Faculté des sciences
Département de physique
PHYSIQUE DES VIBRATIONS
Jaouad DIYADI
2014/2015
Introduction
On traitera dans ce cours 2 parties :
Vibrations : vibrations d’un oscillateur et couplages entre oscillateurs.
Ondes : propagation des vibrations.
Vibrations : oscillations périodiques d’un système (oscillateur), autour d’un point d’équilibre
stable. La plupart des systèmes physiques (système mécanique, électrique, thermodynamique
. . . etc). Ces oscillations ont lieu si le système est écarté de son point d’équilibre et des forces de
rappel tendent à le ramener vers ce point.
Ondes : évolutions spatiales et temporelles d’un système lorsque ses constituants peuvent effectuer des oscillations et interagir (transfert d’énergie) entre voisins sans transport de matière.
Les oscillations peuvent être de nature intrinsèque :
3 ressort
3 fil de torsion
ou d’un mouvement autour d’un équilibre stable :
3 une bille dans un bol
3 modèle d’une liaison moléculaire
L’outil mathématique utilisé est l’équation différentielle linéaire d’ordre 2 à coefficients
constants
a2 x¨ + a1 x˙ + a0 x = 0
Parmi les phénomènes qui obéissent à cette équation on peut citer (en plus des oscillations
habituelles, masse attachée à un ressort ou un pendule, disque relié à un fil de torsion) les
oscillations de :
3 charge électrique dans un circuit RLC
3 charge électrique dans une antenne
3 atome soumis à une excitation lumineuse
3 interaction dans les réactions chimiques
3 poutre en flexion
3 croissance d’une colonie de bactérie en interaction avec la nourriture et le poison(que les
bactéries produisent)
3 la population dans une forêt . . . etc
F IGURE 1 – Divers oscillateurs
UNIVERSITÉ IBN TOFAIL
1
J.DIYADI
Table des matières
I
VIBRATIONS
1
Oscillations libres
1.1 Définitions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2 Oscillations libres . . . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.1 Oscillateur harmonique . . . . . . . . . . . . . . . . . . .
1.2.2 Loi de Hookes . . . . . . . . . . . . . . . . . . . . . . . . .
1.2.3 Association de ressorts en série et en paralléle . . . . . .
1.2.4 Equation de Newton . . . . . . . . . . . . . . . . . . . . .
1.2.5 Diagramme de phase . . . . . . . . . . . . . . . . . . . . .
1.3 Aspect énergétique . . . . . . . . . . . . . . . . . . . . . . . . . .
1.3.1 Bilan d’énergie . . . . . . . . . . . . . . . . . . . . . . . .
1.3.2 Valeurs moyennes des énergies potentielles et cinétiques
1.4 Autres types d’oscillateurs . . . . . . . . . . . . . . . . . . . . . .
1.4.1 Oscillateur électrique . . . . . . . . . . . . . . . . . . . . .
1.4.2 Pendule simple . . . . . . . . . . . . . . . . . . . . . . . .
1.4.3 Oscillateur spatial . . . . . . . . . . . . . . . . . . . . . .
2
3
4
L’oscillateur amorti
2.1 Équation du mouvement . . . . . .
2.2 Solutions de l’équation du
mouvement . . . . . . . . . . . . .
2.2.1 Équation caractéristique . .
2.2.2 Régime pseudo-périodique
2.2.3 Régime apériodique . . . .
2.2.4 Régime critique . . . . . . .
2.3 Aspect énergétique . . . . . . . . .
4
.
.
.
.
.
.
.
.
.
.
.
.
.
.
5
5
5
5
6
6
7
7
8
9
10
10
10
11
12
. . . . . . . . . . . . . . . . . . . . . . . . . . .
14
14
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
Oscillations forcées
3.1 Situation du problème . . . . . . . . . . . .
3.2 Cas d’une excitation sinusoïdale . . . . . .
3.2.1 Étude de la solution . . . . . . . . .
3.2.2 Détermination de la solution forcée
3.3 Étude de l’amplitude en fonction
de la fréquence . . . . . . . . . . . . . . . .
3.3.1 Étude de la Résonance . . . . . . . .
3.3.2 Bandes passantes . . . . . . . . . . .
Oscillations couplées
4.1 Oscillations libres d’un système
à deux degrés de liberté . . . . . . .
4.1.1 Cas du couplage faible . . .
4.1.2 Pulsations et modes propres .
4.1.3 Analogie électromécanique .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
16
16
16
18
18
19
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
20
20
21
21
21
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . .
24
24
26
28
.
.
.
.
2
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
28
30
31
32
TABLE DES MATIÈRES
4.2
4.3
II
5
III
6
TABLE DES MATIÈRES
Oscillations forcées d’oscillateurs
couplés . . . . . . . . . . . . . . . . . . . . . . .
4.2.1 Système oscillant à un degré de liberté .
4.2.2 Système à degré de liberté multiple . .
Chaine d’oscillateurs . . . . . . . . . . . . . . .
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
ONDES
40
Une approche
du phénomène de propagation
5.1 Le phénomène de propagation . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.1 Généralisation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.1.2 Les différents types d’ondes . . . . . . . . . . . . . . . . . . . . . . .
5.2 Ondes dans la chaine
d’oscillateurs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.1 Équation de propagation dans la chaine d’oscillateurs . . . . . . . .
5.2.2 Solutions harmoniques . . . . . . . . . . . . . . . . . . . . . . . . . .
5.2.3 Onde monochromatique progressive . . . . . . . . . . . . . . . . .
5.2.4 Longueur d’onde, vecteur d’onde . . . . . . . . . . . . . . . . . . .
5.2.5 Approximation des milieux continus . . . . . . . . . . . . . . . . .
5.3 Équations de propagation
de d’Alembert . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.1 Corde vibrante . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.3.2 Lignes de transmission . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4 Solution de l’équation
de propagation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.4.1 Solutions harmoniques
de l’équation de d’Alembert . . . . . . . . . . . . . . . . . . . . . . .
5.4.2 Caracteristiques des ondes planes progressives monochromatiques
5.5 Ondes stationnaires . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
5.5.1 Modes de vibration d’une corde fixée aux extrémités . . . . . . . .
. . . .
. . . .
. . . .
41
41
41
42
.
.
.
.
.
.
.
.
.
.
.
.
43
43
44
46
46
47
. . . .
. . . .
. . . .
48
49
51
. . . .
52
.
.
.
.
54
54
55
56
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
EXERCICES
58
Exercices
6.1 Associations de ressorts . . . . . . . . . .
6.2 Ressorts et Poulies . . . . . . . . . . . . .
6.3 Étude d’un oscillateur
à l’aide de son portrait de phase . . . . . .
6.4 Problème (Devoir libre) . . . . . . . . . . .
6.5 Etude de la résonance( TP 2èmeséance ) . .
6.6 Modélisation d’un amortisseur . . . . . .
6.7 Sismographe (Devoir libre) . . . . . . . .
6.8 Couplage de 3 ressorts . . . . . . . . . . .
6.9 Oscillateurs couplés . . . . . . . . . . . . .
6.10 Couplage de pendules simples identiques
6.11 couplage ressort-pendule (1) . . . . . . . .
6.12 Couplage ressort-barre (1) . . . . . . . . .
6.13 Couplage ressort-barre (2)
(Devoir libre) . . . . . . . . . . . . . . . .
6.14 Couplage ressort-barre (2) . . . . . . . . .
6.15 Propagation d’onde . . . . . . . . . . . . .
UNIVERSITÉ IBN TOFAIL
33
33
35
38
3
. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .
59
59
59
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
60
61
63
63
64
65
65
67
68
69
. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . .
69
70
71
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
.
J.DIYADI
Première partie
VIBRATIONS
4
Chapitre 1
Oscillations libres
1.1
Définitions
Phénomène périodique : événement périodique qui se reproduit à intervalles réguliers.
Si l’événement se répète à intervalles de temps fixes, on dit qu’il est périodique en temps .
S’il se reproduit à des positions régulièrement espacées on dit qu’il est périodique dans
l’espace.
La rotation de la Terre est un mouvement périodique dans le temps, les intervalles de temps
sont égaux à un jour.
Les lignes d’un papier millimétré périodique dans l’espace, elles sont régulièrement espacées de 1 mm.
Période (s) : intervalle de temps au bout duquel un évènement périodique se reproduit avec
la même phase.
L’unité SI de la période est la seconde (s).
Fréquence (s−1 ) : mesure le nombre de fois qu’un évènement périodique se reproduit en 1
seconde de temps.
L’unité SI de fréquence est le hertz (Hz).
Une fréquence de 1Hz(= 1s−1 ) signifie qu’un événement se reproduit une fois à chaque
seconde.
La fréquence du courant électrique alternatif distribué au Maroc est de 50 Hz, son intensité
dans un sens donné passe par un maximum tous les 1/50 de seconde, mais il change de sens
100 fois par seconde.
Position de repos :
extérieure.
1.2
1.2.1
état d’un système oscillant avant d’être mis en mouvement par une force
Oscillations libres
Oscillateur harmonique
Oscillateur : un oscillateur ou vibrateur est un système qui peut être le siège d’oscillations.
Un pendule est un oscillateur mécanique, de même qu’un système constitué d’une masse suspendue au bout d’un ressort. Un circuit électrique constitué d’une capacité et d’une inductance
est un exemple d’oscillateur électrique.
Les oscillateurs harmoniques : un oscillateur harmonique est un oscillateur dont l’évolution
dans le temps est décrite par une fonction sinusoïdale et dont la fréquence ne dépend que des
caractéristiques du système.
5
1.2. OSCILLATIONS LIBRES
CHAPITRE 1. OSCILLATIONS LIBRES
Il faut noter qu’un un oscillateur harmonique est un outil de modélisation dans de nombreux
domaines : mécanique, électricité, électronique, optique, chimie, biologie,. . .
1.2.2
Loi de Hookes
On va s’intéresser à l’étude du ressort car c’est à travers le ressort qu’on va déterminer les
propriétés des oscillateurs en général.
Soit un ressort de longueur à vide l0 et de raideur k.
Si x est l’allongement du ressort alors le ressort exerce une force ~f pour revenir à sa position
initiale. La force ~f est proportionnelle à l’allongement algébrique x.
La projection de cette force sur l’axe ox donne
f = −kx
1.2.3
c’est la loi deH OOKS
(1.1)
Association de ressorts en série et en paralléle
en parallèle
en série
1
1
1
=
+
ks
k1
k2
k p = k1 + k2
(1.2)
k s est la raideur équivalente de deux ressorts bout à bout (en série), k p est la raideur équivalente
de deux ressorts accolés (en parallèle).
UNIVERSITÉ IBN TOFAIL
6
J.DIYADI
1.2. OSCILLATIONS LIBRES
CHAPITRE 1. OSCILLATIONS LIBRES
on généralise facilement ces résultats au cas où N > 2 ressorts en série ou en parallèle. Par
exemple pour N ressorts identiques placés en série :
l0 → Nl0 =⇒
1
1
k
= N =⇒ k s =
ks
k
N
Les relations (1.2) montre que la raideur d’un ressort est inversement proportionnelle à la longueur l, soit :
A
x
k=
=⇒ f = − A
(1.3)
l0
l0
A est appelé le module d’Young. Avec cette notation, la force exercée par le ressort est proporx
tionnelle à l’allongement relatif .
l0
1.2.4
Equation de Newton
Soit x = 0 la position d’équilibre. La loi de Newton, pour
une masse m accrochée à l’extrémité du ressort, dont la masse
est négligée, s’écrit :
m x¨ = −kx
x¨ + ω02 x = 0
ω02 =
k
m
(1.4)
(1.5)
Cette équation a pour solution une sinusoïde de pulsation ω0 , ce qui implique deux paramètres,
qui sont déterminés par les conditions initiales.
Il y a deux manières d’écrire la solution la plus générale,
x(t ) = Xm cos(ω0 t − ϕ)
ou bien
x(t ) = A cos ω0 t + B sin ω0 t
(1.6)
avec
A
B
, sin ϕ = −
Xm
Xm
Xm désigne l’amplitude ω0 la pulsation propre ϕ la
phase initiale Le mouvement est périodique de période
2π
T0 =
.
ω0
Xm =
p
A2 + B2 ,
cos ϕ =
Quelle est l’origine du qualificatif harmonique ?
La propriété la plus remarquable de cette solution est
que la période est indépendante de l’amplitude, on dit
qu’il y a isochronisme c’est pourquoi on introduit le qualificatif harmonique pour ce mouvement.
1.2.5
Diagramme de phase
Cherchons la relation entre v et x à partir de la conservation de l’énergie mécanique et à
partir de la conservation de l’énergie mécanique :
• À partir de la conservation de l’énergie mécanique :
Em ( x ) =
1 2
kX
2 m
→
1 2 1 2 2
v + ω0 x = C
2
2
(C) est une constante qui varie en fonction des conditions initiales notons
2C
A = 2C et B = 2 ;
ω0
v2
x2
+
=1
A
B
UNIVERSITÉ IBN TOFAIL
7
(1.7)
J.DIYADI
1.3. ASPECT ÉNERGÉTIQUE
CHAPITRE 1. OSCILLATIONS LIBRES
• À partir de la solution de l’équation différentielle
x (t) = Xm cos(ω0 t − ϕ)
v(t) = x˙ = ω0 Xm sin(ω0 t − ϕ)
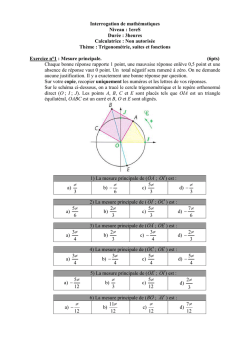
x2
v2
+
=1
2
2 ω2
Xm
Xm
0
c’est l’équation d’une ellipse
(1.8)
F IGURE 1.1 – Diagramme de phase
quand C = 0 → x = 0 →
En dehors du centre :
x = 0 → v = vmax
1.3
v=0
c’est le centre des différentes ellipses.
et lorsque
v=0
→
x = Xmax
Aspect énergétique
Considérons un cas plus générale (oublions le ressort pour le moment)où une particule
ponctuelle soumise à la seule force conservative 1 ~f et ne dépend que d’un seul paramètre x :
~f = f x~e
celle-ci dérive d’une énergie potentielle E p :
fx = −
dE p
dx
(1.9)
On montre que si E p ( x ) admet un minimum pour x = x0 alors il existe un point d’équilibre
stable en x = x0 .
Effectuons un développement limité d’ordre 2 au voisinage de ce point :
dE p
( x − x0 )2 d2 E p
) x = x0 +
(
) x = x0 + · · ·
dx
2
dx
Puisqu’on a un minimum en x = x0 on peut assimiler la fonction E p ( x ) , au voisinage de
l’équilibre, à une parabole :
E p ( x ) = E p ( x0 ) + ( x − x0 )(
E p ( x ) = E p ( x0 ) +
( x − x0 )2 d2 E p
(
) x = x0 + · · ·
2
dx
1. force conservative = force dont le travail ne dépend pas du chemin suivi, elle dérive d’un potentiel
~f = − gradE
~ p
UNIVERSITÉ IBN TOFAIL
8
J.DIYADI
1.3. ASPECT ÉNERGÉTIQUE
On suppose que (
CHAPITRE 1. OSCILLATIONS LIBRES
d2 E p
) x=x0 existe et on pose :
dx
1 d2 E p
(
) x = x0 = k
2 dx
on en déduit alors l’expression au voisinage de l’équilibre :
fx = −
dE p
= − k ( x − x0 )
dx
(1.10)
On peut remarquer l’analogie évidente entre l’expression de cette force et celle de la force de
rappel d’un ressort. La projection du P.F.D sur l’axe (ox ) donne
m x¨ = f x = −k ( x − x0 )
posons X = x − x0
l’équation ci-dessus s’écrit alors
X¨ + ω02 X = 0
On retrouve l’équation différentielle d’un oscillateur harmonique
Conclusion :
Si une particule est soumise aux seules forces conservatives alors elle est considérée
comme un oscillateur harmonique.
Exemple :
Les liaisons atomiques (fig.1.2) peuvent être représentées par des ressorts reliant les atomes
entre eux et qui vibrent autour de leurs positions d’équilibre stable.
F IGURE 1.2 – Un modèle de liaison atomique.
1.3.1
Bilan d’énergie
Reprenons l’expression de la solution du mouvement d’un oscillateur harmonique :
x¨ + ω02 x = 0 → x (t) = Xm cos(ω0 t − ϕ)
Pour une force conservative qui dérive d’une énergie potentielle E p ( x ) , cette énergie est définie
à une constante prés (on prendra E p (0) = 0).
UNIVERSITÉ IBN TOFAIL
9
J.DIYADI
1.4. AUTRES TYPES D’OSCILLATEURS
CHAPITRE 1. OSCILLATIONS LIBRES
L’énergie potentielle
1 2
kx
2
→
E p (t ) =
1
kX 2 cos2 (ω0 t − ϕ)
2 m
1 2
mv
2
→
Ec ( x) =
1
kX 2 sin2 (ω0 t − ϕ)
2 m
Em = Ec + E p
→
Ep (x) =
L’énergie cinétique
Ec ( x ) =
L’énergie mécanique
Em ( x) =
1
kX 2
2 m
(1.11)
L’énergie mécanique est une constante du mouvement (les forces sont conservatives) on la
notera par la suite E0 .
1.3.2
Valeurs moyennes des énergies potentielles et cinétiques
1 RT
1 RT 1
1
2
2
2
h E p i = T 0 E p (t )dt = T 0 2 kXm cos (ω0 t − ϕ) = 4 kXm
h E i = 1 R T E (t )dt = 1 R T 1 kX 2 sin2 (ω t − ϕ) = 1 kX 2
c
c
0
T 0
T 0 2 m
4 m
(1.12)
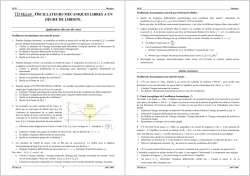
La figure (1.3) représente la variation des énergies cinétique et potentielle. Les valeurs
moyennes des énergies potentielle et cinétique sont égales, il y a en permanence un transfert
d’énergie entre les deux formes.
1
h E p i = h E c i = h E0 i
2
(1.13)
F IGURE 1.3 – Variations des énergies cinétique et potentielle en fonction de x.
1.4
1.4.1
Autres types d’oscillateurs
Oscillateur électrique
Considérons un circuit LC (fig 1.4), q étant la charge du condensateur à l’instant t
Le bilan des tensions :
di
q
L + =0
dt C
UNIVERSITÉ IBN TOFAIL
10
J.DIYADI
1.4. AUTRES TYPES D’OSCILLATEURS
CHAPITRE 1. OSCILLATIONS LIBRES
F IGURE 1.4 – Circuit LC série
or
i=
dq
dt
→
L
q
d2 q
+ =0
2
dt
C
soit
d2 q
+ ω02 q = 0
dt 2
(1.14)
1
ω0 = √
LC
(1.15)
q(t ) = Qmax cos(ω0 t − ϕ)
(1.16)
avec
La solution est
On remarquera l’analogie
x→q
1.4.2
v→i
Pendule simple
Soit un pendule simple constitué d’un fil de longeur L auquel est accrochée une masse m
(fig 1.5).
F IGURE 1.5 – Pendule simple
L’équation du mouvement pour un pendule simple s’écrit :
l θ¨ + g sin θ = 0
si θ petit, alors
sin θ ' θ
et
l θ¨ + gθ = 0
UNIVERSITÉ IBN TOFAIL
11
J.DIYADI
1.4. AUTRES TYPES D’OSCILLATEURS
CHAPITRE 1. OSCILLATIONS LIBRES
soit :
θ¨ + ω02 θ = 0
(1.17)
avec
r
ω=
g
l
(1.18)
la solution est :
θ(t ) = θmax cos(ω0 t − ϕ)
1.4.3
(1.19)
Oscillateur spatial
Si le ressort effectue le mouvement dans un plan ( x, y),
m~r¨ = −k~r
(1.20)
On projette cette relation sur les axes orthonormés contenus dans le plan du mouvement d’origine le centre des forces
m x¨ = −kx
my¨ = −ky
(1.21)
on obtient alors : un mouvement sinusoïdal de même pulsation sur chaque axe et les solutions
s’écrivent :
x(t ) = a cos(ω0 t − ϕ)
et
y(t ) = b cos(ω0 t − ϕ)
C’est une ellipse de centre O.
UNIVERSITÉ IBN TOFAIL
12
J.DIYADI
1.4. AUTRES TYPES D’OSCILLATEURS
CHAPITRE 1. OSCILLATIONS LIBRES
Analogie électrique-mécanique
Des systèmes mécaniques peuvent être représentés par des circuits électriques analogues. Deux
systèmes l’un mécanique et l’autre électrique sont dits analogues si les équations différentielles
qui régissent leur évolution sont identiques. Quand cette équivalence est obtenue, les termes
correspondant dans les équations différentielles sont dits analogues. Il y a deux types d’analogies pour les systèmes mécaniques et électriques :
• l’analogie force-tension ou analogie masse-inductance (c’est la plus utilisée).
• l’analogie force-courant ou analogie masse-capacitance.
F IGURE 1.6 – Équivalence électrique-mécanique
UNIVERSITÉ IBN TOFAIL
13
J.DIYADI
Chapitre 2
L’oscillateur amorti
Dans l’oscillateur non amorti on constate que :
• l’énergie est conservée
• le mouvement se poursuit éternellement
Mais en réalité, il y a toujours des frottements qui se manifestent par :
• perte d’énergie (dissipation sous forme de chaleur par ex)
• amortissement du mouvement
Nous allons tenir compte de ce paramètre et considerer par la suite les frottements fluides
proportionnelles à la vitesse.
~f = −α~v
2.1
(2.1)
Équation du mouvement
En tenant compte des frottements le ressort est soumis à :
• la force de rappel −k~r
• la force de frottement −α~v
Supposons que le mouvement s’effectue sur un axe horizontal (ox) :
m x¨ = −kx − αv
x¨ +
,
v = x˙
α
k
x˙ +
=0
m
m
(2.2)
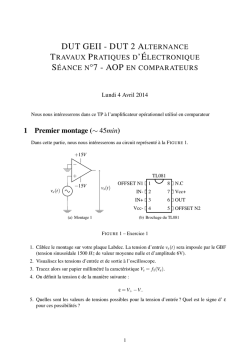
Analogie avec le circuit électrique
Pour un circuit RLC série en court-circuit La loi des mailles appliquée au circuit RLC fermé
F IGURE 2.1 – Circuit RLC série
donne
uC + u R + u L = 0
14
2.1. ÉQUATION DU MOUVEMENT
avec
uc =
q
;
C
CHAPITRE 2. L’OSCILLATEUR AMORTI
u R = RI = R
dq
;
dt
uL = L
dI
d2 q
= 2
dt
dt
d’où
q¨ +
1
R
q˙ +
q=0
L
LC
(2.3)
Le tableau suivant explicite en partie l’analogie qui existe entre la mécanique et l’électricité :
Mécanique
←→
m x¨ + α x˙ + kx = 0
r
k
m
élongation x
vitesse v
←→
raideur
←→
←→
←→
←→
k
←→
1 2
énergie cinétique
m x˙ ←→
2
1 2
énergie potentielle
kx ←→
2
Revenons l’équation du mouvement (2.2)
frottement
α
Electricité
1
Lq¨ + Rq˙ + q = 0
r C
1
LC
charge q
intensité i = q˙
1
capacité
C
résistance R
1 2
énergie magnétique
Lq˙
2
11 2
énergie électrostatique
q
2C
α
k
x˙ +
=0
m
m
Habituellement on met cette équation sous une forme dite canonique en posant :
r
k
α
et
λ=
ω0 =
m
2m
x¨ +
x¨ + 2λ x˙ + ω02 x = 0
(2.4)
Remarques : en électricité et pour des commodités de calcul, on utilise une définition différente de λ , en effet au lieu de noter
R
= 2λ
L
on note
R
= 2λω0
L
et l’équation s’écrit dans ce cas :
q¨ + 2λω0 q˙ + ω02 q = 0
(2.5)
On peut rencontrer aussi d’autres écritures,par exemples :
• En fonction de ω0 et d’un temps de relaxation, on pose :
α
1
= 2λ = (τ homogène à un temps)
m
τ
x¨ +
1
x˙ + ω02 x = 0
τ
(2.6)
• En fonction de ω0 et du facteur de qualité Q, Q est sans dimension. On pose :
Q = ω0 τ
x¨ +
UNIVERSITÉ IBN TOFAIL
ω0
x˙ + ω02 x = 0
Q
15
(2.7)
J.DIYADI
2.2. SOLUTIONS DE L’ÉQUATION DU
MOUVEMENT
2.2
2.2.1
CHAPITRE 2. L’OSCILLATEUR AMORTI
Solutions de l’équation du
mouvement
Équation caractéristique
Pour résoudre l’équation (2.4) on cherche des solutions sous forme :
x (t) = kert
on obtient alors l’équation caractéristique
r 2 + 2λr + ω02 = 0
(2.8)
si r1 et r2 sont solutions de l’équation (2.8) , alors leur combinaison
x(t ) = Aer1 t + Ber2 t
(2.9)
est aussi solution et elle est plus générale. On a plusieurs solutions à envisager selon les
valeurs de r1 et r2 .
Faisons l’étude selon le signe de
2.2.2
40 = λ2 − ω02
Régime pseudo-périodique
40 < 0
→
λ2 − ω02
→
λ < ω0 et pour le facteur de qualité :
1
1
1
α
= 2λ = →
< ω0 → ω0 τ >
m
τ
2τ
2
soit
Q>
1
2
(2.10)
40 < 0 → les deux racines sont complexes conjuguées
q
r1,2 = −λ ± j ω02 − λ2
posons :
ω2 = ω02 − λ2
(2.11)
soit
r1,2 = −λ ± jω
La solution s’écrit :
x(t ) = Xm e−λt cos(ωt − ϕ)
ou
x(t ) = e−λt ( A cos ωt + B sin ωt )
(2.12)
Xm et ϕ ou A et B sont des constantes à déterminer à partir des conditions initiales.
Pour ce type de mouvement on définit deux grandeurs :
• La pseudo-période
• Le décrément logarithmique
UNIVERSITÉ IBN TOFAIL
16
J.DIYADI
2.2. SOLUTIONS DE L’ÉQUATION DU
MOUVEMENT
CHAPITRE 2. L’OSCILLATEUR AMORTI
F IGURE 2.2 – Régime pseudo-périodique
La pseudo-période
C’est l’intervalle de temps entre trois passages par la position d’équilibre.
c’est la période de la fonction cos(ωt − ϕ) qui vaut :
T=
2π
=
ω
2π
s
ω0
T= s
1−
λ2
ω02
T0
λ2
1− 2
ω0
(2.13)
Remarque :
λ < ω0 → T > T0
Les frottements provoquent l’augmentation (légère) de la période du mouvement.
Le décrément logarithmique
Reprenons la première expression de la solution du régime pseudo-périodique (équation (2.12)
x (t) = Xm e−λt cos(ω0 t − ϕ)
| {z }
A(t)
calculons le rapport des amplitudes
A(t)
:
A(t + T )
A(t)
Xm e−λt
=
= eλT
A(t + T )
Xm e − λ ( t + T )
ce rapport dépend de λT, posons :
λT = δ
(2.14)
δ s’appelle le "décrément logarithmique".
Le décrément logarithmique caractérise la vitesse de décroissance des amplitudes.
δ = ln
UNIVERSITÉ IBN TOFAIL
A(t )
A(t + T )
17
(2.15)
J.DIYADI
2.2. SOLUTIONS DE L’ÉQUATION DU
MOUVEMENT
CHAPITRE 2. L’OSCILLATEUR AMORTI
si on considère la 1re amplitude à l’instant t et la nème amplitude à l’instant t + T
A(t)
1
A(t)
A(t)
= eλnT ⇒ nλT = ln
⇒ δ = ln
A(t + nT )
A(t + nT )
n A(t + nT )
δ=
2.2.3
1
A(t )
ln
n A(t + nT )
(2.16)
Régime apériodique
40 > 0
→
λ > ω0 (fort frottement)
q
r1 = −λ + λ2 − ω02
q
r = − λ − λ2 − ω 2
2
0
comme r1 et r2 sont négatifs la solution est la somme de deux exponentielles décroissantes
x (t) = Aer1 t + Ber2 t
x(t ) = e−λt [ Aeωt + Be−ωt ]
(2.17)
avec
ω=
2.2.4
q
λ2 − ω02
(2.18)
Régime critique
40 = 0
→
λ = ω0
la solution s’écrit :
→
r1 = r2 = − λ
x(t ) = ( At + B)e−λt
(2.19)
A et B à déterminer à partir des conditions initiales. La figure (2.3) montre l’allure des trois
régimes étudiés.
Pour le régime critique (courbe(c)) :
F IGURE 2.3 – Les différents régimes d’oscillation
UNIVERSITÉ IBN TOFAIL
18
J.DIYADI
2.3. ASPECT ÉNERGÉTIQUE
CHAPITRE 2. L’OSCILLATEUR AMORTI
• l’allure du régime critique est semblable à l’allure du régime apériodique avec un retour à la
position d’équilibre plus rapide.
• c’est la limite qui sépare le mouvement apériodique et le mouvement oscillatoire.
• il s’agit d’un régime théorique et il est très difficile et même presque impossible de l’observer
car l’égalité ne peut jamais être rigoureuse.
2.3
Aspect énergétique
On se limitera au cas où il y a oscillations.
x (t) = Xm e−λt cos(ωt − ϕ)
−→
x˙ (t) = Xm e−λt [−λ cos(ωt − ϕ) − ω sin(ωt − ϕ)]
les énergies cinétique et potentielle :
Ec =
1 2
m x˙
2
Ep (x) =
;
1 2
kx
2
l’énergie mécanique :
Em =
1
2 −2λt
mXm
e
[(λ cos(ωt − ϕ) − ω sin(ωt − ϕ))2 + ω02 cos2 (ωt − ϕ)]
2
L’énergie mécanique n’est pas constante, elle diminue en moyenne en e−2λt . L’amortissement
est donc accompagné de dissipation d’énergie.
Cas d’un amortissement très faible
On se place dans le cas ou
λ ω0
−→
ω ' ω0
Em diminue, donc si Em (t) est l’énergie à l’instant t et Em (t + T0 ) est l’énergie à l’instant t + T0
alors
Em (t + T0 ) < Em (t) et ∆Em = Em (t) − Em (t + T0 ) > 0
On montre facilement que
∆Em
T0
2π
2π
=
=
=
Em
τ
ω0 τ
Q
on obtient une interprétation énergétique du du facteur de qualité dans le cas d’un amortissement très faible :
Em
Q = 2π
(2.20)
∆Em
Attention
cette expression n’est valable que pourλ ω0 .
UNIVERSITÉ IBN TOFAIL
19
J.DIYADI
Chapitre 3
Oscillations forcées
C’est un chapitre important avec beaucoup d’applications :
• Excitation d’un circuit électrique par un générateur de fréquence
• Réponse d’un véhicule aux cahots de la route
• Résonance à certaines fréquences, le système répond avec une amplitude très grande.
Certains exemples de résonance sont célèbres :
3 Pont s’écoulant sous une troupe marchand au pas cadencé
3 manifestants qui renversent des voitures qu’ils agitent verticalement à un rythme approprié.
A la fin de ce chapitre, on doit savoir distinguer entre :
•
•
•
•
3.1
Régime apériodique, régime critique et régime pseudo-périodique.
Mouvement libre et mouvement forcé.
Régime transitoire et régime permanent.
Fréquence propre, fréquence d’excitation et fréquence de résonance.
Situation du problème
L’existence d’une force de frottement =⇒ dissipation d’énergie (sous forme de chaleur)
=⇒ amortissement des oscillations =⇒ arrêt du mouvement.
On doit appliquer alors une force extérieure pour entretenir le mouvement.
Reprenons l’oscillateur horizontale et exerçons une force supplémentaire ~F (t) sur la masse
Fig.(3.1).
F IGURE 3.1 – Oscillateur forcé
~F (t) = F (t)~ex
Le principe fondamental de la dynamique ( PFD )appliqué à la masse donne :
m x¨ = −kx − α x˙ + F (t)
20
3.2. CAS D’UNE EXCITATION SINUSOÏDALE
CHAPITRE 3. OSCILLATIONS FORCÉES
ou bien
x¨ +
α
k
F (t)
x˙ +
=
m
m
m
r
k
α
F (t)
;
λ=
;
= g(t)
m
2m
m
et l’équation différentielle du mouvement s’écrit alors :
ω0 =
(dimension d’une accéleration)
x¨ + 2λ x˙ + ω02 x = g (t )
3.2
(3.1)
Cas d’une excitation sinusoïdale
On se limitera dans la suite aux excitations sinusoïdales.
F (t) = F cos Ωt
g(t) = gm cos Ωt
−→
avec
gm =
F
m
x¨ + 2λ x˙ + ω02 x = gm cos Ωt
(3.2)
Intérêt de l’excitation sinusoïdale
• Intérêt pratique : utilisation dans les machines, description du mouvement dans un champ
magnétique, . . . etc
• Intérêt théorique : F (t) peut s’écrire comme superposition de fonctions sinusoïdales discrètes
ou continues (selon que la fonction F (t) est périodique ou non) et la solution, comme la
somme de solutions obtenues pour chaque fonction sinusoïdale.
3.2.1
Étude de la solution
La solution de l’équation s’écrit :
(
x (t) = x H + x p
3.2.2
avec
x H = solution de l’équation homogène
x p = solution particulière
(3.3)
Détermination de la solution forcée
La solution x H (t) de l’équation sans second membre a été déjà étudiée dans le chapitre (1).
Cette solution disparait avec le temps, (régime transitoire), seule reste la solution particulière
(régime permanent).
Cherchons la solution particulière sous forme de :
x P (t) = A cos(Ωt − ψ)
On utilisera la méthode des complexes, (ou la méthode de Fresnel, les deux méthodes sont
complémentaires).
On associe à x P (t) son complexe
− jψ jΩt
jΩt
x p (t) = Ae j(Ωt−ψ) = |Ae{z
} e = Xe
X
de même à
g(t) = gm cos Ωt
est associé le complexe
g(t) = gm e jΩt
UNIVERSITÉ IBN TOFAIL
21
J.DIYADI
3.2. CAS D’UNE EXCITATION SINUSOÏDALE
CHAPITRE 3. OSCILLATIONS FORCÉES
F IGURE 3.2 – Régime forcé.
L’équation (3.2) se réduit à l’écriture suivante en notation complexe :
x¨ p + 2λ x˙ p + ω02 x p = gm
(−Ω2 X + 2jλΩX + ω02 X )e jΩt = gm e jΩt
−Ω2 X + 2jλΩX + ω02 X = gm
gm
X=
2
(ω0 − Ω2 ) + 2jλΩ
le module est donné par A =
q
∗
( XX )
A(Ω) = q
F
m
(ω02 − Ω2 )2 + 4λ2 Ω2
tan ψ =
2λΩ
− Ω2
ω02
(3.4)
(3.5)
sin ψ doit être > 0 pour avoir l’amplitude A > 0.
UNIVERSITÉ IBN TOFAIL
22
J.DIYADI
3.2. CAS D’UNE EXCITATION SINUSOÏDALE
CHAPITRE 3. OSCILLATIONS FORCÉES
Récapitulatif
x(t ) = x H + x p
−λt cos( ωt − ψ )
si
λ2 < ω02
Ce
x(t ) = A(Ω) cos(Ωt − ψ) + e−λt ( Aeωt + Be−ωt ) si
λ2 = ω02
−λt
e
[ Aeωt + Be−ωt ] si
λ2 > ω02
q
régime faiblement amorti
ω 2 − λ2
(
1
)
ω
=
r0
k
( 2 ) ω0 =
régime critique
q m
(3) ω = λ2 − ω 2
régime fortement amorti
0
(1)
(2)
(3)
si on utilise d’autres paramètres que λet ω0 on obtient :
m
1
• en fonction de τ =
=
et de ω02 :
α
2λ
Remarque
F
m
X=
(ω02 − Ω2 ) + j
Ω
τ
d’où
F
m
A(Ω) = r
2
2 − Ω2 )2 + Ω
(
ω
0
2
τ
Ω
tan ψ = −
τ (ω02 − Ω2 )
• en fonction de Q = ω0 τ =
(3.6)
ω0
et ω02 :
2λ
F
m
X=
(ω02 − Ω2 ) + j
Ωω0
Q
d’où
A(Ω) = s
F
m
(ω02 − Ω2 )2 +
ω02 Ω2
Q2
(3.7)
1
tan ψ = −
ω0
Ω
Q(
−
)
Ω
ω0
UNIVERSITÉ IBN TOFAIL
23
J.DIYADI
3.3. ÉTUDE DE L’AMPLITUDE EN FONCTION
DE LA FRÉQUENCE
3.3
3.3.1
CHAPITRE 3. OSCILLATIONS FORCÉES
Étude de l’amplitude en fonction
de la fréquence
Étude de la Résonance
On aura résonance de l’amplitude lorsque celle ci passe par son maximum. Cherchons le maximum de :
F
m
A(Ω) = q
(3.8)
(ω02 − Ω2 )2 + 4λ2 Ω2
|
{z
}
1
D (Ω) 2
A(Ω) est maximum si D (Ω) est minimum
dD
= 4Ω(Ω2 − ω02 + 2λ2 )
dΩ
(
Ω=0
dD
= 0 =⇒
dΩ
Ω2 = ω02 − 2λ2
la 2ème solution admet des valeurs réelles si :
√
ω02 > 2λ2 =⇒ ω0 > λ 2
ou bien, si l’on préfère la condition sur le coefficient de surtension :
Q = ω0 τ =
ω0
2λ
soit
r
Q>
1
2
(3.9)
Discussion
Discutons les deux cas suivants :
r
Q>
r
(a) si Q >
1
2
r
et
Q<
1
2
1
on aura 2 solutions possibles :
2
Ω = 0
r
q
1
Ω = Ωm = ω02 − 2λ2 = ω0 1 −
2Q2
les amplitudes pour ces 2 pulsations sont :
F
F
A (0) =
=
2
k
mω0
ω02
F
q
A
(
Ω
)
=
m
mω02 2λ ω 2 − λ2
0
et si l’on exprime A(Ωm ) en fonction du coefficient de surtension Q, on obtient :
A(Ωm ) =
UNIVERSITÉ IBN TOFAIL
F
mω02
24
Q
r
1
1−
4Q2
(3.10)
J.DIYADI
3.3. ÉTUDE DE L’AMPLITUDE EN FONCTION
DE LA FRÉQUENCE
CHAPITRE 3. OSCILLATIONS FORCÉES
On remarque que :
Q
r
1−
1
4Q2
1
( puisque Q > √ )
2
>1
d’où
A ( Ω m ) > A (0)
le maximum de A(Ω) est donc A(Ωm ) et la valeur de ce maximum est :
Am = A(Ωm ) =
F
mω02
ω02
2λ
q
ω02 − λ2
(résonance en amplitude)
r
ω0
1
(λ > √ )
2
2
Il y a une seule solution → Ω = 0. L’amplitude décroit avec la fréquence : il n y a pas de
résonance.
(b) Q <
On note donc que :
la résonance n’aura pas lieu si les frottements dépassent une certaine valeur
exprimée par :
ω0
λ> √
2
dA(Ω)
= 0 → Ω = 0 → tangente horizontale en cepoint
dΩ
F IGURE 3.3 – Résonance
Il s’agit de l’analogue de la résonance de tension aux bornes du condensateur d’un circuit RLC
(vu en TP en S3).
UNIVERSITÉ IBN TOFAIL
25
J.DIYADI
3.3. ÉTUDE DE L’AMPLITUDE EN FONCTION
DE LA FRÉQUENCE
3.3.2
CHAPITRE 3. OSCILLATIONS FORCÉES
Bandes passantes
Calcul de 4Ω
La finesse de la résonance se définit à l’aide de la bande passante (comme en électricité)
∆Ω = Ω2 − Ω1
C’est l’intervalle de fréquence ou l’amplitude reste > à l’amplitude maximale divisé par
√
2
Reprenons les expressions de A(Ω) (3.8) et Am (3.10)
cherchons Ω tel que
Am
A(Ω) > √
2
la résolution de cette inégalité donne
Ω1 ≤ Ω ≤ Ω2
r
1
1
Ω1 = ω0 1 − 2Q2 − Q (1 −
r
1
1
Ω 2 = ω0 1 −
+ (1 −
2
2Q
Q
1 1
)2
4Q2
1 1
)2
4Q2
Cas d’amortissement faible
Q 1 ; le développement limité donne
1
)
Ω 1 ' ω0 ( 1 −
2Q
1
Ω 2 ' ω0 ( 1 +
)
2Q
on en déduit la bande passante approchée :
∆Ω =
ω0
Q
Ce résultat fournit une autre définition du facteur de qualité :
Q=
ω0
∆Ω
(3.11)
(ω0 la pulsation propre ; ∆Ω la bande passante)
Dans le cas de faible amortissement :
• la fréquence de résonance est Ωm ' ω0
F Q
• l’amplitude maximale vaut Am '
m ω0
On en déduit pour un très faible amortissement :
Q=
UNIVERSITÉ IBN TOFAIL
Am
A (0)
26
J.DIYADI
3.3. ÉTUDE DE L’AMPLITUDE EN FONCTION
DE LA FRÉQUENCE
CHAPITRE 3. OSCILLATIONS FORCÉES
On définit la bande passante aussi comme :
l’intervalle de fréquence où l’énergie potentielle du ressort reste supérieur à la moitié
de l’énergie potentielle à la résonance.
(
E p = 12 kA2 (Ω)
A(Ω)
1
E p > 0.5E pR → A2 (Ω) > 12 A2m →
>√
1
2
Am
E pR = 2 kAm
2
1
la bande passante correspond à un rapport d’amplitude égale à √ est appelée bande passante
2
à −3dB.
En effet, le décibel (10 bel) est définit par 10 fois le logarithme décimal d’un rapport de puissance(ou d’énergie) :
Ep
) = 10 log 0.5 ' −3db
10 log(
E pR
UNIVERSITÉ IBN TOFAIL
27
J.DIYADI
Chapitre 4
Oscillations couplées
4.1
Oscillations libres d’un système
à deux degrés de liberté
Considérons 2 masses m1 et m2 qui peuvent se déplacer suivant l’axe (ox), m1 et m2 attachées à
2 points fixes par ressorts k1 et k2 .
Si on écarte les masses de leurs positions d’équilibre, les ressorts étant libres, chaque masse va
F IGURE 4.1 – Ressorts libres
osciller avec une pulsation propre :
s
ω01 =
k1
m1
s
;
ω02 =
k2
m2
Quelle est l’influence sur ce système si on relie les deux masses par un troisième ressort de
raideur k c ?
F IGURE 4.2 – Ressorts couplés
On écarte l’une des deux masses de sa position d’équilibre et on la relâche, le système prend
un mouvement oscillatoire.
28
4.1. OSCILLATIONS LIBRES D’UN SYSTÈME
À DEUX DEGRÉS DE LIBERTÉ
CHAPITRE 4. OSCILLATIONS COUPLÉES
Appliquons le PFD aux deux masses :
(
~1 + T
~c
~1 = T
m1 γ
~c0
~2 + T
~2 = T
m2 γ
~1 = −k1 x1 e~x
T
T
~2 = −k2 x2 e~x
~c = −k c ( x2 − x1 )~
ex
T
T
0
~c = − T
~c = k c ( x2 − x1 )~
ex
avec
la projection sur l’axe (ox) donne :
(
m1 x¨1 = −k1 x1 + k c ( x2 − x1 )
m2 x¨2 = −k2 x2 − k c ( x2 − x1 )
ou bien
(
m1 x¨1 = −(k1 + k c ) x1 + k c x2
m2 x¨2 = k c x1 − (k2 + k c ) x2
Si on résout ce système dans le dans le cas simple :
m1 = m2 = m
et
k1 = k2 = k
on aura un système différentielle dit "symétrique " :
(
m x¨1 = −(k + kc ) x1 + kc x2
m x¨2 = kc x1 − (k + kc ) x2
(1)
(2)
(4.1)
la somme ((1) + (2)) et la différence ((1) − (2)) des deux équations donne :
(
m( x¨1 + x¨2 ) = −k ( x1 + x2 )
m( x¨1 − x¨2 ) = −k ( x1 − x2 ) − 2k c ( x1 − x2 )
Pour résoudre ce système on fait le changement de variable suivant :
(
u = x1 + x2
v = x1 − x2
(4.2)
u et v sont appelés coordonnées normales.
Ce changement de variable permet de découpler les équations (on obtient 2 équations indépendantes l’une de l’autre), on aura alors :
(
mu¨ = −ku
mv¨ = −(k + 2k c )v
Posons :
r
ω1 =
k
= ω0
m
r
et
ω2 =
k + 2k c
m
(4.3)
Les pulsations ω1 et ω2 sont appelées pulsations propres du système d’oscillations couplés.
On obtient alors :
(
(
u¨ + ω12 u = 0
u(t) = Um cos(ω1 t + ϕ1 )
=⇒
2
v¨ + ω2 v = 0
v(t) = Vm cos(ω2 t + ϕ2 )
qu’on peut aussi écrire :
(
UNIVERSITÉ IBN TOFAIL
u(t) = A cos ω1 t + B sin ω1 t
v(t) = C cos ω2 t + D sin ω2 t
29
J.DIYADI
4.1. OSCILLATIONS LIBRES D’UN SYSTÈME
À DEUX DEGRÉS DE LIBERTÉ
CHAPITRE 4. OSCILLATIONS COUPLÉES
Si on choisit les conditions initiales suivantes :
x1 (0) = a0
x2 (0) = 0
x˙ 1 (0) = x˙ 2 (0) = 0
le système d’équation se réduit à :
(
u(t) = a0 cos ω1 t
v(t) = a0 cos ω2 t
L’équation (4.2) permet d’exprimer x1 (t) et x2 (t) en fonction de u et v :
1
x1 ( t ) = 2 ( u + v )
1
x2 ( t ) = ( u − v )
2
remplaçons u et v par leurs expressions en fonction de ω1 et ω2
a0
x1 (t) = 2 (cos ω1 t + cos ω2 t)
x2 (t) = a0 (cos ω1 t − cos ω2 t)
2
soit 1
4.1.1
ω1 − ω2
t
2
ω1 + ω2
t
x1 (t ) = a0 cos
2
cos
x (t ) = a sin ω1 + ω2 t
2
0
2
ω1 + ω2
sin
t
2
(4.4)
Cas du couplage faible
Reprenons le système d’équation (4.4) et rappelons les expressions de ses pulsations propres
ω1 et ω2 :
r
r
k
k + 2k c
ω1 =
= ω0
ω2 =
m
m
Posons
Ω = ω2 + ω1
2
ω = ω2 − ω1
2
le système s’écrit dans ce cas
(
x1 (t ) = a0 cos Ωt cos ωt
x2 (t ) = a0 sin Ωt sin ωt
(4.5)
Lorsque le couplage est faible
kc k
alors
ω2 ' ω1 ( 1 +
Ω ' ω ' ω
2
1
1. cos a + cos b = 2 cos
kc
)
k
(4.6)
a+b
a−b
a+b
a−b
cos
; cos a − cos b = −2 sin
sin
2
2
2
2
UNIVERSITÉ IBN TOFAIL
30
J.DIYADI
4.1. OSCILLATIONS LIBRES D’UN SYSTÈME
À DEUX DEGRÉS DE LIBERTÉ
CHAPITRE 4. OSCILLATIONS COUPLÉES
on déduit de la première équation du système (4.6) :
ω2 − ω1
kc
'
1
ω1
k
ω2 − ω1 ω1
=⇒
=⇒ ω Ω
"ω" petit lui correspond une période "T" grande, donc la fonction cos ωt va être l’enveloppe
à l’intérieur de laquelle évolue la fonction cos Ωt, (autrement dit, dans l’expression de x1 (t)
(équations 4.5) le terme "a0 cos ωt" joue le rôle d’une amplitude, on aura donc une fonction
sinusoïdale de fréquence Ω modulée par une fonction sinusoïdale de fréquence plus petite ω).
F IGURE 4.3 – Phénomène des battaments.
4.1.2
Pulsations et modes propres
• si v = 0 → x1 = x2 =
lorsque
um
cos(ω1 t + ϕ1 ) (pas de pulsation ω2 ), on en déduit alors que :
2
x1 = x2
on a un déplacement identique des deux mobiles ; on obtient dans ce cas un mode propre
associé à la pulsation ω1 , il s’agit d’un mode d’oscillation symétrique ( ou mode acoustique).
F IGURE 4.4 – symétrique
vm
• si u = 0 → x1 = − x2 =
cos(ω2 t + ϕ2 ) (pas de pulsation ω1 ) on en déduit dans ce cas
2
que : .
lorsque
x1 = − x2
On obtient un mode propre associé à ω2 , on a des déplacements opposés des deux mobiles ;
il s’agit d’un mode d’oscillation antisymétrique (ou mode optique).
• Les mouvements d’un système (stable) décrit par un système d’équation différentielle linéaire est le résultat d’une superposition de mouvements correspondants aux modes propres
du système.
UNIVERSITÉ IBN TOFAIL
31
J.DIYADI
4.1. OSCILLATIONS LIBRES D’UN SYSTÈME
À DEUX DEGRÉS DE LIBERTÉ
CHAPITRE 4. OSCILLATIONS COUPLÉES
• Ces modes propres sont des états d’oscillation ou tous les éléments du système vibrent avec
la même pulsation et qui est une pulsation propre du système.
• Si le système est initialement excité dans l’un de ses modes propres, il y reste par la suite.
Exemple : le couplage des pendules.
F IGURE 4.5 – symétrie et antisymétrique dans les pendules
4.1.3
Analogie électromécanique
Soit le circuit ci-dessous où l’on notera :
Q
V=
: tension aux bornes du condensateur ;
C
di
V = L : tension aux bornes de la self ;
dt
dQ
i=
la relation qui relie le courant à la charge.
dt
F IGURE 4.6 – Couplage électrique
UNIVERSITÉ IBN TOFAIL
32
J.DIYADI
4.2. OSCILLATIONS FORCÉES D’OSCILLATEURS
COUPLÉS
CHAPITRE 4. OSCILLATIONS COUPLÉES
L’application de la loi des mailles :
0
L di1 = Q − Q1
dt
C 00
C
di
Q
Q2
2
L
= 0 −
dt
C
C
En tenant compte de la relation charge-courant et de la conservation des charges :
Q1 + Q2 + Q 0 = 0
on aura
Q2
Q1
Q1
¨
L Q1 = − C 0 − C 0 − C
L Q¨ = − Q1 − Q2 − Q2
2
C0
C0
C
ou bien
1
1
1
¨
L Q1 = −( C 0 + C ) − ( C 0 ) Q2
1
1
1
¨
L Q2 = −( 0 ) Q1 − ( 0 + ) Q2
C
C
C
(4.7)
c’est un système d’équation équivalent au système (4.1).
Le tableau suivant explicite l’analogie qui existe entre la mécanique et l’électricité :
Mécanique
←→
kc
←→
x1
x2r
←→
←→
k
ω1 =
m
r
k + 2k c
ω2 =
m
4.2
←→
←→
Electricité
1
C0
Q1
−Q
r2
1
ω1 =
LC
r
1 1
2
ω2 =
( + 0)
L C C
Oscillations forcées d’oscillateurs
couplés
On s’intéressera uniquement au :
• système stable : le système a besoin d’être excité pour se mettre à évoluer
• petites oscillations : on restera dans le domaine d’évolution linéaire
4.2.1
Système oscillant à un degré de liberté
Oscillateur idéal
(idéal → pas de frottement)
Considérons 2 ressorts identiques (k, l0 ) qu’on relie par une masse m, une extrémité des deux
ressorts est fixe, alors que l’autre extrémité E est animé d’un mouvement xe (t) (fig.(4.7).
3 Au repos l’allongement de chaque ressort est (l − l0 )
3 En mouvement :
• le ressort de gauche est allongé de
( l − l0 ) + ( x − x e )
UNIVERSITÉ IBN TOFAIL
33
J.DIYADI
4.2. OSCILLATIONS FORCÉES D’OSCILLATEURS
COUPLÉS
CHAPITRE 4. OSCILLATIONS COUPLÉES
F IGURE 4.7 – oscillateur idéal
• le ressort de droite est allongé de
( l − l0 − x )
l’équation du mouvement s’écrit alors :
m x¨ = −k (( x − xe ) + (l − l0 )) + k (l − l0 − x )
soit
m x¨ = −2kx + kxe
|{z}
F (t)
F (t) apparait comme une force agissant sur la masse du ressort,
x¨ +
posons ω12 =
2k
k
x = xe
m
m
2k
m
x¨ + ω12 x =
F
m
Si xe est une fonction sinusoïdale :
xe = a0 cos Ωt,
F = kxe
→
F = ka0 cos Ωt
|{z}
F0
On cherchera des solutions sinusoïdales sous forme :
x (t) = A cos(Ωt − ϕ)
soit en notation complexe :
F = F0 e jΩt ,
on obtient alors :
−Ω2 A + ω12 A =
x = Ae jΩt
F0
;
m
A(Ω) =
F0
1
m (ω12 − Ω2 )
1
A(Ω) = F0
2
m ( ω1 − Ω 2 )
tan ϕ = 0
(4.8)
x(t ) = A(Ω) cos Ωt
(4.9)
A(Ω) fait apparaitre une résonance à Ω = ω1 , l’amplitude devient infinie lorsque le système
est excité avec sa propre fréquence (courbe gauche dans la figure 4.8).
UNIVERSITÉ IBN TOFAIL
34
J.DIYADI
4.2. OSCILLATIONS FORCÉES D’OSCILLATEURS
COUPLÉS
CHAPITRE 4. OSCILLATIONS COUPLÉES
F IGURE 4.8 – courbes de résonance : (courbe gauche) sans frottement, (courbe droite) avec frottement
Limitation de la résonance
En réalité les frottements sont inévitables et limitent la résonance, l’équation avec frottement
s’écrit :
ω1
F
F0
1
r
x¨ +
x˙ + ω12 x =
→
A(Ω) =
Q
m
m
ω Ω
(ω12 − Ω2 )2 + ( 1 )2
Q
A(Ω) est maximale si Ω prend la valeur :
s
Ω = ω10 = ω1
1−
1
6 = ω1
2Q2
or cette valeur ne peut exister que si :
1
Q> √
2
c’est la condition d’existence de résonance.
En conclusion
Pour un oscillateur harmonique à un degré de liberté, l’amplitude de ses déplacements
devient très importante, lorsqu’il a un bon facteur de qualité et lorsque la pulsation
d’excitation est très proche de sa propre pulsation.
4.2.2
Système à degré de liberté multiple
x¨ + 2ω2 x − ω2 x = F0 cos Ωt
1
0 1
0 2
m
x¨ + 2ω2 x − ω2 x = 0
2
0 2
0 1
r
avec
ω0 =
k
m
(4.10)
Pour découpler ces deux équations on pose :
(
u = x1 + x2
v = x1 − x2
UNIVERSITÉ IBN TOFAIL
35
J.DIYADI
4.2. OSCILLATIONS FORCÉES D’OSCILLATEURS
COUPLÉS
CHAPITRE 4. OSCILLATIONS COUPLÉES
F IGURE 4.9 – oscillateur multiple
on aura alors le système suivant :
F0
2
u¨ + ω1 u = m cos Ωt
v¨ + ω 2 v = F0 cos Ωt
2
m
avec
(
ω1 = ω0
√
ω2 = ω0 3
qui sont les pulsations propres du système
Les solutions de ce système s’écrivent
1
F0
cos Ωt
u =
2
m ( ω1 − Ω 2 )
F0
1
cos Ωt
v =
m (ω22 − Ω2 )
(4.11)
Les solutions x1 et x2 du système d’équation (4.10)
(
x1 = A1 (Ω) cos Ωt
x2 = A2 (Ω) cos Ωt
1
1
F0
+
)
( 2
A1 ( Ω ) =
2
2
2m (ω1 − Ω )
(ω2 − Ω2 )
avec
1
F0
1
−
)
( 2
A2 ( Ω ) =
2
2
2m (ω1 − Ω )
(ω2 − Ω2 )
(4.12)
Ces deux expressions font apparaitre deux résonances pour chaque amplitude.
Sur la figure (4.10) nous avons reporté les allures des deux courbes de resonance relatives aux
expressions données dans le système (4.12) et en dessous, deux autres courbes ou nous avons
representé (à titre indicatif)l’influence des frottements sur ces courbes.
Analogies électromécanique
Rappelons que les relations entre le courant électrique i et la charge électrique Q sont exactement de même nature que celles qui existent entre la vitesse x˙ et la position x d’un système
mécanique en translation :
Z
dQ
i=
ou bien Q = idt
dt
sont analogues à
Z
dx
˙
x˙ =
ou bien x = xdt
dt
UNIVERSITÉ IBN TOFAIL
36
J.DIYADI
4.2. OSCILLATIONS FORCÉES D’OSCILLATEURS
COUPLÉS
CHAPITRE 4. OSCILLATIONS COUPLÉES
F IGURE 4.10 – Couplage multiple
F IGURE 4.11 – analogie
Système forcé à un degré de liberté. Le système masse-amortisseur-ressort de la figure (4.11)
est régi par l’équation différentielle suivante :
m x¨ + α x˙ + kx = F (t)
L’écriture de la seconde loi de Kirchhoff
permet d’obtenir l’équation différentielle
qui régit le circuit RLC série ci-dessus
l’équation (4.13) peut s’écrire en fonction
de la vitesse x˙ sous la forme
m
d x˙
+ α x˙ +
dt
Z
(4.13)
˙ = F (t)
xdt
L
di
1
+ Ri +
dt
C
Z
idt = e(t)
Les équations différentielles qui régissent ces deux systèmes sont de même nature. Les deux
systèmes physiques sont dits analogues.
Exercice Établir, dans le cadre de l’analogie force-tension, le système électrique analogue au
système mécanique à deux degrés de liberté de la figure(4.12).
UNIVERSITÉ IBN TOFAIL
37
J.DIYADI
4.3. CHAINE D’OSCILLATEURS
CHAPITRE 4. OSCILLATIONS COUPLÉES
F IGURE 4.12 – Couplage de 2 ressorts
Solution démarche à suivre :
Ù Établir le système d’équations différentielles
m1 x¨1 + (α1 + α2 ) x˙ 1 + (k1 + k2 ) x1 − α2 x˙ 2 − k2 x2 = F (t)
m2 x¨2 + α2 x˙ 2 + k2 x2 − α2 x˙ 1 − k2 x1 = 0
Ù Regrouper les différents termes en mettant en facteur chaque grandeur correspondant à un
élément mécanique.
m1 x¨1 + α1 x˙ 1 + k1 x1 + α2 ( x˙ 1 − x˙ 2 ) + k2 ( x1 − x2 ) = F (t)
m2 x¨2 − α2 ( x˙ 1 − x˙ 2 ) − k2 ( x1 − x2 ) = 0
Ù Écrire le système d’équations différentielles sous la forme d’un système intégro-différentiel
Ù Établir la liste des éléments électriques analogues.
Ù Remplacer chaque terme du système d’équations mécanique par un terme électrique analogue. Ce qui permet d’établir le système d’équations intégro-différentiel électrique
Ù Construire le circuit électrique analogue en remarquant que les termes de ces deux équations sont respectivement la d.d.p aux bornes de L1 , R1 , C1 , R2 , C2 , e et L2 . Ces deux
équations représentent l’écriture de la seconde loi de Kirchoff pour deux mailles parcourues respectivement par les courants i1 et i2 et qui ont une branche commune contenant R2
et C2 et parcourue par le courant i = i1 − i2 .
4.3
Chaine d’oscillateurs
Les études faites pour 2 degrés de liberté peuvent se généraliser pour N oscillateurs couplés
identiques.
Lorsqu’un ensemble de N oscillateurs couplés (de bonne qualité) est soumis à une excitation
sinusoïdale permanente de pulsation ω, l’amplitude des mouvements des oscillateurs devient
importante.
Lorsque la pulsation de l’excitation s’approche de l’une des pulsation propres du système.
UNIVERSITÉ IBN TOFAIL
38
J.DIYADI
4.3. CHAINE D’OSCILLATEURS
CHAPITRE 4. OSCILLATIONS COUPLÉES
l’amplitude des oscillations décroit rapidement dés que la fréquence de l’excitation dépasse
celle du nième mode, de pulsation maximale. Au delà de cette pulsation, la déformation induite
n’est quasiment pas transmise par la chaine.
UNIVERSITÉ IBN TOFAIL
39
J.DIYADI
Deuxième partie
ONDES
40
Chapitre 5
Une approche
du phénomène de propagation
5.1
5.1.1
Le phénomène de propagation
Généralisation
Les phénomènes de propagation existent dans de nombreux domaines de la physique : propagation d’ondes électromagnétiques, du son ou de la "chaleur" sans que ces phénomènes soient
de même nature.
Les ondes électromagnétiques : l’onde lumineuse est une onde électromagnétique de longueurs d’ondes inférieures à 100 µm ) peuvent se propager dans le vide, se réfléchissent,
s’absorbent et se transmettent au niveau d’un milieu matériel.
F IGURE 5.1 – Onde électromagnétique
Les ondes mécaniques : les ondes acoustiques (le son) ont besoin d’un milieu matériel pour se
propager comme l’air par exemple.
F IGURE 5.2 – Onde mécanique
41
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
5.1. LE PHÉNOMÈNE DE PROPAGATION
La propagation de la "chaleur" est plus complexe : c’est une onde électromagnétisme dans le
cas du rayonnement dit "thermique", une onde mécanique dans le cas de la conduction
de la chaleur et un transfert de matière dans le cas de la convection.
Alors qu’une particule n’occupe à chaque instant qu’un seul point de l’espace , une onde est
caractérisée par son amplitude que l’on notera S(r, t), définie en tous les points de l’espacetemps. La nature mathématique de la fonction amplitude dépend du type de phénomène que
représente l’onde.
Surface d’onde : Le lieu des points où l’amplitude prend simultanément une même valeur
est appelée surface d’onde. Cette surface se déplace en bloc au cours du temps, déplacement
régi par un ensemble d’équations, appelées équations de propagation, faisant intervenir les dérivées de S(r, t) par rapport aux trois coordonnées d’espace et à celle de temps (Contrairement
aux équations du mouvement des particules qui sont des équations différentielles ordinaires
par rapport à la seule variable t).
5.1.2
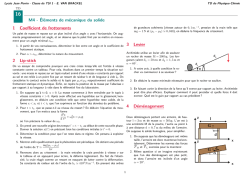
Les différents types d’ondes
Les modes de propagation
On peut distinguer 2 modes de propagations : ondes transversales et ondes longitudinales.
Les ondes transversales : la grandeur physique ~S n’a pas de composante selon la direction de
propagation.
Les ondes longitudinales : la grandeur physique ~S a une seule composante qui est la direction
de propagation.
F IGURE 5.3 – Les différents types d’ondes
les différentes natures d’ondes
Les ondes planes : la grandeur physique qui se propage possède à chaque instant la même
valeur en tout point d’un plan perpendiculaire à la direction de propagation.
Les ondes progressives : la grandeur physique ~S se propage dans une direction. Il n’y a pas
d’ondes dans le sens opposé.
UNIVERSITÉ IBN TOFAIL
42
J.DIYADI
5.2. ONDES DANS LA CHAINE
D’OSCILLATEURS
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
Les ondes stationnaires : la grandeur physique ~S ne se propage pas, mais son amplitude peut
dépendre de la position (T est la période temporelle, λ est la période spatiale).
F IGURE 5.4 – Ondes progressive et stationnaire
Les ondes planes polarisées :
• Rectilignement (ex : Sx = 0;
• Circulairement (ex : Sx = 0;
• Elliptiquement (ex : Sx = 0;
5.2
Sy = 0;
Sy 6= 0;
Sy 6= 0;
Sz 6= 0; )
Sz 6= 0;
Sz 6= 0;
avec
avec
Sy2 + Sz2 = cte)
aSy2 + bSz2 = cte)
Ondes dans la chaine
d’oscillateurs
Avant d’examiner la propagation d’onde d’une manière générale, on va s’intéresser d’abord
à la propagation d’une vibration le long d’une chaine d’oscillateur, on définira alors l’onde
monochromatique, l’onde progressive, la longueur d’onde et le vecteur, de même d’onde
correspondant.
Un solide est constitué d’empilement régulier d’atomes (molécules ou
ions) et pour la propagation des petits mouvements dans le solide, on peut
considérer que la force de rappel d’un atome vers sa position d’équilibre
est équivalente à la force de rappel du ressort.
C’est un très bon modèle pour la description de la propagation du "son"
dans un solide.
Pour simplifier, on s’interessera à la propagation à une seule dimension d’espace.
5.2.1
Équation de propagation dans la chaine d’oscillateurs
Considérons l’ensemble de N masses {m1 = m2 = m3 = · · · = m N −1 = m N = m} reliées entre
elles par un ensemble de ressorts identiques de raideur k.
L’équation du mouvement de la nième masse s’écrit :
F IGURE 5.5 – chaine d’oscillateurs
UNIVERSITÉ IBN TOFAIL
43
J.DIYADI
5.2. ONDES DANS LA CHAINE
D’OSCILLATEURS
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
m x¨ n = −k( xn − xn−1 ) + k( xn+1 − xn )
(5.1)
m x¨ n = kxn−1 − 2kxn + kxn+1
(5.2)
Cette équation est appelée équation de propagation de la déformation de la chaine d’oscillateurs par rapport à l’équilibre.
xn étant le déplacement de la nième masse par rapport à sa position d’équilibre.
Quand la masse d’indice (1) se déplace, elle va influencer sur la masse voisine d’indice (2) puisqu’elles sont reliées par un ressort (couplage), la masse d’indice (3) va être à son tour influencée
par (2) et ainsi de suite pour les autres masses voisines.
Chaque déplacement induit une force sur la masse voisine. Cette déformation de liaison entre
ces mobiles va se propager de proche en proche dans la chaine. La grandeur qui se propage (le
déplacement des masses) est une onde .
Donc la base des phénomènes de propagation des ondes est l’existence de deux grandeurs
(déplacement et forces) qui l’une crée l’autre le long de la chaine.
L’étude de la propagation d’une grandeur physique revient à établir son équation de propagation et définir sa vitesse de propagation.
5.2.2
Solutions harmoniques
L’équation (5.2) peut s’écrire :
x¨ n + ω02 (− xn−1 + 2xn − xn+1 ) = 0
avec
(5.3)
r
k
m
C’est une équation linéaire, la chaine est constituée d’oscillateurs couplés, cherchons alors des
solutions harmoniques (sinusoïdales).
Si ces solutions existent, elles s’écriront sous forme :
ω0 =
xn (t) = An cos(ωt + ϕ)
l’utilisation des notations complexes donne :
xn (t) → x n (t) = An e jωt
avec
An = An e jϕ
x n (t) est solution de l’équation (5.3) si les amplitudes complexes vérifient la relation de récurrence suivante :
ω02 An+1 + (ω 2 − 2ω02 ) An + ω02 An−1 = 0
Cherchons An sous la forme An = r n
L’équation caractéristique associée donne la relation suivante :
ω02 r 2 + (ω2 − 2ω02 )r + ω02 = 0
(5.4)
Le discriminent s’écrit alors :
∆ = ω 2 (ω 2 − 4ω02 )
Les solutions r1 et r2 vérifient
r1 r2 = 1
UNIVERSITÉ IBN TOFAIL
44
J.DIYADI
5.2. ONDES DANS LA CHAINE
D’OSCILLATEURS
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
Discussion :
• si ∆ > 0 (ω > 2ω0 )
les racines sont réelles et l’une des racines est plus grande que 1, la solution An qui est une
combinaison linéaires de r1n et r2n est divergente.
Solution à rejeter car elle n’est pas vérifiée dans le cas d’une chaine infinie d’oscillateurs
idéaux.
• si ∆ < 0 (ω < 2ω0 )
les racines r1 et r2 sont complexes conjuguées, ce qui conduit alors à des oscillations libres.
Les pulsations ω ne peuvent pas prendre n’importe quelle valeur, elles sont limitées par la
condition :
0 < ω < 2ω0
.
pour une écriture plus explicite on va exprimer cet intervalle par la relation suivante :
ω = 2ω0 sin
Φ
2
avec
o<ϕ< π
l’équation caractéristique va s’écrire :
r2 − 2r cos Φ + 1 = 0
les deux racines sont :
posons k =
Φ
a
r1 = e− jΦ
et
r2 = e+ jΦ
r1 = e− jka
et
r2 = e+ jka
La solution générale est une combinaison des solutions correspondantes à r1 et r2 .
An = A1 r1n + A2 r2n = A1 e− jnka + A2 e+ jnka
A1 = A1 e jϕ1
A2 = A2 e jϕ2
x(t )n = A1 e j(ωt −nka) + A2 e j(ωt +nka)
(5.5)
c’est une onde sinusoïdale se propageant le long de la chaine (on l’appelle onde car elle varie
dans le temps et dans l’espace).
Le déplacement de la nième masse x n (t) peut être considéré comme la valeur de la fonction
d’onde S( x, t) en x = na
S( x, t) = A1 e j(ωt−kx) + A2 e j(ωt+kx)
En notation réelle cette onde s’écrit :
xn (t) = S( x, t)(x=na)
xn (t ) = A1 cos(ωt − nka + ϕ1 ) + A2 cos(ωt + nka + ϕ2 )
(5.6)
L’équation de propagation impose une relation entre ω et k appelée relation de dispersion :
ω2 = 4ω02 sin2 (
UNIVERSITÉ IBN TOFAIL
ka
4K
ka
)=
sin2 ( )
2
m
2
45
(5.7)
J.DIYADI
5.2. ONDES DANS LA CHAINE
D’OSCILLATEURS
5.2.3
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
Onde monochromatique progressive
Considérons l’onde :
S( x, t) = A1 cos(ωt − kx + ϕ1 )
l’expression du déplacement de la nième masse qui se trouve en x = na
xn (t) = A1 cos(ωt − nka + ϕ1 )
Onde monochromatique
On dit aussi "onde harmonique" car la perturbation se propage avec une seule fréquence.
La lumière est constituée par des ondes électromagnétiques, la différence de couleur est due à
la différence de fréquence, à chaque fréquence correspond une couleur.
Onde progressive
La grandeur perturbée se déplace dans une seule direction (il n’y a pas d’onde dans le sens
opposé). Pour une même phase la fonction S( x, t) prend la même valeur si
ωt − kx = cte
Autrement dit la fonction S( x, t) prend la même valeur en x + ∆x à l’instant t + ∆t voir paragraphe (5.4)
ω
k∆x = ω∆t ⇒ ∆x = ∆t
k
nous pouvons dire que cette onde monochromatique caractérisée par sa phase, se déplace à la
vitesse de phase :
ω
vϕ =
(5.8)
k
L’onde S( x, t) se déplace et progresse le long de l’axe ox de la chaine à la vitesse v ϕ c’est une
onde progressive.
Remarque
De façon générale un signal physique, ici une onde, pourra se décomposer en une superposition de composantes harmoniques. Les déplacements correspondant aux oscillations
libres d’une chaine infinie d’oscillateur peuvent se mettre sous la forme d’une superposition
d’ondes progressives monochromatiques. Les fréquences de ces ondes sont situées dans une
bande permise.
5.2.4
Longueur d’onde, vecteur d’onde
Les ondes suivantes :
S+ ( x, t) = A1 e j(ωt−kx)
et
S− ( x, t) = A2 e j(ωt+kx)
ont la même fréquence, ces deux ondes progressives se propagent de façon similaire le long de
la chaine, mais dans des directions opposées (voir paragraphe(5.4)).
UNIVERSITÉ IBN TOFAIL
46
J.DIYADI
5.2. ONDES DANS LA CHAINE
D’OSCILLATEURS
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
vecteur d’onde :
A une onde progressive monochromatique
S+ ( x, t) = A1 e j(ωt−kx)
correspond un vecteur
~k = k~ex
appelé vecteur d’onde, il indique la direction de propagation de l’onde
k > 0 ⇒ propagation dans le sens(+);
k < 0 ⇒ propagation dans le sens opposé (-)
La pulsation et le vecteur d’onde sont reliés par la relation de dispersion ω (k) dont le graphe
est représenté sur la figure(5.6).
Le graphe est limité à la zone
−
π
π
<k<+
a
a
appelée première zone de Brillouin, première car les vecteurs k et k +
même solution physique xn (t).
2π
correspondent 1 à la
a
F IGURE 5.6 – 1ère zone de Brillouin.
Longueur d’onde :
Une onde progressive monochromatique a deux périodes :
2π
• la période temporelle T =
ω
2π
• la période spatiale ou longueur d’onde λ =
k
elles sont reliées par la relation :
λ = vϕT
5.2.5
(5.9)
Approximation des milieux continus
Dans le solide la distance "a" inter-atomique est très petite devant la longueur d’onde de propagation des ondes sonores λ,
aλ
Les déplacements xn (t) et xn+1 (t) entre les atomes proches voisins différent très peu, on peut
alors considérer que S( x, t) varie de manière quasi-continu.
1. 0 < ω < 2ω0 → 0 < φ < π → 0 < k <
UNIVERSITÉ IBN TOFAIL
π
a
47
J.DIYADI
5.3. ÉQUATIONS DE PROPAGATION
DE D’ALEMBERT
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
Équation de propagation
on pose S( x, t) x=(n+1)a = Sn+1 (t) et on fait développement au voisinage de x = na
S n +1 ( t ) = [ S + a
∂S a2 ∂2 S
+
+ · · · ] x=na
∂x
2! ∂2 x
S n −1 ( t ) = [ S − a
∂S a2 ∂2 S
+
+ · · · ] x=na
∂x
2! ∂2 x
l’équation différentielle (5.3)
S¨n = ω02 (Sn−1 − 2Sn + Sn+1 )
est transformée en une équation écrite différemment :
2
∂2 S( x, t)
2 2 ∂ S ( x, t )
=
ω
a
0
∂t2
∂t2
on pose
r
c = ω0 a = a
k
m
l’équation ci-dessus s’écrit alors
1 ∂2 S
∂2 S
−
=0
∂x2
c ∂t 2
(5.10)
on abouti à une équation de propagation connu sous de l’équation de d’Alembert unidimensionnelle.
5.3
Équations de propagation
de d’Alembert
On rencontre l’équation de propagation de d’Alembert dans plusieurs domaines, l’étude des
ondes planes, la déformation le long d’une corde, onde acoustique, champ électrique et champ
magnétique 2 , lignes de transmission. . . etc,
1 ∂2~
S
∆~
S− 2 2 = 0
c ∂t
(5.11)
où c est la vitesse caractéristique de la propagation.
L’onde S(r, t) peut être scalaire ou vectorielle, dans ce dernier cas on est conduit à trois relations
scalaires.
Exemple d’onde vectorielle
L’équation de propagation d’une onde électromagnétique dans le vide qui s’établit à partir des
4 équations de Maxwell dans le vide est une onde vectorielle.
~
~ ~E = − ∂ B
rot
∂t
div~E = 0
Equation de Maxwell-Faraday
Equation de Maxwell-Gauss
~
~ ~B = µ0 ε 0 ∂ E Equation de Maxwell-Ampère
rot
∂t
div~B = 0
Equation de Maxwell-Flux
2. ∆ =
∂2
∂2
∂2
+ 2 + 2 en coordonnées cartésiennes
2
∂x
∂y
∂z
UNIVERSITÉ IBN TOFAIL
48
J.DIYADI
5.3. ÉQUATIONS DE PROPAGATION
DE D’ALEMBERT
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
2~
~
~
~ ~
~ (rot
~ ~E) = −rot
~ ∂ B soit ∆~E = rot
~ ∂ B = ∂rot B = µ0 ε 0 ∂ E
rot
∂t
∂t
∂t
∂t2
la célerité de la lumière dans le vide, on obtient :
3
en posant c = √
1 ∂2 ~E
∆~E − 2 2 = ~0
c ∂t
avec
∆Ex =
∆~E = ∆Ey =
∆Ez =
1
qui est
µ0 ε 0
(5.12)
∂ 2 Ex
∂ 2 Ex
∂ 2 Ex
+
+
∂x2
∂y2
∂z2
2
2
∂ Ey
∂ Ey
∂2 Ey
+
+
∂x2
∂y2
∂z2
2
2
∂ Ez
∂ Ez
∂2 Ez
+
+
∂x2
∂y2
∂z2
En éliminant le champ électrique du système d’équation couplés, nous obtenons la même équation pour le champ magnétique
1 ∂2~B
(5.13)
∆~B − 2 2 = ~0
c ∂t
Remarque. Le phénomène de propagation ne doit pas être confondu avec un déplacement
de matière ; c’est pour marquer la différence que l’on désigne souvent "c" comme la "célérité",
le mot "vitesse" étant réservé au déplacement de matière.
5.3.1
Corde vibrante
Exemple de corde vibrante : une corde de guitare ou piano.
Considérons une corde de masse linéique µ. A l’équilibre la corde de longueur L = AB est
tendue, on peut alors negliger la force de la pesanteur. On notera :
F IGURE 5.7 – Onde propagée dans une corde.
• y( x, t) le déplacement à l’instant t d’un point M d’abscisse x.
• α( x, t) l’angle de la tangente à cette corde avec l’horizontale en x à l’instant t, (il repére l’inclinaison de la corde par rapport à l’horizontal).
• MM0 un élément de la corde de longueur compris entre les abscisses x et x + dx ayant la
masse µdx. (sur la figure les angles ont éxagérés pour la rendre lisible)
Soit l’élément de corde MM0 :
L’angle α( x, t) est très faible, il peut être confondu avec sa tangente
α( x, t) ' tan α( x, t) =
∂y( x, t)
∂x
La longueur élémentaire de la corde dl = MM0 vérifie :
r
q
dl =
dx2 + dy2 ≈= dx
1+(
∂y 2
) ≈ dx
∂x
~ (div~E)
~ (rot
~ ~E) = −∆~E + grad
3. rot
UNIVERSITÉ IBN TOFAIL
49
J.DIYADI
5.3. ÉQUATIONS DE PROPAGATION
DE D’ALEMBERT
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
F IGURE 5.8 – Element de la corde vibrante.
Le mouvement de la corde est négligeable dans la direction (ox) le point M se déplace suivant
(oy) les vibrations de la corde sont des ondes transversales.
Puisque le poids est négligé, l’élément de corde, de longueur dl ≈ dx, de masse dm = µdx, est
soumis à
• la tension de la portion de fil située à droite du point M0 , soit :
~T ( x + dx, t)
• la tension de la portion de fil située à gauche du point M0 , soit :
−~T ( x, t)
.
Le mouvement de la corde ayant lieu selon Oy , le théorème de la résultante cinétique appliqué
à cet élément de corde s’écrit :
∂2 y
~ey = ~T ( x + dx, t) − ~T ( x, t)
∂2 t
(5.14)
∂2 y
~ey = ( T sin α)( x + dx, t) − ( T sin α)( x, t)
∂2 t
(5.15)
dm
soit après projection sur Oy
dm
Au premier ordre en
∂y
,
∂x
dm = µdx,
En se limitant l’ordre 1 en
cos α( x, t) = 1
et
sin α( x, t) = α( x, t) =
∂y
∂x
∂y
l’équation (5.15) s’écrit :
∂x
∂( Tα)
∂2 y
=
dx
(5.16)
2
∂ t
∂x
Mais le module de la tension est une légère perturbation par rapport à sa valeur T0 au repos.
∂y
Au premier ordre en
,
∂x
Tα = T0 α
µdx
puisque l’angle α est un infiniment petit du premier ordre. L’équation 5.16 s’écrit alors, au
premier ordre :
∂2 y
∂y
∂2 y
µ 2 = T0
= T0 2
∂ t
∂x
∂ t
UNIVERSITÉ IBN TOFAIL
50
J.DIYADI
5.3. ÉQUATIONS DE PROPAGATION
DE D’ALEMBERT
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
qu’on peut aussi écrire
∂2 y
1 ∂2 y
−
2
∂ x
c ∂2 t
(5.17)
avec
s
c=
5.3.2
T0
µ
Lignes de transmission
Le câble coaxial d’une ligne électrique par exemple, est modélisé, dans le cas où les pertes
dans la ligne sont négligeables, par une succession de tronçons élémentaires de longueurs dz
considérés comme des quadripoles élémentaires auxquels sont associées une inductance Ldz et
une capacité Cdz avec L et C sont les inductances et capacité par unité de longueur (exprimés
respectivement en H.m−1 et F.m−1 ).
F IGURE 5.9 – Modelisation d’une ligne de transmission.
Loi des mailles
v(z, t) − v(z + ∆z, t)) = L∆z
Loi des nœuds
i (z, t) − i (z + ∆z, t)) = C∆z
∂i (z, t)
∂t
∂v(z, t)
∂t
En utilisant le développement en série de Taylor limité au 1er ordre 4 on obtient le système
d’équation
∂v(z, t) = − L ∂i (z, t)
∂z
∂t
(5.18)
∂i (z, t) = −C ∂v(z, t)
∂z
∂t
4. f (z + ∆z)) ' f (z) + ∆z
∂ f (z)
∂z
UNIVERSITÉ IBN TOFAIL
51
J.DIYADI
5.4. SOLUTION DE L’ÉQUATION
DE PROPAGATION
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
L’élimination de i ou v dans ce système couplé permet d’écrire l’équation de propagation
2
∂ v(z, t ) − LC ∂i (z, t ) = 0
∂2 t
∂t
2 i ( z, t )
∂
∂v(z, t )
− LC
=0
∂2 t
∂t
(5.19)
la vitesse de propagation de l’onde est
1
c= √
LC
5.4
Solution de l’équation
de propagation
Nous nous limitons dans la suite à l’équation de propagation de d’Alembert à une dimension
F IGURE 5.10 – Onde propagée.
∂2 S 1 ∂2 S
−
=0
∂x2
c ∂t2
x
u = t −
v
S = S( x, t), faisons le changement de variable
v = t + x
v
(5.20)
et cherchons S(u, v)
∂S
∂S ∂u ∂S ∂v
1 ∂S 1 ∂S
1 ∂S ∂S
=
+
=−
+
= ( − )
∂x
∂u ∂x
∂v ∂x
c ∂u
c ∂v
c ∂v ∂u
∂2 S
1 ∂ ∂S ∂S
1 ∂ ∂S ∂S ∂u 1 ∂ ∂S ∂S ∂v
=
( − )=
( − ) +
( − )
∂x2
c ∂x ∂v ∂u
c ∂u ∂v ∂u ∂x
c ∂v ∂v ∂u ∂x
∂u
1
∂v
1
=−
et
=
∂x
c
∂x
c
∂2 S
1 ∂2 S
∂2 S
1 ∂2 S
∂2 S
=
−
(
−
)
+
(
−
)
∂x2
c2 ∂u∂v ∂u2
c2 ∂v2
∂u∂v
soit
∂2 S
1 ∂2 S
∂2 S
∂2 S
=
(
−
2
+
)
∂x2
c2 ∂u2
∂u∂v
∂v2
(5.21)
∂S
∂S ∂u ∂S ∂v
∂S ∂S
=
+
=
+
∂t
∂u ∂t
∂v ∂t
∂u ∂v
∂2 S
∂ ∂S
∂ ∂S ∂S
∂ ∂S ∂S ∂u
∂ ∂S ∂S ∂v
= ( )= ( + )=
( + ) + ( + )
2
∂t
∂t ∂t
∂t ∂u ∂v
∂u ∂u ∂v ∂t
∂v ∂u ∂v ∂t
∂2 S
∂2 S
∂2 S
∂2 S
=
(
+
2
+
)
∂t 2
∂u2
∂u∂v
∂v2
UNIVERSITÉ IBN TOFAIL
52
(5.22)
J.DIYADI
5.4. SOLUTION DE L’ÉQUATION
DE PROPAGATION
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
En remplaçant les équations (5.21) et (5.22) dans (5.20) on obtient :
∂ ∂S
( )=0
2
∂u ∂v
∂ S
=0⇒
∂u∂v
∂ ( ∂S ) = 0
∂v ∂u
∂S
∂S
) ne dépend pas de v et ( ) ne dépend pas de u.
∂u
∂v
L’intégration de ces fonctions donne :
(
∂S
0
∂u = f (u)
⇒
S(u, v) = f (u) + C (v)
∂S = ∂C = g0 (v)
∂v
∂v
∂S = g0 (v)
∂v
→ C (v) = g(v)
enfin
S(u, v) = f (u) + g(v)
x
x
S(u, v) = f (t − ) + g (t + )
c
c
(5.23)
Quelle est la signification de ces deux fonctions
x
Si on considère la fonction f (t − ), l’amplitude de cette fonction est constante si
c
t−
x
= cte
c
si l’amplitude en x1 à l’instant t1 est égale à l’amplitude en x2 à l’instant t2 alors :
F IGURE 5.11 – Onde progressive.
t1 −
x1
x2
= t2 −
c
c
si
=⇒
x2
x
− 1 = t2 − t1
c
c
t2 − t1 > 0 =⇒ x2 > x1
c’est un signal qui se déplace dans le sens des x positifs.
x
f (t − ) est une onde progressive qui se propage à la vitesse c dans le sens des x croissants.
c
x
Pour le signal g(t + ) on doit avoir la relation :
c
x2
x
− 1 = −(t2 − t1 );
c
c
si
t2 − t1 > 0 =⇒ x2 < x1
il correspond alors à un signal qui se déplace dans le sens des x négatifs.
x
g(t + ) est une onde progressive qui se propage à la vitesse c dans le sens des x décroissants.
c
UNIVERSITÉ IBN TOFAIL
53
J.DIYADI
5.4. SOLUTION DE L’ÉQUATION
DE PROPAGATION
5.4.1
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
Solutions harmoniques
de l’équation de d’Alembert
Ondes planes progressives monochromatiques ou harmoniques
Nous nous sommes intéressés dans ce cours aux mouvements vibratoires de systèmes stables,
nous allons nous contenter alors de solutions à caractère sinusoïdal en fonction du temps, à
une seule dimension c’est à dire des solutions sous forme de :
∂2 S( x, t)
= ω 2 S( x, t)
∂2 t
Cherchons donc, en notation complexe, une solution sous la forme :
S( x, t) = U ( x )e j(ωt
Remplaçons dans l’équation de propagation
∂2 U ( x ) ω 2
+ 2 U (x) = 0
∂2 t
c
posons
k=
la solution générale est :
ω
c
U ( x ) = A1 e− jkx + A2 e jkx
avec
A1 = A1 e jϕ1
,
A2 = A2 e jϕ2
les solutions générales vont s’écrire en notation complexe :
S( x, t) = A1 e j(ωt−kx) + A2 e j(ωt+kx)
(5.24)
S( x, t) = A1 cos(ωt − kx + ϕ1 ) + A2 cos(ωt + kx + ϕ2 )
(5.25)
soit en notation réelle :
x
x
Dans le cas de solutions harmoniques f (t − ) et g(t + ) ont les expressions suivantes :
c
c
x
f (t − c ) = A1 cos ω(t −
x
g (t + ) = A2 cos ω(t +
c
k
ϕ1
x+
)
ω
ω
k
ϕ2
x+
)
ω
ω
(5.26)
Chaque expression caracterise une onde plane progressive monochromatique(OPPM)ou harmonique ,
Ý plane : parce que l’onde se propage dans une seule direction (ox).
Ý monochromatique l’onde se propage avec une fréquence unique, pour les ondes électromagnétiques, dans le domaine visible chaque fréquence correspond à une couleur bien définie.
5.4.2
Caracteristiques des ondes planes progressives monochromatiques
L’onde harmonique se propageant dans une direction parallèle à l’axe ox dans le sens des x
croissant possède une amplitude de la forme :
– en notation complexe
S( x, t) = Ae j(ωt−kx) avec A = Ae jϕ
UNIVERSITÉ IBN TOFAIL
54
J.DIYADI
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
5.5. ONDES STATIONNAIRES
– en notation réelle
S( x, t) = A cos(ωt − kx + ϕ)
Elle est caractérisée par sa pulsation ω et son vecteur d’onde
~k = k~ex
elle possède deux périodes :
– une période temporelle
T=
2π
ω
– une période spatiale
2π
k
la vitesse de propagation est égale à la vitesse de propagation de sa phase :
ω
vϕ =
k
λ=
Intêret de la notation complexe
La notation complexe facilite la résolution des équations différentielles utilisées dans les phénomènes étudiés car les dérivées partielles sont remplacées par des valeurs algébriques :
∂ j(ωt−kx)
e
= jωe j(ωt−kx)
∂t
5.5
et
∂ j(ωt−kx)
e
= − jke j(ωt−kx)
∂x
Ondes stationnaires
Déterminons la superposition S( x, t) de deux ondes harmoniques progressives S1 et S2 de
même fréquence, même amplitude A = A1 = A2 , phases a l’origine nulles ϕ1 = ϕ2 = o,
et de sens de propagation opposés :
S1 ( x, t) = A cos(ωt − kx ),
S2 ( x, t) = A cos(ωt + kx )
(5.27)
la superposition des deux ondes en un point d’abscisse x revient à calculer (en utilisant la
notation complexe) :
S( x, t) = S1 ( x, t) + S2 ( x, t) = A(e− jkx + e jkx )e jωt = 2A cos(kx )e jωt
(5.28)
et la partie réelle s’écrit alors
S( x, t ) = 2A cos(kx) cos(ωt )
(5.29)
L’expression cos(ωt − kx ), qui exprime la propagation, a disparu, on obtient alors une onde
qui ne se propage pas, c’est une onde stationnaire. C’est un mode de vibration où tous les
points vibrent en phase ou en opposition de phase : le point d’abscisse x vibre avec l’amplitude
2A|cos(kx )|.
L’amplitude de la vibration est nulle si
1 π
1 λ
cos kx = 0 ⇒ xn = (n + ) = (n + )
2 k
2 2
avec
n = . . . , −1, 0, 1, 2, . . . ,
cet ensemble de point, constitue ce qu’on appelle des nœuds.
λ
.
2
Au milieu de chacun de ces intervalles se trouvent les ventres de l’onde où l’amplitude de la
vibration est maximale.
nπ
n
cos kx = 0 ⇒ xn =
= λ
k
2
L’intervalle séparant deux nœuds consécutifs a pour longueur
UNIVERSITÉ IBN TOFAIL
55
J.DIYADI
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
5.5. ONDES STATIONNAIRES
F IGURE 5.12 – Onde stationnaire.
Remarque 1 On peut obtenir une onde stationnaire de forme plus générale
S( x, t) = 2A cos[k ( x − a)] cos ω [t − t0 ] = f ( x ) g(t)
(5.30)
avec un ventre en un point a arbitraire, en superposant les ondes
S1 ( x, t) = A cos(ωt − kx + ϕ1 ),
S2 ( x, t) = A cos(ωt − kx + ϕ2 )
et
(5.31)
avec
ϕ1 = ka − ωt0
ϕ2 = −ka − ωt0
et
Remarque 2 Une onde stationnaire est la superposition de deux ondes progressives harmoniques de même amplitude et de sens de propagation opposés. Inversement, une onde progressive harmonique est la superposition de deux ondes stationnaires de même amplitude.
Par exemple
A cos(ωt − kx ) = A cos(ωt) cos(kx ) + A sin(ωt) sin(kx )
(5.32)
5.5.1
Modes de vibration d’une corde fixée aux extrémités
Nous supposons que la corde de longueur L est fixée en x = 0 et x = L .
donc si
x=0
ou
x=L
alors
S( x, t) = 0
∀t
reprenons l’expression (5.30)
S(0, t) = 0 ⇒ ka =
π
⇒ cos k( x − a) = sin kx
2
dans ce cas S( x, t) va s’écrire
S( x, t ) = 2A sin kx cos ω[t − t0 ]
(5.33)
L’onde (5.33) a un noeud en x = 0 et un autre en x = L
S( L, t) = 0 ⇒ 2A sin kL cos ω [t − t0 ] = 0
l’onde s’annule seulement pour certaines valeurs λn de la longueur d’onde, qui vérifient
kL = nπ. Si on exprime k en fonction de la longueur d’onde on obtient :
L=n
UNIVERSITÉ IBN TOFAIL
λn
2
où
56
n = 1, 2, 3, . . .
(5.34)
J.DIYADI
CHAPITRE 5. UNE APPROCHE
DU PHÉNOMÈNE DE PROPAGATION
5.5. ONDES STATIONNAIRES
La condition (5.34) exprime que la longueur de la corde L est egale a n intervalles entre nœuds.
Les valeurs correspondantes k n de k sont :
kn =
2π
nπ
=
λn
L
où
Posons
ωn = k n c =
n = 1, 2, 3, . . .
(5.35)
nπc
L
nc
ωn
=
sont dites fréquences propres.
2π
2L
On appelle modes propres de vibration de la corde les solutions :
Les fréquences νn =
Sn ( x, t ) = An sin(kn x) sin(ωn + ϕn )
où
n = 1, 2, 3, . . .
(5.36)
La figure (5.13) représente la forme de la corde a un instant donné. Lorsque la fréquence fonda-
F IGURE 5.13 – Ondes stationnaires à extrémités fixées.
mentale est suffisamment elevée ( > 20Hz ), par suite de la persistance des images rétiniennes,
la corde prend l’aspect d’un fuseau (mode fondamental) ou de deux fuseaux (mode propre
n = 2). Ces fuseaux remplissent la surface limitée par les courbes
y = ± An sin(knx)
représentées en pointillés sur les figures, qui correspondent aux positions extrêmes de la corde.
λ
La longueur d’un fuseau est . Plus on augmente la fréquence plus le nombre de fuseaux
2
augmentent.
UNIVERSITÉ IBN TOFAIL
57
J.DIYADI
Troisième partie
EXERCICES
58
Chapitre 6
Exercices
6.1
Associations de ressorts
1. On assimile la double roue de certains véhicules à deux ressorts semblables en parallèle
(figure 6.1.(a)) de constante de raideur k et de longueur à vide l0 .
Déterminer les caractéristiques (k e , le0 ) du ressort équivalent. On note M la masse du
véhicule appuyant sur l’ensemble des deux ressorts.
2. Maintenant, si l’on s’intéresse seulement à une roue et son amortisseur (sans tenir compte
du système d’amortissement visqueux), on peut assimiler l’ensemble à deux ressorts
K1 , l01 et K2 , l02 en série(figure 6.1.(b)). Déterminer les caractéristiques du ressort équivalent. On note M la masse du véhicule appuyant sur l’ensemble des deux ressorts et A
le point de masse nulle entre les deux ressorts.
F IGURE 6.1 – ressorts en parallèles (a), ressorts en série (b)
6.2
Ressorts et Poulies
Soit un système constitué de deux ressorts de caractéristiques ( K1 , l01 ) et(K2 , l02 ) et de deux
poulies A et B reliés par un fil inélastique comme c’est indiqué sur la figure 6.2. Sous l’effet de
la masse M , l’extrémité du fil s’allonge de la quantité x0 à partir de la position à vide (prise
comme origine des abscisses).
1. Exprimer, x01 et x02 les déplacements des centres des poulies A et B à partir de leurs
positions à vide, en fonction deK1 , K2 , M et g. En déduire x0 .
On remplace ce système par un seul ressort équivalent, de raideur Ke et de longueur à
vide l0 . Exprimer Ke en fonction de K1 et K2 . Conclusion.
2. On écarte la masse de sa position d’équilibre, établir l’équation différentielle du mouvement (on prendra comme origine des abscisses l’extrémité fixe du ressort équivalent).
Chercher les solutions dans les cas suivants :
(a) On accroche la masse M au ressort et on la lâche (à t=0) sans vitesse initiale
59
6.3. ÉTUDE D’UN OSCILLATEUR
À L’AIDE DE SON PORTRAIT DE PHASE
CHAPITRE 6. EXERCICES
F IGURE 6.2
(b) On accroche la masse M au ressort et on la libère à l’instant t = t0 , en la poussant
avec une vitesse initiale v0 .
6.3
Étude d’un oscillateur
à l’aide de son portrait de phase
On fait l’étude d’un oscillateur M de masse M = 0, 2 kg astreint à se déplacer suivant l’axe Ox
de vecteur unitaire e~x . Il est soumis uniquement aux forces suivantes :
– la force de rappel d’un ressort de caractéristiques (K, l0 ).
– une force de frottement visqueux : ~f v = −αx e~x
– une force constante F~C = FC e~x
1.
(a) Établir l’équation différentielle du mouvement de M et la mettre sous la forme :
x¨ +
ω0
x˙ + ω02 = ω02 X0
Q
où x est l’allongement du ressort (par rapport à l0 ). Les grandeurs ω0 , Q et x0 sont à
exprimer en fonction des données.
(b) Dans le cas d’une solution pseudo-périodique, chercher l’expression de x (t) solution
de l’équation ci dessous, on définira le temps caractéristique τ et la pseudo-pulsation
Ω que l’on exprimera en fonction de ω0 et Q.
˙ x (t)) de l’oscillateur étudié est donné sur la figure (6.3 )
2. Le portrait de phase (v(t) = x,
On souhaite pouvoir en tirer les valeurs des différents paramètres de l’oscillateur.
(a) Quel est le type de mouvement ?
(b) Déterminer la vitesse et l’élongation au début et à la fin du mouvement
(c) Déterminer la vitesse maximale atteinte ainsi que l’élongation maximale.
(d) On donne les différentes dates correspondant aux croisements de la trajectoire de
phase avec l’axe des abscisses :
t(s)
0,31
0,65
0,97
1,3
1,62
En déduire le pseudo-période T et la pseudo-pulsation ω.
UNIVERSITÉ IBN TOFAIL
60
J.DIYADI
6.4. PROBLÈME (DEVOIR LIBRE)
CHAPITRE 6. EXERCICES
F IGURE 6.3 – diagramme de phase
(e) On définit le décrément logarithmique par
δ=
1
x (t) − x B (t)
ln
n x (t + nT ) − x B (t)
où x (t) sont les élongations aux instants t et t + nT (n entier naturel) et x B l’élongation finale de M. Exprimer δ en fonction de T et τ. En choisissant une valeur de n la
plus grande possible pour les données dont on dispose, déterminer δ puis τ.
(f) Déduire des résultats précédents le facteur de qualité Q et la pulsation propre ω0 .
(g) Déterminer la raideur du ressort K, le coefficient de frottement α et la force FC sachant que l0 = 1 cm.
6.4
Problème (Devoir libre)
F IGURE 6.4
On se propose d’étudier le comportement vibratoire de matériaux en caoutchouc (figure 6.4
(a)). en vue de leur utilisation dans la construction.
UNIVERSITÉ IBN TOFAIL
61
J.DIYADI
6.4. PROBLÈME (DEVOIR LIBRE)
CHAPITRE 6. EXERCICES
Pour leur modélisation, nous assimilons l’élasticité du matériau à celle d’un ressort de raideur
k et les pertes énergétiques par frottement à celles ayant lieu dans un amortisseur de coefficient
de frottement α. Le ressort et l’amortisseur ainsi considérés sont associés en parallèle (figure 6.4
(b)). On suppose, de plus, que le poids du caoutchouc est négligeable devant les forces mises
en jeu.
1. On place une masse m = 1 t sur un bloc en caoutchouc qui se comprime, alors, d’une
distance d.
Après une compression supplémentaire, la masse m relâchée prend un mouvement oscillatoire amorti autour de sa position d’équilibre que l’on repère par la coordonnée y. On
mesure l’intervalle de temps, ∆t séparant le 1er et le 6ème maximum. On trouve ∆t = 0, 2
s . La diminution d’amplitude correspondante est de 60%.
(a) Etablir l’équation différentielle du mouvement de la masse m.
(b) Donner la forme générale de la solution y(t). Comment varie l’amplitude des oscillations ?
(c) Déduire de ce qui précède les valeurs de k et α.
(d) On refait la même expérience avec un autre caoutchouc. On trouve α = 4, 5103
kg.s−1 . Au bout de combien de temps, ∆t0 , obtient-on la même diminution d’amplitude que dans l’expérience précédente ?
(e) Quel est le matériau le plus approprié pour la construction ?
2. Un caoutchouc avec les paramètres physiques k = 25.106 N.m−1 et α = 104 kg.s−1 est, à
présent, utilisé dans la construction d’un pont d’autoroute, de masse M = 12, 5 t. On assimile l’effet du passage des véhicules le pont à celui d’une force sinusoïdale d’amplitude
F0 = 103 N et de fréquence f , appliquée perpendiculairement au pont (Fig. 2).
F IGURE 6.5
(a) Ecrire l’équation du mouvement du pont pour la coordonnée y donnant son déplacement par rapport à l’équilibre.
(b) Donner l’expression du déplacement, y(t), en régime permanent, en fonction de la
fréquence.
(c) Quelle est la fréquence de résonance, f r du pont ? Montrer qu’on peut l’assimiler â
sa fréquence propre f 0 .
3. En déduire l’amplitude maximale à laquelle le pont peut vibrer. Quelle est la phase correspondante ?
4. Calculer l’énergie communiquée au pont pendant un intervalle de temps égal à une période, lorsque le passage des véhicules le fait vibrer à la résonance.
5. Calculer l’énergie correspondante qui se dissipe dans l’amortisseur, pendant le même
intervalle de temps. Conclusion ?
UNIVERSITÉ IBN TOFAIL
62
J.DIYADI
6.5. ETUDE DE LA RÉSONANCE( TP 2èmeSÉANCE )
6.5
CHAPITRE 6. EXERCICES
Etude de la résonance( TP 2èmeséance )
F IGURE 6.6
Une masse m = 0, 1kg accrochée l’extrémité R d’un ressort de raideur k = 20N/m peut se
déplacer sur un axe horizontale. On admettra que les frottements se réduisent à une force ~f =
−α~v où désigne la vitesse instantanée de la masse m. Le coefficient α est positif.
1. Oscillations libres amorties
L’extrémité E est fixe.
(a) Etablir l’équation différentielle caractéristique du mouvement du corps.
(b) Chercher les solutions x (t) et v(t) selon la valeur du coefficient d’amortissement.
• α = 5kg/s (régime apériodique)
• α = 0, 4kg/s (régime pseudo-périodique)
• α = 2, 828kg/s
On notera
k
α
ω02 = ;
2λ =
m
m
A.N
À t = 0 , x = x0 = 0, 05cm , v = v0 = 0, 25m/s
2. Oscillations forcées
Le point E effectue des oscillations sinusoïdales xe = a0 sin Ω autour de sa position
d’équilibre
3. Chercher les solutions de x (t)
4. Déterminer les maximums de x (t) et de v(t)
5. Déterminer la bande passante ∆Ω
6. Le coefficient de surtension Q
6.6
Modélisation d’un amortisseur
On considère l’amortisseur d’un véhicule (figure.6.7). Chaque roue supporte un quart de la
masse de la voiture assimilé à un point M de masse m = 500 kg et est reliée à un amortisseur
dont le ressort a une constante de raideur k = 2, 5.104 N.m−1 . Le point M subit aussi un frottement visqueux ~f v = −α~v où ~v est la vitesse de M et α = 5.103 kg.s−1 .
Le véhicule franchit à vitesse constante un défaut de la chaussée de hauteur h = 5 cm. Son
inertie est suffisante pour qu’il ne se soulève pas immédiatement mais acquiert une vitesse
verticale v0 = 0, 5 m.s− 1. On pose :
α
λ=
2m
On note Zi la cote du point M avant le passage du défaut.
1.
(a) On note Z (t) la cote de M. Établir l’équation différentielle pour Z après le passage
de l’obstacle. Déterminer Z (t) en fonction des données. On remarquera que λ = Ω
où Ω est la pseudo-pulsation.
(b) Les passagers sont sensibles à l’accélération verticale de la voiture, calculer sa valeur
maximale. On utilisera le fait que λ = Ω
UNIVERSITÉ IBN TOFAIL
63
J.DIYADI
6.7. SISMOGRAPHE (DEVOIR LIBRE)
CHAPITRE 6. EXERCICES
F IGURE 6.7 – amortisseur
2. Il faut en fait éviter des oscillations susceptibles de provoquer chez les passagers le mal
des transports, en se plaçant dans les conditions critiques. Pour quelle masse par roue
est-ce réalisé, K et l étant inchangés ?
6.7
Sismographe (Devoir libre)
On considère l’appareil schématisé figure 6.8. Il est
constitué d’un ressort de raideur K auquel est suspendu
une masse m de centre de masse M. La masse subit par
l’intermédiaire d’un système d’amortissement (qu’on ne
représentera pas sur la figure) une force de frottement
proportionnelle à sa vitesse ~v par rapport à la carcasse
métallique que l’on notera : le support C
~f = −α~v ( f > 0)
Le mouvement de la masse m par rapport au support C
s’inscrit grâce à un stylet sur un enregistreur (un tambour). On étudie ce mouvement lorsque C prend, par rapport au repère terrestre supposé galiléen, un mouvement
connu de direction verticale.
F IGURE 6.8 – sismographe
1. Expliquer qualitativement pourquoi, dans le cas de vibrations verticales rapides de C, le
stylet reproduit ces vibrations en vraie grandeur sur le tambour.
2.
(a) Pour l’étude des mouvements on utilise un axe vertical (z0 z) lié à la terre et orienté
vers le haut. On appelle zo (t) la cote sur cet axe à la date t du point de C coïncidant avec M à l’équilibre et z(t) = zo (t) + y(t) la cote du point matériel M. Former
l’équation différentielle vérifiée par y(t).
(b) On a z0 (t) = Z0 cos Ωt et on cherche y(t) en régime stationnaire sous la forme :
y(t) = Y cos(ωt + ϕ)
Y>0
Y
En utilisant la notation complexe, déterminer R =
en fonction de :
Z0
r
Ω
mω0
K
x =
et Q =
où ω0 =
(pulsation propre des oscillations libres non
ω0
α
m
amorties)
3. A partir de quelle valeur Q1 et de Q la fonction R( x ) passe-t-Comment choisir Q1 pour
que le domaine des pulsations pour lesquelles R ' 1 soit le plus étendu possible ?
UNIVERSITÉ IBN TOFAIL
64
J.DIYADI
6.8. COUPLAGE DE 3 RESSORTS
6.8
CHAPITRE 6. EXERCICES
Couplage de 3 ressorts
(session rattrapage 2012)
Entre le plafond en A , et le sol en B, sont accrochées en alignement vertical deux
masses identiques m grâce à trois ressorts. Le ressort central est de raideur K 0 ,
les deux autres sont de raideur K.
1. Si T est la tension du ressort central à l’équilibre, qui est étiré (allongé).
Quelle est la tension du ressort supérieur,
(a) En absence de pesanteur ?
(b) En présence de pesanteur g ?
2. Même question pour le ressort inférieur.
3. Dans la suite, on ne considérera que des mouvements verticaux, repérés
par des déplacements x1 et x2 des masses, par rapport à l’équilibre.
(a) Écrire les équations du mouvement et montrer qu’elles peuvent se mettre
sous6.9
la
F IGURE
forme
(
x¨1 + Ax1 = Bx2
x¨2 + Ax2 = Bx1
avec A > 0 et B > 0
(b) Donner les expressions de A et B en fonction de m, K et K 0 .
(c) Proposer un schéma électrique équivalent
4. Montrer que deux combinaisons linéaires indépendantes de x1 et x2 sont
solutions d’équations d’évolution découplées. Donner l’expression des pulsations propres. Observera-t-on des battements ? si oui donner l’expression
de la période des battements.
5. Donner la loi horaire x1 (t) correspondant aux conditions initiales :
x1 (0) = b, x2 (0) = x1 (˙ 0) = x2 (˙ 0) = 0 où b est un petit déplacement initial.
Représenter l’allure de x(t).
6. On applique à chacune des masses une même force supplémentaire de mesure algébrique
√
Fm cos 2 At
(a) Proposer un schéma électrique équivalent
(b) Quelle est la forme de la solution générale pour x1 + x2 et pour x1 − x2 ?
7. En présence de ces forces, quelle sera la solution x1 (t) si on adopte les
mêmes conditions initiales que précédemment x1 (0) = b, x2 (0) = x1 (˙ 0) =
x2 (˙ 0) = 0
6.9
Oscillateurs couplés
A) Oscillateurs couplés en régime libre
Une corde de longueur L tendue entre les points fixes O et A de l’axe vertical Oz porte en
M1 et M2 deux masses identiques m inégalement espacés, comme indiqué sur la figure . On
supposera que les angles αi sont petits et que les déplacements x1 et x2 des deux masses sont
de faible amplitude et selon l’axe Ox.
1. On suppose que la tension de la corde garde un module constant T , très grand devant
le poids des masses, que l’on négligera. Ecrire, à partir de la relation fondamentale de la
dynamique, les équations du mouvement des masses en fonction des variables α1 , α2 , α3 .
UNIVERSITÉ IBN TOFAIL
65
J.DIYADI
6.9. OSCILLATEURS COUPLÉS
CHAPITRE 6. EXERCICES
F IGURE 6.10
2. Exprimer les variables α1 , α2 et α3 en fonction de x1 et x2 , en précisant les approximations
faites, puis montrer que lesréquations du mouvement peuvent s’écrire, en fonction des
T
variables x1 , x2 et de ω0 =
sous la forme :
mL
(
x¨1 + ω02 (5x1 − 2x2 ) = 0
x¨2 + ω02 (−2 + 8x2 ) = 0
3. On cherche des solutions sinusoidales sous la forme complexe :
x1 = a1 e jωt
;
x2 = a2 e jωt
r
T
mL
4. En déduire les modes propres du système, puis en donner une représentation graphique.
Déterminer les pulsations propres du systéme en fonction de ω0 =
5. Donner l’expression la plus générale pour le mouvement des masses en notation réelle.
6. Ce mouvement est-il périodique ? Si oui donner sa période en fonction de ω0 .
7. Au temps t = 0 les deux masses sont lâchées sans vitesse initiale depuis les positions
x1 = 0 et x2 = 0. Déterminer les lois du mouvement réelles x1 (t) et x2 (t).
B) Oscillateurs couplés en régime forcé
On reprend le système de la partie A) mais on applique maintenant à la masse dont la position
d’équilibre est M , une force sinudoidale selon Ox : F = F0 cos(ωt)~ex
1. Expliquer qualitativement la différence principale entre le régime d’oscillations libres et
le régime d’oscillations forcées pour un système d’oscillateurs couplés.
2. Ecrire, avec les memes approximations que pour la partie A), les équations du mouvement en fonction des variables x1 et x2 .
UNIVERSITÉ IBN TOFAIL
66
J.DIYADI
6.10. COUPLAGE DE PENDULES SIMPLES IDENTIQUES
CHAPITRE 6. EXERCICES
3. On cherche des solutions sinusodales sous la forme complexe :
x1 = a1 e jωt
,
x2 = a2 e jωt
r
Déterminer les amplitudes a1 et a2 en fonction de ω et ω0 =
l’expression complexe de la force excitatrice :
T
. Pour cela on utilisera
mL
F = F0 e jωt
4. Expliquer qualitativement ce qu’il se passe lorsque la pulsation de la force excitatrice
devient égale à l’une des pulsations propres trouvées en A). Les singularités observées
ont-elles un sens physique ? Qu’en est-il dans la réalité en présence de forces de frottement ?
6.10
Couplage de pendules simples identiques
On considère trois pendules simples identiques de masse m, de longueur l. Les masses reliées
entre elles par l’intermédiaire de deux ressorts de raideur k1 et k2 . A l’équilibre les pendules
F IGURE 6.11 – Pendule couplés par des ressorts
sont verticaux, les trois masses sont équidistantes sur une même horizontale, les ressorts ont
leur longueur naturelle. Le système en mouvement est défini par les élongations angulairesθ1 ,
θ2 et θ3 des pendules avec la verticale descendante on posera :
ω02 =
k
m
et
Ω20 =
g
l
k1 = k et k2 = 0
1. Établir l’équation différentielle caractéristique du mouvement du corps.
2. Comparer à l’exercice précèdent
3. Chercher les solutions pour les conditions initiales suivantes : à t = 0 on a θ1 = 0 ; θ2 = θ0 ;
θ˙1 = θ˙2 = 0
k1 = k2 = k
4. Écrire les équations différentielles des petites oscillations du système
5. Déterminer les pulsations propres.
UNIVERSITÉ IBN TOFAIL
67
J.DIYADI
6.11. COUPLAGE RESSORT-PENDULE (1)
6.11
CHAPITRE 6. EXERCICES
couplage ressort-pendule (1)
On considère un pendule constitué d’une tige de longueur l rigide de masse négligeable. Elle peut tourner librement sans frottement autour d’un axe ∆ passant par
son extrémité supérieure O. À l’extrémité inférieure M
est fixée une masse m que l’on suppose ponctuelle. Par
ailleurs, ce pointM est relié à deux ressorts identiques
(k, l0 ) eux-mêmes accrochés à des points symétriques A
et B de façon que lorsque l’ensemble est en équilibre la
tige OM est verticale. On écarte très légèrement le système de cette position d’équilibre.
En appliquant le théorème du moment cinétique en O,
montrer que le mouvement est harmonique et que la péF IGURE 6.12 – couplage penduleriodes des petites oscillations s’écrit :
ressort
2π
r
g 2k
+
l
m
couplage ressort-pendule (2)
Dans le montage représenté sur la figure ci-contre, une tige de
masse M et de longueur l peut osciller sans frottement autour
du point fixe O. Son moment d’inertie J par rapport à O est
1
J = Ml 2 et son centre de masse G est situé au milieu de la tige.
3
La position de cette barre est repérée par l’angle θ comme indiqué sur la figure. Cette tige est couplée par l’intermédiaire d’un
ressort horizontal de raideur k C au système oscillant constitué
M
et du ressort de raideur k dont
du chariot de masse m =
F IGURE 6.13 –
3
0
l’extrémité O est fixe. A l’équilibre, le pendule est vertical et pendule-ressort
les deux ressorts ont leur longueur naturelle (ressorts non déformés). On posera :
r
r
r
k
3g
kC
ω1 =
;
ω2 =
;
ωc =
m
2l
m
couplage
Les déplacements x1 (t) du centre de masse G du chariot et x2 (t) de l’extrémité A du pendule, à
partir de leur position d’équilibre, sont suffisamment petits pour admettre que les deux ressorts
demeurent pratiquement horizontaux. Pour les applications numériques on prendra les valeurs
suivantes :
g = 9, 81ms−1 ; l = 0, 67m ; m = 0, 10kg et k = k c = 1N.m−1
1. système couplé On s’intéresse tout d’abord au chariot et au pendule isolés, c’est à dire
non couplés par l’intermédiaire du ressort de raideur k c .
(a) A l’aide de la relation fondamentale de la dynamique de translation, écrire l’équation
différentielle en x1 (t) du mouvement du chariot. Déterminer la pulsation propre du
mouvement et la période propre T1 (on effectuera les applications numériques)
(b) A l’aide de la relation fondamentale de la dynamique de rotation, écrire l’équation
différentielle en θ (t) du mouvement du pendule dans l’approximation des petits
angles. Déterminer la pulsation propre du mouvement et la période propre T2 (on
effectuera les applications numériques)
2. Oscillations libres et modes propres du système couplé.
(a) Quelle est la relation entre x1 (t) et θ dans l’approximation des petits angles ?
UNIVERSITÉ IBN TOFAIL
68
J.DIYADI
6.12. COUPLAGE RESSORT-BARRE (1)
CHAPITRE 6. EXERCICES
(b) Montrer que les deux équations différentielles du mouvement en x1 (t) et x2 (t)
s’écrivent sous la forme :
d2 x1
+ (ω12 + ωc2 ) x1 − ωc2 x2 = 0
dt2
et
d2 x2
+ (ω22 + ωc2 ) x2 − ωc2 x1 = 0
dt2
(c) établir l’équation aux pulsations propres. Pour en simplifier l’écriture, on utilisera :
0
ω12 = ω12 + ωc2
et
0
ω22 = ω22 + ωc2
(d) Quelles sont les liaisons entre les deux oscillateurs quand k c = 0 et quand k c → ∞ ?
dire brièvement ce qu’on observe lorsqu’on produit des oscillations.
(e) Donner les solutions Ω0 et Ω” de l’équation aux pulsations propres en fonction de
0
0
ω12 et ω22 . On prendra Ω0 < Ω”. Calculer numériquement Ω0 et Ω”. Les comparer à
0
0
ω12 et ω22 .
6.12
Couplage ressort-barre (1)
On considère le système mécanique ci-contre
constitué d’une tige de longueur L et de masse négligeable pouvant tourner dans un plan vertical autour de son axe fixe ∆.
Le point A est relié à un bâti fixe par un amortisseur
de coefficient de frottement visqueux α. A l’autre
extrémité de la tige est fixée une masse ponctuelle
M qui est reliée à un second bâti fixe par un ressort
de raideur K. On se place dans le cas des oscillations libres de faible amplitude.
F IGURE 6.14 – couplage ressort-barre
1. Etablir l’équation différentielle du mouvement satisfaite par θ
2. Lorsque le système est abandonné sans vitesse initiale, il effectue des oscillations amorties
de période T = 0.1 s, dont l’amplitude diminue de moitié au bout de 5 périodes.
Calculer le coefficient d’amortissement α sachant que M = 0.5 kg.
6.13
Couplage ressort-barre (2)
(Devoir libre)
(Extrait contrõle (2012))
Soit une barre (AB), homogène, de centre de gravité O
fixe, de masse m et de longueur 2L, placée dans le champ
de pesanteur, comme l’indique la figure ci-dessous. On
envisage les petites oscillations de la barre (AB) dans le
plan vertical fixe (Ox, Oy) autour de son centre de gravité
O.
Le moment d’inertie de la barre est J, un amortisseur de
coefficient α applique sur la barre une force de frottement
proportionnelle à la vitesse au point A, à l’équilibre la
longueur du ressort est l0 = h.
F IGURE 6.15 – couplage ressortbarre
1. θ étant l’angle que fait la barre avec l’axe Ox
(a) établir l’équation différentielle relative au mouvement de la barre
(b) discuter, selon les valeurs de α , les différentes solutions possibles de cette équation
à t = 0 θ (0) = 0 θ˙ = 0
UNIVERSITÉ IBN TOFAIL
69
J.DIYADI
6.14. COUPLAGE RESSORT-BARRE (2)
CHAPITRE 6. EXERCICES
(c) dans le cas du régime pseudo-périodique, préciser la pseudo-période T et le décrément logarithmique δ en fonction des données.
2. On applique une force verticale sinusoïdale F = F0 cos(Ωt) au point B et on néglige les
frottements.
(a) Réécrire l’équation différentielle du mouvement et chercher la solution en régime
permanent sous forme de θ (t) = A(Ω) cos(Ωt + Φ(Ω)) , A(Ω) et Φ(Ω) sont à déterminer en fonction des données
(b) Quelle est la pulsation de résonance ? Représenter les allures de A(Ω) et Φ(Ω)
(c) Pour quelles valeurs de Ω, la valeur de A(Ω) devient inférieure à 5% de A(Ω = 0)
(d) On remplace la barre (AB) par une masse ponctuelle M attachée au point B. Quelle
doit être la valeur de M si on veut garder exactement le même mouvement de l’ex1
trémité B ? ( j = mL2 )
3
(e) Quelle est l’analogie électrique de ce système ?
6.14
Couplage ressort-barre (2)
(Extrait contrõle terminal(2013))
On considére une barre de longueur OA = 2L et de masse m1 . On notera J son moment d’inertie
par rapport à O. Deux ressorts de raideurs k1 et k2 sont accrochés à la barre aux points A et G,
ce dernier point est situé au milieu de OA (OG = L).
Une masse m2 est accrochée à l’extrémité du ressort 2.
A léquilibre :
F IGURE 6.16
θ = x = x1 = x2 = 0
.
1. µ est la masse lineique de la barre. La barre est homogene de masse m1 et de longueur 2L,
calculer le moment d’inertie I
2. A l’équilibre, les 2 ressorts sont allongés sous l’effet des masses m1 et m2 , on écrira les
équations de la dynamique uniquement pour les forces supplémentaires par rapport à
l’équilibre,écrire les équations du mouvement que doivent satisfaire x1 et x2
4m1
3k2
k2
3. chercher les modes propres en prenant m2 =
et k1 =
, on posera ω02 =
3
8
m2
UNIVERSITÉ IBN TOFAIL
70
J.DIYADI
6.15. PROPAGATION D’ONDE
6.15
CHAPITRE 6. EXERCICES
Propagation d’onde
On se propose d’étudier la propagation d’une onde dans un tuyau cylindrique de section S,
d’axe Ox rempli d’air de masse volumique ρ = 1, 29 kg.m−3 et de coefficient de compressibilité
adiabatique χ = 6, 58910−6 unité SI.
Les transformations subies par le fluide lors du passage de l’onde seront considérées comme
étant adiabatiques.
La section droite du fluide qui, au repos, se trouve dans le plan d’abscisse x, se déplace au
passage de l’onde, au temps t au point d’abscisse x + S( x, t). On montre que :
∂2 S( x, t)
∂2 S( x, t)
−
ρχ
=0
∂x2
∂t2
(6.1)
et on rappelle la définition du coefficient de compressibilité en fonction de la pression P et du
volume V :
∂V
χ=−
(6.2)
∂P
Onde progressive
1. Quelle est la signification physique de χ ? Pourquoi est-elle affectée d’un signe négatif ?
En quelle unité peut-on l’exprimer ?
2. Donner la vitesse c de propagation de l’onde et calculer sa valeur numérique.
3. Donner sans démonstration, l’expression la plus générale de la solution de l’équation 6.1
et interpréter chaque terme.
4. Le tuyau est semi-infini et l’onde se propage dans le sens des x croissants. On donne au
point O (extrémité du tube) un mouvement sinusoidal d’expression
S( x, t) = S0 cos ωt
Exprimer S( x, t) et v( x, t) =
deurs ?
∂S( x, t)
fonction de S0 , c, x et t. Que représentent ces gran∂t
5. La pression P est de la forme P = Patm + p( x, t) où la surpression p( x, t), par rapport à la
pression atmosphérique constante Patm , est de la forme :
p( x, t) = −
1 ∂S( x, t)
χ ∂x
(6.3)
(a) donner l’expression de p( x, t) et montrer que p( x, t) = ρcv( x, t).
(b) L’intensité I d’une onde sonore est le travail effectué sur une section de fluide par
unité de temps et de surface, donner l’expression de I.
(c) Déterminer l’intensité moyenne < I > de l’onde en fonction de S0 ,c,ω etρ.
(d) Application : Le seuil de l’audition de l’oreille humaine pour une fréquence de 1000
Hz, correspond à une intensité moyenne < I >= 2, 510−12 w.m−2 . Calculer l’amplitude de déplacement correspondante.
Onde stationnaire
Le tuyau une longueur L quelconque et on se place à des instants t l’onde sonore dans le tuyau est de la forme :
P( x, t) = Ae j(ωt−kx) + Be j(ωt+kx)
UNIVERSITÉ IBN TOFAIL
71
L
. On suppose que
c
(6.4)
J.DIYADI
6.15. PROPAGATION D’ONDE
CHAPITRE 6. EXERCICES
1. En utilisant ces conditions aux limites
p(0, t) = p( L, t) = 0
determiner l’expression réelle de la pression acoustique p( x, t) ainsi que les fréquences
des ondes stationnaires qui peuvent s’établir dans le tuyau.
2. En déduire, à partir de la relation (6.3), l’expression réelle de S( x, t).
3. Représenter graphiquement p( x, t) et S( x, t) pour les 3 premiers modes de vibration.
4. Donner l’expression de l’énergie moyenne par unité de longueur dans le tuyau pour le
mode de vibration de rang n.
UNIVERSITÉ IBN TOFAIL
72
J.DIYADI
© Copyright 2026 Paperzz