdof=5;
%% Représentation par variables d’état
A=zeros(10,10);
A1=zeros(5,5);A2=eye(5,5);
A3=-inv(M)*K;A4= -inv(M)*C;
A(1:5,1:5)=A1; A(1:5,6:10)=A2;
A(6:10,1:5)=A3; A(6:10,6:10)=A4;
B=zeros(10,1);
H= eye(10,10);
D= zeros(10,1);
sys=ss(A,B,H,D);
65
t=[0.:0.00222:0.15];
x0 = [0;0;0;0;0;14;14;14;14;14];
[y,t,x] = initial(sys,x0,t);
VA=sys.A*x';
Dcl=VA(10,:)/9.81;
%%% Calcul du RMS
aexp2 = xlsread('Acc.xls','Acc','B2:B69');
aexp2 = aexp2';
Cost = rms((-Dcl+aexp2)/mean(abs(aexp2)));
end|
Sous programme Cont_5ddl.m
function [c,ceq]=Cont_5ddl(x)
c=[];
ceq=[]
B.2
Programme MATLAB Optim_5LH.m
Programme principal
%% Données initiales
k1=48.69662504302646; K2=915522.58; k3=1206875.43; k4=1178694.84; k5=36.7265;
k6=136.4661; k7=38.6678; k8=4761249.39; k9=389232.42;
m1=300; m2=120; m3=150; m4=700; m5=80;
c4=0.8981; c5=33114.21; c6=1.7284; c7=6764.625204707899; c8=8648277.61;
c9=1595.479839438928;
R=[0;0;0;0;0;0;0;0];
sdof=8;
%%Matrices K,M et C
K=[k1+k4 0 0 0 0 0 -k4 0;0 k2+k3 0 -k2 0 -k3 0 0; 0 0 k5+k6 0 0 0 -k6 0;...
0 -k2 0 +k2 0 0 0 0; 0 0 0 0 k7+k8 0 -k8 0; 0 -k3 0 0 0 +k3 0 0;...
-k4 0 -k6 0 -k8 0 k4+k6+k8+k9 -k9; 0 0 0 0 0 0 -k9 k9];
M=[m1 0 0 0 0 0 0 0; 0 m1 0 0 0 0 0 0; 0 0 m2 0 0 0 0 0;...
0 0 0 m2 0 0 0 0; 0 0 0 0 m3 0 0 0; 0 0 0 0 0 m3 0 0;...
0 0 0 0 0 0 m4 0; 0 0 0 0 0 0 0 m5];
C=[c4 0 0 0 0 0 -c4 0; 0 0 0 0 0 0 0 0; 0 0 c5+c6 0 0 0 -c6 0;...
0 0 0 0 0 0 0 0; 0 0 0 0 c7+c8 0 -c8 0; 0 0 0 0 0 0 0 0;...
-c4 0 -c6 0 -c8 0 c4+c6+c8+c9 -c9; 0 0 0 0 0 0 -c9 c9];
66
%% Représentation par variables d’état
A=zeros(16,16);
A1=zeros(8,8);A2=eye(8,8);
A3=-inv(M)*K;A4= -inv(M)*C;
A(1:8,9:16)=A1; A(1:8,9:16)=A2;
A(9:16,1:8)=A3; A(9:16,9:16)=A4;
B=zeros(16,1);
H= eye(16,16);
D= zeros(16,1);
sys=ss(A,B,H,D);
t=[0.:0.00222:0.15];
x0 =[0;0;0;0;0;0;0;0;14;0;14;0;14;0;14;14];
[y,t,x] = initial(sys,x0,t);
VA=sys.A*x';
Dcl=VA(16,:)/9.81;
%% Calcul du RMS a minimiser
aexp2 = xlsread('Acc.xls','Acc','B2:B69');
aexp2 = aexp2';
Cost = rms((Dcl-aexp2)/mean(abs(aexp2)));
figure (1)
hold on
plot(t,Dcl,'r'); plot(t,aexp2,'b');plot(t,(Dcl-aexp2)/aexp2,'g');
hold off
%% Algorithme génétique
Lim = 0.1;
X0 = [k1 k2 k3 k4 k5 k6 k7 k8 k9 c4 c5 c6 c7 c8 c9];
%% Optimisation
ObjectiveFunction =Obj_5LH;
nvars = 15;
%% Borne inferieure
LB = [20.0 100000 1000000 1000000 20 80.0 20.0 3000000 200000....
0.1 20000 1.0 4000 7000000 1000];
%% Borne supérieure
UB = [48.86 915522.58 1206875 1178694.84 36.7265 136.4661 38.6678 4761249.39 389232.42....
0.8981 33114.21 1.7284 6764.6574 8648277.61 1595.52];
ConstraintFunction = @Cont_5LH;
% options
options = gaoptimset('PlotFcns',{@gaplotbestf,@gaplotmaxconstr},...
'Display','iter','FitnessLimit',Lim,'InitialPopulation',X0, 'TolFun', 1e-12);
[x,fval] = ga(@PIF_PAF,nvars,[],[],[],[],LB,UB,@PAF_PIF,options);
end
67
Sous programme Obj_5LH.m
function Cost = Obj_5LH(x)
%%
m1=300; m2=120; m3=150; m4=700 ;m5=80;
%%
K=[x(:,1)+x(:,4) 0 0 0 0 0 -x(:,4) 0;0 x(:,2)+x(:,3) 0 -x(:,2) 0 -x(:,3) 0 0; 0 0 x(:,5)+x(:,6) 0 0 0 -x(:,6)
0;...
0 -x(:,2) 0 +x(:,2) 0 0 0 0; 0 0 0 0 x(:,7)+x(:,8) 0 -x(:,8) 0; 0 -x(:,3) 0 0 0 +x(:,3) 0 0;...
-x(:,4) 0 -x(:,6) 0 -x(:,8) 0 x(:,4)+x(:,9)+x(:,6)+x(:,8) -x(:,9); 0 0 0 0 0 0 -x(:,9) x(:,9)];
M=[m1 0 0 0 0 0 0 0; 0 m1 0 0 0 0 0 0; 0 0 m2 0 0 0 0 0; ...
0 0 0 m2 0 0 0 0; 0 0 0 0 m3 0 0 0; 0 0 0 0 0 m3 0 0;...
0 0 0 0 0 0 m4 0; 0 0 0 0 0 0 0 m5];
C=[x(:,10) 0 0 0 0 0 -x(:,10) 0; 0 0 0 0 0 0 0 0; 0 0 x(:,11)+x(:,12) 0 0 0 -x(:,12) 0;...
0 0 0 0 0 0 0 0; 0 0 0 0 x(:,13)+x(:,14) 0 -x(:,14) 0; 0 0 0 0 0 0 0 0;...
-x(:,10) 0 -x(:,12) 0 -x(:,14) 0 x(:,10)+x(:,12)+x(:,14)+x(:,15) -x(:,15); 0 0 0 0 0 0 -x(:,15) x(:,15)];
sdof=8;
R=[0;0;0;0;0;0;0;0];
A=zeros(16,16);
A1=zeros(8,8);A2=eye(8,8);
A3=-inv(M)*K;A4= -inv(M)*C;
A(1:8,9:16)=A1; A(1:8,9:16)=A2;
A(9:16,1:8)=A3; A(9:16,9:16)=A4;
B=zeros(16,1);
H= eye(16,16);
D= zeros(16,1);
sys=ss(A,B,H,D);
t=[0.:0.00222:0.15];
x0 =[0;0;0;0;0;0;0;0;14;0;14;0;14;0;14;14];
[y,t,X] = initial(sys,x0,t);
VA=sys.A*X';
Dcl=VA(16,:)/9.81;
aexp2 = xlsread('Acc.xls','Acc','B2:B69');
aexp2 = aexp2';
Cost = rms((Dcl-aexp2)/mean(abs(aexp2)));
end
Sous programme Cont_5LH.m
function [c,ceq]=Cont_5LH(x)
c=[];
ceq=[];
68
ANNEXE C
C.1
Programme MATLAB Modele_masses.m
Programme principal
%% Données
%% Chargement du fichier de données (exécution du fichier maplesim)
system('"C:\Program Files\Maple 16\bin.X86_64_WINDOWS\cmaple.exe"
Worksheet_Masses.maplet')
%% Lecture des résultats de Maplesim
A_Sim=xlsread('A_Sim.xls','A_Sim','B1:B67');
%% Lecture des valeurs expérimentales
A_Exp=xlsread('A6.xls','A6','B1:B67');
%% Calcul de l’erreur moyenne quadratique des accélérations
RMS=rms((A_Sim-A_Exp)/mean(abs(A_Exp)));
%% Lecture des paramètres (raideurs et amortissements)
Lim=0.1;
X0(1) =xlsread ('Para2.xls','Par','C20'); % k1
X0(2) =xlsread ('Para2.xls','Par','C21'); % k2
X0(3) =xlsread ('Para2.xls','Par','C22'); % k3
X0(4) =xlsread ('Para2.xls','Par','C23'); % k4
X0(5) =xlsread ('Para2.xls','Par','C24'); % k5
X0(6) =xlsread ('Para2.xls','Par','C25'); % k6
X0(7) =xlsread ('Para2.xls','Par','C26'); % k7
X0(8) =xlsread ('Para2.xls','Par','C27'); % k8
X0(9) =xlsread('Para2.xls','Par','C28'); % k9
X0(10) =xlsread ('Para2.xls','Par','C29'); % k10
X0(11) =xlsread ('Para2.xls','Par','C30'); % c4
X0(12) =xlsread ('Para2.xls','Par','C31'); % c5
X0(13) =xlsread ('Para2.xls','Par','C32'); % c6
X0(14) =xlsread ('Para2.xls','Par','C33'); % c7
X0(15) =xlsread ('Para2.xls','Par','C34'); % c8
X0(16) =xlsread ('Para2.xls','Par','C35'); % c9
X0(17) =xlsread ('Para2.xls','Par','C36'); % c10
%% Définition du vecteur X0, contenant 17 valeurs initiales.
X0=[X0(1) X0(2) X0(3) X0(4) X0(5) X0(6) X0(7) X0(8) X0(9) X0(10) X0(11) X0(12) X0(13)
X0(14) X0(15) X0(16) X0(17)];
%% Nombre de variables
nvars = 17;
69
%% Bornes supérieure et inférieure
LB = [20 1000 1000 1000 20 90 20 1000 1000 10 0.2 100 0.5 300 1000 500 10];
UB = [300 1000000 1000000 1000000 300 300 300 1000000 1000000 100 10 50000 10 10000
…10000000 5000 100]
%% Processus d’optimisation
options = gaoptimset('PopulationSize',50,
'InitialPopulation',X0,'PlotFcns',{@gaplotbestf,@gaplotmaxconstr},...
'Display','iter','FitnessLimit',Lim);
% options = gaoptimset(options,'OutputFcn',@outfun);
%% Fonction objective
FitnessFunction = @masse_fit;
hold on
[xbest,fbest,exitflag,output,final_pop]= ga(@masse_fit,nvars,[],[],[],[],LB,[],@masse_cont,options);
hold off
%% Affichage du résultat
fprintf('\n Les meilleures valeurs sont := %f\n', xbest);
fprintf('\n RMS obtenu: = %f\n', fbest);
Sous programme masse_fit.m
function RMS = masse_fit(x)
% Paramètres à trouver
x=[x(1) x(2) x(3) x(4) x(5) x(6) x(7) x(8) x(9) x(10) x(11) x(12) x(13) x(14) x(15) x(16) x(17)];
% Export des valeurs dans le fichier Excel
xlswrite('Para2.xls',x(1),'Par','C20'); % k1
xlswrite('Para2.xls',x(2),'Par','C21'); % k2
xlswrite('Para2.xls',x(3),'Par','C22'); % k3
xlswrite('Para2.xls',x(4),'Par','C23'); % k4
xlswrite('Para2.xls',x(5),'Par','C24'); % k5
xlswrite('Para2.xls',x(6),'Par','C25'); % k6
xlswrite('Para2.xls',x(7),'Par','C26'); % k7
xlswrite('Para2.xls',x(8),'Par','C27'); % k8
xlswrite('Para2.xls',x(9),'Par','C28'); % k9
xlswrite('Para2.xls',x(10),'Par','C29'); % k10
xlswrite('Para2.xls',x(11),'Par','C30'); % c4
xlswrite('Para2.xls',x(12),'Par','C31'); % c5
xlswrite('Para2.xls',x(13),'Par','C32'); % c6
xlswrite('Para2.xls',x(14),'Par','C33'); % c7
xlswrite('Para2.xls',x(15),'Par','C34'); % c8
xlswrite('Para2.xls',x(16),'Par','C35'); % c9
xlswrite('Para2.xls',x(17),'Par','C36'); % c10
%% Exécution du fichier MAPLE (.maplet)
70
system('"C:\Program Files\Maple 16\bin.X86_64_WINDOWS\cmaple.exe"
Worksheet_Masse.maplet');
%% Lecture des valeurs expérimentales et les résultats de Maplesim
A_Sim=xlsread('A_Sim.xls','A_Sim','B1:B67');
A_Exp=xlsread('A6.xls','A6','B1:B67');
%% Calcul du RMS
RMS=rms((-A_Sim + A_Exp)/mean(abs(A_Exp)));
%% Affichage du résultat
fprintf('\n Root mean square = %f\n', RMS);
if RMS <= 0.1
%
xlswrite('Para2.xls',x(1),'Par','G20');
xlswrite('Para2.xls',x(2),'Par','G21');
xlswrite('Para2.xls',x(3),'Par','G22');
xlswrite('Para2.xls',x(4),'Par','G23');
xlswrite('Para2.xls',x(5),'Par','G24');
xlswrite('Para2.xls',x(6),'Par','G25');
xlswrite('Para2.xls',x(7),'Par','G26');
xlswrite('Para2.xls',x(8),'Par','G27');
xlswrite('Para2.xls',x(9),'Par','G28');
xlswrite('Para2.xls',x(10),'Par','G29');
xlswrite('Para2.xls',x(11),'Par','G30');
xlswrite('Para2.xls',x(12),'Par','G31');
xlswrite('Para2.xls',x(13),'Par','G32');
xlswrite('Para2.xls',x(14),'Par','G33');
xlswrite('Para2.xls',x(15),'Par','G34');
xlswrite('Para2.xls',x(16),'Par','G35');
xlswrite('Para2.xls',x(17),'Par','G36');
%
xlswrite('Para2.xls',RMS,'Par','D42');
%
fprintf('\n paramètres = %f\n', x);
fprintf('\n RMS = %f\n', RMS);
%
stop
%
elseif RMS > 5.0
fprintf('\Mauvais calcul \n');
end
Sous programme masse_cont.m
function [c,ceq]=masse_cont(x)
c=[x(3) - 1206876];
ceq =[x(7) + x(8) - 4761289 ; ...
x(1) + x(4) - 1178744 ; ...
71
end
x(5) + x(6) - 174 ; ...
x(14) + x(15) - 8361 ; ...
x(13) + x(14) - 33117];
Sous programme Maple Worksheet_Masses.maplet
># Appel du modèle Simulink
>
>A := MapleSim:LinkModel('filename'=cat(kernelopts('toolboxdir'=MapleSim),kernelopts('dirsep'),"data/exam
ples/Modele_masses.msim")):
># Import des paramètres du fichier Excel Para2.xls
>
>
># Modification des paramètres MapleSim
>
>
>
># Export des résultats au fichier Excel A_Sim.xls
>
72
C.2
Programme MATLAB Modele_bielles.m
Programme principal
%% Données
%% Chargement du fichier de données (exécution du fichier maplesim)
system('"C:\Program Files\Maple 16\bin.X86_64_WINDOWS\cmaple.exe"
Worksheet_Bielle.maplet')
%% Lecture des résultats de Maplesim
A_Sim=xlsread('A_Sim.xls','A_Sim','B1:B67');
%% Valeurs expérimentales
A_Exp=xlsread('A6.xls','A6','B1:B67');
% % Calcul du RMS
RMS=rms((A_Sim-A_Exp)/mean(abs(A_Exp)));
%% Algorithme génétique
Lim=0.1;
X0(1) =xlsread('Para.xls','Par','C20'); % k1
X0(2) =xlsread('Para.xls','Par','C23'); % k4
X0(3) =xlsread('Para.xls','Par','C24'); % k5
X0(4) =xlsread('Para.xls','Par','C26'); % k7
X0(5) =xlsread('Para.xls','Par','C27'); % k8
X0(6) =xlsread('Para.xls','Par','C28'); % k9
X0(7) =xlsread('Para.xls','Par','C30'); % c4
X0(8) =xlsread('Para.xls','Par','C31'); % c5
X0(9)=xlsread('Para.xls','Par','C33'); % c7
X0(10)=xlsread('Para.xls','Par','C34'); % c8
X0(11)=xlsread('Para.xls','Par','C35'); % c9
X0(12)=xlsread('Para.xls','Par','C29'); % k10
X0(13)=xlsread('Para.xls','Par','C38'); % k11
X0(14)=xlsread('Para.xls','Par','C36'); % c10
X0(15)=xlsread('Para.xls','Par','C37'); % c11
X0(16)=xlsread('Para.xls','Par','C39'); % ma
X0(17)=xlsread('Para.xls','Par','C40'); % mb
%% Définition du vecteur X0, contenant 17 valeurs initiales.
X0=[X0(1) X0(2) X0(3) X0(4) X0(5) X0(6) X0(7) X0(8) X0(9) X0(10) X0(11) X0(12) X0(13)
X0(14) X0(15) X0(16) X0(17)];
% Nombre de variables
nvars = 17;
%% Bornes supérieure et inférieure
73
LB = [20 1000 20 20 3000000 10000 0.1 1000 5000 100000 500 ...
100000 100000 2000 2000 540 700];
UB = [60 1200000 40 40 4800000 390000 0.9 34000 6800 8700000 1600 ... 1000000 1000000 6000
6000 540 700];
%% Processus optimisation
options = gaoptimset('PopulationSize',50,'PlotFcns',{@gaplotbestf,@gaplotmaxconstr},...
'Display','iter','FitnessLimit',Lim,'InitialPopulation',X0);
% options = gaoptimset(options,'OutputFcn',@outfun);
%% Fonction objective
FitnessFunction = @Bielle_fit;
%%
[xbest,fval] = ga(@Bielle_fit,nvars,[],[],[],[],LB,[],@Bielle_cont,options);
% hold on
% [xbest,fbest,exitflag,output,final_pop]= ga(@Bielle_fit,nvars,[],[],[],[],LB,UB,[],options);
% hold off
%% Affichage des résultats
fprintf('\n Les meilleures valeurs sont : = %f\n', xbest);
fprintf('\n RMS obtenu = %f\n', fval);
Sous programme Bielle_fit.m
function RMS = Bielle_fit(x)
% Paramètres a trouver
x=[x(1) x(2) x(3) x(4) x(5) x(6) x(7) x(8) x(9) x(10) x(11) x(12) x(13) x(14) x(15) x(16) x(17)];
% Export des valeurs dans le fichier Excel
xlswrite('Para.xls',x(1),'Par','C20'); % k1
xlswrite('Para.xls',x(2),'Par','C23'); % k4
xlswrite('Para.xls',x(3),'Par','C24'); % k5
xlswrite('Para.xls',x(4),'Par','C26'); % k7
xlswrite('Para.xls',x(5),'Par','C27'); % k8
xlswrite('Para.xls',x(6),'Par','C28'); % k9
xlswrite('Para.xls',x(7),'Par','C30'); % c4
xlswrite('Para.xls',x(8),'Par','C31'); % c5
xlswrite('Para.xls',x(9),'Par','C33'); % c7
xlswrite('Para.xls',x(10),'Par','C34'); % c8
xlswrite('Para.xls',x(11),'Par','C35'); % c9
xlswrite('Para.xls',x(12),'Par','C29'); % k10
xlswrite('Para.xls',x(13),'Par','C38'); % k11
xlswrite('Para.xls',x(14),'Par','C36'); % c10
xlswrite('Para.xls',x(15),'Par','C37'); % c11
xlswrite('Para.xls',x(16),'Par','C39'); % ma
xlswrite('Para.xls',x(17),'Par','C40'); % mb
74
%% Exécution du fichier MAPLE (.maplet)
system('"C:\Program Files\Maple 16\bin.X86_64_WINDOWS\cmaple.exe"
Worksheet_Bielles.maplet')
%% Lecture des valeurs expérimentales et les résultats de Maplesim
A_Sim=xlsread('A_Sim.xls','A_Sim','B1:B67');
A_Exp=xlsread('A6.xls','A6','B1:B67');
%% Calcul du RMS
RMS=rms((-A_Sim + A_Exp)/mean(abs(A_Exp)));
%%Affichage du résultat
fprintf('\n Root mean square = %f\n', RMS);
%%
if RMS <= 0.1
%
fprintf('\n You got it baby \n');
fprintf('\n parameters = %f\n', x);
fprintf('\n RMS = %f\n', RMS);
%
xlswrite('Para.xls',x(1),'Par','G20');
xlswrite('Para.xls',x(2),'Par','G23');
xlswrite('Para.xls',x(3),'Par','G24');
xlswrite('Para.xls',x(4),'Par','G26');
xlswrite('Para.xls',x(5),'Par','G27');
xlswrite('Para.xls',x(6),'Par','G28');
xlswrite('Para.xls',x(7),'Par','G30');
xlswrite('Para.xls',x(8),'Par','G31');
xlswrite('Para.xls',x(9),'Par','G33');
xlswrite('Para.xls',x(10),'Par','G34');
xlswrite('Para.xls',x(11),'Par','G35');
xlswrite('Para.xls',x(12),'Par','G29');
xlswrite('Para.xls',x(13),'Par','G38');
xlswrite('Para.xls',x(14),'Par','G36');
xlswrite('Para.xls',x(15),'Par','G37');
xlswrite('Para.xls',x(16),'Par','G39');
xlswrite('Para.xls',x(17),'Par','G40');
%
xlswrite('Para.xls',RMS,'Par','D42');
stop
elseif RMS > 5.0
fprintf('\n Mauvais calcul\n');
end
75
Sous programme Bielle_cont .m
function [c,ceq] = Bielle_cont(x)
c =[x(8) - 33115; x(9) - 6765];
ceq = [x(3) + x(1) - 85.58; ...
x(4) + x(1) - 87.6; ...
x(5) + x(2) - 5939944.23; ...
x(10) + x(7) - 8648278.51; ...
x(12) - x(13); ...
x(14) - x(15); ...
x(16) - 570;...
x(17) - 700];
%
end
Sous programme Maple Worksheet_Bielles .maplet
># Appel du modèle Simulink
>
>A := MapleSim:LinkModel('filename'=cat(kernelopts('toolboxdir'=MapleSim),kernelopts('dirsep'),"data/exam
ples/Modele_bielles.msim")):
># Import des paramètres du fichier Excel Para.xls
>
>
># Modification des paramètres MapleSim
>
>
>
># Export des résultats au fichier Excel A_Sim.xls
>
76
BIBLIOGRAPHIE
[1]
Global status report on road safety 2013: supporting a decade of action. World Health
Organisation, Switzerland.
[2]
Fatality Reduction by Safety Belts for Front-Seat Occupants of Cars and light trucks.
DOT HS 809 199, NHTSA Technical Report. Washington, United States.
[3]
Canada’s Road Safety Strategy 2015, Canadian council of Motor Transport
Administrators, Ottawa, Ontario.
[4]
J. McQuaid and N. Jones, “A re-examination of Andrews research on impact resistance of
railway axles”. International Journal of Impact Engineering 22(7), pp727-738, 1999.
[5]
U. Seiffert and L. Wech, Automotive safety handbook, SAE International, arrendale, Pa.,
2007.
[6]
R. A. Galganski, " Crashworthiness design of HSGGT vehicles " in Proc.IEEE/ASME Joint
Railroad Conference, pp. 121-130, 1993.
[7]
S. Natori and Q. Yu, «An Application of CAP (Computer-Aided Principle) to Structural
Design for Vehicle Crash Safety", SAE Technical paper 2007-01-0882, 2007.
[8]
" Federal motor vehicle safety standards and regulations,
http://www.nhtsa.dot.gov/cars/rules/import/fmvss/index.html", accessed on May 2009.
[9]
" European regulations related to crash testing, http://www.crashnetwork.com/regulations/eceregulations/ece-regulations.html," accessed on May 2009.
[10]
FHWA/NHTSA National Crash Analysis Center, Finite element model of Dodge Neon,
University of George Washington.http://www.ncac.gwu.edu/vml/models.html
[11]
" National Highway Traffic Safety Administration (NHTSA) | U.S. department of
transportation, http://www.nhtsa.gov/ ", accessed on May 2009.
[12]
M. M. Kamal, «Analysis and Simulation of Vehicle to Barrier Impact," SAE Technical Paper
700414, 1970.
[13]
C. L. Magee, " Design for crash energy management, present and future developments," in
Seventh International Conference on Vehicle structural mechanics, (Detroit, Michigan, USA),
1988.
[14]
Gabriela K. DeFrancisci, Zhi M. Chen, and Hyonny Kim, the University of California, San
Diego.2011.Transportation Research Record: Journal of the Transportation Research Board,
No. 2206.
77
[15]
J.Marzbanrad, M.Pahlavani, "A System Identification Algorithm for Vehicle Lumped
Parameter Model in Crash Analysis", International Journal of Modeling and optimization,Iran
University of Science and Technology, Tehran, Iran.
[16]
" PAM-CRASH, http://www.esi-group.com/products/crash-impactsafety/pam-crash" accessed
on May 2009.
[17]
" LS-DYNA, http://www.lstc.com/lsdyna.htm," accessed on May 2009.
[18]
" ABAQUS, http://www.simulia.com/products/abaqus fea.html," accessed on May 2009.
[19]
R. R. McHenry, "Analysis of the Dynamics of Automobile Passenger-Restraint Systems," in
Stapp Car Crash and Field Demonstration Conference, pp. 207-248, 1963.
[20]
R. Happee, A. Janssen, E. Fraterman, J. Monster, and R. Happee, " Application of MADYMO
Occupant Models in LS-DYNA/MADYMO Coupling," in 4th European LS-DYNA Users
Conference, pp. 3-10, 2003.
[21]
S. Figgins, «Biomechanics and the Cyberhuman," IEEE Computer Graphics and Applications,
pp. 14-20, 2002.
[22]
M. Iwamoto, Y. Kisanuki, I. Watanabe, K. Furusu, K. Miki, and J. Hasegawa,
" Development of a Finite Element Model of the Total Human Model for Safety (THUMS)
and Application to Injury Reconstruction," in Proceedings of the 2002 IRCOBI International
Conference The BRIDGE, pp. 31- 42, 2002.
[23]
Hesham Kamel Ibrahim. Phd, Design Optimization of Vehicle Structures for Crashworthiness
Improvement, Concordia University, 2009, Montreal, Canada.
[24]
http://www.radio.rai.it/cpu/archivio_2005/eventi/ERF.pdf, The European Union Road
Federation (ERF), „The dynamics of vehicle – guardrail collisions and their impact on
occupant safety‟, ERF information brief, October 2005.
[25]
G. Toganel and A. Soica, Aspects Regarding the Impact Speed, AIS and HIC relationship
for Car-Pedestrian Traffic Accidents‟, Published in ANNALS of the Oradea University,
Fascicle of Management and Technological Engineering, Vol. VI (XVI), 2007.
[26]
J. T. Wang, An extendable and retractable bumper‟, 19th International Technical
Conference on the Enhanced Safety of Vehicles, Paper #: 05-0144, 2005
[27]
Dr M.J. Richard, ‘ Dynamique des Solides ‘, département du génie mécanique, Université
Laval, Québec.
Dr H.K.Ibrahim,’ Design Optimization of Vehicle Structures for Crashworthiness
Improvement’, Concordia University, Montreal, Quebec, Canada.
[28]
78
© Copyright 2026 Paperzz