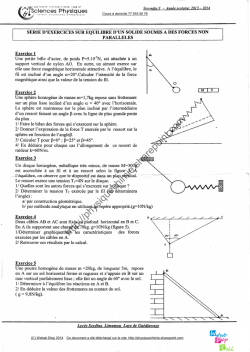
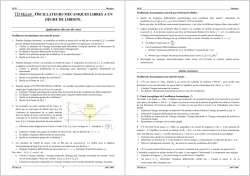
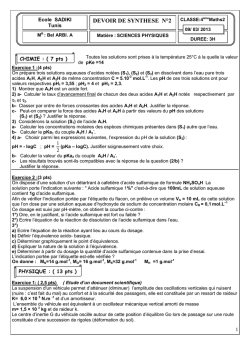
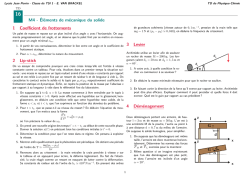
Exercices 1 Associations de ressorts 1. On assimile la double roue de certains véhicules à deux ressorts semblables en parallèle (figure1.(a)) de constante de raideur k et de longueur à vide l0 . Déterminer les caractéristiques (k e , le0 ) du ressort équivalent. On note M la masse du véhicule appuyant sur l’ensemble des deux ressorts. 2. Maintenant, si l’on s’intéresse seulement à une roue et son amortisseur (sans tenir compte du système d’amortissement visqueux), on peut assimiler l’ensemble à deux ressorts K1 , l01 et K2 , l02 en série(figure 6.1.(b)). Déterminer les caractéristiques du ressort équivalent. On note M la masse du véhicule appuyant sur l’ensemble des deux ressorts et A le point de masse nulle entre les deux ressorts. F I G U R E1 – ressorts en parallèles (a), ressorts en série (b) 2 Ressorts et Poulies Soit un système constitué de deux ressorts de caractéristiques ( K1 , l01 ) et(K2 , l02 ) et de deux poulies A et B reliés par un fil inélastique comme c’est indiqué sur la figure2. Sous l’effet de la masse M , l’extrémité du fil s’allonge de la quantité x0 à partir de la position à vide (prise comme origine des abscisses). 1. Exprimer, x01 et x02 les déplacements des centres des poulies A et B à partir de leurs positions à vide, en fonction deK1 , K2 , M et g. En déduire x0 . On remplace ce système par un seul ressort équivalent, de raideur Ke et de longueur à vide l0 . Exprimer Ke en fonction de K1 et K2 . Conclusion. 2. On écarte la masse de sa position d’équilibre, établir l’équation différentielle du mouvement (on prendra comme origine des abscisses l’extrémité fixe du ressort équivalent). Chercher les solutions dans les cas suivants : (a) On accroche la masse M au ressort et on la lâche (à t=0) sans vitesse initiale 59 3. ÉTUDE D’UN OSCILLATEUR À L’AIDE DE SON PORTRAIT DE PHASE. EXERCICES FIGURE 2 (b) On accroche la masse M au ressort et on la libère à l’instant t = t0 , en la poussant avec une vitesse initiale v0 . 3 Étude d’un oscillateur à l’aide de son portrait de phase On fait l’étude d’un oscillateur M de masse M = 0, 2 kg astreint à se déplacer suivant l’axe Ox de vecteur unitaire e~x . Il est soumis uniquement aux forces suivantes : – la force de rappel d’un ressort de caractéristiques (K, l0 ). – une force de frottement visqueux : ~fv = −αxe~x – une force constante F~C = FC e~x 1. (a) Établir l’équation différentielle du mouvement de M et la mettre sous la forme : x¨ + ω0 x˙ + ω 20 = ω 20 X0 Q où x est l’allongement du ressort (par rapport à l0 ). Les grandeurs ω0 , Q et x0 sont à exprimer en fonction des données. (b) Dans le cas d’une solution pseudo-périodique, chercher l’expression de x(t) solution de l’équation ci dessous, on définira le temps caractéristique τ et la pseudo-pulsation Ω que l’on exprimera en fonction de ω0 et Q. 2. Le portrait de phase (v(t) = x˙ , x(t)) de l’oscillateur étudié est donné sur la figure (3 ) On souhaite pouvoir en tirer les valeurs des différents paramètres de l’oscillateur. (a) Quel est le type de mouvement ? (b) Déterminer la vitesse et l’élongation au début et à la fin du mouvement (c) Déterminer la vitesse maximale atteinte ainsi que l’élongation maximale. (d) On donne les différentes dates correspondant aux croisements de la trajectoire de phase avec l’axe des abscisses : t(s) 0,31 0,65 0,97 1,3 1,62 En déduire le pseudo-période T et la pseudo-pulsation ω. UNIVERSITÉ IBN TOFAIL 60 J.DIYADI 4. PROBLÈME EXERCICES F I G U R E 3 – diagramme de phase (e) On définit le décrément logarithmique par 1 x(t) −x B (t) δ = ln n x(t + nT) − x B (t) où x(t) sont les élongations aux instants t et t + nT (n entier naturel) et x B l’élongation finale de M. Exprimer δ en fonction de T et τ. En choisissant une valeur de n la plus grande possible pour les données dont on dispose, déterminer δ puis τ. (f) Déduire des résultats précédents le facteur de qualité Q et la pulsation propre ω0 . (g) Déterminer la raideur du ressort K, le coefficient de frottement α et la force FC sachant que l0 = 1 cm. 4 Problème FIGURE 4 On se propose d’étudier le comportement vibratoire de matériaux en caoutchouc (figure4 (a)). en vue de leur utilisation dans la construction. UNIVERSITÉ IBN TOFAIL 61 J.DIYADI 4. PROBLÈME (DEVOIR LIBRE) EXERCICES Pour leur modélisation, nous assimilons l’élasticité du matériau à celle d’un ressort de raideur k et les pertes énergétiques par frottement à celles ayant lieu dans un amortisseur de coefficient de frottement α. Le ressort et l’amortisseur ainsi considérés sont associés en parallèle (figure 4 (b)). On suppose, de plus, que le poids du caoutchouc est négligeable devant les forces mises en jeu. 1. On place une masse m = 1 t sur un bloc en caoutchouc qui se comprime, alors, d’une distance d. Après une compression supplémentaire, la masse m relâchée prend un mouvement oscillatoire amorti autour de sa position d’équilibre que l’on repère par la coordonnée y. On mesure l’intervalle de temps, ∆t séparant le 1er et le 6ème maximum. On trouve ∆t = 0, 2 s . La diminution d’amplitude correspondante est de 60%. (a) Etablir l’équation différentielle du mouvement de la masse m. (b) Donner la forme générale de la solution y(t). Comment varie l’amplitude des oscillations ? (c) Déduire de ce qui précède les valeurs de k et α. (d) On refait la même expérience avec un autre caoutchouc. On trouve α = 4, 5103 kg.s−1 . Au bout de combien de temps, ∆t0 , obtient-on la même diminution d’amplitude que dans l’expérience précédente ? (e) Quel est le matériau le plus approprié pour la construction ? 2. Un caoutchouc avec les paramètres physiques k = 25.106 N.m−1 et α = 104 kg.s−1 est, à présent, utilisé dans la construction d’un pont d’autoroute, de masse M = 12, 5 t. On assimile l’effet du passage des véhicules le pont à celui d’une force sinusoïdale d’amplitude F0 = 103 N et de fréquence f , appliquée perpendiculairement au pont (Fig.5). FIGURE 5 (a) Ecrire l’équation du mouvement du pont pour la coordonnée y donnant son déplacement par rapport à l’équilibre. (b) Donner l’expression du déplacement, y(t), en régime permanent, en fonction de la fréquence. (c) Quelle est la fréquence de résonance, f r du pont ? Montrer qu’on peut l’assimiler â sa fréquence propre f 0 . 3. En déduire l’amplitude maximale à laquelle le pont peut vibrer. Quelle est la phase correspondante ? 4. Calculer l’énergie communiquée au pont pendant un intervalle de temps égal à une période, lorsque le passage des véhicules le fait vibrer à la résonance. 5. Calculer l’énergie correspondante qui se dissipe dans l’amortisseur, pendant le même intervalle de temps. Conclusion ? UNIVERSITÉ IBN TOFAIL 62 J.DIYADI 5. ETUDE DE LA RÉSONANCE( TP 2èmeSÉANCE ) 5 EXERCICES Etude de la résonance( TP 2èmeséance ) FIGURE 6 Une masse m = 0, 1kg accrochée l’extrémité R d’un ressort de raideur k = 20N/m peut se déplacer sur un axe horizontale. On admettra que les frottements se réduisent à une force ~f = −α~v où désigne la vitesse instantanée de la masse m. Le coefficient α est positif. 1. Oscillations libres amorties L’extrémité E est fixe. (a) Etablir l’équation différentielle caractéristique du mouvement du corps. (b) Chercher les solutions x(t) et v(t) selon la valeur du coefficient d’amortissement. • α = 5kg/s (régime apériodique) • α = 0, 4kg/s (régime pseudo-périodique) • α = 2, 828kg/s On notera k α 2λ = ω02 = ; m m A.N À t = 0 , x = x0 = 0, 05cm , v = v0 = 0, 25m/s 2. Oscillations forcées Le point E effectue des oscillations sinusoïdales xe = a0 sin Ω autour de sa position d’équilibre 3. Chercher les solutions de x(t) 4. Déterminer les maximums de x(t) et de v(t) 5. Déterminer la bande passante ∆Ω 6. Le coefficient de surtension Q 6 Modélisation d’un amortisseur On considère l’amortisseur d’un véhicule (figure. 7). Chaque roue supporte un quart de la masse de la voiture assimilé à un point M de masse m = 500 kg et est reliée à un amortisseur dont le ressort a une constante de raideur k = 2, 5.104 N.m −1 . Le point M subit aussi un frottement visqueux ~fv = −α~v où ~v est la vitesse de M et α = 5.103 kg.s −1 . Le véhicule franchit à vitesse constante un défaut de la chaussée de hauteur h = 5 cm. Son inertie est suffisante pour qu’il ne se soulève pas immédiatement mais acquiert une vitesse verticale v0 = 0, 5 m.s− 1. On pose : α λ= 2m On note Zi la cote du point M avant le passage du défaut. 1. (a) On note Z(t) la cote de M. Établir l’équation différentielle pour Z après le passage de l’obstacle. Déterminer Z(t) en fonction des données. On remarquera que λ = Ω où Ω est la pseudo-pulsation. (b) Les passagers sont sensibles à l’accélération verticale de la voiture, calculer sa valeur maximale. On utilisera le fait que λ = Ω UNIVERSITÉ IBN TOFAIL 63 J.DIYADI 7. SISMOGRAPHE EXERCICES F I G U R E 7 – amortisseur 2. Il faut en fait éviter des oscillations susceptibles de provoquer chez les passagers le mal des transports, en se plaçant dans les conditions critiques. Pour quelle masse par roue est-ce réalisé, K et l étant inchangés ? 7 Sismographe On considère l’appareil schématisé figure 8. Il est constitué d’un ressort de raideur K auquel est suspendu une masse m de centre de masse M. La masse subit par l’intermédiaire d’un système d’amortissement (qu’on ne représentera pas sur la figure) une force de frottement proportionnelle à sa vitesse ~v par rapport à la carcasse métallique que l’on notera : le support C ~f = −α~v ( f > 0) Le mouvement de la masse m par rapport au support C s’inscrit grâce à un stylet sur un enregistreur (un tambour). On étudie ce mouvement lorsque C prend, par rapport au repère terrestre supposé galiléen, un mouvement F I G U R E 8 – sismographe connu de direction verticale. 1. Expliquer qualitativement pourquoi, dans le cas de vibrations verticales rapides de C, le stylet reproduit ces vibrations en vraie grandeur sur le tambour. 2. (a) Pour l’étude des mouvements on utilise un axe vertical (z0 z) lié à la terre et orienté vers le haut. On appelle zo (t) la cote sur cet axe à la date t du point de C coïncidant avec M à l’équilibre et z(t) = zo (t) + y(t) la cote du point matériel M. Former l’équation différentielle vérifiée par y(t). (b) On a z0 (t) = Z0 cos Ωt et on cherche y(t) en régime stationnaire sous la forme : y(t) = Y cos(ωt + ϕ) Y>0 Y en fonction de : En utilisant la notation complexe, déterminer R = Z 0 r Ω mω0 K x = et Q = (pulsation propre des oscillations libres non où ω0 = ω0 m α amorties) 3. A partir de quelle valeur Q1 et de Q la fonction R(x) passe-t-Comment choisir Q1 pour que le domaine des pulsations pour lesquelles R ' 1 soit le plus étendu possible ? UNIVERSITÉ IBN TOFAIL 64 J.DIYADI 8. COUPLAGE DE 3 RESSORTS 8 EXERCICES Couplage de 3 ressorts (session rattrapage 2012) Entre le plafond en A , et le sol en B, sont accrochées en alignement vertical deux masses identiques m grâce à trois ressorts. Le ressort central est de raideur K0 , les deux autres sont de raideur K. 1. Si T est la tension du ressort central à l’équilibre, qui est étiré (allongé). Quelle est la tension du ressort supérieur, (a) En absence de pesanteur ? (b) En présence de pesanteur g ? 2. Même question pour le ressort inférieur. 3. Dans la suite, on ne considérera que des mouvements verticaux, repérés par des déplacements x1 et x2 des masses, par rapport à l’équilibre. (a) Écrire les équations du mouvement et montrer qu’elles peuvent se meF ttIrGe UsRous l9a E forme ( x¨1 + Ax1 = Bx2 x¨2 + Ax2 = Bx1 avec A > 0 et B > 0 (b) Donner les expressions de A et B en fonction de m, K et K0 . (c) Proposer un schéma électrique équivalent 4. Montrer que deux combinaisons linéaires indépendantes de x1 et x2 sont solutions d’équations d’évolution découplées. Donner l’expression des pulsations propres. Observera-t-on des battements ? si oui donner l’expression de la période des battements. 5. Donner la loi horaire x1 (t) correspondant aux conditions initiales : x1 (0) = b, x2 (0) = x1 (˙ 0) = x2 (˙ 0) = 0 où b est un petit déplacement initial. Représenter l’allure de x(t). 6. On applique à chacune des masses une même force supplémentaire de mesure algébrique √ Fm cos 2 At (a) Proposer un schéma électrique équivalent (b) Quelle est la forme de la solution générale pour x1 + x2 et pour x1 − x2 ? 7. En présence de ces forces, quelle sera la solution x1 (t) si on adopte les mêmes conditions initiales que précédemment x1 (0) = b, x2 (0) = x1 (˙ 0) = x2 (˙ 0) = 0 9 Oscillateurs couplés A) Oscillateurs couplés en régime libre Une corde de longueur L tendue entre les points fixes O et A de l’axe vertical Oz porte en M1 et M2 deux masses identiques m inégalement espacés, comme indiqué sur la figure . On supposera que les angles αi sont petits et que les déplacements x1 et x2 des deux masses sont de faible amplitude et selon l’axe Ox. 1. On suppose que la tension de la corde garde un module constant T , très grand devant le poids des masses, que l’on négligera. Ecrire, à partir de la relation fondamentale de la dynamique, les équations du mouvement des masses en fonction des variables α1 , α2 , α3 . UNIVERSITÉ IBN TOFAIL 65 J.DIYADI 9. OSCILLATEURS COUPLÉS EXERCICES F I G U R E10 2. Exprimer les variables α1 , α2 et α3 en fonction de x1 et x2 , en précisant les approximations faites, puis montrer que lesréquations du mouvement peuvent s’écrire, en fonction des T variables x1 , x2 et de ω0 = sous la forme : mL ( x¨1 + ω 02 (5x1 − 2x2 ) = 0 x¨2 + ω20 (−2 + 8x2 ) = 0 3. On cherche des solutions sinusoidales sous la forme complexe : x1 = a1 e jωt ; x2 = a2 e jωt r T mL 4. En déduire les modes propres du système, puis en donner une représentation graphique. Déterminer les pulsations propres du systéme en fonction de ω0 = 5. Donner l’expression la plus générale pour le mouvement des masses en notation réelle. 6. Ce mouvement est-il périodique ? Si oui donner sa période en fonction de ω0 . 7. Au temps t = 0 les deux masses sont lâchées sans vitesse initiale depuis les positions x1 = 0 et x2 = 0. Déterminer les lois du mouvement réelles x1 (t) et x2 (t). B) Oscillateurs couplés en régime forcé On reprend le système de la partie A) mais on applique maintenant à la masse dont la position d’équilibre est M , une force sinudoidale selon Ox : F = F0 cos(ωt)~ex 1. Expliquer qualitativement la différence principale entre le régime d’oscillations libres et le régime d’oscillations forcées pour un système d’oscillateurs couplés. 2. Ecrire, avec les memes approximations que pour la partie A), les équations du mouvement en fonction des variables x1 et x2 . UNIVERSITÉ IBN TOFAIL 66 J.DIYADI 10. COUPLAGE DE PENDULES SIMPLES IDENTIQUES EXERCICES 3. On cherche des solutions sinusodales sous la forme complexe : x1 = a1 e jωt , x2 = a2 e jωt r Déterminer les amplitudes a1 et a2 en fonction de ω et ω0 = l’expression complexe de la force excitatrice : T . Pour cela on utilisera mL F = F0 e jωt 4. Expliquer qualitativement ce qu’il se passe lorsque la pulsation de la force excitatrice devient égale à l’une des pulsations propres trouvées en A). Les singularités observées ont-elles un sens physique ? Qu’en est-il dans la réalité en présence de forces de frottement ? 10 Couplage de pendules simples identiques On considère trois pendules simples identiques de masse m, de longueur l. Les masses reliées entre elles par l’intermédiaire de deux ressorts de raideur k1 et k2 . A l’équilibre les pendules F I G U R E11 – Pendule couplés par des ressorts sont verticaux, les trois masses sont équidistantes sur une même horizontale, les ressorts ont leur longueur naturelle. Le système en mouvement est défini par les élongations angulairesθ1 , θ2 et θ3 des pendules avec la verticale descendante on posera : ω 02 = k m et Ω02 = g l k1 = k et k2 = 0 1. Établir l’équation différentielle caractéristique du mouvement du corps. 2. Comparer à l’exercice précèdent 3. Chercher les solutions pour les conditions initiales suivantes : à t = 0 on a θ1 = 0 ; θ2 = θ0 ; θ˙1 = θ˙2 = 0 k1 = k2 = k 4. Écrire les équations différentielles des petites oscillations du système 5. Déterminer les pulsations propres. UNIVERSITÉ IBN TOFAIL 67 J.DIYADI 11. COUPLAGE RESSORT-PENDULE (1) 11 EXERCICES couplage ressort-pendule (1) On considère un pendule constitué d’une tige de longueur l rigide de masse négligeable. Elle peut tourner librement sans frottement autour d’un axe ∆ passant par son extrémité supérieure O. À l’extrémité inférieure M est fixée une masse m que l’on suppose ponctuelle. Par ailleurs, ce pointM est relié à deux ressorts identiques (k, l0 ) eux-mêmes accrochés à des points symétriques A et B de façon que lorsque l’ensemble est en équilibre la tige O M est verticale. On écarte très légèrement le système de cette position d’équilibre. En appliquant le théorème du moment cinétique en O, montrer que le mouvement est harmonique et que la péF I G U R E 12 – couplage penduleriodes des petites oscillations s’écrit : ressort r 2π g 2k + l m couplage ressort-pendule (2) Dans le montage représenté sur la figure ci-contre, une tige de masse M et de longueur l peut osciller sans frottement autour du point fixe O. Son moment d’inertie J par rapport à O est 1 J = Ml 2 et son centre de masse G est situé au milieu de la tige. 3 La position de cette barre est repérée par l’angle θ comme indiqué sur la figure. Cette tige est couplée par l’intermédiaire d’un ressort horizontal de raideur kC au système oscillant constitué M du chariot de masse m = et du ressort de raideur k dont F I G U R E 13 – couplage 3 0 l’extrémité O est fixe. A l’équilibre, le pendule est vertical et pendule-ressort les deux ressorts ont leur longueur naturelle (ressorts non déformés). On posera : r r r k 3g kC ; ωc = ; ω2 = ω1 = 2l m m Les déplacements x1 (t) du centre de masse G du chariot et x2 (t) de l’extrémité A du pendule, à partir de leur position d’équilibre, sont suffisamment petits pour admettre que les deux ressorts demeurent pratiquement horizontaux. Pour les applications numériques on prendra les valeurs suivantes : g = 9, 81ms −1 ; l = 0, 67m ; m = 0, 10kg et k = kc = 1N.m −1 1. système couplé On s’intéresse tout d’abord au chariot et au pendule isolés, c’est à dire non couplés par l’intermédiaire du ressort de raideur k c . (a) A l’aide de la relation fondamentale de la dynamique de translation, écrire l’équation différentielle en x1 (t) du mouvement du chariot. Déterminer la pulsation propre du mouvement et la période propre T1 (on effectuera les applications numériques) (b) A l’aide de la relation fondamentale de la dynamique de rotation, écrire l’équation différentielle en θ(t) du mouvement du pendule dans l’approximation des petits angles. Déterminer la pulsation propre du mouvement et la période propre T2 (on effectuera les applications numériques) 2. Oscillations libres et modes propres du système couplé. (a) Quelle est la relation entre x1 (t) et θ dans l’approximation des petits angles ? UNIVERSITÉ IBN TOFAIL 68 J.DIYADI 12. COUPLAGE RESSORT-BARRE (1) EXERCICES (b) Montrer que les deux équations différentielles du mouvement en x1 (t) et x2 (t) s’écrivent sous la forme : d 2 x1 + (ω12 + ωc2)x1 − ωc2 x2 = 0 dt2 et d 2 x2 + (ω22 + ωc2 )x2 − ωc2 x1 = 0 dt2 (c) établir l’équation aux pulsations propres. Pour en simplifier l’écriture, on utilisera : 0 0 et ω22 = ω22 + ωc2 ω12 = ω12 + ωc2 (d) Quelles sont les liaisons entre les deux oscillateurs quand kc = 0 et quand kc → ∞ ? dire brièvement ce qu’on observe lorsqu’on produit des oscillations. (e) Donner les solutions Ω0 et Ω” de l’équation aux pulsations propres en fonction de 0 0 ω12 et ω22. On prendra Ω0 < Ω”. Calculer numériquement Ω0 et Ω”. Les comparer à 02 02 ω1 et ω2 . 12 Couplage ressort-barre (1) On considère le système mécanique ci-contre constitué d’une tige de longueur L et de masse négligeable pouvant tourner dans un plan vertical autour de son axe fixe ∆. Le point A est relié à un bâti fixe par un amortisseur de coefficient de frottement visqueux α. A l’autre extrémité de la tige est fixée une masse ponctuelle M qui est reliée à un second bâti fixe par un ressort de raideur K. On se place dans le cas des oscillations libres de faible amplitude. F I G U R E 14 – couplage ressort-barre 1. Etablir l’équation différentielle du mouvement satisfaite par θ 2. Lorsque le système est abandonné sans vitesse initiale, il effectue des oscillations amorties de période T = 0.1 s, dont l’amplitude diminue de moitié au bout de 5 périodes. Calculer le coefficient d’amortissement α sachant que M = 0.5 kg. 13 Couplage ressort-barre (2) (Extrait contrõle (2012)) Soit une barre (AB), homogène, de centre de gravité O fixe, de masse m et de longueur 2L, placée dans le champ de pesanteur, comme l’indique la figure ci contre. On envisage les petites oscillations de la barre ( AB) dans le plan vertical fixe (Ox, Oy) autour de son centre de gravité O. Le moment d’inertie de la barre est J, un amortisseur de coefficient α applique sur la barre une force de frottement proportionnelle à la vitesse au point A, à l’équilibre la longueur du ressort est l0 = h. F I G U R E 15 – couplage ressortbarre 1. θ étant l’angle que fait la barre avec l’axe Ox (a) établir l’équation différentielle relative au mouvement de la barre (b) discuter, selon les valeurs de α , les différentes solutions possibles de cette équation à t = 0 θ(0) = 0 θ˙ = 0 UNIVERSITÉ IBN TOFAIL 69 J.DIYADI 6.14. COUPLAGE RESSORT-BARRE (2) CHAPITRE 6. EXERCICES (c) dans le cas du régime pseudo-périodique, préciser la pseudo-période T et le décrément logarithmique δ en fonction des données. 2. On applique une force verticale sinusoïdale F = F0 cos(Ωt) au point B et on néglige les frottements. (a) Réécrire l’équation différentielle du mouvement et chercher la solution en régime permanent sous forme de θ(t) = A(Ω) cos(Ωt + Φ(Ω)) , A(Ω) et Φ(Ω) sont à déterminer en fonction des données (b) Quelle est la pulsation de résonance ? Représenter les allures de A(Ω) et Φ(Ω) (c) Pour quelles valeurs de Ω, la valeur de A(Ω) devient inférieure à 5% de A(Ω = 0) (d) On remplace la barre (AB) par une masse ponctuelle M attachée au point B. Quelle doit être la valeur de M si on veut garder exactement le même mouvement de l’ex1 trémité B ? ( j = mL2 ) 3 (e) Quelle est l’analogie électrique de ce système ? 14 Couplage ressort-barre (2) (Extrait contrõle terminal(2013)) On considére une barre de longueur O A = 2L et de masse m1 . On notera J son moment d’inertie par rapport à O. Deux ressorts de raideurs k1 et k2 sont accrochés à la barre aux points A et G, ce dernier point est situé au milieu de O A (OG = L). Une masse m2 est accrochée à l’extrémité du ressort 2. A léquilibre : F I G U R E 16 θ = x = x1 = x2 = 0 . 1. µ est la masse lineique de la barre. La barre est homogene de masse m1 et de longueur 2L, calculer le moment d’inertie I 2. A l’équilibre, les 2 ressorts sont allongés sous l’effet des masses m1 et m2 , on écrira les équations de la dynamique uniquement pour les forces supplémentaires par rapport à l’équilibre,écrire les équations du mouvement que doivent satisfaire x1 et x2 4m1 3k k et k1 = 2 , on posera ω02 = 2 3. chercher les modes propres en prenant m2 = 3 8 m2 UNIVERSITÉ IBN TOFAIL 70 J.DIYADI 15. PROPAGATION D’ONDE 15 EXERCICES Propagation d’onde On se propose d’étudier la propagation d’une onde dans un tuyau cylindrique de section S, d’axe Ox rempli d’air de masse volumique ρ = 1, 29 kg.m −3 et de coefficient de compressibilité adiabatique χ = 6, 58910−6 unité S I. Les transformations subies par le fluide lors du passage de l’onde seront considérées comme étant adiabatiques. La section droite du fluide qui, au repos, se trouve dans le plan d’abscisse x, se déplace au passage de l’onde, au temps t au point d’abscisse x + S(x, t). On montre que : ∂2 S(x, t) ∂2 S(x, t) − ρχ =0 (1) 2 ∂x ∂t2 et on rappelle la définition du coefficient de compressibilité en fonction de la pression P et du volume V : ∂V χ=− (2) ∂P Onde progressive 1. Quelle est la signification physique de χ ? Pourquoi est-elle affectée d’un signe négatif ? En quelle unité peut-on l’exprimer ? 2. Donner la vitesse c de propagation de l’onde et calculer sa valeur numérique. 3. Donner sans démonstration, l’expression la plus générale de la solution de l’équation 1 et interpréter chaque terme. 4. Le tuyau est semi-infini et l’onde se propage dans le sens des x croissants. On donne au point O (extrémité du tube) un mouvement sinusoidal d’expression S(x, t) = S0 cos ωt Exprimer S(x, t) et v(x, t) = deurs ? ∂S(x, t) fonction de S0 , c, x et t. Que représentent ces gran∂t 5. La pression P est de la forme P = Patm + p(x, t) où la surpression p(x, t), par rapport à la pression atmosphérique constante Patm , est de la forme : p(x, t) = − 1 ∂S(x, t) χ ∂x (3) (a) donner l’expression de p(x, t) et montrer que p(x, t) = ρcv(x, t). (b) L’intensité I d’une onde sonore est le travail effectué sur une section de fluide par unité de temps et de surface, donner l’expression de I. (c) Déterminer l’intensité moyenne < I > de l’onde en fonction de S0 ,c,ω etρ. (d) Application : Le seuil de l’audition de l’oreille humaine pour une fréquence de 1000 Hz, correspond à une intensité moyenne < I >= 2, 510−12 w.m −2 . Calculer l’amplitude de déplacement correspondante. Onde stationnaire Le tuyau une longueur L quelconque et on se place à des instants t l’onde sonore dans le tuyau est de la forme : P(x, t) = Ae j(ωt−kx) + Be j(ωt+kx) UNIVERSITÉ IBN TOFAIL 71 L . On suppose que c (4) J.DIYADI 15. PROPAGATION D’ONDE EXERCICES 1. En utilisant ces conditions aux limites p(0, t) = p(L, t) = 0 determiner l’expression réelle de la pression acoustique p(x, t) ainsi que les fréquences des ondes stationnaires qui peuvent s’établir dans le tuyau. 2. En déduire, à partir de la relation ( 3), l’expression réelle de S(x, t). 3. Représenter graphiquement p(x, t) et S(x, t) pour les 3 premiers modes de vibration. 4. Donner l’expression de l’énergie moyenne par unité de longueur dans le tuyau pour le mode de vibration de rang n. UNIVERSITÉ IBN TOFAIL 72 J.DIYADI
© Copyright 2026 Paperzz