特殊相対性理論のまとめ
千葉 敏
1
光源の速度と光速
19 世紀の後半、光の速さが光源の運動に依存するかどうかが問題となりいろいろな実
験が行われた。有名な実験としてマイケルソン · モーリーの実験がある。彼らは地球自身
の運動を光源の速度として利用して、地上のある方向と、それに垂直な方向への光の伝搬
速度の違いをレーザー光の干渉を用いて測定する方法を考案した。その結果、光の速度は
光源の運動とは無関係であることが確立した。
2
特殊相対性原理
光速が光源の運動に無関係であることを光速度不変の原理、または狭義の特殊相対性原
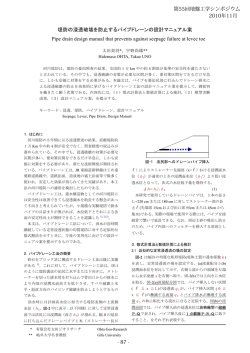
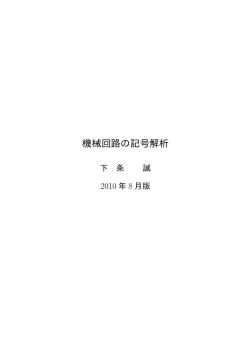
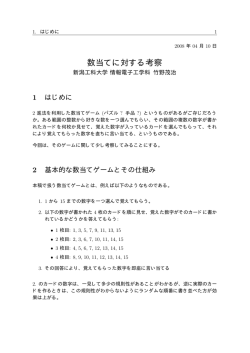
理という。ある座標系を考える。その原点を O とし、x、y 、z 軸を適当に設定する。これ
を O 座標系 (または簡単に O 系) と呼ぶ。次に、原点を O′ とする座標系 (O′ 系) を考え、
その 3 軸 x′ 、y ′ 、z ′ 軸の向きは O 系の軸の向きと同じで、O に対して x 軸方向に速度 v で
走っているものとする。ただし、それぞれの座標系の時間 t = t′ = 0 において両者の原点
は一致していたものとする (図 1 参照)。
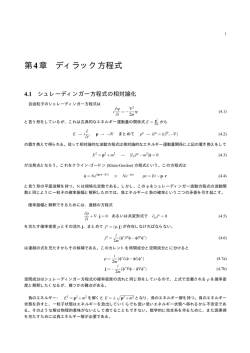
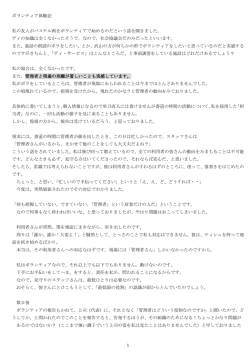
今、O 系の原点に光源を固定して、時刻 t = 0 に光を等方的に放出したとする。光の速
さを c とすると、この系では、時刻 t の時点で光は距離 r = ct の球面上の点に到達してい
ることになる。一方、この球面上の任意の点 P の座標を (x, y, z) とすると、球面の方程式
は r2 = x2 + y 2 + z 2 なので、光の波面を (t, x, y, z) を用いて表すと
(ct)2 − x2 − y 2 − z 2 = 0
(1)
となる (図 2)。一方、狭義の相対性原理により、O′ 系においても光は等方的に速度 c で伝
搬することが結論されるので、O′ 系の原点にいる人から見れば、時刻 t′ において光が到
達する球面は、方程式
(ct′ )2 − x′2 − y ′2 − z ′2 = 0
(2)
と表すことができる。これらの 2 式をまとめると、光の運動に関して、
(ct)2 − x2 − y 2 − z 2 = (ct′ )2 − x′2 − y ′2 − z ′2 = 0
(3)
が結論される。これが光速度不変の原理の数学的表現である。
この二つの座標系は、O 系から見れば O′ 系は x 軸の正の方向に速度 v で移動している
が、O′ 系から見れば O 系は x 軸の負の方向に同じ速度 v で移動していることになる。狭
義の相対性原理は宇宙に絶対的に静止した座標系が無いということを示していて、そのた
め O 系と O′ 系のどちらも基本的な座標系であるということはできない。例えば上の例で
は光源を O′ に固定しても同じ結論が得られる。アインシュタインはこの結果を一般化し
て、光の運動に限らず、物理法則はお互いに一定の速度で移動する任意の座標系の間では
1
䊨䊷䊧䊮䉿ᄌ឵
y
y’
╬ㅦㆇേ
v
t
P (x, y, z, t)
(x’, y’, z’, t’)t
O’
O
O’ᐳᮡ♽䋺 O♽䈮ኻ䈚䈩ㅦᐲv䈪xゲ
ᣇะ䈮⒖േ䈜䉎ᐳᮡ♽ (x’,y’,z’,t’)t
x, x’
z
Oᐳᮡ♽䋺 䈮࿕ቯ䈚䈢ᐳᮡ♽
(x,y,z,t)t
z’
図 1: 時刻 t = 0 で原点が一致していた二つの座標系の関係
y
P
(x, y, z, t)
r=ct
O
x
z
図 2: 時刻 t = 0 で光源から放出された光の時刻 t における波面
2
y
╬ㅦㆇേ
y’
v
O’
O
z’
y, z, t)t
(x’, y’, z’, t’)t
x, x’
vt
z
P (x,
x'
x=x'+vt
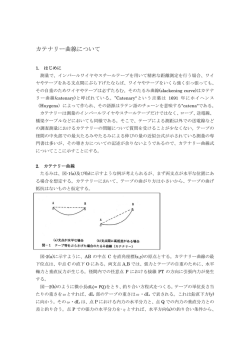
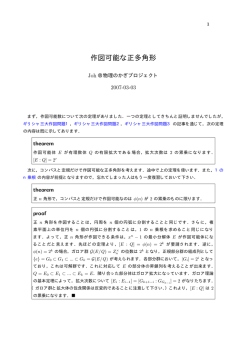
図 3: ガリレイ変換
同じ形に書けるはずだという仮定をおいて、時刻 t = t′ = 0 で原点が一致していた二つの
座標系で起こる事象の間に
(ct)2 − x2 − y 2 − z 2 = (ct′ )2 − x′2 − y ′2 − z ′2
(4)
の関係が常に成り立つもの考えた。これが広義の特殊相対性原理で、これに基づいて特殊
相対性理論が構築された。なお、お互いに一定の速度で運動している座標系を慣性座標系
と言う。特殊相対性原理は慣性座標系の間で成り立つ関係である。
3
4 次元時空における点の意味
今後、通常の x、y 、z 軸上の点で表される通常の位置の他に、ct を軸とする第 4 の軸
を座標軸に加えた 4 次元の空間を考える。この中の各点は、
“ どこで ”だけではなく、”い
つ ”何が起きたか、あるいは”いつ、どこに何が存在するか ”を表す点である。今後、こ
のような 4 次元時空を表す二つの座標系を考え、一方の座標系 O′ が他方の座標系 O に対
して x 軸の正の方向に速度 v で動いているものとする。
4
二つの座標系の間での変換法則
(4) 式を満たす変換法則を求める。y 軸、z 軸は座標系の運動方向に垂直なので、この
方向の座標成分には何の変化も無い。一方、x 軸方向には O′ 系は O 系に対して速度 v で
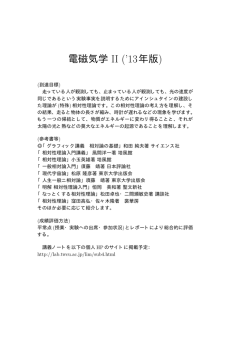
走っているので変換が必要である。ニュートン力学で用いられるガリレイ変換は
x′ = x − vt
t′ = t
(5)
(6)
である(図 3)。これが特殊相対性原理 (4) 式を満たすかどうかを確認すると、
(ct′ )2 − x′2 = (ct)2 − (x − vt)2 = (ct)2 − x2 + 2xvt − (vt)2 ̸= (ct)2 − x2
これは、v = 0 の場合を除いて特殊相対性原理を満たしていない。
3
(7)
そこで、新たな変換法則を求めることが必要になるが、ガリレイ変換を用いるニュー
トンの法則は我々が日常経験する物理法則を良く記述できることがわかっている。従って
v → 0 の時にガリレイ変換に一致することが必要条件であると考える。そこで、
cosh2 θ − sinh2 θ = 1
(8)
ct′ = −ct cosh θ + x sinh θ
x′ = ct sinh θ − x cosh θ
y′ = y
(9)
(10)
(11)
z′ = z
(12)
を利用して、
と置くと、
(ct′ )2 − x′2 − y ′2 − z ′2 = (cosh2 θ − sinh2 θ)(ct)2 − (cosh2 θ − sinh2 θ)x2 − y 2 − z 2
= (ct)2 − x2 − y 2 − z 2
(13)
となり特殊相対性原理が自動的に満たされる。O′ 系の原点 (x′ = 0, y ′ = 0, z ′ = 0) は、時
間 t の時点で O 系の (x = vt, y = 0, z = 0) にあるので、
0 = ct sinh θ − vt cosh θ
これより
tanh θ =
(14)
v
c
(15)
という条件が得られる。これを解くために
v
c
α ≡ cosh θ
√
sinh θ = ± α2 − 1
β ≡
(16)
(17)
(18)
と置くと、(15) 式は
√
α2 − 1
±
=β
α
と書き直される。これを解いて α(= cosh θ) と sinh θ を求める:
(19)
α2 − 1
= β2
2
α
(1 − β 2 )α2 = 1
(20)
(21)
1
α = cosh θ = ± √
1 − β2
√
β
sinh θ = ± α2 − 1 = ± √
1 − β2
従って
(
x
βct
− ±√
x′ = ct sinh θ − x cosh θ = ± √
2
1−β
1 − β2
4
(22)
(23)
)
(24)
であるが、v → 0(β → 0) の極限でガリレイ変換 x′ = x − vt と一致するために、符号とし
ては
1
cosh θ = − √
1 − β2
β
sinh θ = − √
1 − β2
(25)
(26)
を選択する。これにより
ct − βx
ct′ = −ct cosh θ + x sinh θ = √
1 − β2
−βct + x
x′ = ct sinh θ − x cosh θ = √
1 − β2
y′ = y
z′ = z
(27)
(28)
(29)
(30)
となる。これをローレンツ変換と言う。
この逆変換は v → −v(β → −β) と置くことによって
ct + βx
ct = √
1 − β2
βct + x
x = √
1 − β2
y = y′
z = z′
これらの変換は
1
γ≡√
1 − β2
(31)
(32)
(33)
(34)
(35)
を定義するとさらに簡単に書くことができる:
′
ct = γ(ct − βx)
x′ = γ(−βct + x)
y′ = y
z′ = z
ct = γ(ct′ + βx′ )
x = γ(βct′ + x′ )
y = y′
z = z′
(36)
(37)
βc = v であることに注意せよ。
4.1
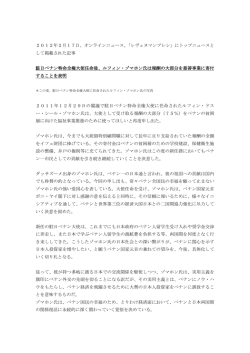
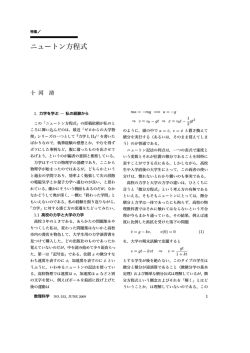
ローレンツ収縮
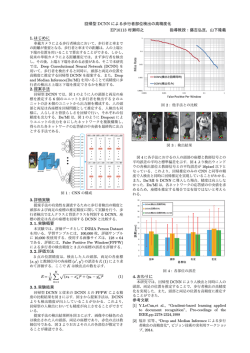
我々が O 系の原点にいるものとして、それに対して x 軸方向に v の速度で移動する長
さ L0 の物差しを考える。また、この物差しと一緒に動く O′ 系を考える。つまり O′ 系も、
5
䊨䊷䊧䊮䉿❗䋺േ䈇䈩䈇䉎䉅䈱䈱㐳䈘䈲
y’
y
╬ㅦㆇേ
v
L0=x'2-x'1
䈱䈧䈇䈢♽䈲㵭䈱䈧
ኻ䈚䈩䌸ゲᣇะ䈮ㅦ
䈇䉎䈫䈜䉎
O’
O
x'1
x'2
x, x’
z’
z
図 4: ローレンツ収縮
我々に対して O′ 系において x 軸方向に v の速度で移動しており、物差しは O′ 系において
は静止している。従って O′ 系における物差しの長さ L0 が物差しの本来の長さである。
O′ 系において、物差しをの左端を原点に、右端を x′ = L0 の点に一致するように置い
て、この二つの座標が我々の座標系で見るとどうなるかを考える。このためにローレンツ
変換
x′ = γ(−βct + x)
(38)
を適用する。O 系にいる我々が物差しの長さを測るためには、O 系でのある時刻 t におい
て、物差しの左端 xL(O′ 系では x′ = x′1 )と物差しの右端 xR(x′ = x′2 = x′1 + L0 に対応)
の点の座標を計れば、物差しの長さはその差 L = xR − xL なので
左端:x′1 = γ(−βct + xL )
右端:x′1
これより
+ L0 = γ(−βct + xR )
v
L0 √
= 1 − β 2 · L0 , β ≡
L = xR − xL =
γ
c
(39)
(40)
(41)
√
となる。 1 − β 2 ≤ 1 なので、L ≤ L0 、つまり、我々から見た物差しの長さ L は、本来
の長さ L0 より小さく見える。これがローレンツ収縮である。すなわち、走っている物体
の運動方向の長さは縮んで見える。収縮の度合いは速度 v が光速に近ければ近いほど大き
い。v → c の極限で L → 0 である。
4.2
動いている物体の寿命の延び
次に、上と同じ状況で、O′ の原点に時刻 t′ = 0 で粒子が発生して、時刻 t′ = τ ′ で消滅し
たとする。τ ′ は粒子が静止している系での寿命であるので、粒子本来の寿命である。この
寿命を O 系にいる我々が観測したらどのようになるだろうか?我々に対して粒子は速度 v
で走っている。つまり、速度 v で走る物体の寿命はどのように変化して見えるだろうか?
このために、ローレンツ変換
ct = γ(ct′ + βx′ )
(42)
6
ᤨ㑆ㆃᑧ䋺േ䈇䈩䈇䉎䉅䈱䈱ኼ䈲ᑧ
y
y’
╬ㅦㆇേ
v
O’
O
z
䈱䈧䈇䈢♽䈲㵭䈱䈧
ኻ䈚䈩䌸ゲᣇะ䈮ㅦᐲ
䈇䉎䈫䈜䉎
x, x’
z’
図 5: 動いている粒子の時間の延び
を用いる。粒子は O′ 系の原点 x′ = 0 で時刻 t′ = 0 に生まれ、時刻 t′ = τ ′ で消滅したので
あるから、それに対応する O 系での時刻は、
cti = 0
ctf = γcτ ′
(43)
(44)
τ′
τ = tf − ti = γτ ′ = √
≥ τ′
1 − β2
(45)
従って O 系から見た粒子の寿命は
である。この場合、O 系からみた粒子の寿命は、本来の寿命 τ ′ よりも長く見える。これ
が寿命の伸びと呼ばれる現象である。言い換えると、動いている物体の時計は遅く進むよ
うに見える。
4.3
速度の変観則
O′ 系において x′ 軸に方向に速度 u’ で動いている粒子があるとする。この粒子の速度を
O 系で見るとどうなるかを調べる。まず、u′ の意味は、粒子の 4 次元座標を (ct′ , x′ , y ′ , z ′ )
とすると、
dx′
(46)
u′ = ′
dt
である。これとローレンツ変換
ct = γ(ct′ + βx′ )
x = γ(βct′ + x′ )
を用いると
u=
dx
γ(βcdt′ + dx′ )
βc + u′
=c
=
c
dt
γ(cdt′ + βdx′ )
c + βu′
(47)
(48)
(49)
これが速度の変観則である。いくつかの場合にどのような結果になるかを見てみる。
1. β = 0 の時、u = u′
7
2. v = c(β = 1) の時、u = c(光速で走る物体から放出される粒子の速度はつねに光速
に等しい)
3. v = c、u′ = c の時も u = c(光速で走る物体から運動方向に光速で粒子が発射され
た場合でもその粒子の速度は光速)
4. v = c、u′ = −c の時、
c−c
u=c
=c
(50)
c−c
すなわち、光速で走る物体から運動方向と逆に光速で粒子が発射されても、その粒
子は光速で走っているように見える
5. u′ = −c の場合、
βc − c
βc − c
= −c
= −c
(51)
u=c
c − βc
βc − c
有限の速度で走る粒子から後ろ向きに光速で粒子が発射された場合は、その粒子の
速度は −c である。
5
4 元ベクトル
上で得られたローレンツ変換は、4 つの成分を持つベクトルを定義すると簡単に書くこ
とができる。ベクトル x、x′ を
行列 Λ(v) を
−βγ
γ
0
0
γ
−βγ
Λ(v) =
0
0
とすると、ローレンツ変換は
と書くことができる。ただし
{
ct′
′
x
x′ =
′
y
z′
ct
x
x=
,
y
z
0
0
1
0
0
0
0
1
x′ = Λ(v)x
x = Λ(−v)x′
γ
βγ
Λ(−v) =
0
0
βγ
γ
0
0
(52)
(53)
(54)
0
0
1
0
0
0
0
1
である(v → −v は β → −β を意味する)。
これより、
x′ = Λ(v)x = Λ(v)Λ(−v)x′
(55)
(56)
となるので、
Λ(v)Λ(−v) = 1(単位行列)
(57)
となり、Λ(v) と Λ(−v) はお互いに逆行列であることが言える。また、両方とも対称行列
(Λ(v)t = Λ(v) 等)であることに注意せよ。t は転置行列を表す (Atij = Aji )。
8
5.1
問題
Λ(v) と Λ(−v) がお互いに逆行列であることを示せ(ヒント:β = vc 、γ = √ 1
1−β 2
6
)。
反変ベクトルと共変ベクトル
(52) 式のように 4 個の成分を持ち、おたがいに等速度で移動する座標系の間でローレン
ツ変換を受けるベクトルを反変ベクトルと言う。反変ベクトルの成分は 0 から始まる上添
え字を用いて表される。
0
ct
x
1
x
x
(58)
x=
2 =
y
x
z
x3
(54) 式で表される変換は、成分で書くと
x′α =
3
∑
Λ(v)α β xβ
(59)
β=0
のように書ける (α = 0 ∼ 3 のどれか)。ここで Λ(v)α β は行列 Λ(v) の α 行 β 列要素を表
す。今後、ギリシャ文字で表した添え字は 0 から 3 の値を持つものとし、同じ添え字(今
の場合 β) が一つの項に 2 回現れたときは自動的に 0 から 3 までの和を取ることにすると、
この式は簡単に
x′α = Λ(v)α β xβ
(60)
と書くことができる。行列 Λ は対称行列なので Λ(v)α β = Λ(v)β α である。
次に、反変ベクトルの第 1 成分から第 3 成分の符号を変えたベクトルを共変ベクトルと
言って、x̃ と書き、また成分を表すのに下添え字を用いる:
x0
x0
ct
1
x1
−x
−x
x̃ = =
2 =
x2
−x
−y
x3
−x3
−z
(61)
共変ベクトルのローレンツ変換は
ct′ = γ(ct − βx) = γ(ct + β(−x))
−x′ = −γ(−βct + x) = γ(βct + (−x))
−y ′ = −y
−z ′ = −z
なので、
{
x̃′ = Λ(−v)x̃
x̃ = Λ(v)x̃′
(62)
(63)
となる。すなわち、共変ベクトルのローレンツ変換は、反変ベクトルのローレンツ変換
(54) 式の逆変換を用いて行われる。
9
相対性原理は (ct)2 − x2 − y 2 − z 2 がローレンツ変換によって変化しないという条件であ
るが、これは反変ベクトルと共変ベクトルを用いると、簡単に
t
x̃t · x = x̃′ · x′
(64)
と書くことができる。具体的に書くと
ct
x
x̃t · x = x0 x0 + x1 x1 + x2 x2 + x3 x3 = (ct, −x, −y, −z)
y
z
2
2
2
2
′ 2
′2
′2
′2
= (ct) − x − y − z = (ct ) − x − y − z
t
= x̃′ · x′
(65)
(66)
(67)
である。反変ベクトルと共変ベクトルの成分同士のこのような積をスカラー積と言う。ス
カラー積がこのように定義される 4 次元時空をミンコフスキー空間(ミンコフスキー時
空)と呼ぶ。最初に相対性原理として仮定した通り、これはローレンツ変換によって変化
しない。これは反変ベクトルと共変ベクトルのローレンツ変換が逆変換であることからも
明らかである。
x̃′ = Λ(−v)x̃
x′ = Λ(v)x
(68)
(69)
t
→ x̃′ · x′ = x̃t Λ(−v)t · Λ(v)x = x̃t Λ(−v) · Λ(v)x = x̃ · x
(70)
Λ(−v) と Λ(v) は逆行列の関係に有り、Λ(v)、Λ(−v) が対称行列であることを思い出す
こと。
これらの関係は一般の反変ベクトルと共変ベクトルのスカラー積においても成立する。’
がついた量をローレンツ変換後の量とすると、相対性原理は
Ã′ · B ′ = Ã · B
(71)
と書くことができる。これを元にして、ある 4 成分のベクトルが共変ベクトル、または反
変ベクトルであるかを判定することができる。つまり、あるベクトル B が反変ベクトル
であることが分かっていて、それとある 4 成分ベクトル Ã のスカラー積がローレンツ変
換をしても変化しないことが分かれば、4 成分ベクトル Ã が共変ベクトルであることが言
える。逆に (71) 式が成り立つ時、Ã が共変ベクトルであることが分かっていれば、4 成分
ベクトル B が反変ベクトルであることが言える。従って、これらは座標系を変換すると
きにそれぞれに適用されるローレンツ変換 (54) 式または (63) 式を受ける。反変ベクトル
と共変ベクトルを総称して 4 元ベクトルと言う。また、スカラー積のようにローレンツ変
換をしても変化しない量をローレンツ不変量と言う。スカラー積の場合はローレンツスカ
ラーとも言う。
これまでに現れた反変ベクトルと共変ベクトルは
ct
x0
1
x
x
反変ベクトル:x =
2 =
y
x
3
x
z
10
(72)
x0
ct
x1
−x
共変ベクトル:x̃ = =
x2
−y
x3
−z
(73)
の 2 種類である。
7
4 元速度ベクトル
ローレンツ不変量 (ct)2 − x2 − y 2 − z 2 を (cτ )2 と置く。すなわち
(cτ )2 = (ct)2 − x2 − y 2 − z 2
(74)
時刻 t = 0 で原点から走り出した粒子が時刻 dt で (dx, dy, dz) まで進んだとすると、この
時空の微少区間で
(cdτ )2 = (cdt)2 − dx2 − dy 2 − dz 2
(75)
である。dτ はローレンツ不変量である。この両辺を dτ 2 で割ると
(
dt
c = c
dτ
(
)2
dx
−
dτ
2
)2
(
dy
−
dτ
)2
(
dz
−
dτ
)2
(76)
となるが、これは反変ベクトル u と共変ベクトル ũ
dt
c dτ
u≡
dx
dτ
dy
dτ
dz
dτ
dt
c dτ
dx
− dτ
ũ ≡
dy
−
dτ
dz
− dτ
,
(77)
のスカラー積 ũ · u = c2 である。これらを 4 元速度ベクトルと言う。それぞれの成分を
u = {uα }、ũ = {uα } のように書く。
(75) 式の両辺の平方根を取ると
√
(cdt)2 − dx2 − dy 2 − dz 2
cdτ =
(78)
さらに dt で割ると
dτ
c
=
dt
これより、
また、
v
u
u
t
(
dx
c2 −
dt
)2
(
dz
−
dt
)2
(
dz
−
dt
)2
=
√
c2 − v 2
(79)
1
dt
1
=√
=√
=γ
(
)
2
dτ
1 − β2
v
1− c
(80)
dt d
d
d
=
=γ
dτ
dτ dt
dt
(81)
11
これを用いると
c
c
dx
dt
vx
u≡γ
dy = γ ,
dt
vy
dz
vz
dt
c
c
dx
−vx
− dt
ũ ≡ γ dy = γ
−vy
− dt
− dz
−vz
dt
(82)
である。ただし vi (i = x, y, z) は通常の速度ベクトルの成分を表す。
8
4 元運動量ベクトル
4 元速度ベクトル (反変ベクトル) に粒子の静止質量 m0 をかけたベクトルを考える。
dt
c
c dτ
p0
dx
dx
1
dt
dτ
p
p ≡
2 = m0 dy = γm0 dy ,
dt
dτ
p
dz
dz
p3
dt
dτdt
p0
c
c dτ
dx
dx
p1
−
−
= m0 dτ = γm0 dt
p̃ ≡
dy
dy
p2
− dt
− dτ
dz
− dτ
− dz
p3
dt
(83)
(84)
反変ベクトル × 定数は明らかに反変ベクトルなので、p は反変ベクトル、p̃ は共変ベクト
ルである。第 1 ∼ 3 成分は v → 0 の極限 (γ → 1) でニュートン力学の運動量と一致するの
で、これを 4 元運動量ベクトルと呼ぶ。
p̃t · p はローレンツ不変量である。実際に計算してみると
p̃t · p = (p0 )2 − (p1 )2 − (p2 )2 − (p3 )2
(
= m20 γ 2 c2 −
dx
dt
(
)2
−
dy
dt
(
)2
−
)2
dz
dt
= m20 γ 2 (c2 − v 2 ) = m20 c2 = 定数
(85)
(86)
(87)
である。これより
である。また、
(p0 c)2 = (m0 c2 )2 + (p1 c)2 + (p2 c)2 + (p3 c)2
(88)
]
∂ [ 0 2
(p ) − (p1 )2 − (p2 )2 − (p3 )2 = 0
∂τ
(89)
これより
p0
となるが、以前に導いた関係
dp1
dp2
dp3
dp0
= p1
+ p2
+ p3
dτ
dτ
dτ
dτ
d
d
=γ
dτ
dt
12
(90)
(91)
及び p の各成分を具体的に代入すると、
[
dp0
dx dp1 dy dp2 dz dp3
γ m0 c
= γ 2 m0
+
+
dt
dt dt
dt dt
dt dt
]
2
(92)
この両辺に dt を掛け、γ 2 m0 で割ると
cdp0 =
dp1
dp2
dp3
˙
dx +
dy +
dz = P⃗ · d⃗r
dt
dt
dt
(93)
⃗ はニュートン力学の運動量ベクトルである。この右辺は運動量の時間微分(=
ここで P
力)× 移動距離という意味を持っており、これは仕事量の定義である。すなわち、この右
辺はエネルギーという意味を持っている。従って左辺の量 cdp0 もエネルギーの次元を持っ
た量であり、その積分 p0 c = γm0 c2 もエネルギーの意味を持つ。そこで p0 c = E と置く。
m = γm0 と定義すると、これより
E = mc2
(94)
が導かれる。また (88) 式を書き直すと
E 2 = (m0 c2 )2 + (p1 c)2 + (p2 c)2 + (p3 c)2 = (m0 c2 )2 + (pc)2
(95)
となる。ここで p = (p1 , p2 , p3 ) は運動量ベクトルの 1,2,3 成分を成分とするベクトルであ
る。さらに、
p̃t · p = (p0 )2 − (p1 )2 − (p2 )2 − (p3 )2 = m20 c2
(96)
はローレンツスカラーであるが、粒子が静止している系では p1 = p2 = p3 = 0 である。こ
の系では
p0 c = m0 c2
(97)
なので、m0 c2 もエネルギーの意味を持つ。これを静止質量エネルギーと言う。
m = γm0 なので、m を速度 v で走る粒子の質量と考えると、v が大きくなるにつれて
粒子の質量が増大する。
9
4 元力
ニュートン力学では、粒子の運動量を P (P 1 , P 2 , P 3 ) として、力の各成分 F i が
Fi =
d2 xi
dP i
= m0 2 ,
dt
dt
(i = 1...3)
(98)
の様に定義されている。相対論でも同様に定義するが、違いは質量が速度の関数である
ため、
dP i
d
Fi =
= m0 γv
(99)
dt
dt
となることである。
また、相対論では、4 元力を
dpα
dpα
=γ
f =
dτ
dt
α
13
(100)
と定義する (p は 4 元運動量ベクトル)。ただし (81) 式を用いた。τ はローレンツスカラー
なので f は反変ベクトルである。これらは、
f α = m0
d2 xα
d dxα
d γxα
=
m
γ
=
m
γ
0
0
dτ 2
dt dτ
dt dt
(101)
のようにも書ける。v → 0 の極限で τ → t なので、f i → F i となる。また
f0 =
dγm0 c
1 dE
→
dτ
c dt
(102)
もしエネルギーが保存される問題であれば、f 0 = 0 となる。
10
微係数のベクトル
反変ベクトル
x0
ct
1
x
x
x=
2 =
x
y
3
x
z
(103)
∂x′β ∂
∂
=
∂xα
∂xα ∂x′β
(104)
x′ = Λ(v)x
(105)
の各成分による微係数を考える。
ここで、ローレンツ変換
を思い出すと、
∂x′β
= Λ(v)β α = Λ(v)α β
(106)
α
∂x
ただし、Λ が対称であることと、上添え字と下添え字を同時に変えても良いことを用いた
(先に書いてある添え字が行を表し、後の添え字が列を表すと約束する)。従って、
∂
∂
= Λ(v)α β ′β
α
∂x
∂x
これより
A=
というベクトルは、
∂
∂x0
∂
∂x1
∂
∂x2
∂
∂x3
(107)
(108)
A = Λ(v)A′
(109)
のようにローレンツ変換される。この逆変換は
A′ = Λ(−v)A
14
(110)
である。これらの変換法則は共変ベクトルの変換則と同じであるので、A、A′ は共変ベクト
ルであると結論することができる。共変ベクトルは下添え字を用いて表すので、∂α ≡ ∂x∂α
のように略記すると
∂
1∂
∂0
∂x0
c ∂t
∂
∂
∂1
∂x
∂x1
∂˜ =
(111)
= ∂ = ∂
∂2
∂x2
∂y
∂
∂
∂3
∂x3
∂z
という共変ベクトルである。これに対応する反変ベクトル ∂ は、第 1∼3 成分の符号を変
えることによって得られる。
∂
∂0
∂x0
1
− ∂
∂
= ∂x1
∂=
2
∂
∂
− ∂x2
∂3
− ∂x∂ 3
=
1 ∂
c ∂t
∂
− ∂x
∂
− ∂y
∂
− ∂z
=
∂
∂x0
∂
∂x1
∂
∂x2
∂
∂x3
(112)
∂˜ と ∂ のスカラー積は
(
˜t
∂ ·∂ =
=
∂
∂
∂
∂
,
,
,
∂x0 ∂x1 ∂x2 ∂x3
)
·
∂
∂x0
∂
− ∂x
1
∂
−
∂x2
− ∂x∂ 3
2
1 ∂2
∂2
∂2
∂
−
−
− 2
2
2
2
2
c ∂t
∂x
∂y
∂z
(113)
(114)
であるが、これはダランベリアンと呼ばれる演算子である。これより、ダランベリアンが
ローレンツ変換によって不変であることが証明された。
11
テンソル
二つの 4 元反変ベクトル A、B の要素を掛け合わせた 16 個の要素を有する 4×4 次元の
行列 T を考える:
T αβ = Aα B β
(115)
これを O′ 系の座標で表した量を T ′ とすると、ローレンツ変換によって
T ′αβ ≡ A′α B ′β = Λ(v)α µ Aµ Λ(v)β ν B ν
= Λ(v)α µ Λ(v)β ν T µν
(116)
(117)
のように変換される。このように、ローレンツ変換によって、行列 Λ(v) が 2 回かかる変
換を受ける量を 2 階の反変テンソルと言う。同様に 3 階、4 階... のテンソルも定義される。
二つの共変ベクトルの積は、同様に
′
= Λ(−v)α µ Λ(−v)β ν Cµν
Cαβ
(118)
のように変換される。これが 2 階の共変テンソルである。また、反変ベクトルと共変ベク
トルの積から混合テンソルが定義される。
15
12
電磁テンソル
⃗ を用いて 4 成分の量
電磁場を表すスカラーポテンシャル ϕ とベクトルポテンシャル A
ϕ
c
Ax
A = {A } =
Ay
α
(119)
Az
を考えると、マクスウエルの方程式の一つ
⃗ ·A
⃗ + 1 ∂ϕ = 0
∇
c2 ∂t
(120)
∂˜ · A = 0
(121)
は、
と書くことができる。電磁気学の法則は光を含めて成り立つので、この方程式も慣性系に
よらず成り立つものと考えることができる。従ってこれはスカラー積であり、4 成分の量
A は反変ベクトルである。今のところこれは仮定であるが、実験的にも正しいことが知ら
れている。従って事実として認めることにする。
すると、以下のような量
F αβ = ∂ α Aβ − ∂ β Aα
(122)
は 2 階の反変テンソルである。このテンソルは添え字の入れ替えに対して反対称、かつ対
角要素はゼロである。すなわち
F αβ = −F βα
F αα = 0
(123)
(124)
従って、上半分(または下半分)の 6 個の要素を計算すれば全ての要素を求めることがで
きる。そのために電磁気学の方程式
⃗ = ∇
⃗ ×A
⃗
B
(125)
⃗ = −∇
⃗ ·ϕ− ∂ A
⃗
E
∂t
(126)
⃗ 、E)
⃗ はそれぞれ磁場、電場である。
を書いておく (B
これらの定義を用いて F αβ を実際に計算すると
(
F
01
= ∂ A −∂ A
0
1
1
0
F 02 = ∂ 0 A2 − ∂ 2 A0
F 03 = ∂ 0 A3 − ∂ 3 A0
F 12 = ∂ 1 A2 − ∂ 2 A1
F 13 = ∂ 1 A3 − ∂ 3 A1
F 22 = ∂ 2 A3 − ∂ 3 A2
)
(
)
∂
∂ ϕ
1 ∂ϕ ∂Ax
Ex
Ax − −
=
+
=−
=
∂(ct)
∂x c
c ∂x
∂t
c
(
)
(
)
∂
∂ ϕ
1 ∂ϕ ∂Ay
Ey
=
Ay − −
=
+
=−
∂(ct)
∂y c
c ∂y
∂t
c
(
)
(
)
∂
∂ ϕ
1 ∂ϕ ∂Az
Ez
=
Az − −
=
+
=−
∂(ct)
∂z c
c ∂z
∂t
c
)
(
(
)
∂
∂
⃗ × A = −Bz
= − Ay − − Ax = − ∇
z
∂x
∂y
)
(
(
)
∂
∂
⃗ × A = By
= − Az − − Ax = ∇
y
∂x
∂z
)
(
(
)
∂
∂
⃗ × A = −Bx
= − Az − − Ay = − ∇
x
∂y
∂z
16
(127)
(128)
(129)
(130)
(131)
(132)
後は反対称性を用いれば全ての要素が求まる。これらをまとめると
F =
0
Ex
c
Ey
c
Ez
c
− Ecx
0
Bz
−By
これが電磁テンソルである。
17
− Ecy
−Bz
0
Bx
− Ecz
By
−Bx
0
(133)
© Copyright 2026 Paperzz