CCP PSI 2014 Simulateur de conduite
Réponse 1
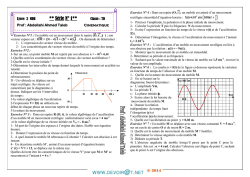
Zone 1 : accélération en ligne droite (accélération longitudinale positive et latérale nulle)
Zone 2 : freinage en ligne droite (accélération longitudinale négative et latérale nulle)
Zone 3 : virage à droite (accélération latérale négative, centripète)
Zone 4 : virage à gauche (accélération latérale positive, centripète)
Les zones entourées correspondent aux changements de rapport de la boîte à vitesses.
Réponse 2
𝑎𝑎
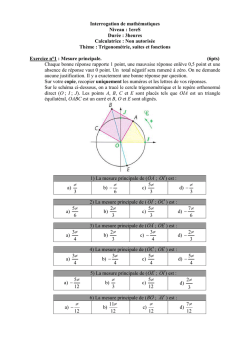
Pendant la phase de montée, l’accélération vaut : 𝑎𝑎(𝑡𝑡) = 𝑚𝑚𝑚𝑚𝑚𝑚 . 𝑡𝑡
En intégrant : 𝑣𝑣(𝑡𝑡) =
𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚 𝑡𝑡 2
.2
𝑡𝑡𝑎𝑎
𝑥𝑥(𝑡𝑡) =
𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚 𝑡𝑡 3
.6
𝑡𝑡𝑎𝑎
𝑡𝑡𝑎𝑎
(vitesse et position initiales nulles)
Ainsi la distance parcourue pendant la phase de montée est égale à : 𝑥𝑥(𝑡𝑡𝑎𝑎 ) =
A.N. : 𝑥𝑥(𝑡𝑡𝑎𝑎 ) = 0,26𝑚𝑚.
𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚
6
. 𝑡𝑡𝑎𝑎2 .
Pendant la seconde phase, l’accélération est constante et vaut : amax
𝑎𝑎
On a donc :
𝑣𝑣(𝑡𝑡) = 𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚 . (𝑡𝑡 − 𝑡𝑡𝑎𝑎 ) + 𝑚𝑚𝑚𝑚𝑚𝑚 . 𝑡𝑡𝑎𝑎
(𝑡𝑡−𝑡𝑡𝑎𝑎 )2
2
𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚
+ 2 . 𝑡𝑡𝑎𝑎 . (𝑡𝑡
− 𝑡𝑡𝑎𝑎 ) + 𝑥𝑥(𝑡𝑡𝑎𝑎 )
Et
𝑥𝑥(𝑡𝑡) = 𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚 . 2
Pour 𝑡𝑡 = 𝑡𝑡𝑚𝑚 + 𝑡𝑡𝑎𝑎 , on obtient donc une distance parcourue de :
𝑥𝑥(𝑡𝑡𝑚𝑚 + 𝑡𝑡𝑎𝑎 ) = 𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚 .
𝑡𝑡𝑚𝑚 2
2
+
𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚
. 𝑡𝑡𝑎𝑎 . 𝑡𝑡𝑚𝑚
2
+ 𝑥𝑥(𝑡𝑡𝑎𝑎 )
La distance parcourue pendant la seconde phase est 𝑥𝑥(𝑡𝑡𝑚𝑚 + 𝑡𝑡𝑎𝑎 ) − 𝑥𝑥(𝑡𝑡𝑎𝑎 ) =
A.N. : 𝑥𝑥(𝑡𝑡𝑚𝑚 + 𝑡𝑡𝑎𝑎 ) − 𝑥𝑥(𝑡𝑡𝑎𝑎 ) = 50𝑚𝑚
𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚
. 𝑡𝑡𝑚𝑚 . (𝑡𝑡𝑎𝑎
2
+ 𝑡𝑡𝑚𝑚 )
Réponse 3
L’exigence d’encombrement 1.4 ne sera pas satisfaite car les distances nécessaires pour
reproduire ces accélérations sont trop grandes.
Réponse 4
Constituants :
1 : volant ; 2 : pédalier ; 3 : unité centrale ; 4 : enceintes ; 5 : écran ; 6 : boitier SX3000
Réponse 5
Chaîne d’information : volant, pédalier, unité centrale, écran, enceintes.
Chaîne d’énergie : structure articulée, vérins, boitier SX3000.
Réponse 6
Calcul de la vitesse puis de l’accélération de A par rapport à 𝑅𝑅0 :
�⃗ (𝐴𝐴, 1/𝑅𝑅0 ) = 𝑉𝑉
�⃗ (𝑂𝑂, 1/𝑅𝑅0 ) + �Ω
�⃗(1/𝑅𝑅0 ) ∧ �����⃗
𝑦𝑦1 ∧ ℎ. ���⃗
𝑧𝑧1 = ℎ. 𝛼𝛼̇ . ����⃗
𝑥𝑥1
𝑂𝑂𝑂𝑂 = 𝛼𝛼̇ . ����⃗
𝑉𝑉
𝑑𝑑
�⃗ (𝐴𝐴, 1/𝑅𝑅0 )� = ℎ. α̈ . 𝑥𝑥⃗1 − ℎ. α̇ 2 . 𝑧𝑧⃗1
𝑎𝑎⃗(𝐴𝐴, 1/𝑅𝑅0 ) = �𝑉𝑉
𝑅𝑅
𝑑𝑑𝑑𝑑
0
Il faut projeter 𝑎𝑎
����⃗
⃗(𝐴𝐴, 1/𝑅𝑅0 ) − 𝑔𝑔⃗ sur 𝑥𝑥
����⃗et
���⃗1 avec 𝑔𝑔⃗ = −𝑔𝑔. 𝑧𝑧⃗0 = −𝑔𝑔. (cosα. 𝑧𝑧⃗1 − sinα. 𝑥𝑥⃗1 ) :
𝑇𝑇 = 𝑎𝑎
1 𝑧𝑧
D'où les relations à démontrer.
Réponse 7
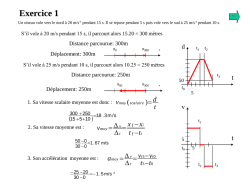
Les diagrammes de Bode proposés semblent correspondre à la fonction de transfert d’un
𝐾𝐾
) car :
premier ordre (𝐻𝐻𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 (𝑝𝑝) =
•
•
•
1+𝑇𝑇𝑇𝑇
asymptote horizontale pour le diagramme des gains dans les basses pulsations,
asymptote de pente -20 dB/dec pour le diagramme des gains dans les hautes pulsations,
la phase n'a qu'un point d'inflexion et décroit de 0° à -90°.
Lycée Alphonse Daudet – Nîmes – CPGE PSI et MP
CCP PSI 2014 (corrigé modifié).docx
Page 1
On relève un gain 𝐾𝐾 = 1 (asymptote horizontale dans les basses pulsations de gain 20𝑙𝑙𝑙𝑙𝑙𝑙(𝐾𝐾) =
1
0) et une constante de temps de 𝑇𝑇 = 0,1𝑠𝑠 (pulsation de = 10𝑟𝑟𝑟𝑟𝑟𝑟/𝑠𝑠 correspondant à une phase
𝑇𝑇
de -45° et un gain de -3dB).
Réponse 8
En régime établi (accélération 𝑎𝑎 𝑇𝑇𝑇𝑇 =const et 𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 =const) : 𝑎𝑎 𝑇𝑇𝑇𝑇 = −𝑔𝑔. 𝑠𝑠𝑠𝑠𝑠𝑠(𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 ).
𝑎𝑎
𝜋𝜋
𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 =– 𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎(𝑎𝑎𝑇𝑇𝑇𝑇 /𝑔𝑔)
� 𝑔𝑔𝑇𝑇𝑇𝑇 � < 1 et |𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 | < 2
Réponse 9
En régime établi : 𝑎𝑎𝑇𝑇𝑇𝑇 − 𝑔𝑔 = 𝑔𝑔. (𝑐𝑐𝑐𝑐𝑐𝑐(𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 ) − 1). Pour respecter le seuil : �𝑎𝑎 𝑇𝑇𝑇𝑇 – 𝑔𝑔 � < 0,25𝑚𝑚. 𝑠𝑠 −2 :
1 − 𝑐𝑐𝑐𝑐𝑐𝑐(𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 ) < 0,25/9,8 et donc 1 – 0,25/9,8 <cos(αtilt)
Il est déduit que : αtilt∈ [-13°; 13°]
Réponse 10
Accélération maximale longitudinale en régime établi (pour 𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 = −13°) ∶
𝑎𝑎𝑇𝑇𝑇𝑇 = −𝑔𝑔. 𝑠𝑠𝑠𝑠𝑠𝑠(𝛼𝛼𝑡𝑡𝑡𝑡𝑡𝑡𝑡𝑡 ) = 2,2𝑚𝑚. 𝑠𝑠 −2 (pour une accélération positive, l’angle négatif).
Il faut donc prendre un gain d’adaptation 𝐾𝐾𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎𝑎 = 2,2/10 = 0,22 pour que l’accélération ne
dépasse pas les limites d’angle autorisées (Les accélérations restituées seront donc environ
quatre fois plus faibles que les accélérations réelles.).
Réponse 11
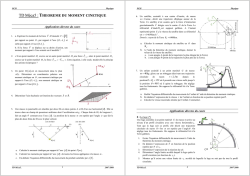
Pour tracer il est possible :
• soit de calculer les équations des
asymptotes,
• soit de sommer les diagrammes
1
des fonctions
et 𝜏𝜏𝜏𝜏 (ce
1+𝜏𝜏𝜏𝜏
dernier diagramme étant le
symétrique par rapport à l’axe
des abscisses du diagramme de la
1
fonction ).
𝜏𝜏𝜏𝜏
Ce filtre passe-haut laisse passer les
hautes fréquences uniquement ce qui
correspond à des variations rapides
de l’accélération (vibrations).
Réponse 12
Transformation de Laplace (conditions initiales nulles) : 𝐴𝐴𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = ℎ. 𝑝𝑝2 . 𝛼𝛼𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝)
(𝑝𝑝)
𝛼𝛼
1
Donc
𝐻𝐻𝑚𝑚𝑚𝑚𝑚𝑚2 (𝑝𝑝) = 𝐴𝐴𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = 2
ℎ.𝑝𝑝
𝑚𝑚𝑚𝑚𝑚𝑚
Réponse 13
La réponse 𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚 (𝑡𝑡) à un échelon d’accélération d’amplitude 𝑎𝑎0 est facilement calculable :
𝑎𝑎
τ.𝑝𝑝 𝑎𝑎0
𝑎𝑎
𝐴𝐴𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = 𝐻𝐻𝑚𝑚𝑚𝑚𝑚𝑚1 (𝑝𝑝). 0 =
. = 10
𝑝𝑝
1+τ.𝑝𝑝 𝑝𝑝
( +𝑝𝑝)
τ
𝑡𝑡
La transformée inverse est (voir tableau en annexe du cours) : 𝑎𝑎𝑚𝑚𝑚𝑚𝑚𝑚 (𝑡𝑡) = 𝑎𝑎0 𝑒𝑒 −𝜏𝜏 (correspond
bien à la première courbe, ce filtre annule la composante constante de l’accélération)
La réponse 𝛼𝛼𝑚𝑚𝑚𝑚𝑚𝑚 (𝑡𝑡) à un échelon d’accélération d’amplitude 𝑎𝑎0 est plus difficile à calculer :
τ. 𝑝𝑝
1 𝑎𝑎0
τ. 𝑎𝑎0
𝑎𝑎0
.
. =
α𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = 𝐻𝐻𝑚𝑚𝑚𝑚𝑚𝑚1 (𝑝𝑝). 𝐻𝐻𝑚𝑚𝑚𝑚𝑚𝑚2 (𝑝𝑝). =
𝑝𝑝
1 + τ. 𝑝𝑝 ℎ. 𝑝𝑝² 𝑝𝑝
ℎ. 𝑝𝑝². (1 + τ. 𝑝𝑝)
La valeur finale : 𝑙𝑙𝑙𝑙𝑙𝑙 (α𝑚𝑚𝑚𝑚𝑚𝑚 (𝑡𝑡)) = lim (𝑝𝑝. α𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝)) = +∞ (en accord avec la courbe)
𝑡𝑡→∞
𝑝𝑝→0
L'angle 𝛼𝛼𝑚𝑚𝑚𝑚𝑚𝑚 atteint rapidement une valeur trop importante …
Lycée Alphonse Daudet – Nîmes – CPGE PSI et MP
CCP PSI 2014 (corrigé modifié).docx
Page 2
Réponse 14
La réponse 𝛼𝛼𝑚𝑚𝑚𝑚𝑚𝑚 (𝑡𝑡) à un échelon d’accélération d’amplitude 𝑎𝑎0 avec filtre Washout :
𝐾𝐾.𝑝𝑝
𝑎𝑎
α𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = (1+τ.𝑝𝑝)3 . 0
𝑝𝑝
Le théorème de la valeur finale donne : 𝑙𝑙𝑙𝑙𝑙𝑙 α𝑚𝑚𝑚𝑚𝑚𝑚 (𝑡𝑡) = lim 𝑝𝑝. α𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = 0
𝑡𝑡→∞
𝑝𝑝→0
Réponse 15
On remarque que α est négatif pour une accélération positive (inclinaison vers l’arrière).
On constate que l’accélération aTx en régime permanent correspond bien à la valeur attendue
(diminué par le gain Kadapt).
La variation d’accélération aTz en régime permanent est bien contenue dans une fourchette de
±0,25𝑚𝑚. 𝑠𝑠 −2 .
Réponse 16
Réponse 17
Déplacement vérin a
+
+
Déplacement vérin b
+
-
Mouvement du siège
Tangage (sens direct)
Roulis (sens direct)
Réponse 18
Indice de mobilité : 𝑖𝑖𝑚𝑚 = 𝐼𝐼𝑐𝑐 − 𝐸𝐸𝑐𝑐 = (2 × 1 + 2 × 1 + 4 × 3) − 6(8 − 7 + 1) = 4
Degré de mobilité : 𝑚𝑚 = 𝑚𝑚𝑢𝑢 + 𝑚𝑚𝑖𝑖 = 2 + 2 = 4
(Il y a en effet 2 mobilités utiles (les allongements des deux vérins) et 2 mobilités internes
(rotation propre des vérins).
Degré d’hyperstatisme : ℎ = 𝑚𝑚 − 𝑖𝑖𝑚𝑚 = 0. Le modèle est isostatique.
Un modèle isostatique permet de déterminer tous les efforts de liaison.
Un modèle isostatique n’indique aucune contrainte géométrique de montage.
Réponse 19
�����⃗ + �����⃗
𝐴𝐴𝐴𝐴 + �����⃗
𝐵𝐵𝐵𝐵 = �0⃗ et donc ℎ. 𝑧𝑧���⃗1 − 𝜆𝜆. ����⃗
𝑥𝑥3 + 𝐿𝐿. 𝑥𝑥
����⃗0 = �0⃗
Fermeture géométrique : 𝑂𝑂𝑂𝑂
Par projection :
Sur 𝑥𝑥
����⃗0 : ℎ. sin(𝛼𝛼) − 𝜆𝜆 cos(𝛽𝛽) + 𝐿𝐿 = 0
Sur 𝑧𝑧���⃗0 : ℎ. cos(𝛼𝛼) + 𝜆𝜆 sin(𝛽𝛽) = 0
Donc : 𝜆𝜆2 =(ℎ. sin(𝛼𝛼) + 𝐿𝐿)² + (ℎ. cos(𝛼𝛼))² et donc 𝜆𝜆 = �ℎ² + 𝐿𝐿² + 2. 𝐿𝐿. ℎ. 𝑠𝑠𝑠𝑠𝑠𝑠(𝛼𝛼)
ℎ.cos(𝛼𝛼)
En formant le rapport des deux projections : tan(𝛽𝛽) = − ℎ.sin(𝛼𝛼)+𝐿𝐿
Réponse 20
Lycée Alphonse Daudet – Nîmes – CPGE PSI et MP
CCP PSI 2014 (corrigé modifié).docx
Page 3
Le vérin se déplace de 0,075m autour de la longueur initiale de 0,99 m. En utilisant le DR 5 il est
déduit que l’angle α ne varie que de ± 8°. Cette amplitude est inférieure à celle du cahier des
charges ( ±13°).
Réponse 21
𝐾𝐾𝛽𝛽 = 0,5 ; 𝛽𝛽0 = −45° ; 𝐾𝐾𝛼𝛼 = 0,0083 𝑚𝑚/° = 0,476𝑚𝑚/𝑟𝑟𝑟𝑟𝑟𝑟 ; 𝜆𝜆0 = 0,99𝑚𝑚
Réponse 22
Le vérin {3,2} est soumis à deux actions mécaniques qui sont des glisseurs :
𝑅𝑅�⃗
𝑅𝑅�⃗
ℱ(0 → 3) = � 03 �
ℱ(1 → 2) = � 12 �
�⃗
�⃗
𝐵𝐵 0
𝐴𝐴 0
Le PFS appliqué à {3,2} permet de démontrer que les deux glisseurs ont même support (AB). Les
����⃗.
résultantes des glisseurs, étant colinéaires au support, sont donc portées par 𝑥𝑥
3 L’action de 2
sur 1 sera donc de la forme :
𝐹𝐹𝑥𝑥
����⃗
ℱ(2 → 1) = −ℱ(1 → 2) = � 3 �
�
⃗
𝐴𝐴 0
Réponse 23
PFD appliqué à 1={conducteur + siège} :
𝒟𝒟(1/𝑅𝑅0 ) = ℱ(𝑝𝑝𝑝𝑝𝑝𝑝 → 1) + ℱ(2 → 1) + ℱ(0 → 1)
����⃗0 (pour ne pas faire intervenir les inconnues de la
Equation de moment en O en projection sur 𝑦𝑦
����⃗0 :
liaison pivot d’axe O𝑦𝑦
��⃗𝑂𝑂 (𝑝𝑝𝑝𝑝𝑝𝑝 → 1). 𝑦𝑦
��⃗𝑂𝑂 (2 → 1). ����⃗
��⃗𝑂𝑂 (0 → 1). ����⃗
����⃗0 + 𝑀𝑀
𝑦𝑦0 = 𝑀𝑀
𝑦𝑦0 + 𝑀𝑀
𝑦𝑦0
𝛿𝛿⃗𝑂𝑂 (1/𝑅𝑅0 ). ����⃗
𝑑𝑑²𝛼𝛼
�����⃗
�����⃗
�
⃗
𝐽𝐽.
𝑦𝑦0 + �𝑂𝑂𝑂𝑂 ∧ 𝐹𝐹. 𝑥𝑥
𝑦𝑦0 + 0
= �𝑂𝑂𝑂𝑂 ∧ −𝑚𝑚. 𝑔𝑔. ���⃗�.
𝑧𝑧0 ����⃗
����⃗�.
3 ����⃗
𝑑𝑑𝑑𝑑²
(solide en rotation autour d’un axe fixe)
𝑑𝑑²𝛼𝛼
𝑑𝑑𝑑𝑑²
𝑑𝑑²𝛼𝛼
𝐽𝐽.
𝑑𝑑𝑑𝑑²
𝐽𝐽.
= (𝑑𝑑. ���⃗
𝑧𝑧1 ∧ −𝑚𝑚. 𝑔𝑔. ���⃗).
𝑧𝑧0 ����⃗
����⃗).
𝑦𝑦0 + (ℎ. 𝑧𝑧���⃗1 ∧ 𝐹𝐹. 𝑥𝑥
𝑦𝑦0
3 ����⃗
= (𝐹𝐹. ℎ. cos(𝛽𝛽 − 𝛼𝛼) + 𝑑𝑑. 𝑚𝑚. 𝑔𝑔. sin(𝛼𝛼))
Il est déduit : As = J ; Bs = h ; Cs = d.m.g
Réponse 24
𝐴𝐴 .𝛼𝛼̈ −𝐶𝐶𝑠𝑠 .sin(𝛼𝛼)
𝑎𝑎 +𝑔𝑔.sin(𝛼𝛼)
avec 𝛼𝛼̈ = 𝑇𝑇𝑇𝑇
(question 6)
Nous avons donc : 𝐹𝐹 = 𝐵𝐵𝑠𝑠 .cos(𝛽𝛽−𝛼𝛼)
ℎ
Donc
𝐹𝐹 =
𝑠𝑠
𝑎𝑎 +𝑔𝑔.sin(𝛼𝛼)
𝐴𝐴𝑠𝑠 . 𝑇𝑇𝑇𝑇
−𝐶𝐶𝑠𝑠 .sin(𝛼𝛼)
ℎ
𝐵𝐵𝑠𝑠 .cos(𝛽𝛽−𝛼𝛼)
On lit sur le document réponse que β = -38° pour α = 13°. On obtient alors F = -179 N.
L’effort (en valeur absolue) est bien inférieur aux 200 N délivrés par le vérin.
L’effort délivré par le vérin satisfait le cahier des charges mais sa course est insuffisante.
Réponse 25
La partie précédente a permis de montrer que 𝜆𝜆 = 𝐾𝐾𝛼𝛼 . 𝛼𝛼 + 𝜆𝜆0 .
𝑝𝑝
Par ailleurs, nous avons : 𝜆𝜆̇ = 𝑣𝑣 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚
2𝜋𝜋
𝑝𝑝
𝑣𝑣
. 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚
𝛼𝛼̇ = 2𝜋𝜋.𝐾𝐾
𝛼𝛼
et donc :
𝑝𝑝
𝑣𝑣
𝑘𝑘 𝑇𝑇 = 2𝜋𝜋.𝐾𝐾
= 10−3
𝛼𝛼
Réponse 26
2
+ 𝐽𝐽. 𝛼𝛼̇ 2
L’énergie cinétique du simulateur est égale à : 2. 𝐸𝐸𝑐𝑐 = 𝐽𝐽𝑚𝑚𝑚𝑚𝑚𝑚 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚
(𝛽𝛽 est supposé constant et toutes les inerties autres que celle du rotor et du siège sont négligées)
2
Ainsi : 2. 𝐸𝐸𝑐𝑐 = (𝐽𝐽𝑚𝑚𝑚𝑚𝑚𝑚 . +𝐽𝐽. 𝑘𝑘 𝑇𝑇2 ). 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚
A.N. : 𝐽𝐽𝑒𝑒 = 4. 10−6 + 1. 10−5 = 1,4. 10−5 𝑘𝑘𝑘𝑘. 𝑚𝑚2
On constate donc qu’on ne peut pas négliger de terme dans l’inertie équivalente étant donné que
l’ordre de grandeur est le même pour les deux termes.
Réponse 27
Lycée Alphonse Daudet – Nîmes – CPGE PSI et MP
CCP PSI 2014 (corrigé modifié).docx
Page 4
Puissances extérieures (seule est non nulle l’action de pesanteur) :
Le système est soumis à l’action de la pesanteur (seule est prise en compte l’action de la
pesanteur sur 1 :
𝑃𝑃(𝑝𝑝𝑝𝑝𝑝𝑝 → 1/𝑅𝑅0 ) = (𝑑𝑑. 𝛼𝛼̇ . ����⃗).
𝑥𝑥1 (−𝑚𝑚. 𝑔𝑔. ���⃗)
𝑧𝑧0 = −𝑚𝑚. 𝑔𝑔. 𝑑𝑑. 𝛼𝛼̇ . sin(𝛼𝛼)
Puissances intérieures (seule est non nulle la puissance des actions mutuelles entre le stator et
le rotor (tous les deux inclus dans l’ensemble isolé) :
𝑃𝑃(𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠𝑠 ↔ 𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟𝑟) = (𝐶𝐶𝑚𝑚𝑚𝑚𝑚𝑚 + 𝐶𝐶𝑣𝑣 ). 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚 = (𝐶𝐶𝑚𝑚𝑚𝑚𝑚𝑚 − 𝑓𝑓𝑣𝑣 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚 ). 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚
Réponse 28
𝑑𝑑𝐸𝐸
Le théorème de l’énergie cinétique dans le référentiel galiléen donne : 𝑑𝑑𝑑𝑑𝑐𝑐 = 𝒫𝒫𝑒𝑒𝑒𝑒𝑒𝑒 + 𝒫𝒫𝑖𝑖𝑖𝑖𝑖𝑖
2
Soit : 𝐽𝐽𝑒𝑒 . 𝜔𝜔̇ 𝑚𝑚𝑚𝑚𝑚𝑚 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑚𝑚. 𝑑𝑑. 𝑔𝑔. 𝛼𝛼̇ . sin(𝛼𝛼) − 𝑓𝑓𝑉𝑉 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚
+ 𝐶𝐶𝑚𝑚𝑚𝑚𝑚𝑚 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚
Nous avons de plus : 𝛼𝛼̇ = 𝑘𝑘 𝑇𝑇 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚 et sin(𝛼𝛼) ≈ 𝛼𝛼 = 𝑘𝑘 𝑇𝑇 . 𝜃𝜃𝑚𝑚𝑚𝑚𝑚𝑚 (𝛼𝛼 petit)
D’où : 𝐽𝐽𝑒𝑒 . 𝜔𝜔̇ 𝑚𝑚𝑚𝑚𝑚𝑚 = 𝑚𝑚. 𝑑𝑑. 𝑔𝑔. 𝑘𝑘 𝑇𝑇2 . 𝜃𝜃𝑚𝑚𝑚𝑚𝑚𝑚 − 𝑓𝑓𝑉𝑉 . 𝜔𝜔𝑚𝑚𝑚𝑚𝑚𝑚 + 𝐶𝐶𝑚𝑚𝑚𝑚𝑚𝑚
Nous obtenons donc : 𝐾𝐾 = 𝑚𝑚. 𝑑𝑑. 𝑔𝑔. 𝑘𝑘 𝑇𝑇2
Réponse 29
L’équation obtenue par le théorème de l’énergie cinétique après transformation de Laplace dans
des conditions initiales nulles : (𝐽𝐽. 𝑝𝑝2 + 𝑓𝑓𝑉𝑉 . 𝑝𝑝 − 𝐾𝐾). 𝜃𝜃𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = 𝑘𝑘𝑖𝑖 . 𝐼𝐼(𝑝𝑝)
(𝑝𝑝)
𝜃𝜃
𝑘𝑘
𝐻𝐻𝑚𝑚𝑚𝑚𝑚𝑚 (𝑝𝑝) = 𝑚𝑚𝑚𝑚𝑚𝑚
= (𝐽𝐽.𝑝𝑝2 +𝑓𝑓𝑖𝑖 .𝑝𝑝−𝐾𝐾)
𝐼𝐼(𝑝𝑝)
𝑉𝑉
Lycée Alphonse Daudet – Nîmes – CPGE PSI et MP
CCP PSI 2014 (corrigé modifié).docx
Page 5
© Copyright 2026 Paperzz