Onduleurs de tension
Mise en œuvre
par
Henri FOCH
Professeur des universités
Laboratoire d’Électrotechnique et d’Électronique industrielle
ENSEEIHT de Toulouse
François FOREST
Professeur des universités
Laboratoire d’Électricité Signaux et Robotique
École Normale Supérieure de Cachan
et
Thierry MEYNARD
Chargé de recherche au CNRS
Laboratoire d’Électrotechnique et d’Électronique industrielle
ENSEEIHT de Toulouse
1.
1.1
1.2
1.3
Techniques de modulation (filtrage actif) .........................................
Les grandes familles de modulation..........................................................
Dynamique des tensions de sortie d’un onduleur triphasé .....................
Commandes en courant..............................................................................
2.
2.1
2.2
Filtrage passif ...........................................................................................
Filtrage d’entrée...........................................................................................
Filtrage de sortie ..........................................................................................
—
—
—
10
10
12
3.
Réalisation, commande et protection d’un bras d’onduleur .......
—
13
3.1
3.2
Composants de puissance ..........................................................................
Transmission dynamiquement isolée des signaux
et de la puissance de commande...............................................................
Retards et temps morts...............................................................................
Protections ...................................................................................................
Conception du circuit de puissance ...........................................................
—
13
—
—
—
—
15
17
18
19
Références bibliographiques .........................................................................
—
20
3.3
3.4
3.5
D 3 177 – 2
—
2
—
6
—
8
a problématique de la génération alternative de tension à partir de structures fonctionnant en commutation a été abordée de façon générale (notion
de réglage temporel et de réglage par niveau) dans l’article « Structures. Principes. Applications ». Dans cette partie « mise en œuvre », il convient d'apporter
quelques précisions sur les différentes techniques de modulation utilisées
dans la commande des onduleurs, sur leurs caractéristiques et sur les grandes
lignes de leur mise en œuvre.
Rappelons que l'objectif principal de ces techniques, appliquées aux onduleurs, est de permettre l'obtention d'ondes de tension alternatives, d'amplitude
et de fréquence fondamentale réglables, en éliminant ou en repoussant le plus
loin possible les composantes harmoniques parasites résultant du découpage.
Leur utilisation correspond, finalement, à un principe de filtrage actif via la
commande, filtrage actif auquel sera associé, la plupart du temps, un filtrage
passif dont nous aborderons la problématique dans le paragraphe suivant.
Quelle que soit la forme de l'onde alternative recherchée (le plus souvent sinusoïdale), l'établissement de la stratégie de commande devra, tout d'abord,
prendre en compte deux contraintes de régime permanent qui sont, d'une part,
L
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 1
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
la minimisation des composantes harmoniques parasites et, d'autre part,
l'exploitation optimale de l'étage de puissance de l'onduleur (dimensionnement)
pour générer les composantes harmoniques utiles.
L'autre aspect qui devra également être considéré est la façon dont ces techniques vont pouvoir s'insérer dans les boucles de contrôle et de régulation qui
sont obligatoirement présentes dans toutes les applications des onduleurs. Il est
donc important d'aborder la question de leur potentiel dynamique.
Le lecteur pourra se reporter à l’article [D 3 176] « Onduleurs de tension. Structure. Principes.
Applications » [4] et aux références [1] à [3].
1. Techniques de modulation
(filtrage actif)
A
Porteuse
triangulaire
Consigne
1.1 Les grandes familles de modulation
t
1.1.1 Classification
Par référence à l'aspect dynamique, nous proposons un classement en deux grandes familles de techniques MLI (modulation de
largeur d’impulsion).
La première rassemble les stratégies autorisant des modifications
de la largeur d'impulsion imposées par les variations d'une grandeur instantanée générée par les organes de contrôle, à l'échelle de
la période de découpage Td. On parle alors de MLI instantanées , qui
peuvent être locales (commande d'une cellule) ou globales (gestion
vectorielle de la commande de plusieurs cellules). Elles correspondent généralement à des cas pour lesquels la fréquence de découpage Fd est grande devant la fréquence fondamentale Fs :
n = Fd/Fs > 20
■ La seconde inclut les stratégies dans lesquelles les formes de
l'onde découpée sur une période fondamentale sont calculées a
priori pour minimiser les composantes harmoniques parasites, à
valeur donnée de la composante fondamentale. Les résultats de ces
calculs sont mémorisés puis utilisés selon les besoins en cours de
fonctionnement. En toute rigueur, on ne peut alors changer de
configuration qu'à l'échelle de la période de modulation Ts (éventuellement, Ts/4 en monophasé, Ts/6 en triphasé).
1.1.2 MLI instantanées dédiées à une cellule
Ce premier groupe correspond à une approche décentralisée de la
commande d'un onduleur polyphasé, au sens où chaque bras est
muni d'un modulateur piloté par une onde modulante qui lui est
propre (commande monophasée). Le principe général consiste à
générer un signal à fréquence de découpage Fd fixe, dont la largeur
d'impulsion est une fonction linéaire d'une grandeur de consigne.
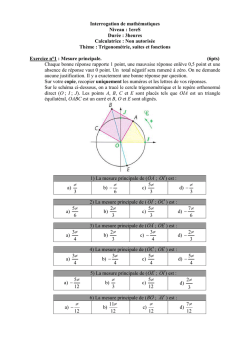
Cela peut être, indifféremment, réalisé de façon analogique ou
numérique (figure 1), la consigne étant soit une grandeur à temps
continu, soit un mot binaire généré par un organe de commande
numérique. Ce dernier cas est maintenant le plus répandu, en particulier dans les structures triphasées, du fait du développement considérable des techniques et composants numériques et de leur très
bonne adéquation à la complexité d'une commande polyphasée.
■ Les modulateurs analogiques fonctionnent par comparaison
d'une porteuse triangulaire ou en dent de scie avec une consigne
analogique (exemple figure 1 a). On parle souvent de MLI
D 3 177 − 2
RTd
a
Fréquence
d'échantillonnage
Fec < Fd
t
Td
MLI analogique
Fréquence
d'horloge
FH = nFd
Largeur propre à NB
Commande
numérique
globale
Générateur
d'impulsions
numérique
("timers ")
n bits
NB
Td
A amplitude
R rapport cyclique
b
MLI numérique
Figure 1 – Structures de principe des modulateurs
« intersective ». La fréquence de cette porteuse détermine la fréquence de découpage et une variation de la consigne induit une
variation de la largeur d'impulsion au plus tard après une période de
découpage.
■ Les modulateurs numériques (figure 1 b) sont réalisés à partir
de compteurs programmable pilotés par une fréquence d'horloge
très supérieure à la fréquence de découpage :
F H = n ’F d ,
résolution de Td/n’ sur le contrôle de la largeur d'impulsion ; ces
compteurs permettent la génération d'une impulsion dont la largeur
dépend du mot binaire (NB) de programmation. Si la commande
numérique générant ce mot binaire présente une fréquence
d'échantillonnage Fec au moins égale à la fréquence de découpage,
la dynamique est similaire à celle du cas précédent (retard d'une
période de découpage).
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
Tableau 1 – Exemples de modulations instantanées
a – MLI monophasée bipolaire
Amplitude des raies
A
0
t
(fm)bip
+1
t
–1
R
n
∞
∑
( f m ) bip = m sin ω s t +
h
=
hπm
hπ
sin ------- J 0 ------------- cos nhω s t +
2
2
h
1
4 ( –1 )
-----------------πh
hπ
+ cos ------2
∞
∑
p=0
∞
∑
p=1
h π m cos ( nh + 2 p ) ω s t
J 2 p -------------
+ cos ( nh – 2 p ) ω s t
2
h π m sin ( nh + 2 p + 1 ) ω s t
J 2 p + 1 -------------
2
– sin ( nh – 2 p – 1 ) ω s t
b – MLI monophasée unipolaire à 2 Fd
Amplitude des raies
A
0
t
t
+1
t
(fm)unip
t
R
–1
n
(cf. [D 3176] figure 20)
∞
( f m ) unip = m sin ω s t +
∑
h=1
h
hπ
4 ( –1 )
------------------ cos ------2
πh
∞
∑
p=0
hπm
J 2 p + 1 ------------- [ sin ( nh + 2 p + 1 ) ω s t – sin ( nh – 2 p – 1 ) ω s t ]
2
c – MLI triphasée bipolaire
Amplitude des raies
A
0
t
t
+1
t
(fm)triph
R
t
–1
n
m 3
π
( f m ) triph = ------------- sin ω s t + --- +
2
6
∞
∑
h=1
h
4 ( –1 )
-----------------πh
hπ
sin ------2
∞
∞
h π m cos 2 pω s t
J 2 p -------------
2 – cos 2 p ω t – 2π
-------
p=1
s
3
∑
hπ
h π m sin ( 2 p + 1 ) ω s t
+ cos ------- ∑ J 2 p + 1 -------------
2 – sin ( 2 p + 1 ) ω t – 2π
2
-------
p=0
s
3
cos nhω s t
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 3
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
■ Que le support soit analogique ou numérique, la philosophie
générale est donc sensiblement la même. La modulation en régime
permanent alternatif est obtenue par injection d'une consigne analogique alternative, dans le premier cas, d'un mot binaire, image
discrétisée de cette consigne analogique, dans le second cas. Dans
les deux cas, le signal produit a la forme de la fonction de modulation que l'on veut imposer à la cellule. Il devrait évidemment passer
par une interface pour commander les interrupteurs de puissance.
À ce principe général correspond un nombre quasi infini de
variantes, selon la nature du support matériel, la situation de
l'impulsion dans la période de découpage, la stratégie de l'éventuel
échantillonnage, la relation synchrone ou asynchrone entre la
porteuse et la modulante, etc.
ments de repères (Park, Clarke, Concordia, cf. [7] et [8]) et procèdent
d'une vision globale du système polyphasé. La commande d'un
onduleur polyphasé peut donc se concevoir dans ce cadre.
Nous allons donner quelques éléments sur cette approche, en
nous plaçant dans le cas particulier , mais très représentatif, du
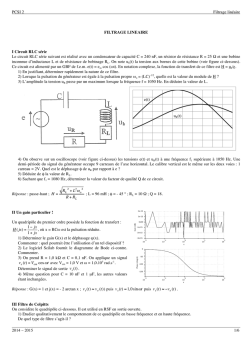
triphasé . Si l'on s'appuie sur le schéma de la figure 2 a, il apparaît
clairement que l'objectif final est de contrôler le système de tension
[vaN, vbN, vcN] aux bornes d'une charge triphasée quelconque (mais
équilibrée).
On peut alors se ramener au contrôle d'un vecteur diphasé, image
du système triphasé, à travers la transformation de Concordia
inverse :
Nous ne proposons donc ici que quelques exemples caractéristiques, directement inspirés des stratégies de commande évoquées
dans le paragraphe 2.4 du fascicule [D 3 176], dans le cas d'onduleurs
monophasés en pont (deux cellules) ou triphasés (trois cellules).
Les caractéristiques obtenues pour ces exemples (tableau 1)
résultent des hypothèses de travail suivantes :
— l’organe de modulation de chaque cellule fonctionne selon le
principe de la figure 1 a (impulsion centrée sur la période de découpage en régime statique) ;
— les organes de modulation des différentes cellules fonctionnent avec une porteuse commune ;
— la modulante est synchrone de la porteuse avec Ts = nTd et n
entier ;
— la fréquence de découpage est grande devant la fréquence
fondamentale ; pour des commodités de représentation, n est ici
égal à 20 ;
— pour chaque cellule k, la tension de modulation est de la
forme :
1
( v mod ) k = --- [ A + V mod sin ( ω s t + ϕ k ) ]
2
avec ωs pulsation de modulation (= 2 π Fs),
ϕk déphasage par rapport au fondamental,
soit un rapport cyclique de la forme :
1
R k = --- [ 1 + m sin ( ω s t + ϕ k ) ]
2
avec m = 2 Vmod/A,
ce qui correspond à une modulation sinusoïdale en régime permanent.
Les spectres représentés sont ceux des fonctions de modulation fm.
L'observation de ces résultats, en terme de contenu harmonique,
montre l'intérêt des modes bipolaires qui sont majoritairement
utilisés. Plus généralement, dans le cas où n est grand devant 1, elle
permet de confirmer la répartition caractéristique par groupes de
raies quasi indépendants (pas d'intermodulation), organisés autour
de multiples de la fréquence de découpage et l'existence d'une
composante fondamentale, image de l'onde modulante. Ces
tendances tout à fait générales permettent de définir une expression
générique par excès (au sens du contenu harmonique) de la fonction de modulation d'une cellule commandée en MLI :
[ v αβ ] =
∞
vβ
=
1
1 – --2
1
– --2
v aN
v bN
3
3
0 – ------- – ------- v cN
2
2
v aM + v bM + v cM
( f ma + f mb + f mc ) E
- = -----------------------------------------------v NM = ------------------------------------------3
3
v aN
2 – 1 – 1 f ma
E
v bN = --- – 1 2 – 1 f mb
3
– 1 – 1 2 f mc
v cN
Par principe, cet onduleur a un fonctionnement discret. Il ne peut
prendre que (2)3 = 8 états. À l'aide des relations précédentes, on
peut dresser la liste de ces états et des tensions qui leur sont associées (tableau 2).
vcN
E
c
b
a
N
vbN
vaN
M
a
structure
β
2
E
3
vαβ 3
vαβ 2
(010)
(110)
II
III
∞
∑ ∑
2
--3
Si l'on associe à chaque cellule une fonction de modulation
fm a,b,c, on peut parallèlement écrire les relations suivantes :
1
f m = --- [ 1 + m sin ( ω s t + ϕ k ) ]
2
+
vα
A hh ′ [ sin [ ( h + h ′ ) ω s t + ϕ 1 hh ′ ] + sin [ ( h – h ′ ) ω s t + ϕ 2 hh ′ ] ],
I
vαβ 4
vαβ 1
(011)
(100)
IV
h = 1 h′ = 0
expression que l'on pourra utiliser en supposant qu'il n'y a pas de
recouvrement entre les groupes de raies organisés autour des
rangs hωs.
α
VI
V
vαβ 5
vαβ 6
(001)
(101)
1.1.3 MLI instantanées vectorielles
L'apparition du concept de MLI vectorielle correspond au développement des techniques de commande des machines à courant
alternatif qui utilisent largement les transformations et change-
D 3 177 − 4
b
tensions de sortie dans le repère α, β
Figure 2 – Onduleur triphasé
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
Tableau 2 – États d’un onduleur triphasé
États des
fonctions de
modulation
Tension
neutre
Tensions simples
triphasées
Tensions
diphasées
fma
fmb
fmc
vNM
vaN
vbN
vcN
3 vα
-------------E 2
3 vβ
-------------E 2
0
1
1
0
0
0
1
1
0
0
1
1
1
0
0
1
0
0
0
0
1
1
1
1
0
E/3
2E/3
E/3
2E/3
E/3
2E/3
0
0
2E/3
E/3
–E/3
–2E/3
–E/3
E/3
0
0
–E/3
E/3
2E/3
E/3
–E/3
–2E/3
0
0
–E/3
–2E/3
–E/3
E/3
2E/3
E/3
0
0
1
1/2
–1/2
–1
–1/2
1/2
0
0
0
3⁄2
3⁄2
0
– 3⁄2
– 3⁄2
0
La commande en MLI vectorielle de l'onduleur consiste à le
piloter dans le repère α, β, dans lequel il peut générer 6 vecteurs non
nuls (tableau 2) dont la représentation est donnée sur la figure 2 b.
Si l'on utilise directement ces états, on se replace dans le cadre
limité de la commande pleine onde. Pour contrôler un vecteur [vαβ]
de phase et d'amplitude quelconques dans ce plan, il faut alors
ajouter un aspect temporel, c'est-à-dire la modulation de largeur
d'impulsion. On fabrique un vecteur moyen (relativement à la
période de découpage) qui résulte du moyennage temporel des
deux vecteurs les plus proches du diagramme (figure 3).
Nous avons choisi une configuration de modulation qui reproduit
les motifs centrés déjà présentés dans les modulations classiques.
Le système de commande correspondant, obligatoirement
programmé, contient un algorithme qui identifie le secteur dans
lequel se situe le vecteur [vαβ] désiré et calcule la modulation
adéquate pour le générer à partir des deux vecteurs délimitant ce
secteur.
Le principal intérêt de ce type de modulation est de s'insérer naturellement dans un organe de contrôle fonctionnant dans un repère
diphasé, comme c'est le cas dans la plupart des commandes
modernes de machines alternatives.
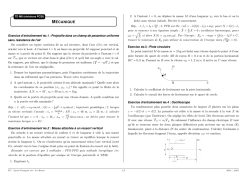
Il est tout à fait possible de généraliser cette représentation et les
stratégies de commande associées à des onduleurs multiniveaux ,
bien que cela devienne rapidement très complexe. Ainsi, dans un
onduleur à p phase et n cellules par phase (soit n + 1 niveaux par
phase), il existe (2n)p combinaisons de commande qui conduisent à
(n + 1)p états distincts sur les p phases. Différentes associations de
ces états correspondent elles-mêmes à des vecteurs identiques
[vαβ]. Nous donnons simplement l'exemple d'un onduleur triphasé
à trois niveaux (64 combinaisons, 27 états), qui délivre 19 vecteurs
distincts en incluant le vecteur nul (figure 4).
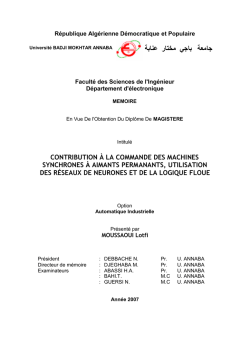
1.1.4 MLI calculées
La philosophie des MLI calculées est sensiblement différente.
Elles sont utilisées lorsque le rapport entre la fréquence de découpage et la fréquence fondamentale est faible, ce qui est fréquent en
forte puissance. Dans ce cas, il y a présence de composantes harmoniques de rang bas indésirables, que l'on cherche à éliminer ou à
minimiser en exploitant au mieux le nombre d'impulsions disponibles sur la période fondamentale. Pour atteindre cet objectif, on
détermine a priori des formes d'ondes optimisées qui sont ensuite
mémorisées dans des tables. La courbe inférieure du graphe de la
figure 5 montre un exemple simple de fonction de modulation, sur
laquelle on peut procéder à cette optimisation. Il s'agit ici d'une
forme à trois niveaux et six impulsions par période, mais le principe
peut être généralisé à un nombre quelconque d'impulsions, sachant
que celui-ci sera défini par le rapport entre la fréquence de commutation permise par la technologie des interrupteurs et la fréquence
fondamentale.
β
vαβ 2
α
(110)
vαβ
(R2 Td)vαβ 2
(R1 Td)vαβ 1
100
Figure 4 – Représentation vectorielle pour un onduleur triphasé
à trois niveaux
vαβ 1
(100)
fm1
110
1
fm1
Ψ
2Ψ
π
0
fm2
Td
R2 Td /2
fm2
1
fm3
0
R1 Td /2
Td /2
Figure 3 – Construction par modulation d’un vecteur vαβ
2π
θ
F
Ψ2
F
–1
2Ψ1
π
2π
θ
–1
Figure 5 – Exemple de paramètres d’une MLI calculée
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 5
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
La décomposition de la fonction de modulation de base (courbe
supérieure du graphe) est :
4
f m1 ( θ ) = --π
∞
∑
h =1
1
--- cos ( hψ ) sin ( hθ )
h
vs
E
K1
E
E /2
avec h impair.
K2
La décomposition du motif complet est alors :
4
f m2 ( θ ) = --π
∞
∑
h =1
4
— A 1 = --- ( cos ψ 1 + 2 cos ψ 2 cos φ )
π
4
— A 3 = ------- ( cos 3 ψ 1 + 2 cos 3 ψ 2 cos 3 φ )
3π
4
— A 5 = ------- ( cos 5ψ 1 + 2 cos 5ψ 2 cos 5φ ), etc.
5π
L'optimisation fait intervenir la résolution numérique de ce
système et peut s'appuyer sur différents critères comme l'annulation pure et simple des premiers rangs ou, plus globalement, sur la
minimisation du taux de distorsion.
Il faut souligner que l'on doit mémoriser autant de motifs que de
valeurs désirées de la composante fondamentale. D'autre part, dans
l'hypothèse d'une application à large plage de fréquence (variation
de vitesse), il faut créer différentes gammes de motifs selon la situation dans cette plage (nombre d'impulsions par période fondamentale croissant avec cette dernière, à fréquence de commutation
donnée). Cette mise en œuvre est donc assez lourde.
Enfin, le principe même de la stratégie empêche d'agir à l'échelle
de la période de découpage et l'on perd donc le caractère quasi
instantané présent dans les techniques précédentes.
1.2 Dynamique des tensions de sortie
d’un onduleur triphasé
1.2.1 Principe de l’obtention de composantes
fondamentales maximales
Parallèlement aux aspects évoqués dans le paragraphe 1.1
(composantes harmoniques, dynamique de commande), le concepteur doit également se préoccuper d'exploiter, au mieux, le potentiel
de l'étage de puissance de l'onduleur. À tension d'alimentation
donnée, on cherche naturellement à maximaliser les valeurs des
tensions de sortie alternatives en régime établi et leur éventuelle
dynamique d'excursion, en régime transitoire.
■ Si l'on observe le fonctionnement de la cellule élémentaire à
deux niveaux majoritairement utilisée (figure 6 a), on constate que
les composantes basse fréquence de la tension de sortie (hors composantes harmoniques de découpage) doivent obligatoirement
s'inscrire dans l'enveloppe (0, E), valeurs maximales que peut
atteindre la valeur moyenne sur la période de découpage de cette
tension de sortie.
Dans la configuration très classique de la génération d'ondes
sinusoïdales, la forme qui semble donc s'imposer naturellement et
qui correspond à une modulation purement sinusoïdale, est celle de
la figure 6 b. Elle conduit à obtenir une amplitude maximale de
l'onde sinusoïdale utile (hors composante continue) qui vaut :
V sM = E ⁄ 2
Dans le cas des onduleurs triphasés, on obtient alors des tensions
composées de valeur maximale :
UM =
D 3 177 − 6
0
1
--- [ cos ( hψ 1 ) + 2 cos ( hψ 2 ) cos ( hφ ) ] sin ( hθ )
h
À partir de là, il est possible de calculer l'amplitude de chaque
rang harmonique en fonction des différents paramètres angulaires :
3E ⁄ 2
vs
Ts /2
a
b
cellule
t
forme d'onde
Figure 6 – Dynamique de la cellule en régime sinusoïdal
■ Il s'avère que, dans un certain nombre de cas, il est indispensable
d'aller au-delà de cette limite. Citons l'exemple des variateurs de
vitesse industriels qui, alimentés par les réseaux à 400 V à travers
un pont de Graetz à diodes triphasé, doivent être capables de générer des tensions de sortie atteignant cette valeur efficace de 400 V,
de façon à pouvoir alimenter des machines à courant alternatif standards. Un calcul rapide montre que cela est impossible avec les
valeurs ci-dessus. En effet, on obtient des tensions dont la valeur
efficace maximale atteint théoriquement 82 % de la valeur efficace
des tensions homologues du réseau.
● Il faut donc trouver un moyen de passer outre cette limitation,
tout en préservant la forme sinusoïdale des tensions appliquées à la
charge. Cela est possible en partant du constat que ce sont les tensions composées délivrées par l'onduleur triphasé qui importent.
Observons la représentation de la figure 7 a sur laquelle apparaissent les trois tensions issues des trois cellules constitutives
(figure 2 a) et dont les excursions sont toujours limitées à l'intervalle [0,E].
Le principe utilisé consiste à imposer des fondamentaux d'amplitude supérieure à E/2, ce qui conduit à saturer à la valeur E les
tensions de chacune des cellules dans leur alternance positive (réciproquement, à saturer à 0 les tensions dans leur alternance négative). Si, pendant cette phase de saturation, la chute de tension
correspondante est compensée par une diminution rigoureusement
complémentaire (réciproquement, une augmentation) de la tension
des autres cellules, à condition qu'elles ne soient pas elles-mêmes
en état de saturation, les tensions composées qui nous intéressent
restent sinusoïdales. L'accroissement maximal que l'on peut
espérer est celui de la figure 7 b, qui correspond à des paliers de
saturation de 60°. La valeur maximale du fondamental des tensions
composées est alors égale à 2 ⁄ 3 = 1,15 fois celle obtenue en
modulation purement sinusoïdale.
Ce principe est relativement simple à mettre en place dans des
commandes MLI instantanées programmées. Si l'on suppose que
les modulateurs de chaque cellule sont pilotés par des grandeurs
modulantes sinusoïdales xmoda, xmodb, xmodc normalisées de la
forme :
xmoda = X sin ωst,
avec X < 1,15, il suffit de réaliser un algorithme imposant les conditions suivantes :
— si x mod a <1, x mod b, x mod c sont inchangées,
— si x mod a > 1,
(xmodb) modifiée = xmodb + sign (xmoda) – xmoda,
(xmodc) modifiée = xmodc + sign (xmoda) – xmoda,
avec sign (xmoda) = + 1 pour xmoda > 0,
sign (xmoda) = – 1 pour xmoda < 0.
Le même processus doit être appliqué au deux autres modulantes.
● De la même façon, le principe des MLI vectorielles permet
d'aboutir à ce résultat, ce qui constitue un autre de leurs avantages.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
vcM
vaM
β
vbM
fmb = 1
E
fmc = 0
vαβ 3
vαβ 2
ωs
E /2
D
t
C
B
fma = 0 vαβ 4
0
a
fma = 1
cas quelconque
vcM
vaM
α
vαβ 1
A
vbM
E
vαβ 5
π /3
fmc = 1
ωs
E /2
vαβ 6
fmb = 0
t
a
représentation vectorielle
A
0
b
B
C
D
fma 1
cas limite
0
Figure 7 – Modulation triphasée permettant l’accroissement
des fondamentaux
t
fmb 1
0
t
fmc 1
Il faut noter que le principe de ce mode de commande peut être
appliqué pour des tensions non sinusoïdales ou en régime transitoire, dans la limite des dynamiques respectives de chaque cellule.
En effet, si l'on observe à nouveau la représentation dans le plan
α, β (figure 8) on peut noter que tous les vecteurs que l'on peut
générer par modulation doivent s'inscrire dans l'hexagone défini
par les 6 vecteurs initiaux (figure 2 b). Dans une commande sinusoïdale, le vecteur [vαβ] doit alors décrire une trajectoire circulaire s'inscrivant elle-même dans cet hexagone. Les amplitudes maximales de
ce vecteur et des tensions simples triphasées sont donc :
V αβ M =
π
2
--- E cos --6- =
3
3
2
--- E --2
3
et
0
t
Td
b
modulation temporelle
Figure 8 – Modulation maximale dans une MLi vectorielle
1.2.2 Injection d’harmoniques
Le principe précédent peut être replacé dans le contexte statique,
et donc plus restrictif, des régimes sinusoïdaux établis. Si l'on
revient aux courbes de la figure 7, on remarque que les modifications imposées par le fonctionnement en saturation reviennent à
ajouter à chacune des tensions simples une même tension harmonique dont la composante fondamentale est à la pulsation 3ωs.
E
2
E
--- V αβ M = ------- = 1,15 --2
3
3
On retrouve une valeur de VM identique à la valeur majorée d'un
facteur 1,15 déjà obtenue précédemment. L'algorithme de la MLI
vectorielle permettant d'atteindre cette valeur maximale fait apparaître des phases de saturation identiques à celles qui apparaissent
sur la figure 7, et dont la situation dans le plan α, β est indiquée sur
la figure 8. Les modulations temporelles associées à quelques
points caractéristiques du diagramme apparaissent également sur
cette figure.
Une autre façon d'aborder le problème est donc d'injecter dans
les grandeurs modulantes une composante de cette nature. La
tension harmonique de la figure 7 b contient tous les rangs multiples de 3 (qui disparaissent naturellement lors de la composition
des tensions) et il est difficile de recréer a priori un tel signal. Une
pratique courante consiste à ajouter uniquement la composante
harmonique de rang 3 (figure 9), qui suffit à obtenir la majoration
caractéristique de 1,15.
Outre la majoration des termes fondamentaux, une autre conséquence positive de ces modes de commande est que, pendant les
phases de saturation, le découpage n'est pas nécessaire, ce qui
entraîne une importante économie de commutations (donc de
pertes).
On montre que, pour faire rentrer la tension simple résultant de
cette injection dans l'intervalle [0,E], la composante de rang 3 doit
être égale à 1/6 de la composante fondamentale (elle-même
majorée d'un facteur 1,15 par rapport à une modulation sinusoïdale).
La forme des modulations obtenues est à l'origine de la terminologie anglo-saxonne « flat-top », très couramment utilisée
dans la littérature.
Cette approche statique de la majoration des composantes fondamentales est plus spécifiquement adaptée aux MLI calculées dont
l'optimisation préalable peut aisément inclure la génération d'une
composante harmonique de rang 3.
VM =
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 7
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
1.3.2 Commande instantanées
h1
E
Elles sont basées soit sur l'emploi de modulateurs instantanés
(cf. paragraphes précédents) soit d'organes spécifiques, dans le cas
des commandes en « fourchette ».
h1 + h3
1.3.2.1 Commandes instantanées linéaires
E /2
t
h3
0
Figure 9 – Injection d’harmonique 3
1.3 Commandes en courant
Elles utilisent le principe des boucles d'asservissement linéaires.
La chaîne d'action est constituée de l'onduleur, de sa commande
MLI et fait également intervenir la source alternative, essentiellement à travers sa composante inductive (la f.é.m. constituant une
perturbation au sens des asservissements).
La boucle elle-même peut être réalisée de façon analogique ou
numérique. Deux exemples de principe sont indiqués sur la
figure 11 :
— l'un en monophasé avec une boucle analogique ;
— l'autre en triphasé avec des boucles numériques utilisant les
transformations de Park, Concordia (cf. [7][8][10]) ainsi qu'une MLI
vectorielle.
Ce dernier exemple correspond donc typiquement à une
commande vectorielle de machine à courants alternatifs.
1.3.1 Généralités
Nous avons passé rapidement en revue, au paragraphe 1.1, les
principales stratégies de commande rapprochée d'un onduleur de
tension, qui ont logiquement pour fonction de contrôler la forme
des tensions générées. Dans la très grande majorité des applications, cette commande rapprochée est incluse dans un processus
global faisant intervenir régulations et asservissements.
Dans les deux cas, l'utilisation de MLI instantanées permet
d'espérer un contrôle lui-même quasi instantané des courants dans
la mesure où la fréquence de découpage est grande devant celle des
composantes basse fréquence que l'on veut générer.
Un niveau d'intervention, quasiment incontournable, est le
contrôle des courants de sortie. Il répond généralement à une
double préoccupation :
— d’une part, la volonté de protéger les composants de
l'onduleur ;
— d'autre part, le respect des exigences du processus.
T1
T3
L
vs
E
T2
T4
On peut citer :
is
Exemple : les commandes de machines à courants alternatifs dont
le contrôle du couple passe par celui des courants, les alimentations de
secours pour lesquelles des boucles internes de courant permettent
d'augmenter sensiblement les performances des asservissements de
tension ou, encore, les filtres actifs qui sont, par principe, pilotés pour
absorber des courants harmoniques compensateurs.
D'une manière générale, les sources alternatives connectées aux
onduleurs sont décrites, de façon simplifiée, par un schéma équivalent par phase qui est celui de la figure 10. La source e et l'inductance L peuvent être respectivement la force électromotrice (f.é.m.)
et l'inductance de fuite d'une machine à courants alternatifs, la
tension aux bornes de la capacité d'un filtre de sortie et l'inductance
de ce même filtre ou, enfin, la tension d'un réseau alternatif et son
inductance de ligne. Dans certains cas, on peut être amené à introduire une inductance supplémentaire pour majorer l'effet de filtrage
du courant.
MLI et interfaces
id ref
id ref
+
+
–
monophasé analogique
Reg
Figure 10 – Schéma équivalent simplifié d’une source alternative
D 3 177 − 8
εd
εq
–
εα
Park
Reg
id
iq
b
e
+
is ref
a
Le principe des commandes en courant revient donc à imposer le
courant dans ces inductances en agissant sur les tensions de sortie
de l'onduleur. Selon les besoins ou la nature de la modulation, on
peut vouloir maîtriser les courants instantanés ou simplement leur
valeur crête ou efficace.
L
–
Reg
MLI
vectorielle
fma
fmb
εβ
fmc
iα
(Park)–1
iβ
ia
Concordia
triphasé numérique
ε
erreur de courant
Reg régulateur
L'indice « ref » indique qu'il s'agit d'une consigne de courant
Figure 11 – Boucles de courant instantanées : exemples
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
ib
ic
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
T1
T3
L
vs
E
■ Le schéma de la figure 12 montre le principe d'une telle commande (hystéséris H), dans le cas simple d'un onduleur monophasé et dans une logique bipolaire, sachant qu'il est parfaitement
extensible à des commandes unipolaires ou, plus généralement, à
des structures multiniveaux. La représentation correspond ici à un
fonctionnement statique sur quelques périodes de découpage,
sachant que la référence est en réalité une grandeur alternative
basse fréquence.
vL
T2
T4
■ Cette technique peut également être appliquée aux onduleurs
triphasés, avec quelques nuances. En nous appuyant à nouveau
sur le schéma de la figure 2 (paragraphe 1.1.3), rappelons les
valeurs que peuvent prendre les tensions de phase en fonction de la
commande (tableau 3).
is
Interfaces
T1, T4
fermés
H
En supposant toujours qu'une phase peut être représentée par un
modèle de type série La,b,c, ea,b,c (figure 10), examinons les conditions de contrôle du courant à partir de la relation :
–
+
T2, T3
fermés
H
is ref
d i a, b, c
v L a, b, c = L a ------------------ = v a, b, c N – e a, b, c
dt
is ref – is
is ref
Tableau 3 – États d’une tension simple pour l’état haut
de sa fonction de modulation
t
E
is
vs
t
–E
Figure 12 – Structure de principe d’une commande en fourchette
Dans la plupart des applications, une modélisation des onduleurs
par un schéma équivalent moyen suffit et permet de traiter les
boucles par des méthodes de réglage linéaires. Les bandes
passantes que l'on obtient classiquement sont de l'ordre du dixième
de la fréquence de découpage, à condition que l'inductance de
sortie ne concerne que les composantes harmoniques de découpage (pas d'influence en basse fréquence).
On peut se demander ce que deviennent les contenus spectraux des tensions (et donc indirectement des courants) dans ce
contexte. Dans le cas de charges linéaires et pour des régimes
sinusoïdaux établis, on retrouve, pour une structure donnée de
modulateur, les composantes harmoniques que l'on aurait
obtenues en boucle ouverte, pour une même valeur de la composante fondamentale de tension. Les données sur la modulation de largeur d'impulsion restent donc utilisables en régime
établi.
1.3.2.2 Fourchettes de courant
Cette technique de commande, relativement répandue, consiste à
imposer les commutations de l'onduleur pour maintenir le ou les
courants dans une fourchette imposée. C'est le principe de contrôle
en courant le plus direct que l'on puisse imaginer. La structure de
commande est alors spécifique (il n’y a plus de modulateur). On
utilise le fait que les tensions instantanées délivrées par un onduleur
vont générer, dans l'inductance de la maille alternative (on se place
toujours dans l'hypothèse de la figure 10) une ondulation de
courant triangulaire à l'échelle de la période de découpage. Cette
ondulation va alors être exploitée pour faire « autocommuter »
l'onduleur à l'aide d'une chaîne à hystérésis qui se substitue donc
au modulateur classique.
États des fonctions de modulation
Tension simple
triphasée
fma
fmb
fmc
vaN
1
1
1
1
0
1
0
1
0
0
1
1
2E/3
E/3
E/3
0
Les cases en grisé indiquent les valeurs de tension « non acceptables ».
La commande en fourchette suppose d'être capable d'imposer la
pente (positive ou négative) des courants par l'intermédiaire des
tensions de l'onduleur. La f.é.m. du récepteur peut éventuellement
s'opposer à cette action. Dans un fonctionnement classique, son
amplitude est inférieure ou égale à celle de l'onde de tension fondamentale délivrée par l'onduleur, donc de valeur maximale E/2, voire
1,15E/2 (cf. paragraphe 1.2).
Pour être certain de contrôler les pentes des courants de phase, il
faut donc être capable, en toute circonstance, d'appliquer des
tensions va,b,c N supérieures à E/2, en valeur absolue instantanée. Si
l'on observe le contenu du tableau 3, on note que la maîtrise d'un
courant de phase ne peut pas, en toute rigueur, dépendre uniquement de la tension de cellule correspondante, mais suppose de
prendre en compte l'état des autres cellules. En effet, pour une
tension quelconque (exemple de va) à l'état haut (fma = 1), selon
l'état des autres cellules, la tension de phase homologue (vaN) peut
prendre les valeurs E/3, voire 0, qui sont insuffisantes pour obtenir
inconditionnellement le fonctionnement souhaité. Comme il était
prévisible, une approche globale paraît préférable (on retrouve ici la
tendance de la MLI vectorielle).
Une stratégie possible consiste alors à contrôler le courant d'une
phase donnée, en imposant globalement l'état des trois cellules, de
façon à appliquer uniquement les niveaux ± 2E/3 à cette phase. Par
exemple, la croissance du courant ia doit être imposée par la combinaison 100, sa décroissance par la combinaison 011.
Le principe d'un organe de commande fonctionnant selon cette
stratégie est donné sur la figure 13. À chaque cellule correspond
une chaîne à hystérésis. La détection de l'erreur de courant la plus
élevée Sup ε permet d'imposer, via l'état de l'hystérésis correspondante, la combinaison de commande triphasée permettant l'évolution désirée du courant de phase associé.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 9
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
b
a
ia ref
1
H
+
SHa
–
ET
0
ia
SHb
εa
εb
εc
Sup [εa, εb, εc] S
Hc
=
εa, εb, εc
ET
OU
fma
fmb
fmc
ET
1 0 0
0 1 0
0 0 1
SHa, SHb, SHc signaux de sortie des fonctions hystérésis
Figure 13 – Exemple d’organe de commande
d’une fourchette triphasée
Il faut néanmoins préciser que la commande d'un onduleur
triphasé par trois fourchettes distinctes pilotant chacune des trois
cellules est envisageable (et utilisée). Dans certaines configurations,
les courants sortent transitoirement de l'enveloppe espérée, mais le
fonctionnement global reste satisfaisant.
■ Une des particularités des commandes en fourchette est
d'induire un fonctionnement à fréquence libre qui peut faire apparaître des problèmes de filtrage ou de nuisance sonore.
Dans le contexte de ces commandes en courant instantanées,
on peut donc considérer qu'un onduleur de tension, associé à
l'inductance de la maille alternative (qu'elle soit ajoutée ou
qu'elle fasse partie intégrante de la source alternative) et muni
d'une boucle de courant correctement réglé, devient une source
de courant contrôlée, pour laquelle la f.é.m. du récepteur constitue une perturbation.
L'inductance a évidemment une influence directe sur les
caractéristiques dynamiques de cette source. La configuration
idéale, en terme de bande passante, est celle où l'inductance
n'intervient qu'à l'échelle du découpage.
1.3.3 Commandes en valeur crête ou efficace
On peut également réaliser le contrôle d'un courant crête ou d’un
courant efficace. La structure est semblable à celle de la figure 11 a,
avec quelques modifications notables.
La première correspond à la mesure d'une grandeur crête ou efficace qui suppose une transformation de la grandeur instantanée
(détecteur crête ou redressement/moyennage) ; cela conduit fatalement à introduire une constante de temps nettement inférieure à la
période basse fréquence.
La seconde est que l'erreur de la nouvelle boucle ainsi créée ne
peut plus agir sur la valeur instantanée de la tension et ne peut donc
plus être appliquée directement au modulateur. Elle doit intervenir
sur le contrôle de l'amplitude d'une modulante que l'on injecte
parallèlement sur le modulateur.
Ce type de commande est typiquement adapté aux MLI calculées
(§ 1.1.4), qui interdisent un contrôle instantané.
D 3 177 − 10
D'une façon générale, les commandes triphasées en courant
sur charge à point neutre flottant peuvent induire des fonctionnements particuliers. En effet si, pour une raison quelconque,
une composante de courant homopolaire est générée par le
contrôle des courants, elle induit fatalement l'apparition d'une
composante homopolaire de tension qui entraîne elle-même un
déplacement du point de fonctionnement des différentes cellules (saturation) et une modification de la forme des tensions
modulées. On peut alors être amené à utiliser la commande
d'une cellule pour contrôler cette tension homopolaire, les deux
autres assurant la maîtrise de deux courants de lignes, suffisante dans une configuration à neutre flottant.
2. Filtrage passif
Nous avons vu au paragraphe 1 que l'utilisation des techniques
MLI correspond une notion de filtrage actif, dans la mesure où elles
permettent de contrôler une onde basse fréquence en générant des
composantes harmoniques parasites qui peuvent se situer relativement loin dans les fréquences hautes. Ces composantes n'en existent pas moins et la mise en place de filtres passifs est inévitable.
■ En ce qui concerne l'entrée , l'élément principal qui impose la présence de filtres est la génération de courants harmoniques par
l'onduleur, dont les sources continues, que ce soit des batteries ou
des redresseurs, s'accommodent très mal. Quelle que soit l'application, ces filtres d'entrée sont toujours présents.
■ Pour la sortie, la présence des filtres dépend des applications.
Ainsi, dans les entraînements à vitesse variable, les tensions découpées sont directement appliquées aux machines électriques, les
courants étant filtrés naturellement par leurs inductances de fuites.
À l'inverse, un onduleur d'alimentation sans interruption doit être
muni d'un filtre afin d'obtenir une tension de sortie quasi exempte
de composantes harmoniques de découpage.
■ Il est intéressant de s'appuyer sur ce dernier exemple caractéristique pour introduire les grandes lignes des exigences du filtrage
(figure 14).
Dans cet exemple d'un onduleur monophasé à sortie filtrée, le
filtre de sortie Ls,Cs a donc pour vocation première d'éliminer
l'essentiel des composantes harmoniques de découpage (passage
de v0 à vs sur la figure 14). Nous verrons au paragraphe 2.2 que son
introduction n'est pas sans conséquence sur le fonctionnement et le
dimensionnement de l'onduleur.
Au niveau de l'entrée , nous avons représenté un double étage qui
suggère que le filtrage d'entrée peut avoir à travailler aussi bien à la
fréquence de découpage (passage de i0 à i ’E sur la figure 14) qu'à
proximité de la fréquence fondamentale (passage de i ’E à iE). C'est
typiquement le cas dans les onduleurs monophasés de par l'existence d'une puissance fluctuante.
Dans la suite du paragraphe, nous allons apporter quelques précisions sur ces différents aspects du filtrage.
2.1 Filtrage d’entrée
Pour évaluer plus précisément les contraintes de filtrage d'entrée,
il est nécessaire de connaître le contenu harmonique du courant
absorbé par l'onduleur.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
Fd
Ls
E
Cs
v0
iE
i'E
i0
t
2Fs
vs
v0
t
t
Ts/2
Ts/2
F
Fs
2Fs
Fd
vs
t
t
Ts/2
2Fd F
Fs
Fd
2Fd F
Ts
Fs
F
Figure 14 – Exemple de contraintes de filtrage dans un onduleur
2.1.1 En monophasé
fm
Pour donner une idée de ce contenu harmonique, nous utilisons
l'expression générique de la fonction de modulation d'un onduleur
commandé en MLI sinusoïdale, énoncée dans le paragraphe 1.1.2.
Pour un onduleur monophasé à 2 cellules, elle est de la forme :
∞
∞
∑ ∑
f m = m sin ω s t +
A hh ′
h = 1 h′ = 0
sin [ ( h + h ′ ) ω s t + ϕ 1 hh ′ ]
+ sin [ ( h – h ′ ) ω s t + ϕ 2 hh ′ ]
Fs
F
– Fs
+ Fs
is fm
F
avec m < 1 et le respect de la condition Fd >> Fs.
D'autre part, si l'on suppose une charge linéaire et suffisamment
« filtrante » (inductance série), on peut considérer le courant de
sortie de l'onduleur également parfaitement sinusoïdal, de pulsation ωs :
is = IsM sin(ωst – ϕ)
hFd
F
Figure 15 – Contenu spectral haute fréquence du courant d’entrée
■ Le courant d’entrée de l’onduleur s’exprime alors selon :
i 0 = f m ( t) i s
soit :
Le second terme est une modulation d'amplitude par le courant is
des composantes haute fréquence de la fonction de modulation :
∞
i 0 = m I sM sin ( ω s t – ϕ ) sin ω s t
∞
+ I sM sin ( ω s t – ϕ )
( i 0 ) HF =
∞
∑ ∑
h = 1 h′ = 0
A hh ′
sin [ ( h + h ′ ) ω s t + ϕ 1 hh ′ ]
+ sin [ ( h – h ′ ) ω s t + ϕ 2 hh ′ ]
■ Le premier terme que l’on note (i0)BF traduit les échanges de puissance à basse fréquence entre la source et l’onduleur. Il peut
s’écrire :
IM
( i 0 ) BF = m ------ [ cos ϕ – cos ( 2 ω s t – ϕ ) ]
2
On y retrouve logiquement une valeur moyenne correspondant à
la puissance transmise et une composante en 2ωs, image de la puissance fluctuante présente sur la charge et que ne modifie pas
l'onduleur.
∞
∑ ∑
h = 1 h′ = 0
I s M A hh ′
sin [ ( h + h ′ ± 1 ) ω s t + ϕ 1 hh ′ 7 ϕ ]
--------------------2
+ sin [ ( h – h ′ ± 1 ) ω s t + ϕ 2 hh ′ 7 ϕ ]
■ La transformation subie par chaque groupe de raie est indiquée
sur la figure 15. Les amplitudes représentées sont quelconques,
sachant que des raies de même rang vont se composer avec des
phases différentes. Néanmoins, on peut affirmer que, qualitativement, le spectre haute fréquence du courant i0 est très similaire
à celui de la fonction de modulation (groupes de raies organisés
autour de multiples de la fréquence de découpage).
Sur l'entrée, le filtrage peut donc avoir à intervenir sur deux bandes
fréquentielles distinctes, l'une liée à la porteuse, l'autre à la modulante. Dans cette hypothèse, une option possible consiste à juxtaposer deux étages technologiquement différents puisque travaillant
dans des gammes fréquentielles différentes (cf. figure 14). Dans la
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 11
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
réalité, cette option est rarement utilisée pour des raisons économiques et les concepteurs préfèrent ne mettre en œuvre qu'un seul
étage intervenant dans les deux gammes, en utilisant des composants qui fonctionnent très souvent au-delà de leurs spécifications.
Dans l'application prise en exemple, la fréquence de découpage
est fixe. Il est donc concevable de filtrer le terme en 2ωs, bien que
cela soit très pénalisant à 50 Hz. Les applications à fréquence
variable à des fréquences plus faibles sont, par contre, difficilement
envisageables.
2.1.2 En triphasé
Dans une configuration triphasée, l’expression du courant
d’entrée devient :
i0 = iafma + ibfmb + icfmc
Si l'on considère un régime équilibré, tant sur le plan de la modulation que de la charge, les courants de sortie vont être de la forme
(en négligeant l'ondulation HF) :
2π k
i a, b, c = I sM sin ω s t – ---------- – ϕ ,
3
tandis que la forme générique des fonctions de modulation est :
∞
h = 1 h′ = 0
A hh ′
2π k
+ sin ( h – h ′ ) ω s t – ---------- + ϕ 2 hh ′
3
avec k = 0, 1, 2.
On obtient alors l’expression analytique approchée :
2
i0 =
- – ϕ
∑ --2- IsM sin ωs t – --------
3
2π k
1
k=0
2
+
∑
k=0
2.2 Filtrage de sortie
∞
∑
2π k
1 + m sin ω s t – ----------
3
2π k
∞ ∞
sin ( h + h ′ ) ω s t – ---------- + ϕ 1 hh ′
3
∑ ∑ A hh ′
2π
k
h = 1 h′ = 0
- + ϕ 2 hh ′
+ sin ( h – h ′ ) ω s t – --------
3
2
Xh
2
h=2
D = ---------------------------------X1
Dans notre cas, nous continuons de nous appuyer sur l'hypothèse
d'une commande MLI avec modulation sinusoïdale et la tension de
sortie de l'onduleur peut s'exprimer par :
2π k
I sM sin ω s t – ---------- – ϕ
3
Dans cette configuration, on retrouve à nouveau deux termes.
Le premier terme traduit toujours les échanges de puissance avec
la source continue :
3 m I sM
( i 0 ) BF = ------------------- cos ϕ
2
On remarque maintenant l'absence de puissance fluctuante,
propriété intéressante habituelle des systèmes triphasés équilibrés.
Cela était prévisible, compte tenu de la transparence de l'onduleur
quant à la puissance instantanée.
Le second terme contient les composantes harmoniques dues au
découpage et dont la répartition, si elle plus complexe qu'en monophasé, est toujours qualitativement similaire à celle caractérisant les
fonctions de modulation.
Le problème du filtrage de composantes basse fréquence ne se
pose donc pas dans le cas de régimes triphasés équilibrés, même si
la fréquence de sortie tend vers des valeurs très faibles, comme
c'est le cas dans les alimentations de machines à courants alternatifs (quelques hertz). En revanche, tout déséquilibre induira la réapparition d'un terme fluctuant et donc d'une composante basse
fréquence du courant d'entrée.
D 3 177 − 12
Sur un plan dynamique, les filtres d'entrée jouent évidemment un
rôle puisqu'ils stockent de l'énergie. Leurs mises sous tension ou
leurs passages d'un fonctionnement en charge à un fonctionnement
à vide ne doivent évidemment pas provoquer de dysfonctionnement de l'onduleur (surtensions). Ils peuvent également être à
l'origine d'instabilités avec certains types de contrôle des onduleurs
(fonctionnement à puissance constante).
Le rôle du filtre de sortie est de réduire le contenu harmonique
haute fréquence dû au découpage. Il s'agit là du premier critère de
dimensionnement. L'évaluation du taux de distorsion harmonique
est donc un moyen logique d'initier le calcul. Rappelons que, de
façon générale, le taux de distorsion harmonique d'un signal périodique X, que nous notons D, est le rapport entre la valeur efficace
des harmoniques hors fondamental et ce fondamental :
2π k
sin ( h + h ′ ) ω s t – ---------- + ϕ 1 hh ′
3
∞
∑ ∑
D'autres éléments doivent éventuellement être pris en considération dans la définition de ce filtre d'entrée. Ainsi, si la source
d'alimentation est un redresseur, configuration très répandue, il faut
se préoccuper du mode de fonctionnement, continu ou discontinu,
qu'induit le choix des composants du filtre.
Le filtrage de sortie est principalement utilisé dans les générateurs devant se substituer aux réseaux industriels. Nous avons déjà
évoqué, au début de ce paragraphe, le fait que, dans le cas des
entraînements à vitesse variable, les courants sont filtrés par les
inductances de la machine.
1
2π k
f ma, b, c = --- 1 + m sin ω s t – ----------
2
3
+
2.1.3 Interactions avec l’environnement
de l’onduleur
v 0 = f m E = E m sin ω s t
∞
+
∞
∑ ∑
h = 1 h′ = 0
A hh ′
sin [ ( h + h ′ ) ω s t + ϕ 1 hh ′ ]
+ sin [ ( h – h ′ ) ω s t + ϕ 2 hh ′ ]
Cette tension va être filtrée par un filtre du second ordre de
fréquence propre F0 (pulsation ω 0). Si l'on suppose que F0 est très
inférieure à la fréquence de découpage Fd, mais supérieure à Fs (pas
d'atténuation du fondamental), une raie quelconque de pulsation ω
2
sera soumise à une atténuation de ω 0 ⁄ ω 2.
Le taux de distorsion de la tension v0 filtrée a donc la forme
approchée suivante :
∞
∞
4
4
ω0
ω0
2
------------------------------------+ ------------------------------------ A hh ′
4
4
(
hω
+
h
′
ω
)
(
hω
–
h
′
ω
)
h = 1 h′ = 0
d
s
d
s
D = ------------------------------------------------------------------------------------------------------------------------------m
∑ ∑
∞
=
2
F
-----02Fd
∞
2
1
1
----------------------------------4- + ----------------------------------4- A hh ′
[
h
+
(
h
′
⁄
n
)
]
[
h
–
(
h
′
⁄
n
)
]
h = 1 h′ = 0
--------------------------------------------------------------------------------------------------------------------------m
∑ ∑
Il est donc parfaitement possible de calculer ce taux de distorsion
à partir de la décomposition en série de Fourier de la fonction de
modulation utilisée.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
v0
Ls
Ls
iLs
v0
t
Cs
vs
G (p )v0
Cs
vs
G (p ) fonction de transfert
Courant dans
un interrupteur
t
Figure 17 – Schéma équivalent de la sortie
Figure 16 – Influence du filtre sur l’onduleur
Exemple : l'utilisation d'une MLI bipolaire avec n = 20 et m = 1 (cf.
expressions du paragraphe 1.1.2), avec un filtre dont la fréquence de
cassure vaut
3. Réalisation, commande
et protection d’un bras
d’onduleur
F0 = Fd/5 = 4Fs,
conduit à un taux de distorsion théorique d'environ 3 %.
Le choix de F0 peut donc être guidé par les contraintes sur le taux
de distorsion sur charge linéaire. Cette première phase nous donne
donc le couple Ls, Cs.
La détermination complète des éléments du filtre doit alors
passer par d'autres considérations. Comme nous l'avons déjà
indiqué, ces dernières vont porter sur les impédances présentées
par le filtre à l'onduleur et à la charge. En régime statique (modulante nulle), on sait que le courant dans l'inductance du filtre
présente une composante alternative quasi triangulaire (figure 16).
Dans le cas d'un onduleur monophasé en pont à commande bipolaire, l'amplitude crête à crête de cette ondulation est maximale
pour le rapport cyclique 0,5 et vaut :
E
∆i LsM = ---------------2 Ls Fd
On retrouve cette ondulation modulée dans la configuration alternative. Elle se répercute directement sur les courants commutés par
les interrupteurs de l'onduleur et induit donc un surdimensionnement de ces derniers qui doit être limité et qui décroît avec Ls. C’est
une première tendance.
Parallèlement, le filtre va présenter une impédance de sortie Zs
dont l'expression peut être déterminée à partir d'un schéma équivalent de Thévenin (figure 17) :
Ls p
Z s ( p ) = ---------------------------- =
2
1 + Ls Cs p
( p ⁄ ω0 )
L
-----s- ------------------------------Cs 1 + ( p2 ⁄ ω2 )
0
Rappelons que sa fréquence de coupure se situe naturellement
entre Fs et Fd. Parcourue par d'éventuelles composantes harmoniques du courant de charge (charges non linéaires fréquentes sur les
onduleurs), Zs provoque l'apparition de composantes harmoniques
de tension qui dégradent le taux de distorsion. Il faut donc éviter
que ces harmoniques de courant ne tombent dans la zone d'amplification maximale (en particulier à la résonance) et, plus globalement,
il faut minimiser l'impédance caractéristique du filtre, ce qui induit
une tendance à inductance faible et condensateur de capacité
élevée.
On note que cette tendance est inverse de celle du surdimensionnement des interrupteurs. Le choix du couple résulte donc d'un
compromis entre la minimisation des contraintes sur les interrupteurs et la minimisation de l'impédance de sortie, qui doit évidemment être apprécié au cas par cas.
Comme nous l'avons vu dans le fascicule [D 3 176], le maillon-clé
de la structure d'un onduleur est la cellule de base constituée essentiellement de deux interrupteurs à trois segments, communément
appelée « bras de pont ». La conception d'une telle cellule, préliminaire incontournable à la mise en œuvre d'un onduleur, nécessite la
prise en compte de différents aspects sensibles dont les principaux
sont :
— le choix des composants de puissances à semi-conducteurs ;
— la commande rapprochée et la protection de ces mêmes
composants ;
— les interconnexions des éléments de cette cellule.
3.1 Composants de puissance
Les éléments centraux de la cellule sont évidemment les interrupteurs réalisés à partir de composants à semi-conducteurs. Compte
tenu de la nature des composants existants, chacun des interrupteurs est réalisé par l'association d'un composant entièrement
commandé et d'une diode antiparallèle. Dans l'état actuel de la technologie, les principaux composants utilisés dans les onduleurs sont
les transistors MOSFET (Metal Oxyde Semi-conductor Field Effect
Transistor), les transistors IGBT (Insulated Gate Bipolar Transistor),
les thyristors GTO (Gate Turn Off), par ordre croissant de puissance
commutable. Les transistors bipolaires, longtemps présents dans
ces structures, souvent dans des assemblages de type Darlington,
ont été totalement supplantés par les IGBT qui sont maintenant
largement majoritaires dans les différentes applications des onduleurs.
3.1.1 Spécificités et gammes d’emploi
des composants à semi-conducteurs
Notre objectif n'est pas ici de décrire précisément l'architecture et
le comportement physique intime de ces composants (le lecteur
pourra se référer aux fascicules sur les composants à semiconducteurs [5][6]), mais de donner quelques informations sur leurs
domaines d'emploi respectifs. Les principales caractéristiques
permettant d'affecter tel ou tel composant à tel domaine sont les
grandeurs électriques qu'il est susceptible de contrôler (tension à
l'état bloqué, courant à l'état passant), la chute de tension à l'état
conducteur (pertes par conduction) et les performances en commutation (durées d'ouverture et de fermeture) qui déterminent assez
directement le choix des fréquences de découpage.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 13
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
D'une façon générale, les performances dynamiques des composants évoluent en raison inverse de leur puissance commutable.
Cela induit une tendance très classique qui est la diminution des
fréquences de découpage avec l'accroissement des puissances
converties.
■ Transistor MOSFET
Le transistor MOSFET est un composant plutôt adapté aux applications de faible ou moyenne puissance (P inférieure à quelques
dizaines de kilowatts). En effet, c'est un dispositif à effet de champ
dont la résistance apparente en conduction croît fortement avec la
tenue en tension directe. Il en résulte que, pour obtenir des composants industriellement viables, la tenue en tension ne dépasse pas
1 000 V (avec quelques ampères de courant commutable) et les
courants admissibles sont de l'ordre de quelques centaines
d'ampères (pour des tenues en tension de 50 à 200 V). Parallèlement, l'absence de mécanisme bipolaire en fait un composant
intrinsèquement très rapide en commutation, pour peu que sa
commande de grille soit performante (cf. 3.1.2). Cette dernière est,
en statique, une commande en tension (impédance d'entrée très
élevée), ce qui est très intéressant sur le plan de la mise en œuvre.
Il est souvent utilisé dans des applications à basse tension
d'alimentation , avec des fréquences de découpage qui peuvent
éventuellement dépasser 100 kHz.
■ Transistor IGBT
Le transistor IGBT est né d'une sorte de mariage entre le transistor MOSFET et le transistor bipolaire afin de cumuler la simplicité
de commande du premier avec les performances en puissance
commutable du second. Les considérables efforts de développement consentis sur sa technologie depuis le début des années 1990
ont abouti à l'apparition de gammes très variées qui s'étendent
maintenant dans le domaine des tenues en tension de plusieurs
milliers de volts et des milliers d'ampères commutés. Ses performances en commutation sont tout à fait honorables et permettent
de l'utiliser à des fréquences de découpage comprises entre quelques kilohertz et quelques dizaines de kilohertz.
Compte tenu de ses caractéristiques, il est devenu le composant
incontournable des onduleurs (et d'autres familles de convertisseurs) dans une gamme de puissance qui s'étend maintenant de
quelques kilowatts à quelques mégawatts . Sa commande en
tension et son encapsulation, sous forme de modules (incluant des
bras, voire des structures triphasées), particulièrement adaptées
aux câblages de puissance, ont sûrement largement contribué à son
succès.
■ Thyristor GTO
Le thyristor GTO est le composant typique des convertisseurs de
très forte puissance . Sa tenue en tension peut atteindre 10 kV pour
des courants commutés de plusieurs milliers d'ampères. Conformément à la tendance évoquée au début de ce paragraphe, il s'agit
corollairement d'un composant lent dont les temps de commutations peuvent atteindre plusieurs dizaines de microsecondes. Intrinsèquement, il s'agit d'un thyristor et il présente les mêmes limites
dynamiques en terme de di/dt à la mise en conduction et de dv/dt
lors de la réapplication de tension directe. Ces deux grandeurs
doivent donc être limitées par des circuits auxiliaires.
Un aspect essentiel de la mise en œuvre de ces composants
est la réalisation des commandes dites « rapprochées », interfaces qui vont permettre de transformer les informations à bas
niveau, issues de la commande générale, en signaux capables
d'imposer, dans les meilleures conditions, les changements
d'états de ces composants et d'optimiser leur chute de tension
en conduction.
Ces commandes doivent être évidemment parfaitement
adaptées aux spécificités des composants considérés et les performances de ces derniers sont très largement dépendantes de
celles de leurs commandes.
D 3 177 − 14
iT
i
T
iL
iT
vT
L
E
iL
t
v
E
D
E'
vT
Td
t
Figure 18 – Formes typiques des ondes de courant
et de tension dans un hacheur
3.1.2 Synthèse des commandes rapprochées
Pour cet aspect, le lecteur peut à nouveau se référer aux fascicules
traitant de la commande des composants de puissance à semiconducteurs [9]. Nous donnons ici quelques éléments généraux
nécessaires à la présentation de la problématique générale relative
à la mise en œuvre d'un bras d'onduleur.
La commande d'un composant de puissance est indissociable de
ses conditions de fonctionnement dans le circuit de puissance. Le
circuit le plus simple, qui permet de mettre en évidence des conditions typiques, est le hacheur (figure 18) fonctionnant sur charge
inductive. Cette cellule élémentaire (un interrupteur T, une diode D),
avec ses deux variantes, selon que la charge est connectée au pôle
positif ou négatif de l'alimentation, et avec ses deux mécanismes de
commutation d'amorçage et de blocage, inclut qualitativement la
plupart des problèmes des montages onduleurs. Seules les
contraintes dynamiques sur les composants sont quantitativement
différentes de celles des onduleurs.
À ces formes caractéristiques de courant et de tension commutés
doivent correspondre des formes tout aussi caractéristiques des
grandeurs de commande des différents composants que nous
allons rapidement évoquer.
Il est délicat de comparer des composants dont les gammes de
puissance ou de fréquence diffèrent de plusieurs décades. On peut
néanmoins tourner en partie cette difficulté en travaillant avec des
ordres de grandeur sous forme réduite (figure 19).
■ Cas du transistor MOSFET
Ce composant jouit de la double réputation de composant rapide
et facile à commander. Il serait plus exact de dire rapide ou facile à
commander. Ne mettant pas en jeu de mécanismes bipolaires, il
n'est pas le siège de charges stockées. En raison de sa grille isolée,
on parle souvent d'un composant dont le courant de commande est
nul. Cependant, les valeurs importantes de sa capacité Cgs entre
grille et source, mais aussi, et surtout, de sa capacité grille-drain à
faible tension (pour les états proches de la conduction), peuvent
conduire à l'apparition de courants capacitifs de grille importants
lors des commutations. Deux possibilités peuvent alors se
présenter :
— si la commande n’est pas prévue pour fournir des courants de
commande importants, les commutations sont ralenties et le composant est (relativement) lent ;
— si la commande, plus sophistiquée, est conçue pour fournir
des courants intenses (parfois 20 ou 30 % du courant de drain !), le
transistor MOSFET est alors très rapide (figure 19 a).
■ Cas de l’IGBT
Bien que sa structure interne le rapproche un peu du transistor
bipolaire, voire du GTO, l'IGBT se caractérise par une commande à
grille isolée similaire à celle du transistor MOSFET. Pour ce qui
concerne sa commande rapprochée, on peut donc se ramener à ce
qui a été dit précédemment, mais en remarquant cependant que son
comportement bipolaire le rend naturellement plus lent que le
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
a
MOSFET
b
IGBT
c
Durant la conduction , le seul rôle de la commande est d'éviter le
blocage inopiné du dispositif lorsque le courant d'anode devient
très faible. Un courant minimal de commande est ainsi recommandé.
GTO
Lors du blocage, le rôle et les contraintes de la commande deviennent essentiels.
30 %
20 %
Courant principal
dans le composant
10 %
0%
– 10 %
– 20 %
– 30 %
Courant de commande
Courant principal
Figure 19 – Courants de commande des semi-conducteurs
Alimentation
Amplificateur
de courant
V+
0V
Composants
de puissance
V–
La commande doit, en effet, successivement :
— détourner le courant d’auto-entretien interne dû à la quatrième
couche ;
— extraire les charges de la jonction gâchette-cathode ;
— assurer l’extraction des charges de la jonction intermédiaire ;
— supporter le courant capacitif résultant de l’apparition de la
tension anode-cathode ;
— enfin, et surtout, permettre au « courant de queue », résultant
de la lente recombinaison des charges stockées au niveau de la base
épaisse, de s’écouler.
Des courants d'extraction de 20 à 30 % du courant d'anode, et des
traînages d'une dizaine de microsecondes doivent pouvoir être pris
en charge (figure 19 c) et représentent une puissance de
commande non négligeable (surtout en haute fréquence). Les architectures de commande sont, dans le principe, assez similaires à
celle de la figure 20, à ceci près que les étages d'amplification
doivent être capables de fournir des courants atteignant aisément
plusieurs centaines d'ampères.
Nous avons traité ici le cas simple du hacheur dévolteur dont
nous avons souligné (§ 3.1.2) qu'il était très représentatif. Pour
un onduleur à modulation de largeur d'impulsion , les formes
d'onde sont sensiblement analogues, à une différence très notable près qui est la valeur beaucoup plus élevée des variations
dv/dt que l'on peut y trouver. En effet, à l'état bloqué, un composant doit supporter le dv/dt généré par la mise en conduction de
son vis-à-vis (des valeurs de plusieurs dizaines de kV/µs peuvent être atteintes, en particulier avec des IGBT). Il est alors
nécessaire de franchir un pas supplémentaire dans la démarche
et de se préoccuper des interactions possibles entre les composants de puissance, leur commande rapprochée et la commande éloignée, ces différents maillons étant évidemment tous
interconnectés.
Optocoupleur
Figure 20 – Exemple de commande de composants à grille isolée
MOSFET, plus particulièrement à l'ouverture. Ainsi, sa commande
n'a pas à exploiter totalement la rapidité de l'étage MOSFET
d'entrée et peut être moins performante (figure 19 b).
Exemple : une commande de composant à grille isolée (MOSFET
ou IGBT) est donnée sur la figure 20. Une telle commande comprend
généralement :
— un ou plusieurs composants d'isolement galvanique assurant la
transmission du signal et de l'énergie nécessaire à la commande
(alimentations) ;
— un ou plusieurs étages d'amplification permettant de contrôler la
tension entre grille et source avec une capacité en courant instantané
suffisante.
■ Cas du GTO
Composant typiquement bipolaire, le GTO impose une
commande très spécifique. Contrairement aux dispositifs précédents, et en raison de la réaction très énergique due aux quatre
couches (des matériaux semi-conducteurs), il est impossible de
contrôler par la commande l'état des jonctions internes du GTO.
Durant la conduction, les trois jonctions qui le constituent sont polarisées en direct, stockant d'autant plus de charges qu'il s'agit de
jonctions haute tension.
Lors de la mise en conduction , la commande doit seulement
amener les charges nécessaires à la mise en conduction de la jonction gâchette-cathode, la réaction interne faisant le reste.
3.2 Transmission dynamiquement isolée
des signaux et de la puissance
de commande
3.2.1 Généralités
Dans la cellule de base de l'onduleur de tension, le potentiel de
référence de l'interrupteur commandé supérieur est flottant (il
évolue entre la tension d'alimentation et 0, au rythme du découpage).
S'il est imaginable de réaliser une connexion directe (méthode
employée en moyenne tension pour des convertisseurs économiques par décalage de potentiel), la configuration la plus répandue
pour transmettre les ordres aux commandes rapprochées inclut des
éléments d'isolement galvanique (cf. paragraphe 3.2.2).
Un schéma général typique de l'organisation d'un bras d'onduleur est donné sur la figure 21.
Il s'agit de transmettre des ordres de commande, mais aussi une
certaine puissance aux amplificateurs des commandes rapprochées, à fréquence et/ou rapport cyclique variable, à travers les
étages d'isolement galvanique. Le problème est loin d'être trivial
lorsque l'on précise que cet isolement galvanique ne doit pas être
seulement valable en régime continu ou en basse fréquence, mais à
l'échelle des temps de commutation des semi-conducteurs.
Comme nous l'avons évoqué dans le paragraphe 3.1.2, certains
onduleurs peuvent engendrer des dv/dt de plusieurs kV/µs, voire
plusieurs dizaines de kV/µs. Pour fixer des ordres de grandeurs, une
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 15
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
Isolement
galvanique
Bras d'onduleur
V 1+
Réseau
E
Signal 1 Amplificateur
1
V 1–
P1
Commande
générale
Pc
T1
Signal 2 Amplificateur
2
V 2–
P2
Isolement
galvanique
Amplificateur
1
T2
E
K1
A
D1
vs
V 2+
Étage de sortie
de la commande
générale
Sortie
Circulation des
courants capacitifs
AM1 ou BL2
AM2 ou BL1
K2
0
Pc
D2
P2
0
AM1, AM2 amorçage K1, amorçage K2
K1, blocage
K2
BL1, BL2 blocage
Les flèches « éclairées » donnent le sens de parcours
des courants parasites.
Figure 21 – Isolement dans un bras d’onduleur
Figure 22 – Influence des couplages capacitifs
capacité parasite de l'ordre du picofarad, soumise à un dv/dt de
5kV/µs, est parcourue par un courant de 5 mA. Il s'agit là d'un
courant tout à fait négligeable dans un environnement de puissance, mais difficilement admissible au niveau d'une commande à
bas niveau (électronique analogique, amplificateur opérationnel,
circuits logiques...).
3.2.2 Couplages capacitifs. Architectures
des chaînes de transmission
Pour juger de l'importance de l'isolement galvanique dynamique
dans la transmission de signaux et de puissance de commande, il
est nécessaire de raisonner sur un schéma réel. Dans un bras
d'onduleur, il existe trois potentiels de référence Pc, P1 et P2 correspondant respectivement à la commande générale, au premier semiconducteur commandé et au second (figure 21). Il est possible de
considérer que les niveaux de tension mis en jeu à l'intérieur des
différents étages de traitement et de transmission des signaux de
commande sont négligeables vis-à-vis des tensions mises en jeu
dans le convertisseur lui-même. Cela revient à négliger les 5 ou 12 V
des étages de commande vis-à-vis des 300 ou 500 ou 2 000 V
d'alimentation du convertisseur.
Dans ces conditions, tous les points d'un même étage de traitement basse tension sont considérés comme équipotentiels et il est
possible de faire apparaître un réseau maillé de liaisons capacitives
entre les semi-conducteurs de puissance du convertisseur. Ce réseau,
excité par les commutations du convertisseur, fait circuler des
courants capacitifs dont les phases relatives favorisent ou entravent
les mécanismes de commutation du convertisseur en fonction des
signes des gains des différents étages d'amplification et de liaison.
La figure 22 illustre ces propos et montre comment un couplage
capacitif peut induire, au sein d'un convertisseur, une réaction si le
gain A de l'amplificateur de commande est négatif (logique de
commande négative) ou une contre-réaction si le gain A de l'amplificateur de commande est positif (logique de commande positive),
contrecarrant ou, au contraire, amplifiant l'effet Miller naturel des
composants. Ainsi, dans le second cas, le dv/dt provoqué par le
blocage de l'interrupteur supérieur ou pire, par l'amorçage de
l'interrupteur inférieur peut conduire au réamorçage intempestif du
premier interrupteur par génération d'un courant capacitif dans la
chaîne de transmission. L'apparition d'un court-circuit de bras, avec
ses conséquences souvent irréversibles, est alors à craindre.
On peut noter ici qu'une inversion de phase bien placée (logique
négative) peut totalement transformer le comportement d'un
convertisseur vis-à-vis d'un dispositif d'isolement galvanique peu
performant.
D 3 177 − 16
3.2.3 Composants de la transmission isolée
Compte tenu des problèmes évoqués au paragraphe 3.2.2, il est
facile de comprendre l'importance de la réduction des capacités
parasites aussi bien dans les éléments assurant la transmission de
signaux de commande que ceux fournissant la puissance de
commande (l'élément d'isolement peut éventuellement assumer les
deux fonctions).
■ Transmission isolée des signaux de commande
S’agissant de transmission de signal, plusieurs solutions sont
possibles :
— coupleur optoélectronique ;
— coupleur par fibre optique ;
— transformateur.
● Le coupleur optoélectronique fonctionne à très bas niveau
d'énergie et le moindre courant capacitif peut être catastrophique.
Écrans et prismes permettent de réduire les capacités parasites
émetteur-récepteur.
● Le coupleur par fibre optique , plus onéreux, est extrêmement
satisfaisant.
● Le transformateur présente très facilement des capacités primaire-secondaire importantes. Il s'accommode très mal de grandes
dynamiques de fréquence et impose une valeur moyenne nulle de la
tension à ses bornes, difficilement réalisable en cas de rapport cyclique variable dans un grand intervalle. Outre l'usage d'écrans électrostatiques placés entre les enroulements et connectés aux
potentiels de référence de l'émetteur et du récepteur, le codage des
signaux d'entrée sous forme impulsionnelle permet de recourir à
des transformateurs de petite taille, ayant peu de spires et présentant donc des capacités primaire-secondaire faibles pour autant que
le bobinage soit correct.
■ Transmission isolée de la puissance de commande
Si elle n'est pas directement prélevée aux bornes du composant à
commander, la puissance de commande doit être transmise par
transformateur, puis redressée et filtrée. Un transformateur à 50 Hz
n'a pratiquement jamais des capacités interenroulements de valeur
convenable et est toujours l'agent de transmission de perturbations
conduites soit vers les composants, soit vers le réseau. Un transformateur à haute fréquence, correctement doté d'écrans connectés
aux bons endroits, est une excellente solution.
Une simple tenue en tension continue d'isolement, pour aussi
élevée soit-elle, n’est en aucun cas la garantie d'un fonctionnement
correct.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
3.3 Retards et temps morts
Commande 1
3.3.1 Origine et influence des retards
Si les amorçages des semi-conducteurs de puissance se font
généralement avec un minimum de retard par rapport à la réception
de l'ordre correspondant, cela ne signifie pas pour autant que la
commutation escomptée soit instantanée. Dans un hacheur, par
exemple, l'amorçage de l'interrupteur commandé déclenche le
début de la commutation du courant de la diode de roue libre, mais
c'est le blocage final de cette dernière qui marque la commutation
effective de tension. Le composant commandé n'est donc pas seul
en cause, les autres acteurs de la cellule, à semi-conducteurs ou
passifs, interviennent également.
Inversement, il est bien connu que de nombreux semi-conducteurs de puissance commandés présentent des retards intrinsèques
au blocage. C'est le cas, notamment, pour tous les composants
bipolaires (GTO, IGBT...). Ces temps de stockage peuvent prendre
des valeurs considérables (10 µs pour un GTO, par exemple), variables dans de grandes proportions selon les conditions de charge, de
température et de commande.
Ces problèmes de stockage peuvent également intervenir au
niveau des circuits de commande. Dans leur conception, il est donc
recommandé de faire appel aux transistors MOSFET (non soumis
aux stockages), aux circuits d'antisaturation des transistors bipolaires, aux étages linéaires (dissipatifs mais beaucoup plus rapides
que les étages fonctionnant en tout ou rien) et, de manière générale,
de confier les actions de protection (blocages) des semi-conducteurs de puissance à des circuits présentant le minimum de retards
intrinsèques.
L'ensemble de ces retards dans la transmission ou l'exécution des
différents ordres engendre, au niveau de l'étage de puissance,
certains décalages fixes ou variables. Si l'on admet que le circuit
convertisseur est un amplificateur qui fournit en sortie le produit de
sa fonction de modulation (élaborée par la commande éloignée) par
sa tension d'alimentation, on voit que tout retard dépendant des
conditions de charge crée une impédance interne au même titre que
l'impédance de la source continue ou la conduction discontinue.
Ces non-linéarités du convertisseur sont à prendre en compte dans
l'élaboration des lois de commande.
Avant
t
Commande 2
t
Commande 1'
Après
t
Commande 2'
t
tmort
tmort
Figure 23 – Introduction d’un temps mort dans une modulation
de largeur d’impulsion
Il est intéressant de regarder de plus près les conséquences de
ces déformations sur la tension de sortie générée par un onduleur.
Nous allons évidemment supposer que c'est le signal avant l'introduction des temps morts qui est représentatif de la modulation que
l'on voudrait idéalement retrouver en sortie. Effectuons un effet de
loupe sur le graphe précédent et regardons comment évolue la
largeur d'une impulsion, en fonction du courant de charge, compte
tenu de l'existence de ces temps morts (figure 24). Nous supposons
négligeable le retard à l'amorçage et tenons compte d'un retard au
blocage tr fonction du courant de charge is.
K1
T1, D1
is
E
K2
T2, D2
3.3.2 Nécessité et influence des temps morts
Dans les structures d'onduleurs, où deux semi-conducteurs
commandés sont placés en série sur une même source de tension,
les retards décrits paragraphe 3.3.1, entre les commandes des semiconducteurs et leurs commutations effectives, prennent une dimension supplémentaire car ils peuvent entraîner l'apparition de courtscircuits transitoires qui provoquent, au mieux, un échauffement
anormal des composants et, au pire, leur destruction.
■ Une pratique quasiment universelle est l'introduction de
temps morts fixes entre l'ordre de blocage d'un composant de la
cellule et l'ordre d'amorçage de son vis-à-vis. La valeur de ces
temps morts est déterminée pour couvrir les cas de retard les plus
importants dans les conditions extrêmes de charge, de température,
de dérive et de dispersion. Elle dépend des composants de puissance utilisés, mais est généralement comprise dans une fourchette
allant de la microseconde à la dizaine de microsecondes.
■ L'influence générale de ces temps morts, associés aux retards
qui motivent leur présence, est de modifier la fonction de modulation effective de la cellule par rapport à la fonction de modulation
supposée idéale générée par la commande éloignée.
Un effet immédiat est indiqué sur la figure 23. Observons une
séquence MLI quelconque (commande 1 et commande 2) passée à
travers un circuit générateur de temps morts fixes, qui transmet
instantanément les ordres de blocage et retarde les amorçages. On
constate aisément les déformations induites avec la possible disparition d'impulsions de largeur proche des temps morts introduits.
vs
Commande initiale T1
tmort
Commande T1
avec temps mort
t
Commande initiale T2
Commande T2
avec temps mort
tmort
t
Tension de sortie vs
souhaitée
tmort
t
Tension de sortie vs
obtenue pour
is > 0
Tension de sortie vs
obtenue pour
tr(is)
is < 0
tr(is)
t
tmort
t
Figure 24 – Influence des temps morts sur la tension
de sortie HF d’une cellule
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 17
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
∆ Vs
is
vsth
E
– ∆Vs
tmort
Td
t
is
vs
– tmort
Td
t
Figure 25 – Influence des temps morts sur la composante BF
Lorsque le courant est positif, les composants concernés par la
conduction de is sont T1 et D2. C'est donc l'amorçage et le blocage
de T1 qui vont déterminer la forme de vs. On constate alors que la
tension de sortie réelle est largement modifiée.
De la même façon, lorsque le courant est négatif, ce sont les
commutations de T2 qui déterminent la forme de vs, avec un impact
complémentaire du cas précédent sur vs.
Il est alors aisé de chiffrer la modification de valeur moyenne HF
de vs induite par ces retards :
— pour is > 0
— pour is < 0
E
< v s > = < v sth > – [ t mort – t r ( i s ) ] ------ = < v sth > – ∆v s
Td
E
< v s > = < v sth > – [ t r ( i s ) – t mort ] ------ = < v sth > – ∆v s
Td
avec vsth tension de sortie théorique souhaitée.
Si l'on suppose un temps de retard tr proportionnel au courant, la
dépendance de ∆vs en fonction du courant de charge est celle de la
figure 25 a. Sur la figure 25 b, nous avons représenté, dans le cas
d'un fonctionnement en modulation de largeur d'impulsion, la
modification de la composante BF de la tension de sortie
qu'entraîne l'existence de ∆vs, en supposant un courant de charge
sinusoïdal, sans ondulation, et en phase avec la tension.
L'approche présentée ici est très schématique. En particulier, la
dépendance exacte de cette chute de tension en fonction de is ne
peut être aussi aisément représentée et va considérablement varier
en fonction du type de composant et de commande utilisés, mais
également en fonction du poids relatif des temps de retard par
rapport à la période de découpage. D'autre part, il y a fatalement
couplage à travers la charge entre la forme de la tension et celle du
courant qui rend improbable la discontinuité de tension que nous
avons fait apparaître figure 25 b. Quoiqu'il en soit, ce phénomène
existe bel et bien et peut induire des distorsions considérables de la
tension de sortie modulée dans le cas de faibles niveaux de tension
associées à de forts courants (exemple de variateurs alimentant des
machines à basse vitesse et fort couple).
■ Dans un convertisseur complexe (onduleur triphasé, par exemple), il peut être tentant de centraliser les fonctions de protection de façon à ne pas les dupliquer au niveau de chaque composant
de puissance. Dans ce cas, il faut disposer d'une information globale
très riche susceptible de représenter les « souffrances » (surintensité, surtension, température excessive) de chacun des composants.
De même, l'action de protection ne peut être que globale, entraînant,
par exemple, l'arrêt complet du convertisseur.
Pour assurer un suivi plus fidèle et plus personnalisé de chacun
des composants, ce qui permet de mieux les protéger et d'en tirer
un maximum de performances, des capteurs individuels doivent
être affectés à la surveillance de chaque composant et leurs informations transmises à l'électronique centrale (avec isolement galvanique). Inversement, pour assurer une protection sélective de
chacun des composants, c'est une réaction individuelle, incluse
dans une stratégie générale, qui doit être transmise au composant
en souffrance (avec isolement galvanique).
■ À l'opposé, on peut imaginer une décentralisation complète
de la protection. Chaque composant est doté de ses capteurs ou
estimateurs de souffrance et le traitement des informations qu'ils
délivrent est réalisé « in situ », à l'intérieur du module de commande
rapprochée, c'est-à-dire sans liaison isolée. L'action qui convient à la
situation est directement transmise au composant concerné. Cette
conception de la protection, extrêmement rapide et efficace, présente
cependant le défaut de ne pas situer l'action spécifique sur un composant dans une stratégie générale. Il est donc souhaitable de compléter ce mode de protection par la transmission (avec isolement) du
compte rendu, a posteriori, de l'action effectuée. Ainsi, l'électronique
centrale, informée de la situation locale, peut définir une nouvelle
stratégie adaptée aux circonstances. La notion d'urgence est moins
cruciale, car la protection rapide est déjà assurée.
Cette deuxième configuration est largement utilisée dans des
modules intégrés industriels qui contiennent les composants de
puissance, leurs commandes et protections rapprochées et des
lignes de dialogue à destination de la commande éloignée. La
figure 26 montre le schéma de principe d'un tel ensemble (ici une
cellule) qui peut inclure un onduleur triphasé complet. L'utilisateur
doit concevoir les alimentions et interconnecter, pour ce qui
concerne la transmission d'informations, la commande éloignée et
ce module par l'intermédiaire d'éléments d'isolement (généralement
des optocoupleurs). De tels composants sont très utilisés dans les
applications de variations de vitesse, à faible et moyenne puissance.
V1+
Amplificateur 1
V1–
Signal 1
PV1
Erreur 1
■ S'il n'est pas concevable de neutraliser totalement ces temps
morts, il est, par contre, envisageable de les minimiser, en temps
réel, en fonction des caractéristiques des composants et des conditions de charge et d'en tenir compte dans l'élaboration de la loi de
commande MLI.
V2+
V2–
D1
T2
D2
PC1
PT1
Signal 2
Erreur 2
C1
T1
PT2
PV2
C2
Amplificateur 2
PC2
3.4 Protections
Tout l'exposé qui précède concerne l'optimisation des fonctionnements « normaux » des convertisseurs. Il faut cependant envisager
les fonctionnements « anormaux » provoqués par une modification
intempestive des conditions externes (source, charge) ou par une
action de la commande globale entraînant le dépassement des
valeurs limites des composants.
D 3 177 − 18
PC
PT
PV
C
protection en courant
protection en température
protection en tension
signal de commande avec prise en compte des protections
Figure 26 – Schéma de principe d’une cellule à protection intégrée
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
_______________________________________________________________________________________________________________ ONDULEURS DE TENSION
3.5 Conception du circuit de puissance
E
K1
3.5.1 Câblage et écrêtage
R
■ Le câblage est une problématique tout à fait générale de la
conversion d'énergie statique à laquelle n'échappent pas les onduleurs de tension.
● À partir du moment où l'on utilise une électronique de commutation mettant en jeu de brutales variations de courant générées par
les commutations commandées des interrupteurs, toute inductance
parasite présente dans la maille de commutation induit des variations de tension (figure 27).
Ces dernières, dans les phases de blocage, se traduisent par
l'apparition de surtensions aux bornes des interrupteurs, qu'il faut
maintenir dans des limites tolérables.
D'autre part, l'énergie stockée dans les inductances parasites,
pendant la conduction d'un interrupteur, est généralement entièrement dissipée dans ce dernier lors de son blocage.
● Dans le cas d'un bras, la maille de commutation inclut les deux
interrupteurs et un inévitable condensateur de découplage placé
aux bornes de la cellule, dont le rôle est double. Il permet de recréer
une source de tension instantanée au plus près du bras et il participe, associé à une inductance d'entrée, au filtrage des composantes harmoniques de courant absorbées par l'onduleur (voir
paragraphe 2.1).
● Les inductances parasites présentes dans la maille sont celles
du condensateur, des composants à semi-conducteurs (câblage
interne des boîtiers) et des liaisons électriques, donc du câblage,
entre ces éléments.
Les deux premiers éléments ne sont du ressort du concepteur que
par le choix des composants. Ainsi, la technologie du condensateur
d'entrée doit permettre de minimiser son inductance interne. Les
fabricants de semi-conducteurs ont maintenant largement optimisé
Inductances
parasites
K1
vT
iT
K2
vT
Blocage
vT
t
iT
Amorçage
Figure 27 – Influence des inductances parasites
=
K2
vT
Cec
Vec
=
vec
vT
iT
t
Blocage
Figure 28 – Principe des circuits d’écrêtage
les connexions internes de leurs composants modulaires omniprésents dans les gammes de puissance jusqu'à quelques centaines
de kilovoltampères. L'ordre de grandeur de ces inductances est de
quelques dizaines de nanoheurys.
Le troisième bloc est entièrement à la charge du concepteur qui
doit, par un câblage astucieux entre les différents éléments, minimiser les inductances d'interconnexions. L'utilisation de modules
en bras résout le problème de l'interconnexion entre composants.
La liaison entre le condensateur de découplage et la cellule devient
cruciale et l'introduction de connexions planes (ou busbar) dans
lesquelles les conducteurs aller et retour sont coplanaires (inductance parasite très faible) donne d'excellents résultats.
■ Tous ces efforts peuvent néanmoins se révéler insuffisants, si les
dimensions des différents éléments sont telles que les inductances
résiduelles restent trop élevées. Cela est particulièrement vrai en
forte puissance. Un autre type de configuration délicate intervient
dans les onduleurs à basses tensions et à forts courants dans lesquels les surtensions relatives sont beaucoup plus élevées.
Dans les deux cas, l'introduction de dispositifs d'écrêtage peut
s'avérer indispensable. Ces dispositifs doivent être placés au plus
près du composant afin de ne pas retomber dans le problème précédent. Le principe de tels circuits est donné sur la figure 28. Nous n'y
avons représenté que l'étage d'écrêtage de l'interrupteur inférieur
K2.
Un couple condensateur-diode Cec et Dec est connecté directement aux bornes du composant. Si l'on fait l'hypothèse initiale
d'une tension Vec > E présente aux bornes de Cec, lors du blocage, le
courant correspondant à l'énergie stockée dans les inductances de
câblage va circuler dans la maille Cec, Dec, celle-ci va limiter la
tension appliquée à l'interrupteur à cette valeur Vec. Lorsque
l'énergie est entièrement transferrée dans Cec, le courant s'annule et
la maille se bloque. La valeur du condensateur doit permettre
d'éviter une variation de Vec pendant cette phase.
Condensateur
de découplage
iT
Dec
iT
t
D'autre part, Cec ne sert que de réservoir transitoire et il faut recycler cette énergie de commutation tout en contrôlant le niveau de
Vec. Cette fonction est assurée :
— soit, de façon rudimentaire par une résistance R placée entre
Vec et E (énergie dissipée), auquel cas Vec varie avec le courant
commuté ;
— soit, de façon plus élaborée, par un convertisseur DC-DC
(continu-continu) qui renvoie l'énergie sur la source E et qui impose
une tension Vec constante.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
D 3 177 − 19
ONDULEURS DE TENSION ________________________________________________________________________________________________________________
Cette dernière structure est utilisée lorsque les énergies de
commutation sont considérables et induiraient des pertes inacceptables. C'est le cas dans les onduleurs de forte puissance à GTO.
3.5.2 Circuits d’aide à la commutation (CALC)
Toujours dans le cadre de la minimisation des contraintes sur les
interrupteurs, on peut se poser la question de la réduction des
pertes par commutation. Les structures et les principes de fonctionnement des circuits d'aide à la commutation permettant d'atteindre
cet objectif sont bien connus dans les configurations de type
hacheur.
Leur extrapolation à la cellule d'onduleur conduit à des schémas
tels que celui représenté sur la figure 29 :
— c1 et c2 sont les condensateurs d'aide au blocage ; < 1 et < 2
sont les inductances d'aide à l'amorçage ;
— l'énergie stockée dans ces différents éléments lors des phases
de commutation est dissipée dans les résistances R1 et R2.
Nous n’entrerons pas ici dans le détail du fonctionnement de cet
ensemble, mais il est important de souligner une particularité liée à
la structure de la cellule. Dans un schéma de type hacheur, il est
classique de décharger le condensateur d'aide au blocage dans une
résistance lorsque l'on amorce le composant correspondant. Dans
cette cellule d'onduleur, à l'amorçage d'un interrupteur (par
exemple T1) va correspondre la décharge de son condensateur
d'assistance (c1) mais également la charge du condensateur opposé
c2, initialement déchargé, via les inductances < 1 et < 2 (figure 29).
E
T1
Ce mécanisme, qui se développe dans une maille résonnante
(éventuellement amortie par R1 et R2), induit une contrainte en
courant supplémentaire très importante à l'amorçage et conduit à
l'apparition d'une surtension considérable sur l'interrupteur bloqué.
En résumé, la forme de la cellule entraîne une très forte interaction
des deux circuits dont les effets secondaires néfastes diminuent
fortement l'intérêt.
En réalité, les CALC ne sont quasiment jamais utilisés en petite et
moyenne puissance (P inférieure ou égale à quelques centaines de
kilowatts), du fait de leur complexité donc de leur coût, de leur fonctionnement discutable et, surtout, du fait du développement de
composants aux performances dynamiques leur permettant de
fonctionner sans assistance aux fréquences requises par la plupart
des applications.
Dans le domaine des onduleurs de très grande puissance
(P > 1MW), dans lequel les GTO dominent toujours encore largement, ces circuits sont par contre incontournables. Indépendamment du problème des pertes par commutation, les di/dt et les dv/dt
appliqués à un GTO doivent absolument être limités, les premiers
par des inductances série, les seconds par des condensateurs parallèle. Pour des raisons un peu différentes, on retrouve donc, dans ces
onduleurs, des circuits similaires à celui de la figure 29. Les
problèmes d'interaction que l’on vient d’évoquer demeurent, mais
l'on est maintenant obligé de s'en accommoder. Compte tenu des
puissances de commutation considérables mises en jeu (pouvant
atteindre plusieurs dizaines de kilowatts pour un onduleur de quelques mégawatts), on modifie le circuit de base pour en récupérer
l'essentiel (figure 30).
Les résistances de dissipation sont remplacées par des sources de
tension (une seule représentée sur le schéma) constituées de
convertisseurs DC-DC (structure similaire à celle de l'écrêteur de la
figure 28) permettant la réinjection de l'énergie sur l'alimentation E.
c1
E
R1
S
,1
c1
GTO1
,2
+
,1
R2
=
S
T2
,2
c2
Vec
0
GTO2
Le circuit en trait gras indique la circulation des courants
indésirables de charge des condensateurs
Figure 29 – CALC dans une cellule d’onduleur
+
=
c2
0
Figure 30 – CALC récupératifs dans les onduleurs à GTO
Références bibliographiques
régulation des courants. Thèse de doctorat
de l’INPT, Toulouse, 1988.
Ouvrages
[1]
[2]
[3]
ARNOULD (J.) et MERLE (P.). – Dispositifs de
l’électronique de puissance, volumes 1 et 2,
Éditions Hermes, 1992.
HOLTZ (J.). – Pulsewidth modulation for electronic power conversion, Proceedings IEEE,
82(8), pp. 1194-1214, 1994.
SEIXAS (P.F.). – Commande numérique d’une
machine synchrone autopilotée. Méthode
algébrique de modulation de largeur
d’impulsion. Algorithmes de contrôle et de
D 3 177 − 20
[6]
[7]
Dans les Techniques de l’Ingénieur
Traité Génie électrique
[4]
[5]
[8]
FOCH (H.), FOREST (F.) et MEYNARD (T.). –
Onduleurs de tension. Structures. Principes.
Applications. D 3 176, 1998.
[9]
LETURCQ (P.). – Composants semi-conducteurs de puissance : caractères propres.
D 3 100, 1999.
[10]
LETURCQ (P.). – Physique des semi-conducteurs de puissance. D 3 102, 1999.
LOUIS (J.-P.) et BERGMANN (C.). – Commande numérique, systèmes triphasés :
régime permanent. D 3 642, 1997.
LOUIS (J.-P.) et BERGMANN (C.). – Commande numérique, régimes intermédiaires
et transitoires. D 3 643, 1997.
GLAIZE (C.). – Électronique de puissance.
Commande des composants actifs. D 3120,
1989.
POLOUJADOFF (M.). – Machines asynchrones. Régimes quelconques. D 3 485, 2000.
Toute reproduction sans autorisation du Centre français d’exploitation du droit de copie est strictement interdite.
© Techniques de l’Ingénieur, traité Génie électrique
© Copyright 2026 Paperzz