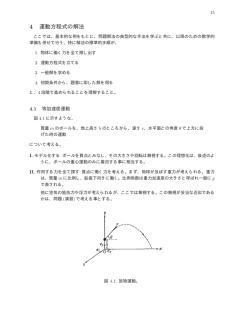
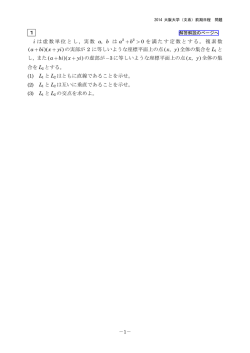
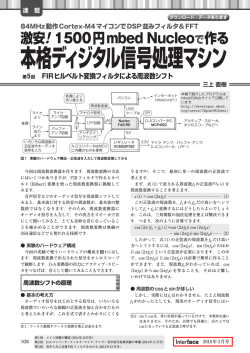
専門基礎力学演習(ニュートン力学編) 第9講 まわる -剛体の回転運動ー 1. 質点の回転運動 第3講では質点の回転運動を x-y 座標系(デカル ト座標系)で表現したときの各成分について考察し たが,ここでは回転方向の変位によって表示する 極座標系で回転の運動方程式をたててみることに する.いま,質点に 重さのない長さ l のヒモが 中心点 O と繋がれているときの, O 点周りの回 転運動について考えることにする.とりあえず, 図-9.1 質点の回転運動 この質点は一定の軌道上を回転するものとすれば, 時々刻々と変化している質点の位置を表すには,デカルト座標系を使うよりは,どこか基準となる ところに中心点 O から線を引いて,そこからの角度θを採用したほうが便利である.この場合,角 度が変位に相当することになるので,それに対応して,以下のように,角速度,角加速度を定義す れば,回転方向の運動方程式を立てることができる. 式(7.7) 角速度:= ω dθ 1 dr v = = dt l dt l 角加速度:= β d 2θ d ω 1 d 2 r a = = = dt 2 dt l dt 2 l 式(9.1) , (9.2) *ここで,円周方向の変位を r と置けば, r = lθ の関係がある(扇方の弧の長さ) 9-1 専門基礎力学演習(ニュートン力学編) ここで,角加速度がゼロで角速度が一定となる場合の等速円運 x 動(等角加速度運動)について考えてみる(図-9.2).この場合, v 注意しなければならないのは「等速」なのは角速度であって,円 周方向の速さは一定であるもののその方向は時々刻々と変化して いるため,平面内 2 方向に成分分解したときには常に円の中心に vx=vcosdθ vy=vsindθ y v ma dθ 向かう方向の速度が変化し,加速度を持つことになるということ である.具体的に図を参照して考察してみると,いま,ヒモの向 きが y 軸の向きと同じになった位置から dt という微少時間の間に 図9.2 等速円運動の中心力 角度 dθだけ回転運動をしたとすれば,dt 経過後の質 点は,x,y それぞれの方向に, vx v= cos dθ = v , v y v= sin dθ vdθ (dθは十分小さいとみなせる = ため)となり,y 方向には速度が vdθだけ変化していることになる.よって,質点には dθ v2 ma mv= mv ω m= mω 2l = = dt l 式(9.3) の中心力が働いているといえる.言いかえれば,おもりはヒモから ma の大きさの力で常に引っ張 られているということになる. 演習 9.1:(公務員試験より) 100N の力に耐えることができる,長さ 0.4mのヒモの先端に質量 1kg の物体をつけて水平面内を回転させ る.このヒモが耐えることができる 1 秒あたりの回転数を求めよ. ma 逆に,ヒモの立場から考えれば,ヒモはおもりから ma の大きさの 力で引っ張られていて,この力が 100N を超えてはいけないことに なるから, = ma m= ω 2l 0.4ω 2 ≤ 100[N] ω≤ f= 100 = 0.4 1000 10 10 [rad/s] = 4 2 1 ω 10 10 [1/s] = = T 2π 4π 9-2 専門基礎力学演習(ニュートン力学編) 2. 回転の運動方程式と慣性モーメント 回転方向の釣合は,力のモーメントが釣り合うことによって決まることを第 2 講で学習した.で は,回転方向の運動方程式はどのように考えればよいのだろう? 運動方程式はその系の全運動量を時間で微分することによって得ることができる.回転方向の運 動量は,力のモーメントが[力×中心点からの距離]で得られるのと同じように,[運動量×中心点か らの距離]として求めることができる.この,回転方向の運動量のことを角運動量といい,力のモ ーメントが作用しない系では角運動量保存則が成立し,力のモーメントが作用する系では,全角運 動量を時間微分すると回転方向の運動方程式が得られる. mv ⋅ l =ml 2ω 式(7.7) 角運動量: 式(9.4) すなわち,角運動量を時間微分したら,回転方向の慣性力になるということなので, d (ml 2ω ) dω 2 = ml 2= ml = β Iβ dt dt 式(7.7) 回転方向の慣性力: 式(9.5) 2 ここで,式(9.5)における I = ml を慣性モーメントといい,並進運動において質量 m が物体の「動 かしにくさ」(だって,モノが重いほど動かしにくいでしょ?)を表しているのと同じように,慣 性モーメント I は物体の「回しにくさ」を表しているといえる.よって,回転方向の運動方程式は, その物体,あるいは系に働く力のモーメントの合計を M とすれば, 式(7.7) 回転方向の運動方程式: Iβ = M ⇒ M − Iβ = 0 式(9.6) 以上をまとめると,並進運動と回転運動の各物理量は以下のように関連付けて考えることもできる. m I 慣性モーメント 質量 mv 運動量 角運動量 Iω 並進運動方程式 F − ma = 回転運動方程式 0 M − Iβ = 0 並進運動 エネルギー K= 回転運動 エネルギー 1 2 mv 2 K= 1 2 Iω 2 演習 9.2: 図のような質量 m,ヒモの長さが l の単振子について回転方向の運動方程式を立てよ. ただし,θ は非常に小さいものとする. 慣性モーメント: I = ml 2 運動方程式: − mg sin θl − I β = 0 θ θ は,非常に小さいので sin θ = θ となり, −mgθ l − I β = 0, − mgθ l − ml β = 0, 2 9-3 d 2θ g + θ= 0 dt 2 l 専門基礎力学演習(ニュートン力学編) 3. 剛体の回転運動 今度は,このように四角い物体を放り投げたときの,物体の運動を考え てみよう.この物体は回転しながら,放物線を描いて飛んでいく.すなわ ち,この場合は, 「回転運動」と「放物運動(並進運動)」の二つの運動が 同時に進行していると考えられる. このときの回転運動は,質量が集中した質点ではなく,質量が h/2 内部に分布している物体(剛体)の回転運動と見て考える必要 dx がある.ここでは,長方形の板の重心周りの慣性モーメントを 計算してみる. y 図-9.3 のようなタテが h,横が b で,単位面積当たりの重量がρ ρ dxdy ⋅ l 2 b/2 x (x,y)の位置にある dx×dy の微小部分の慣性モーメントは, 式(7.7) = Ip 微小部分慣性モーメント: l -b/2 の長方形の板の重心を原点とする座標系を設定する.板の内部, dy 式(9.7) -h/2 これを全面積に亘って積分すれば,この長方形板の重心周り慣 図-9.3 長方形板の慣性モーメント 性モーメントが得られる. 長方形板の重心周り慣性モーメント: 式(7.7) h b 2 2 h b − − 2 2 I =∫ I p dA =ρ ∫ A ∫ b 2 x ( x 2 + y 2 )dxdy =ρ ∫ + xy 2 dy 3 −b h 2 h − 2 3 2 h 2 h − 2 h 2 b b by ρ bh 2 2 b +h + by 2 )dy = ρ y + = 12 12 3 12 h − = ρ∫ ( 3 3 3 ( 2 = ( M 2 b + h2 12 ) 9-4 ) 式(9.8) 専門基礎力学演習(ニュートン力学編) 演習 9.3: 図 9.4 のように,質量 m,長さが l の棒の一端がピンで固定され,ここを中心に回転していとき の運動 方程式より,振動周期を求めよ.ただし,θ は非常に小さいものとする. 支点 ① まず,棒の重心点周りの慣性モーメント I0 を求める. 式(9.8)の通りに考えれば,棒の太さを b としたとき, ( m 2 2 b +l 12 = I0 θ ) 重心 ここで, 「棒」は太さが限りなくゼロに近いと見做せるので, I0 = ml 2 12 図 9.4 ② ところが,回転の中心は「重心」ではなく「支点」なので,支点周りの 慣性モーメント I を求める.線密度をρとすれば,支点から x 離れた位置にある微小 dx 部分の支点周りの慣性モーメントは = I p ρ dx ⋅ x 2 支点 x よって,この棒全体の支点周りの慣性モーメントは I= ∫ ( ρ dx ⋅ x ) l 2 0 dx l ρ x3 ρ l 3 ml 2 2 = ∫ ρ x dx = = = 0 3 3 3 0 l ③ ここで,質量が重心に集中していると考えれば, 図 9.5 2 2 ml 2 l ml I =⋅ m + = 12 3 2 すなわち 任意点まわりの慣性モーメント(x を任意点と剛体重心の間の距離とする) = I mx 2 + I 0 ④ 回転方向の運動方程式を立てる. l −mgθ ⋅ − I β = 0 2 d 2θ 3g = − θ dt 2 2l ←θを二階微分したらθの倍数になる!・・三角関数! = θ A cos T 周期は,= ⇒ mgl ml 2 d 2θ θ+ = 0 2 3 dt 2 3g 3g t + B sin t 2l 2l 2π = 2π ω0 2l 3g 9-5 よって ω0 = 3g の単振動 2l 専門基礎力学演習(ニュートン力学編) 演習 9.4 図 9.6 のように,質量 m(単位面積当たりの質量ρ)で,半径 R の円盤が,円周上の 1 点, A を支点として微小運動する. このときの振動数を求めよ. 支点 A ① まずは,この円盤の重心まわり慣性モーメントを求め る.重心からの距離 r,水平軸との角度θの位置にある 微小部分は,図 9.7 のように,辺の長さがそれぞれ r・ dθ および dr の長方形とみなすことができる.この微 重心 小部分の重心周り慣性モーメントはいくらになるか. I p = ρ ⋅ rdr ⋅ dθ ⋅ r 2 = ρ ⋅ r 3 dr ⋅ dθ 図 9.6 ② 上で求めた微小部分慣性モーメントを 0 ≤ r ≤ R , 0 ≤ θ ≤ 2π の範囲で積分することにより,円盤全体の 重心周り慣性モーメントを求めよ. I0 = ∫ 2π 0 ∫ R 0 ρ r 3drdθ R r4 ρ R 4 2π ρ R 4π d d θ θ = ρ∫ = = 0 4 4 ∫0 2 0 2π = mR 2 2 r・dθ R dr 3)円盤の重心周り慣性モーメントを支点 A まわりの慣 性モーメントに変換せよ. r θ -R R 3mR 2 I= mR + I 0= 2 2 -R 4)支点 A まわりの回転運動をするときの運動方程式を 示し,このときの振動数を求めよ. −mgθ ⋅ R − I β = 0 ⇒ 図 9.7 mgRθ + d 2θ 2 g θ= 0 よって ω0 = + dt 2 3R 3mR 2 d 2θ 0 = 2 dt 2 1 ω0 1 2g = の単振動,周期は, f= = T 2π 2π 3R 9-6 2g 3R 専門基礎力学演習(ニュートン力学編) 演習 9.5 図 9.8 のように,長さ,2l の一様な棒(質量は m)の一端 A を水平で滑らかな床の上に 置き,棒を鉛直とαの角度だけ傾けて静かに手を放した.とき,棒の傾きがθになるときの 角速度と他端 B が床に着くときの角速度および B 端の速度を求めよ.なお慣性力の項は 速度を時間で一階微分した形で表現すること. ① この棒が運動しているときの鉛直方向に作用している力は, l B 重力 mg と反力 R である.重心 G の鉛直下向きの速度を v として, 重心の並進運動を表す運動方程式を導け. mg − R − m l dv = 0 (下向き正) dt y G R ② 重心 G のまわりの慣性モーメント I を求めよ. = I m ml 2 = (2l ) 2 12 3 mg A θ ③ 角速度をωとして,重心 G のまわりの回転運動の 図 9.8 α 運動方程式を導け. Rl sin θ − I ④ dω = 0 (時計回り正) dt 初期状態から角度θとなるまでの重心 G の落下量を y 求めよ. = y l (cos α − cos θ ) ⑤ 並進運動と回転運動が同時に起きることに留意して,初期状態と角度θのときの間における力 学的エネルギー保存則を適用した下の式の右辺はどのようになるか. 1 2 1 2 mgy mv + I ω = 2 2 ⑥ l=3[m],g=10[m/s2], cos α = 4 であるとき,②,④,⑤の結果を踏まえて,棒が水平になっ 5 た時点での角速度と重心の速度を求めよ. ④を時間微分すれば, v= dy dθ = l sin θ ⋅ = l sin θ ⋅ ω dt dt これと②および④を⑤に代入すれば 1 2 2 1 ml 2 2 ml sin θ ⋅ ω 2 + = ⋅ ω mgl (cos α − cos θ ) 2 2 3 よって, ω= 6 g (cos α − cos θ ) l (3sin 2 θ + 1) あとは各物理量を代入すればよい 9-7 専門基礎力学演習(ニュートン力学編) 演習 9.6 図 9.9 のように,半径 R,質量 m の円盤を勾配が 30°の斜面上に置き静かに手を放し たところ, 円盤は斜面との間で滑って空回りすることなく,回転しながら転がり落ちた. ただし,重力加速度を g とする. I ① 円盤と斜面の間の摩擦力を f として,斜面に沿う方向の dω dt m 並進運動の運動方程式を示せ. dv dt f mg dv − f −m = 0 (斜面下方向正) 2 dt mg sin 30° ② 円盤の重心周り慣性モーメントを求めよ. I= mR 2 30° mg cos 30° 2 mg ③ 円盤は角速度ωで回転するものとして,回転方向の運動方程式を示せ. f ⋅R−I ④ 図 9.9 dω = 0 (反時計回り正) dt この円盤が斜面との間で滑って空回りすることなく,回転しながら転がり落ちるためには, v = Rω ,すなわち,並進方向の速度と円盤外周の回転速度が一致していることが条件となる. これを両辺時間微分した式と,①~③の結果を踏まえて、摩擦力 f を求めよ. ⑤ v = Rω の両辺を時刻 t で微分すれば, dv dω =R dt dt これを①に代入すれば, mg dω − f − mR = 0 2 dt ②を③に代入すれば, f− mR d ω = 0 2 dt この2式により, f = mg 6 静止摩擦係数をµとしたとき,µがいくら以上であることが,円盤が空回りすることなく,回転 しながら転がり落ちるための条件となるか. µ ⋅ mg cos 30° > mg 6 ⇒ µ> 1 3 3 9-8
© Copyright 2026 Paperzz