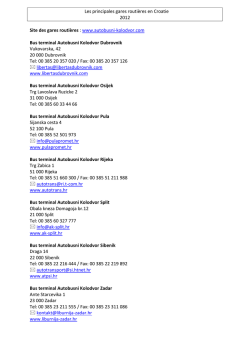
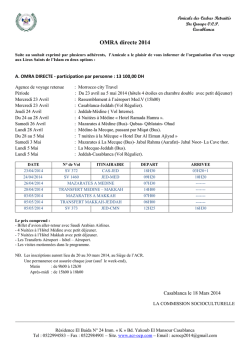
Lycée Eugène IONESCO TSTI2D - SIN STI2D - Système d'Information et Numérique SIN TD TP Cours Synthèse Devoir Evaluation Projet Document ressource LE BUS CAN 1 – LE BUS CAN Le bus CAN (……………………………………………………………) est un …………………………………………… permettant la ………………………………………………… de données numériques. Il s'agit d'un ……………………… et ……………………… (tous les nœuds ont les mêmes droits). Ce bus possède des mécanismes de protection du protocole qui garantit une ……………………………… de la transmission. Les nœuds (hôtes) de ce bus …………………………………………………… seuls les messages transmis possèdent un …………………………………………. Protocoles CAN CAN 2.0A ou CAN …………… CAN 2.0B ou CAN …………… L’identificateur des messages est constitué de ……………… ce qui permet de délivrer …………………………………… différents L’identificateur des messages est constitué de ……………… ce qui permet de délivrer …………………………………………………… différents Interfaces CAN Cette interface présente un débit max de ……………… CAN ……………… et peut raccorder jusqu’à ………………………………. Dans ou CAN-LS l'automobile, il est appelé ………………………… et utilisé pour la climatisation, la radio, le tableau de bord … ; Cette interface présente un débit max ……………… et CAN ……………… peut raccorder jusqu’à ………………………………. Dans ou CAN-HS l'automobile, il est utilisé pour les …………………………… ……………………………… (freinage, moteur …) 2 – SUPPORT DE TRANSMISSION Un bus CAN est donc constitué de deux fils : ……………… (CAN Low) et ……………… (CAN High). Le Signal CAN transmis est obtenu par la ………………………………………………………………………………. La ligne du bus doit se terminer par des ……………………………………………………………… (RT). Le bus CAN Page n°1/3 Lycée Eugène IONESCO TSTI2D - SIN Microcontrôleur Les nœuds sont câblés sur le bus de telle manière qu'en cas d'émission simultanée de deux nœuds, le ………………………………………………………………………… : Le NL0 est donc appelé ……………………………… et le NL1, ………………………………. La transmission différentielle du signal sur le bus CAN assure …………………………………………………………… car les deux lignes du bus sont affectées de la même manière par un signal perturbateur. Paramètres Débit Nombre de nœuds sur le bus Niveau dominant (NL0) Niveau récessif (NL1) Tensions d’alimentation Microcontrôleur et contrôleur CAN intégré Contrôleur CAN Tx Rx Ref Tx Rx Ref TxD TxD RxD Ref RxD Ref Emetteur/récepteur CAN CAN L CAN H Emetteur/récepteur CAN CAN L CAN H CAN H RT RT CAN LS 125 kb/s 2 à 20 CAN H = 4V CAN L = 1V CAN H = 1,75V CAN L = 3,25V 5V Lignes de bus CAN CAN L CAN HS 125 kb/s à 1 Mb/s 2 à 30 CAN H = 3,5 V CAN L = 1,5 V CAN H = 2,5 V CAN L = 2,5 V 5V 3 – TRAMES CAN 3.1 – Stuffing La technique du Bit Stuffing impose au transmetteur ……………………………………………………………………………… ……………………………… lorsqu’il détecte ………………………………………………dans les valeurs à transmettre. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 3.2 – Informations sur le bus Le concept de communication du bus CAN est celui de la …………………………………………………………… (…………………………………). Il existe 4 types de trames circulant sur le bus CAN : ……………………………………… (data frame) ; ………………… ……………… (remote frame) émise par un nœud désirant recevoir une trame de données ; ……………… ……………………………… (overload frame) indiquant qu'une station est surchargée ; ……………………………… (error frame) transmise lors de la détection d'une erreur. Le bus CAN Page n°2/3 Lycée Eugène IONESCO TSTI2D - SIN 3.3 – Trame de données (data frame) La trame de données standard CAN 2.0A (la plus utilisée) se décompose en 7 champs : − ……………………………………………… (………………………………) : Start Of Frame (SOF) ; − ……………………………………………… (………………) : arbitration field ; − ……………………………………………… (………………) : control field ; − ……………………………………………… (………………………) : data field ; − ……………………………………………… (………………) : CRC sequence ; − ……………………………………………… (………………) : ACKnowledgement field ; − ……………………………………………… (………………) : End Of Frame (EOF). On trouve ensuite une 8ème zone dite espace ……………………………… (interframe) qui appartient à la trame. Trame de données Début de trame Champ de données Champ de CRC Champ d'arbitrage Champ de commande IDLE 1 12 6 0à Champ de ACK Fin de trame intertrame 64 16 2 7 ≥3 IDLE Trame de données Les différents champs d’une trame de donnée Ce champ est constitué des …………………………………………… ainsi que du bit ……… (Remote Transmission Request) c’est-à-dire 12 bits. L'identificateur a la forme suivante : Arbitrage ………………………………………………………………………………. Pour une trame de données, le bit RTR doit être ………………………. Ce champ est constitué de 6 bits. Les bits R0 et R1 sont les bits de réserves (dominants en trame CAN 2.0A) pour de futures évolutions. Les ……………………………… du champ de Commande commande sont les bits ……… (Data Length Code) indiquent le ……………………………………… qui seront contenus dans le champ de données Le champ de données contient les données utiles ………………………………………………. Il Données peut être composé de 0 à 8 octets. Dans chaque octet, le ……… est transmis en premier. Le champ de CRC est composé d'une séquence de 15 bits suivi du CRC Delimiter (1 bit CRC récessif). La séquence de CRC (Cyclic Redundancy Code) permet de ……………………………… ………………………………………. Ce champ est composé de 2 bits, l'ACK Slot et le ACK Delimiter (1 bit récessif) : lors de la transmission d'un message par un nœud, le bit ACK Slot est un ………………………………et Acquitement lors de l'acquittement, par un nœud, de la réception correcte d'un message, le bit ACK Slot est un ………………………………. La trame de donnée se termine par une ………………………………………………………. Ce champ Fin de trame possède une structure fixe. Le bus CAN Page n°3/3
© Copyright 2026 Paperzz