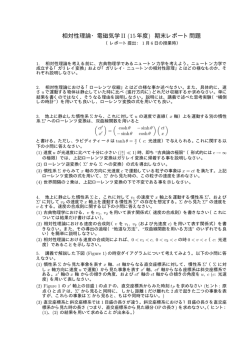
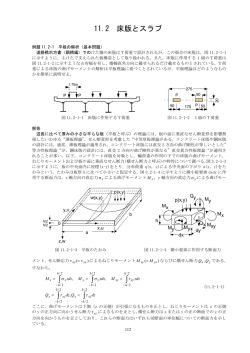
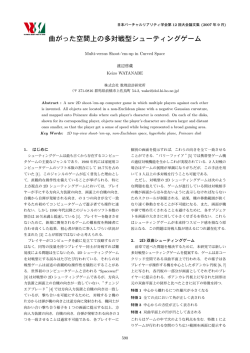
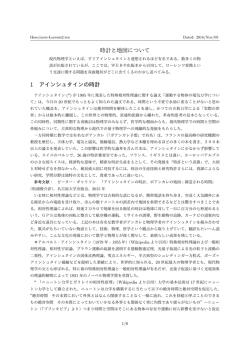
電磁気学 II (’13 年版) (到達目標) 走っている人が観測しても、止まっている人が観測しても、光の速度が 同じであるという実験事実を説明するためにアインシュタインの建設し た理論が (特殊) 相対性理論です。この相対性理論の考え方を理解し、そ の結果、走ると物体の長さが縮み、時計が遅れるなどの現象を学びます。 もう一つの帰結として、物質がエネルギーに変わリ得ることと、それが 太陽の光と熱などの莫大なエネルギーの起源であることを理解します。 (参考書等) ◎「グラフィック講義 相対論の基礎」和田 純夫著 サイエンス社 「相対性理論入門講義」 風間洋一著 培風館 「相対性理論」小玉英雄著 培風館 「一般相対論入門」須藤 靖著 日本評論社 「現代宇宙論」松原 隆彦著 東京大学出版会 「人生一般ニ相対論」須藤 靖著 東京大学出版会 「明解 相対性理論入門」恒岡 美和著 聖文新社 「なっとくする相対性理論」松田卓也・二間瀬敏史著 講談社 「相対性理論」窪田高弘・佐々木隆著 裳華房 そのほか必要に応じて紹介します。 (成績評価方法) 平常点 (授業・実験への出席・参加状況) とレポートにより総合的に評価 する。 講義ノートを以下の個人 HP のサイトに掲載予定: http://lab.twcu.ac.jp/lim/sub4.html 2 3 第1章 古典物理学の破たんと新 しい時空観 1.1 慣性系とガリレイ・ニュートンの相対性原理 物理学、特に力学の大きな目的は、物体の運動を正確に記述すること である。運動というのは、それを観測する観測者 (observer) から見た物 体の位置の時間的変化、という形で認識される。では、古典力学の法則 というのは、どの様な観測者から見た時に正しいと言えるであろうか? 常識的には、地上に静止している観測者に対して成り立つと考えられ る。しかし、実際には地球は自転し、太陽の周りを公転してもいる。更 に、太陽自身が銀河の中心の周りを回っている。つまり、地上に静止し た観測者は、実際にはかなりのスピードで動いていて、決して静止して はいない。では、いったいどの様な観測者を想定すべきであろうか?し かし、力学の法則を用いるのに、いちいちこうした(宇宙全体の)こと まで気にする必要があるのであろうか? 実は、「ガリレイ・ニュートンの相対性原理」というものがあり、観測 者が止まっているか、動いているか悩む必要はないのである。これは、以 下のようなことを主張する: ガリレイ・ニュートンの相対性原理: 互いに等速で運動する観測者で あれば、どの観測者から見ても物理法則は変わらない。 静止している、あるいは等速度(等速直線運動)で動いている観測者 のことを 「慣性系」 と呼び、この相対性原理の主張しているのは、どの慣性系が特別(絶対 的)ということはなく、全ての慣性系で物理法則は等しく成り立つという 4 第1章 古典物理学の破たんと新しい時空観 こと。従って物理法則の違いを用いて慣性系を区別することは出来ず、慣 性系が動いているかどうかは相対的にしか決められないことになる。 (例 1)飛行機の中でコーヒーを。 時速 500 km で飛ぶ飛行機の中でも、等速である限り、地上と同じよう にコーヒーが飲める。 (N.B.)ただし、飛行機が急に加速すると、落ち着いてコーヒーが飲めな くなる。これは一般的に言えることで、加速する観測者(加速度系)か ら見ると、力学のニュートンの運動方程式は成り立たず、あえて成り立 たせようとすると、「慣性力」を考えなくてはならない。 (例 2)電車内でリンゴを落とす。 一定の速さで走っている電車内で、人がリンゴを静かに落とすと、こ の人から見るとリンゴは単に真下に自由落下する。しかし、地上に静止 している別の観測者から見ると、リンゴの運動は “水平投射”の運動に見 える (図 1.1 参照)。しかしながら、いずれの観測者(慣性系)から見ても 運動方程式に従った運動に見える。 図 1.1: リンゴの落下運動 1.2. 速度の合成則と運動方程式 1.2 5 速度の合成則と運動方程式 ガリレイ・ニュートンの相対性原理は、数式を用いてきちんと示すこ とも出来る。 まず 「相対速度」あるいは「速度の合成則」 について考えよう。簡単のため、1 次元的な運動に限定して考える。ある 慣性系 Σ と、これに対して x 軸方向に等速度 v0 で動く別の慣性系 Σ0 を 考える。ただし、Σ, Σ0 は t = 0 では同じ点にいたとし、Σ, Σ0 は自分の いる位置を原点とする x, x0 座標を持ち、これで第3者の物体の位置を測 るものとする。 例えば物体がある時刻に、ある場所に存在する、といったことを 「事象 (event)」 と呼ぶ。事象は、それの起きる時刻と場所を用いて表すことが出来る。あ る同一事象を、Σ, Σ0 のそれぞれの慣性系から見た時に、(t, x) および (t0 , x0 ) で起きた出来事であるとすると、古典物理学では、両者には明ら かに次の関係がある: t0 = t, (1.1) x0 = x − v0 t. (1.2) 図 1.2: ガリレイ変換 ((1.2) については図 1.2 を参照)。これらの関係式は、事象の時刻、位置 を Σ の (t, x) から Σ0 の (t0 , x0 ) へ “変換” する式で、 第1章 6 古典物理学の破たんと新しい時空観 「ガリレイ変換」 よ呼ばれる。 (1.1) の関係は古典物理では当然であり、時間というものは絶対的で、 だれから見ても同じように過ぎて行くことを表している(相対性理論で は時間は絶対的ではなくなる)。 例えば、Σ から見て x 軸方向に速度 v で走る自動車があったとする。 0 Σ から見た時の、この車の速度、つまり 「相対速度」 v 0 は v 0 = v − v0 (相対速度) (1.3) となる。あるいは v = v 0 + v0 (1.4) とも書ける。(1.3), (1.4) の様な関係式を 「速度の合成則」 という。 速度の合成則は、ガリレイ変換の式を用いて示すことも出来る。Σ、Σ0 系における車の速度 v, v 0 は v= dx , dt v0 = dx0 dt0 (1.5) と微分で書けるが、(1.1)、(1.2) より v0 = dx0 d dx dx0 = = (x − v0 t) = − v0 = v − v0 0 dt dt dt dt (1.6) となり、速度の合成則(相対速度の式)(1.3) が得られる。 (N.B.) 静止している慣性系 Σ から見ると、エンジンを切り、力の働いて いない車は当然静止している。一方、Σ0 から見ると、車は −v0 で等速直 線運動する様に見える。つまり、Σ, Σ0 いずれの慣性系から見ても、 「物体に力が働いていない時、物体は(静止を含め)等速直線運動をす る」 という Newton の力学の第1法則である「慣性の法則」が成り立つこと が分かる。こうして、 「慣性系」とは「慣性の法則」が成り立つ様な観測 者であると言える。 次に Newton の第2法則、即ち運動方程式は、Σ と Σ0 で同じになるか どうかみてみよう。Σ と Σ0 から見た車の加速度を a, a0 と書くと、(1.3) 1.3. 電磁気学におけるガリレイ・ニュートンの相対性原理の破たん 7 より、相対速度は定数 v0 だけ違うだけなので、加速度はどちらでも同じ で、a0 = a であると思われる。実際、(1.1)、(1.3) より dv 0 d dv dv 0 a = 0 = = (v − v0 ) = =a dt dt dt dt (1.7) a0 = a (1.8) 0 となり が言える。従って、車に働く力は Σ、Σ0 いずれから見ても同じで F 0 = F であるという前提に立つと(相対性理論ではこれも崩れる) F = ma ↔ F 0 = ma0 (1.9) が言え、従って、運動方程式は Σ、Σ0 いずれから見ても、全く同様に成 立する。こうして、確かに「ガリレイ・ニュートンの相対性原理」が成り 立っていることが分かる。 1.3 電磁気学におけるガリレイ・ニュートンの相 対性原理の破たん ガリレイ変換に基づいたガリレイ・ニュートンの相対性原理は、ニュー トン力学においては正確に成り立っていることが分かったが、実は、も う一つの古典物理学の柱である「電磁気学」においては重大な問題が生 じ、もはや成立しなくなることが分かる。 まず、19 世紀末に登場したマクスウェル(Maxwell)理論について、ご く簡単に解説しよう。マクスウェルは、それまでに知られていた電磁気 学の法則を 4 つの微分方程式の形にまとめた。これを 「マクスウェル方程式」 と言う。正確には、その過程で自らの考察の基づいて、少し修正を行って いる。それらの微分方程式を組み合わせてみると、驚くことに電界、磁 ~ H ~ に関する “波動方程式”が現れることが分かった 界(電場、磁場)E, のである。 波動方程式は電界、磁界の振動が空間を伝わって伝播することを意味 する。つまり、マクスウェルは自分の理論から、電界、磁界の波である 「電磁波」 8 第1章 古典物理学の破たんと新しい時空観 の存在を予言したのである。この電磁波の伝わる速さは、 (何も物質の存 在しない真空中では) 1 = 3.0 × 108 (m/s) (²0 , µ0 :(真空での)誘電率と透磁率) (1.10) √ ²0 µ0 の様に、 (真空での)誘電率と透磁率を用いた定数として導かれたが(正 確には 299, 792, 458 (m/s))、これは当時知られていた光の伝わる速さ、 即ち 「光速度」 とほぼ一致していた!これから、 「光は実は電磁波(の一種)である」 という事が判明したのである。目に見える可視光は波長が 5 × 10−7 (m) 程度の電磁波であり、これより波長の短い(振動数の高い)電磁波には、 紫外線、エックス線、ガンマ線が、波長の長い電磁波には、赤外線や、電 波などがある。 という事で、電磁気学を集大成したマクスウェル理論から光速度につ いて 1 c= √ (1.11) ²0 µ0 という定数であるという非常に重要な結論が得られたのである。光速度 は相対論(相対性理論の略)で決定的に重要な定数なので、特に c で表 す。しかし、既に議論したように、ガリレイ変換から導かれる「速度の 合成則」によれば、何かの速度というのは、それを観測する慣性系に依 存して変わるはずではないか。これが、 「重大な問題」の正体である。つ まり、一定の光速度 c を予言する電磁気学の法則は、一体どの様な慣性 系に対して正しいのだろうか? この問題に対して、二つの立場が想定される。 立場 I: 電磁気学についても相対性原理が成り立つと考える。つまり、どの慣 性系からみても電磁気の法則は等しく成り立ち、従って、光速度は観測 者(慣性系)に関係なく常に c (秒速 30 万キロメートル)である。 立場 II: 電磁気学の法則が厳密に成り立つ慣性系は一つしかなく、その慣性系 から見ると光速度は c となるが、他の慣性系から見ると、 「速度の合成則」 で計算される別の値になる。 立場 I だと、相対性原理は電磁気学で保持できるが、一方、力学での 「ガリレイ・ニュートンの相対性原理」の起因するガリレイ変換、それか 1.3. 電磁気学におけるガリレイ・ニュートンの相対性原理の破たん 9 ら導かれる速度の合成則は成り立たない事になり、変更せざるを得ない ことに成る。尚、立場 I における、光速度が慣性系に依らず一定である という事を 「光速度不変性」 という。 一方、立場 II だと、速度の合成則は成立すものの、電磁気学では相対 性原理を放棄せざるを得ないことに成る。 実際の世界では、立場 I が選択されていることが分かっている。立場 I、即ち「光速度不変性」を支持する決定的な実験事実として有名なのが、 マイケルソン-モーリー (Michelson-Morley) の実験で得られたものであ る。実は、マイケルソン達は立場 II の視点を確かめようと実験を計画し たのだが、結果的に立場 I の光速度不変性を確立させることに成ったの である。 1.3.1 マイケルソン-モーリーの実験 上で述べた立場 II に立てば、電磁気学の法則が厳密に成り立つ “宇宙の 静止系”から見れば光速度は c であっても、仮にこの静止系に対し、光の 進む方向に 1 × 108 (m/s) で運動する慣性系から見れば、光速度は 2 × 108 (m/s) に見えるであろう。つまり、地球上で光速度を測定することによっ て地球(地表)の速度(宇宙の静止系に対する)を決定出来るはずである。 当時の人々は、例えば音波は空気中を伝播するように、全ての波動に はそれを伝える媒質があるはず、と信じていた。光の(仮想的な)媒質は “エーテル (ether)” と呼ばれ宇宙全体に充満し(遠くの星からの光も届く ので)、宇宙の静止系に対して静止していると考えられた。光はエーテル に対して、あらゆる方向に c の速度で伝播するというわけである。よっ て地球上で光速度を測定する実験は地球のエーテルに対する運動速度を 決める実験とも言える。 こうした目的で行われた有名な実験がマイケルソン-モーリー (MichelsonMorley) によるものであった(1887 年)。実験装置の模式図は図 1.3 のよ うなものである。 光源 A から出た光は half-mirror B(光を半分透過し半分反射する鏡) によって二つの方向に分けられ、それぞれ二つの鏡 C, E (B から等距離 にあるとする)で反射して B に戻って一緒になり、B より下側に進む。 この装置に対してエーテルが動いていると、一般には光が B → C → B 10 第1章 古典物理学の破たんと新しい時空観 図 1.3: マイケルソン・モーリーの実験 と進むばあいと B → E → B と進む場合で、それに要する時間が異なり、 その結果 B に戻ったときの波の位相 (“山、谷”といった事) にずれが生じ、 検出器 D で干渉(二つの経路の光が強めあったり、弱めあったり)が観 測される。この干渉の様子を観測して、地球からみたエーテルの速さ、見 方を変えるとエーテルに対する地球の速さを決めようとしたのである。 (演習 1)エーテルが、装置の A から B の方向(右方向)に速さ v で動 いているとする。 (1) この時、地上の観測者から見たときの、B → E と進む時の光の速さ を求めなさい。 (2) この時、地上の観測者から見たときの、B → C および C → B と進 む時の光の速さをそれぞれ求めなさい。 しかし、実際に観測すると、時間差による干渉はいっさい現れなかった (二つの経路からの光は常に強め合っていた)のである。こうして、エー テルなど存在せず(実際、マクスウェル理論に依れば、光は真空中でも c の速さで伝わる)、地球の速度に関係なく光速は常に一定である、と考 えざるを得なくなったのである。つまり 「光速度不変性」 が実際に確かめられたことになる。 1.4. 相対性理論の登場 1.4 11 相対性理論の登場 こうして立場 I が正しいことが判明したが、これは、一方で、速度の 合成則、従ってガリレイ変換が実は(厳密には)正しくない事を意味す る。こうして、古典的なニュートン力学は変更を余儀なくされ、新しい 理論が必要となったのである。 アインシュタインは、マイケルソン-モーリー の実験事実を踏まえ、以 下の指導原理を置いて、理論を構築した: 1.光速度は全ての慣性系において等しい(光速度不変の原理) 2.物理法則は全ての慣性系において等しく成り立つ(相対性原理) こうして構築されたのが 「(特殊)相対性理論」 である。 尚、マクスウェルにより確立された電磁気学の方は変更する必要がな いことに注意しよう。直感的に言えば、電磁気学は光速度が c = √²10 µ0 で 一定であることを導き、光速度不変を原理とする相対論と “相性が良い” のである。 相対性理論では、速度の合成則を導くガリレイ変換はもはや成り立た ない事に成る。これに取って代わるのが、 「ローレンツ変換」 である。 ガリレイ変換は、時間はどの慣性系から見ても同じように経過する、と いう 「時間の絶対性」 に立脚したものであった。従って、相対性理論では、それまでの常識で あった「時間の絶対性」は崩れ、時間と空間に関する新しい考え方が生 まれた。 ローレンツ変換、相対性理論の詳細な説明に入る前に、以下の節で、ま ず時間に関する、今までの常識では考えられない様な新しい概念につい て少し解説しよう。 1.5 慣性系による時間の違い 「光速度不変の原理」を認めると、今までの常識からすると、 「常識外 れ」なことが色々と起きることになる。そうした典型的な例として、ま 12 第1章 古典物理学の破たんと新しい時空観 ず慣性系によって、あることが起きてから別の事が起きるまでの時間が 異なる事、即ち、二つの事象の間の(経過)時間が異なることを見よう。 例として、一定の速さ 30(m/s) で直線上を走る、長さが 30 万 km (!) の電車を考えよう。電車の最後尾で光が一瞬ピカッと光ったとする(閃 光(フラッシュ))。この時、電車の最前部に光が到達するのは何秒後で あろうか? まず、電車内で静止している慣性系 Σ0 から見ると、光速度不変の原 理から光は秒速 30 万 km で進むので、1 秒後に最前部に到着するはずで ある。 一方、地上に静止している慣性系 Σ から見ると、光速度不変の原理か ら光はやはり秒速 30 万 km で進むが、1 秒後には電車の最前部も 30m 前 方に動いているので、最前部に到着するのは 1 秒後より後になる。つま り Σ 系の方が、経過時間が長く成るのである( 図 1.4 を参照)。 図 1.4: 慣性系による光の到達時間の違い (N.B.) 実際の相対性理論では、 「動いている物体は、 (動いている方向に) 縮む」という「ローレンツ収縮」が起きるので、Σ から見た電車の長さは 30 万 km より短くなる。しかし、Σ 系の方が、経過時間が長く成る、と いう事実は変わらないことが分かる。 (演習 2) 古典物理学では、「時間の絶対性」よりフラッシュの光が到着 1.6. 同時性の破れ 13 するまでの時間は Σ と Σ0 いずれから見ても当然同じはずである。古典物 理学に基づいて、この同じ問題を考え、光が到着するまでの時間が同じ になる事を説明しなさい。その際、どこが相対論と決定的に違うか述べ なさい。ただし、Σ0 から見た光速度は、秒速 30 万 km としてよい。(ヒ ント:速度の合成則を用いる。) 1.6 同時性の破れ 同じく時間に関係する “常識外れ”の現象として、ある慣性系から見て 同時に起きる二つの事象が、 (これに対して運動する)別の慣性系から見 ると、もはや同時ではなくなる、という事を説明する。 前節と同じ電車を用いるが、今度は閃光(フラッシュ)は電車のちょう ど真ん中の位置で左右に向け発せられたとし、電車の最前部と最後部に 光が到着するという二つの事象の時刻が同時であるかどうかを考えるこ とにする。 電車内の慣性系 Σ0 か見ると電車は当然静止しており、光は電車の前後 に同じ速さ c で進むので、当然、最前部、最後部には同時に到着するは ずである。一方、地上の慣性系 Σ から見ると、相変わらず光は電車の前 後に同じ速さ c で進むが、電車が前方に進むので、前方に進む光は電車 を追いかけることになり(“追いかけ算”)3 × 108 − 30 (m/s) の速さで最 前部に近づくことになる。一方で、後方に進む光は 3 × 108 + 30 (m/s) の 速さで最後部に近づくことになる(“出会い算”)。よって、明らかに、光 は後方に先に到着し、二つの事象の時刻はもはや同時ではなくなる! この様に、同時であるかどうかは、見る慣性系に依存することになる。 これが 「同時性の破れ(喪失)」 と言われるものである。 15 第2章 動いている時計の遅れと ローレンツ収縮 ここまで、相対論では、 「光速度不変の原理」に起因して時間の概念が 大きく変わり、それまでの物理学ではあり得ない “非常識的”な事柄が色々 と起こり得ることを説明したが、この節では、そうした非常識的な事柄 の代表的なものとして、動く時計は静止している時に比べて遅れるとい う事実を議論する。これは時間間隔が慣性系に依って異なるという事で あるが、時間だけでなく、空間的間隔、即ち物の長さも影響を受け、動く 物体は、その運動方向に縮むのである。この「ローレンツ収縮」につい ても議論する。 これまで定性的な議論をして来たが、ここでは、定量的に時計がどれ 位遅れるのか、といった事を計算で求めることにする。 2.1 動いている時計の遅れ 相対論では、運動している物体中での出来事はそれが止まっていた時 よりゆっくりと起きるように見える、という事が生じる。例えば二つの時 計の時間を完全にそろえておいてから、一方の時計を運動させると、運動 している時計は、静止している時計と比べて遅れる、ということになる。 この事情を調べるために、慣性系 Σ は地上に止まっていて、Σ に対し て直線上を速度 u で遠ざかる電車の上に慣性系 Σ0 が乗っているとする。 それぞれは、閃光が上下の鏡 (距離 L0 だけ離れている)の間を行き来し、 鏡にぶつかる毎にチック・タックと時を刻む時計を持っているとする(図 2.1 参照)。電車が静止していたとき二つの時計は完全に同じように時を 刻んだものとする。 Σ から見ると、自分の時計(地上の時計)は止まっており何も変なこ とは起きないはずで、下の鏡から上の鏡に光(閃光)が達するのに要す 第 2 章 動いている時計の遅れとローレンツ収縮 16 図 2.1: 止まっている時計と動いている時計 る時間 t0 は、単に時計の長さ L0 を c で割った t0 = L0 c (2.1) である。これに対し、Σ から見ると、図 2.2 より分かるように、電車の中 の時計の下から上に光が進むのに t だけ時間がかかるとすると、閃光の q 2 2 進んだ距離は L0 + (ut) になり、これが(光速度不変の原理により)ct と等しいはずである。 これから t は q L0 L20 + (ut)2 = ct → t = q c 1− u2 c2 (2.2) で与えられる。よって 1 t= q 1− u2 c2 t0 = γt0 (2.3) 2.1. 動いている時計の遅れ 17 図 2.2: 動いている時計の遅れに図解 となる。ここで γ は 1 γ≡q 1− u2 c2 (2.4) と定義され、相対論の議論に頻繁に登場し、 「ガンマ因子 (gamma factor)」 と呼ばれるものである。u がゼロでない限り γ > 1 なので、t は t0 より ガンマ因子倍だけ大きくなる。こうして時計は遅れることになる。要は、 光が斜めに進むために、進む距離は L0 より長く成り、一方で光速度不変 の原理があるため、これは光が進むのに要する時間が長く成ることを意 味するのである。 (演習 3) 古典物理学では、「時間の絶対性」より Σ, Σ0 のいずれから見 ても、下の鏡から出発した光が上の鏡に達するのに要する時間は同じは ずである。古典物理学に基づいて考えると、光が到着までに要する時間 が同じになる事を説明しなさい。ただし、Σ0 から見た時に、電車中の時 計の下の鏡から上の鏡に進む光の光速度は、c = 3.0 × 108 (m/s) として 18 第 2 章 動いている時計の遅れとローレンツ収縮 よい。 もちろん Σ0 から見ると自分の時計には、電車が静止していた時と同様 に遅れは生じないように見える。こうして、慣性系によって時間間隔が 変化する、という驚くべき結果が得られる。 2.2 ローレンツ収縮 今度は電車の中の時計を倒して、水平方向に光(閃光)が行き来する 場合を考えよう (図 2.3 を参照。前章で、慣性系に依る時間の違いを考え た場合と同様の状況設定)。 図 2.3: ローレンツ収縮についての思考実験 Σ0 から見ると光の往復時間は単に 2 Lc0 であるが、これを Σ から見る と、光が Σ から遠ざかる場合には、鏡も電車と共に遠ざかるので c − u の 速度で鏡に接近し、一方、Σ に近づく場合には c + u で鏡に接近する事に なる(「追いかけ算」と「出会い算」の違い)。よって Σ から見た光の往 2.3. 同時性の破れ(再考) 19 復時間は、Σ から見た電車中の時計の鏡の間の距離を L とすると 2 Lc L L + = 2 c−u c+u 1 − uc2 (2.5) となる。 一方において、上で議論した様に、動く時計の刻む時間間隔は γ 倍に なるので、これは 2 Lc0 の γ = q 1 2 倍になるはずである。よって 1− u2 c 2 Lc 1 =q u2 1 − c2 1− つまり s L= 1− u2 c2 ×2 L0 , c u2 1 L0 = L0 2 c γ (2.6) (2.7) となり、u がゼロでない限り、Σ から見た時計の長さ L は静止している 時の長さ L0 より γ1 < 1 倍に短くなる事が分かる。 こうして、ローレンツ収縮が起きることが結論付けられる。 (N.B.) 一つ注意すべき点は、電車の中の時計を立てていた時には、時計 の長さは Σ, Σ0 いずれから見ても L0 として良かったことである。つま り、慣性系が動いても、運動方向と直交する方向の長さは影響を受けず、 運動方向のみがローレンツ収縮を起こす、という事である。 2.3 同時性の破れ(再考) ローレンツ収縮の議論を受けて、先に議論した同時性の破れについて 再考しよう。先の議論では、Σ0 から見て電車の真ん中から発せられたフ ラッシュは電車の最前部、最後部に同時に到着するが、Σ から見ると、電 車の最後部の方に先に到着し同時ではない事を議論した。ここでは、具 体的に、最後部と最前部に光が到着する時刻の差を求めてみよう。 Σ に対して直線上を速度 u で遠ざかる電車の上に Σ0 が乗っているとす る。Σ0 から見た電車の長さを Lt0 とすると、前節で述べたローレンツ収 縮により、Σ から見た電車の長さ Lt は 1 Lt = Lt0 = γ s 1− u2 Lt0 c2 (2.8) 第 2 章 動いている時計の遅れとローレンツ収縮 20 で与えられる。すると、Σ から見ると、電車の最前部、最後部に光が到 着する時刻の差は(「追いかけ算」と「出会い算」) Lt 2 c−u − Lt 2 c+u = 1 uLt c2 2 − uc2 =q uLt0 c2 1− (2.9) u2 c2 となる。ここで (2.8) を用いた。こうして、Σ0 から見ると同時に、距離 uLt0 Lt0 離れた二つの場所で起きた二つの事象は、Σ から見ると q c2 2 1− u2 c 時刻がずれていることになる。 だけ 21 第3章 ローレンツ変換 先に述べた様に、古典力学において有効であったガリレイ変換は、相 対論では 「ローレンツ変換」 によって取って代わられる。今まで述べた、相対論における諸々の常識外 の事柄は、全てこのローレンツ変換の式を用いて説明することが出来る。 結論から述べると、ローレンツ変換は次の様に与えられる: x − ut x0 = q 2 1 − uc2 t − ux 0 c2 q t = . 2 1 − uc2 (3.1) ところで、日常的な世界では物体の運動速度は光速度に比べて非常に 小さいために古典物理学の世界で十分正確に世界が記述出来ている、と 考えられる。よって、Σ0 の速さ |u| が光速度に比べてずっと小さい場合、 即ち |u| ¿ c の場合には、ローレンツ変換は、古典物理学のガリレイ変 換に帰着すると期待される。実際 |u| ¿ c → q 1 1− u2 c2 ' 1, ux '0 c2 (3.2) とすると、(3.1) は x0 ' x − ut t0 ' t (3.3) となるが、これはガリレイ変換 (1.1)、(1.2) に他ならない((3.3) では、v0 を u としている)。 尚、(3.3) は (3.1) において、形式的な極限 c → ∞ (3.4) 第3章 22 ローレンツ変換 をとっても得られる事に注意しよう。この様に、相対論における関係式 で c → ∞ の極限をとると古典物理の結果に帰着する、という事実は覚え ておくと便利である。 (3.1) の変換は Σ → Σ0 の変換であるが、Σ0 → Σ の 「ローレンツ逆変換」 を考えることも出来る。(3.1) を x, t について解くと x0 + ut0 x = q 2 1 − uc2 ux0 c2 2 − uc2 t0 + t = q 1 . (3.5) が得られるが、これがローレンツ逆変換である。(3.5) を (3.1) と比較する と、(3.1) において (x, t) ↔ (x0 , t0 ) の交換を行い、更に u → −u とすれ ば (3.5) が得られる事が分かる。これは当然の結果であると言える。それ は、Σ0 が Σ から見て速度 u で動いている場合、逆に Σ0 から見ると Σ は −u で動いているからである。 (演習 4) ローレンツ変換 (3.1) より、ローレンツ逆変換 (3.5) を導出しな さい。 3.1 ローレンツ変換の導出 前章で述べた、動く時計の遅れ、といったいくつかの相対論特有の現 象は全てこのローレンツ変換によって説明されるべきである。よって、逆 に、前章で学んだ事実を再現する、という条件を課す事に依ってローレ ンツ変換を導出することが出来るのである。この考え方に従って、ロー レンツ変換を、いくつかのステップを踏んで導いてみよう。 ここでは、説明の関係で、ローレンツ逆変換の方を導いてみる事にす る。ガリレイ変換同様に、ローレンツ変換、ローレンツ逆変換は “線形変 換”であると考えられるので、まずローレンツ逆変換を x = Ax0 + Bt0 t = Dx0 + Et0 と、四つの係数 A, B, D, E を用いて書く。 (3.6) 3.1. ローレンツ変換の導出 23 ステップ 1: Σ0 の運動 例えば、Σ0 は電車の中で x0 = 0 の位置で静止しているとする。この事 象は x0 = 0 (3.7) という式で書ける。よって(3.6)より x = Bt0 t = Et0 (3.8) よって B t (3.9) E が得られるが、一方で Σ から見ると Σ0 は速度 u で x 軸の方向に運動し ている様に見えるので、 x = ut (3.10) x= が成立する。よって、(3.9) と比較すると B = u → B = uE E (3.11) が言える。 ステップ 2: 動く時計の遅れ 動く電車の中におかれた時計は Σ から見ると遅れているように見える、 という事実を用いる。電車内の時計は x0 が一定の位置にいるので、例え ば x0 = 0 としよう。すると(3.6)より t = Et0 (3.12) となる。これより、Σ0 から見て、x0 = 0 で起きる、ある二つの事象の間 の時間間隔が ∆t0 であるとすると、Σ から見たときの同じ事象間の時間 間隔 ∆t は ∆t = E · ∆t0 (3.13) となる。実際、例えば Σ0 から見て t0 = 1, 2 で起きた二つの事象は、Σ から見ると (3.12) より t = E, 2E で起きたことになり、その時間間隔は 2E − E = E となって Σ から見る場合の E 倍になる。二つの事象として、 電車内の時計の下の鏡を閃光が出発する、上の鏡に閃光が到着する、と いう事象を考える。すると、動く時計は遅れて見える、ということから ∆t = γ · ∆t0 (γ = q 1 1− u2 c2 ) (3.14) 第3章 24 ローレンツ変換 となる((2.3) 参照)。(3.13) と比較すると E=γ (3.15) が得られる。 ステップ 3: 同時性の破れ (2.9) の所で述べた様に「Σ0 から見ると同時に、距離 Lt0 離れた二つ uLt0 の場所で起きた二つの事象は、Σ から見ると q c2 2 1− u2 だけ時刻がずれてい c る」。この事実を用いる。距離 Lt0 離れた二つの場所として x0 = 0 と x0 = Lt0 の 2 点をとる。Σ0 から見て時刻 t0 に x0 = 0 で起きた事象と、同 じ t0 に x0 = Lt0 で起きた事象は、Σ から見ると、(3.6) よりそれぞれ時 刻t が Et0 , DLt0 + Et0 (3.16) で起きた様に見える。従って Σ から見た、二つの事象の時間差は (DLt0 + Et0 ) − Et0 = DLt0 (3.17) uLt0 となる。一方これが (2.9) で求めた q c2 2 1− u2 に等しいので c u uLt0 2 DLt0 = q c 1− u2 c2 2 → D=q c 1− u2 c2 = u γ c2 (3.18) が得られる。 ステップ 4: 光速度不変 最後に、Σ、Σ0 いずれから見ても光速度は c で等しい、という事実を 用いる。Σ0 から見て t0 = 0 に原点を通過する閃光の伝播の事象は x0 = ct0 を満たす (t0 , x0 ) で表されている。これを (3.6) に代入すると x = (Ac + B)t0 t = (Dc + E)t0 (3.19) となる。一方、光速度不変の原理から Σ から見ても閃光は c の速さで伝 播するので x = ct (3.20) が成立するはずである。よって (3.19)、(3.20) より (Ac + B)t0 = c(Dc + E)t0 → Ac + B = c2 D + cE (3.21) 3.1. ローレンツ変換の導出 25 が得られる。 こうして、(3.11)、(3.15)、(3.18)、(3.21) より A, B, D, E に関する次 の様な連立方程式が得られたことに成る: B = uE (3.22) E=γ u D = 2γ c Ac + B = c2 D + cE (3.23) (3.24) (3.25) これから容易に A=γ B = uγ u D = 2γ c E=γ (3.26) が求まる。よって (3.6) より x = γx0 + uγt0 u t = 2 γx0 + γt0 c (3.27) となるが、これはローレンツ逆変換(3.5)に他ならない。 尚、t, t0 に光速度 c をかけ算して ct, ct0 として x, x0 と次元を揃えてロー レンツ変換(3.1)を書き直すと、以下の様に行列を用いたきれいな形に 書けることが分かる: Ã ! 0 ct x0 = q −q 1 2 1− u2 c u c −q 2 q 1− u2 u c 2 1− u2 c 1 Ã ct x ! (3.28) 2 1− u2 c c ここで γ と並んで相対論で用いられる β を β≡ u c (γ = √ 1 ) 1 − β2 (3.29) と定義すると、(3.28) は β, γ を用いて Ã ct0 x0 ! Ã = γ −βγ −βγ γ の様に対称行列による簡潔な形に書ける。 !Ã ct x ! (3.30) 26 3.2 第3章 ローレンツ変換 ローレンツ変換の少し数学的な導出 ローレンツ変換は、光速度不変の原理から次のように導出することも 出来る。まず、 「世界間隔」S というものを考える。慣性系 Σ においては S 2 = −(ct)2 + (x2 + y 2 + z 2 ) (3.31) √ で定義され、t = 0 とすると S = x2 + y 2 + z 2 となり、S は (x, y, z) と いう座標を持つ点 P と原点の間の距離に他ならない。 相対論ではローレンツ変換に見られるように、時間と空間が混ざり合 うので、(ct, x, y, z) を座標とする “点” の集合である 時空 (space-time) という4次元的な “空間”の概念が生まれ、世界間隔は、(ct, x, y, z) で表 される時空の点の原点 (0, 0, 0, 0) からの一種の “距離”と解釈される。こ のように距離が定義される幾何学は(ピタゴラスの定理が成立たないの で)「非ユークリッド幾何学」と呼ばれる。t = 0 に原点を出発した光は √ 時刻 t では x2 + y 2 + z 2 = ct を満たす点に達するので、世界間隔 S = 0 を満たす4次元時空上の “直線” の上を動く事になる。光速度不変の原理 により、別の慣性系 Σ0 においてもその世界間隔は S 0 = 0 のはずなので、 「世界間隔はローレンツ変換の下で不変である: S = S 0 」 ことを要請することにする。これは、光速度不変の要請 (S = 0 → S 0 = 0) を一般化した、より強い条件であることに注意しよう。 ここで世界間隔を、“虚数時間”を導入してピタゴラスの定理が使える ように書き直す。即ち、t̂ = it とすると S 2 = (ct̂)2 + x2 + y 2 + z 2 (3.32) と書け、ピタゴラスの定理と同じ形になる。 普通の3次元空間においては、座標系の空間回転によりベクトルの成 分が (x, y, z) → (x0 , y 0 , z 0 ) に変化してもベクトルの長さは不変なので 0 0 0 x2 + y 2 + z 2 = x 2 + y 2 + z 2 が言える。例えば x − y 平面上の角 θ の回 転では Ã 0! Ã !Ã ! x cos θ − sin θ x = (3.33) 0 y sin θ cos θ y の様に “回転の行列”を用いて二つの系の座標の関係が表される。同様に して、ある慣性系 Σ から、これに対して x 方向に速度 u で動く慣性系 Σ0 3.2. ローレンツ変換の少し数学的な導出 27 へのローレンツ変換においては、y, z 座標は変換されないと考え、S 02 = S 2 → (ctˆ0 )2 + x02 = (ct̂)2 + x2 より Ã ctˆ0 x0 ! Ã = − sin θ cos θ cos θ sin θ !Ã ct̂ x ! (3.34) の関係が成立つと考えられる。しかし、t̂, tˆ0 は純虚数なので、θ も純 虚数である必要がある。実際、θ が小さいとすると、(3.34) より x0 ' θct̂ + x (sin θ ' θ, cos θ ' 1) となり θ が純虚数である必要がある。そこ で θ → iθ とすると、オイラーの公式より ei(iθ) − e−i(iθ) eθ − e−θ =i = i sinh θ, 2i 2 sin(iθ) = (3.35) 同様に cos(iθ) = cosh θ となるので、t, t0 に戻すと Ã ct0 x0 ! Ã = − sinh θ cosh θ cosh θ − sinh θ !Ã ct x ! (3.36) が得られる。ここで Σ0 系の原点 x0 = 0 は Σ 系から見ると速度 u で運動 するので x0 = − sinh θ (ct) + cosh θ x = 0 ↔ x − ut = 0 (3.37) 即ち u =β c と θ が決定される。この様に決まる θ は 「ラピディティー(rapidity)」 と呼ばれる。 これから cosh θ = √ 1 2 = q 1 = √1 tanh θ = 1−β 2 2 1−tanh θ (3.38) 1− u2 = γ (演習 5 参照)、ま c た sinh θ = tanh θ × cosh θ = βγ となるので、(3.36) は Ã ct0 x0 ! Ã = γ −βγ −βγ γ !Ã ct x ! (3.39) と書けるが、これは(3.30)と同じである。 (演習 5)“ 双曲線関数 ”sinh θ、cosh θ は三角関数と似た性質を持つ。以 下の小問に答えなさい。 第3章 28 ローレンツ変換 (1) 関係式 cosh2 θ − sinh2 θ = 1 が成り立つことを示しなさい。 (2) 関係式 1 − tanh2 θ = cosh1 2 θ が成り立つことを示しなさい。 (3) (3.36) に現れる次の行列の行列式が 1 であることを示しなさい: Ã 3.3 cosh θ − sinh θ − sinh θ cosh θ ! ローレンツ変換を用いたローレンツ収縮の導 出 一度ローレンツ変換が求まると、全ての常識外れの事柄は、これによ り説明されるはずである。ここでは、ローレンツ収縮を、ローレンツ変 換から導いてみよう。Σ0 から見て一端 P が原点 (x0 = 0) に、他端 Q が x0 = L0 の位置にあり静止している棒、つまり Σ0 から見た時の長さが L0 の棒を考える。P、Q がそこに存在するという事象は Σ0 から見ると、そ れぞれ x0 = 0、x0 = L0 (t0 は任意) という事象である。これをローレンツ 変換の式(3.1)を用いて x, t の関係式に書き直すと x − ut P:0= q 2 1 − uc2 x − ut Q : L0 = q 1− u2 c2 → x = ut (3.40) s → x = ut + 1− u2 L0 c2 (3.41) となる。Σ から見たときの棒の長さは、同時刻における P, Q の位置座標 の差で与えられる。よって (3.40)、(3.41) で時刻を同じ t とすると、その 時の x 座標の差、即ち Σ から見たときの棒の長さ L は s L = ut + u2 1 − 2 L0 − ut = c s 1− u2 1 L0 = L0 2 c γ (3.42) で与えられる。これは(2.7)と同じで、ローレンツ収縮が起きることを 表している。 (N.B.) この様に、ものの長さを考える時には、同時刻での2点の座標の差を 考えることが本質的に重要である。しかし、古典物理学の場合と違って、 同時かどうかと言うのは、観測者(慣性系)によって異なる概念なので、 3.3. ローレンツ変換を用いたローレンツ収縮の導出 29 例えば Σ が棒の長さを測るのに同時刻 t での P、Q の事象を考えたとして も、Σ0 から見ると、これらの P, Q の事象はもはや同時刻ではない。つま り、棒の長さを測るために見ている事象が Σ と Σ0 では違うものである、 という点に注意する必要がある。 Σ と Σ0 がそれぞれ棒を持っているとしよう。それぞれの棒の長さを LΣ , LΣ0 とする。Σ と Σ0 がいずれも静止していた時には棒の長さは同じ で LΣ = LΣ0 = L0 であったとする。Σ に対して Σ0 が運動を始めると、Σ から見ると、Σ0 の棒がローレンツ収縮を起こし LΣ > LΣ0 の様に見える。 一方、Σ0 から見ると逆に Σ が自分に対して運動しているので、Σ の棒が ローレンツ収縮を起こし LΣ < LΣ0 と見えるであろう。これら二つの不等 式は明らかに矛盾している様に見える。 しかし、ここで注意したいのは、同一の棒であっても、その長さを測 る時に用いている事象は Σ と Σ0 では違う、という事実である。よって、 この一見矛盾して見える二つの事は、実は矛盾をきたしてはいないので ある。 31 第4章 相対論における速度の合 成則 先ず古典物理学で考える。ある慣性系 Σ と、これに対し x 軸の方向に 速度 v1 で運動する別の慣性系 Σ0 が在るとする。Σ0 から見て、ある自動 車が x 軸の方向に速度 v2 で運動しているとすると、Σ から見た時の自動 車の速度 v は v = v1 + v2 (4.1) の様に、単純な足し算で与えられる。これが古典物理学における「速度 の合成則」であった。しかし、ここで自動車の代わりに光(閃光)の伝播 を考えると、仮に Σ0 から見て光が c (秒速 30 万キロメートル)で伝播 するとすると v2 = c であり、もし v1 > 0 であるとすると、(4.1) より v = v1 + c > c (4.2) となり Σ から見た光速度は c を超えてしまう! しかし、相対論では「光速度不変の原理」により、Σ から見ても光速度 は c のはずであり、明らかに (4.1) の様な速度の合成則は成り立たない。 では(4.1)に替わる合成則はどの様なものであろうか?以下、相対論に おける速度の合成則を二通りの方法で求めてみよう。 4.1 地道な方法 まずは、地道(素直?)な方法で求めてみよう。Σ0 から見て x 軸方向 に速度 v2 で運動する自動車の事象を表す (t0 , x0 ) は x0 = v2 t0 → x0 = v2 t0 (4.3) 第4章 32 相対論における速度の合成則 を満たす。ただし、自動車は t0 = 0 で原点 x0 = 0 にいたとしている。こ れを Σ から見た時の事象を表す (t, x) の関係式で書き換えよう。その為 に、まずローレンツ逆変換の式((3.5) において u → v1 としたもの) x0 + v1 t0 x = q v2 1 − c21 t = 1 より得られる v1 x0 c2 v2 − c21 t0 + q . (4.4) 0 x x x0 + v1 t0 0 + v1 = 0 v1 x0 = t v1 x0 t t + c2 1 + c2 t0 (4.5) に注目する。ここで、右辺の変形においては、分母分子を t0 で割り算し ている。(4.5) の左辺は Σ から見た時の自動車の速度 v に他ならない。一 0 方、右辺においては、 xt0 は (4.3) より Σ0 から見た自動車の速度 v2 に他な らない。よって、(4.5) より v= v1 + v2 1 + v1c2v2 (4.6) が得られる。これが (4.1) に取って代わる、相対論における速度の合成則 である。 (4.6) は古典物理の極限では (4.1) に帰着することが分かる。実際 v1 , v 2 ¿ c (4.7) とすると、あるいは形式的に c → ∞ の極限をとると、(4.6) は v = v1 + v2 となり、(4.1) に帰着することが容易に分かる。 しかし v1,2 が光速度 c に近づくと v1c2v2 の因子が効き出し、合成された速 度 v は決して光速度 c を超えない事が分かる。例えば、v1 = v2 = 0.99000c としてみると、(4.6) より v = 0.99995c となり、非常に光速度に近くはな るが光速度を超えることはない。 4.2 双曲線関数を用いる方法 4.2. 双曲線関数を用いる方法 33 自動車を考える代わりに、Σ0 に対して x 軸の向きに速度 v2 で運動する 第 3 の慣性系 Σ00 を想定しよう。ある事象を、Σ, Σ0 , Σ00 から見た時の時 刻と位置座標を、それぞれ (t, x), (t0 , x0 ), (t00 , x00 ) としよう。ここで (t, x) → (t0 , x0 ) : 速度 v1 のローレンツ変換 (t0 , x0 ) → (t00 , x00 ) : 速度 v2 のローレンツ変換 (4.8) である。 ここで、ローレンツ変換は、空間回転による変換と良く似ている、と いう事実を思い出そう。x − y 平面上の空間回転の場合には、角 θ1 の回 転の後に、更に角 θ2 の回転を行うと、全体としては角 θ1 + θ2 の回転に なる。これは回転という線型変換を表す「回転行列」が満たす Ã ! Ã cos θ2 − sin θ2 cos θ1 − sin θ1 · sin θ2 cos θ2 sin θ1 cos θ1 Ã ! cos(θ1 + θ2 ) − sin(θ1 + θ2 ) = sin(θ1 + θ2 ) cos(θ1 + θ2 ) ! (4.9) の関係式からも分かる。なお、(4.9) では cos θ1 cos θ2 − sin θ1 sin θ2 = cos(θ1 + θ2 ) sin θ1 cos θ2 + cos θ1 sin θ2 = sin(θ1 + θ2 ) (4.10) という関係式を用いている。 ローレンツ変換は、言わば純虚数の角度 iθ (θ はラピディティー) によ る回転と見なせるので((3.34)、(3.36) 参照)、ローレンツ変換において も空間回転の場合と同様に、ラピディティー θ1 のローレンツ変換の後に、 更にラピディティー θ2 のローレンツ変換を行うと、全体としてラピディ ティー θ1 + θ2 のローレンツ変換に成るのではないかと予想される。 この予想が成り立つかどうか、具体的に確かめてみよう。まず、Σ → Σ0 のローレンツ変換は、(3.36) より分かるように Ã ct0 x0 ! Ã = cosh θ1 − sinh θ1 − sinh θ1 cosh θ1 !Ã ct x ! (4.11) と書ける。ただし(3.38)より(u → v1 として)ラピディティー θ1 は tanh θ1 = で与えられる。 v1 ≡ β1 c (4.12) 第4章 34 相対論における速度の合成則 全く同様に Σ0 → Σ00 のローレンツ変換は Ã ct00 x00 ! Ã = cosh θ2 − sinh θ2 − sinh θ2 cosh θ2 !Ã ct0 x0 ! (4.13) と書ける。ここで v2 ≡ β2 . c よって、(4.11) と (4.13) を組み合わせれば (4.14) tanh θ2 = Ã ct00 x00 ! Ã = cosh θ2 − sinh θ2 − sinh θ2 cosh θ2 ! Ã · cosh θ1 − sinh θ1 − sinh θ1 cosh θ1 !Ã ct x ! (4.15) と書ける。 ここで、下の演習 6 の (1) に与えられた (4.10) と同様な関係式を用いる と、空間回転の場合の関係式(4.9)と同様に Ã ! Ã cosh θ2 − sinh θ2 cosh θ1 − sinh θ1 · − sinh θ2 cosh θ2 − sinh θ1 cosh θ1 Ã ! cosh(θ1 + θ2 ) − sinh(θ1 + θ2 ) = − sinh(θ1 + θ2 ) cosh(θ1 + θ2 ) ! (4.16) が得られる。 よって、結局 (4.15) は Ã ct00 x00 ! Ã = cosh(θ1 + θ2 ) − sinh(θ1 + θ2 ) − sinh(θ1 + θ2 ) cosh(θ1 + θ2 ) !Ã ct x ! (4.17) と書ける。 Σ から Σ00 へのローレンツ変換のラピディティーを θ とする。即ち、Σ から見た Σ00 の速度を v とし tanh θ = v ≡β c (4.18) とすると、(4.17) は θ が θ = θ1 + θ2 (4.19) と足し算で表されることを示している。即ち、相対論において速度の合 成を行うと 「速度そのものは単純な足し算にはならないが、ラピディティーに関し 4.2. 双曲線関数を用いる方法 35 ては単純な足し算になる」 ということが言えるのである。 ここで(4.19)の両辺の tanh を考え、また、三角関数の場合とよく似 た演習 6 の (2) に与えられた関係式 tanh(θ1 + θ2 ) = を用いると tanh θ = tanh θ1 + tanh θ2 1 + tanh θ1 tanh θ2 tanh θ1 + tanh θ2 1 + tanh θ1 tanh θ2 (4.20) (4.21) が得られるが、(4.12)、(4.14)、(4.18) を用いてこれを書き直せば β= β1 + β2 1 + β1 β2 → v1 + v2 v = c v1 cv2 c 1+ c c (4.22) となる。これは、既に求めた速度の合成則(4.6)に他ならない。 (演習 6)“ 双曲線関数 ”sinh θ、cosh θ に関する以下の関係式が成立する ことを示しなさい。 (1) (i) cosh θ1 cosh θ2 + sinh θ1 sinh θ2 = cosh(θ1 + θ2 ) (ii) sinh θ1 cosh θ2 + cosh θ1 sinh θ2 = sinh(θ1 + θ2 ) (2) tanh(θ1 + θ2 ) = (演習 7) 速度の合成則 v= tanh θ1 + tanh θ2 1 + tanh θ1 tanh θ2 v1 + v2 1 + v1c2v2 を用いて以下に答えなさい。 (1) v2 = c であれば v = c であること(光速度不変)を示しなさい。 (2) v1,2 < c であれば v < c であること(合成しても決して光速度を超え ないこと)を示しなさい。 37 第5章 時空の概念と時空ダイア グラム 相対性理論では、時間はもはや絶対的ではなく、位置座標同様に、慣性 系に依って変化する。また、ローレンツ変換の下で、例えば(3.30)に見 られる様に ct と x、つまり時間と空間座標は互いに混合 (mix) する。そ こで、3 次元空間に時間も含め、 「時空(space-time)」 というものを考える。空間は点の集合であり、各点は (x, y, z) という座標 で表される。同様に、(ct, x, y, z) で表される “点”の集合である一種の“ 空 間 ”を考えることが出来る。これを “時空”と言う。4つの数のセットで 点が表されるので時空は4次元的であり 「4 次元時空」 とも言われる。 ある慣性系、例えば Σ から見て、時刻 t に場所 (x, y, z) で起きた事象 (event) は (ct, x, y, z) を座標とする4次元時空の一点で表される。こうし た事象を視覚的に表示するために、 「時空ダイアグラム (space-time diagram)」 というものを考えると便利である。簡単の為に、空間を一次元に限定し よう。例えば質点が x 軸上を運動する場合、この質点の運動は、横軸に x 座標を縦軸に ct 座標をとったグラフを用いて表される。ある時刻に質 点がある位置にいたとすると、その事象はこのグラフ上の一点で表わさ れ、質点が運動するとグラフ上に線を描くことになる。これを 「世界線」 と言う。等速運動の場合には世界線は直線になる。この様なグラフを時 空ダイアグラムという。 例えば、x 軸上を伝播する光(閃光)を考える。この光の事象は ct = x を満たすので、その伝搬を表す世界線は傾き π4 の直線、別の言い方をす ると ct, x 軸の角の2等分線となる(図 5.1 参照)。 第 5 章 時空の概念と時空ダイアグラム 38 図 5.1: 閃光の伝播を表す時空ダイアグラム 所で、前述べた様に x − y 平面上の空間回転とローレンツ変換は似た ような変換であると言えるが、実は 空間回転 (x, y) → (x0 , y 0 ): 直交座標系 → 直交座標系 ローレンツ変換 (x, ct) → (x0 , ct0 ): 直交座標系 → 斜交座標系 という違いもある。これはローレンツ変換では光速度は不変なので、光 の伝播の世界線は、変換後も ct0 , x0 軸の角の2等分線である必要がある からである(図 5.2 参照)。 では、変換後の座標軸がどの程度傾くか求めてみよう。ct0 の軸上の事 象は x0 = 0 で表される。即ち、ローレンツ変換の式より、Σ から見た直 交座標で考えると c x0 = 0 → x − ut = 0 → ct = ( )x u (5.1) という直線で表される。 (演習 8) (5.1) と同様にして、x0 軸上の事象を Σ から見た時の直線の方 5.1. 時空ダイアグラムを用いた、「同時性の破れ」の理解 39 図 5.2: 直交座標から斜交座標への変換と閃光の伝播 程式を求め、確かに ct0 , x0 軸は、傾き π4 の直線 ct = x について線対称に 成っていることを示しなさい。 5.1 時空ダイアグラムを用いた、 「同時性の破れ」 の理解 時空ダイアグラムを用いて考えると、色々な相対論における不思議な 事柄を直感的に理解できる。 ここでは、 「同時性の破れ(同時性の喪失)」について考えて見よう。古典 物理のガリレイ変換では時間は絶対であり t = t0 なので、ct = 0 ↔ ct0 = 0 であり x 軸と x0 軸は完全に重なって居る。しかし、ローレンツ変換の大 きな特徴は x 軸と x0 軸は互いに傾いている事である。この為に、、例え ば Σ0 系で、同時にしかし空間的に異なる点で起きる二つの事象は x0 軸 に平行な直線上の2点で表されるが、x0 軸が傾いているため、これらの 40 第 5 章 時空の概念と時空ダイアグラム 事象の Σ 系における時刻 t が異なることは明らかである。例えば図 5.3 の 原点 O(ct0 = x0 = 0) と点 P(ct0 = 0, x0 = 1)で表される二つの事象は、 どちらも x0 軸上にあるので t0 = 0、即ち Σ0 から見ると同時に起こる事象 である。 一方 Σ から見ると、これらは図 5.3 に示されたように、t = 0, t = tP という二つの異なる時刻で起きており、同時ではないことが直ぐ分かる。 図 5.3: 直交座標と斜交座標の関係 5.2 斜交座標の目盛の尺度 空間回転の場合には、(x, y) 座標系から (x0 , y 0 ) 座標系に変換しても、一 目盛の長さは同じで変化しない。例えば点 (1, 0) と原点との距離は、回転 では原点からの距離は不変であるから当然変化しない。 しかしながら、ローレンツ変換においては、変換後の (ct0 , x0 ) 斜交座標 系の一目盛の長さは、(ct, x) 座標系の一目盛の長さと同じではない事に 5.2. 斜交座標の目盛の尺度 41 注意しよう。例えば、図 5.3 の点 P は (ct0 , x0 ) = (0, 1) の点であり、斜交 座標では OP が一目盛となるが、これを (ct, x) の直交座標系から見ると、 OP の長さは決して 1 ではない。実際 ct0 = 0, x0 = 1 をローレンツ逆変換 の式(3.5)に代入すると 1 x= q 1− ct = q u2 c2 ( uc ) 1− u2 c2 =γ = βγ (5.2) となり、従って直交座標系における OP の長さは q v u u1 + 2 2 (1 + β )γ = t q γ2 + (βγ)2 = 1− u2 c2 u2 c2 (5.3) となる事が分かる。この様に Σ 系と Σ0 系では一目盛の尺度にズレが在る ことに注意する必要がある。 例えば、前節で述べた「同時性の破れ」を表す ctP は Σ 系における座 標なので、 (5.3)の長さに、sin θ0 (θ0 は直交座標系から見た x0 軸の傾きの 角)を掛けたものになる。ここで x0 軸の傾きが u tan θ0 = = β (5.4) c であることから 1 1 sin θ0 = q =q 1+ 1 + cot2 θ0 が得られる。よって ctP → v u u1 + =t u2 c2 2 × sin θ0 1 − uc2 ( cu2 ) tP = q 2 1 − uc2 v u u1 + =t 1− u2 c2 u2 c2 (5.5) c2 u2 1 ×q 1+ c2 u2 (u) =q c 2 1 − uc2 (5.6) となるが、これは (2.9) において Lt0 = 1 としたものにちょうど等しい事 が分かる。 全く同様にして ct0 軸上の一目盛も直交座標系からみると(5.3)の長 さになる事が分かる。例えば、図 5.3 の点 Q は (ct0 , x0 ) = (1, 0) の点であ るが、直交座標系から見ると OQ の長さは(5.3)になる。これは ct0 軸と x0 軸は線対称の関係にあるのだから当然とも言える。 42 5.3 第 5 章 時空の概念と時空ダイアグラム ローレンツ収縮再考 3章の終りの方で、Σ と Σ0 がそれぞれ全く同等の棒を持っていて(両 者が静止している時の長さが LΣ = LΣ0 = L0 )、Σ に対して Σ0 が運動を 始めると、互いに他の観測者の棒のほうが短く見え、一見矛盾している、 といった事を議論した。ここでは、時空ダイアグラムを用いて、実際に は両者の主張は矛盾していないことを説明しよう。 図 5.4 を見よう。この図で、Σ の持っている棒は、Σ に対して静止して いるので、その両端の事象は、原点 O と点 P を通り、ct 軸に平行な 2 本 の直線(一本は ct 軸そのもの) で表される。一方 Σ0 の持っている棒は、Σ に対して速度 u で運動するので、その両端の事象は、原点 O と点 P’ を通 り、ct0 軸に平行な 2 本の直線(一本は ct0 軸そのもの) で表される。Σ か ら見た棒の長さは、同時刻 t = 0 における棒の両端の x 座標の差で表され るので、点 P および点 P’ の x 座標が Σ から見た Σ および Σ0 の棒の長さ となる。よって、点 P の x 座標は L0 であり、点 P’ の x 座標はローレン q u2 ツ収縮の為に 1 − c2 L0 である。 一方、Σ0 から見た棒の長さは、同時刻 t0 = 0 における棒の両端の x0 座 標で表されるので、図の点 Q および点 Q’ の x0 座標が Σ0 から見た Σ およ び Σ0 の棒の長さとなる。よって、点 Q’ の x0 座標は L0 であり、点 Q の q 2 x0 座標はローレンツ収縮の為に 1 − uc2 L0 となる。 ここで注意すべきことは P の x 座標より P’ の x 座標が小さい、という 事と、点 Q の x0 座標より点 Q’ の x0 座標のほうが大きいという事が互い に矛盾していないという事である。これは Σ0 の座標軸が傾いているため に可能となるのである。上で述べた P, P’,Q,Q’ の座標の間の大小関係が 図形的にもつじつまが合っている事は、前節で述べた目盛の尺度を考慮 すると具体的にも確かめられる。以下の演習問題を参照の事。 q (演習 9)図 5.4 の点 Q の x0 座標を 1 − uc2 L0 だとする時、直交座標系で 見た OP の長さが L0 となり、確かに点 P の x 座標に一致していてつじつ まが合っている事を説明しなさい。 2 5.3. ローレンツ収縮再考 図 5.4: 時空ダイアグラムを用いたローレンツ収縮の理解 43 45 第6章 相対論的な力学 ニュートンの運動方程式は20世紀始めまで自然を正しく記述してい る、と考えられて来たが、その立脚するガリレイ変換、それから導かれ る(古典的な)速度の合成則は、アインシュタインにより提唱された(特 殊)相対性理論では、ローレンツ変換と新しい速度の合成則により取っ て替わられることに成った。これに伴い、ニュートン力学は変更を余儀 なくされ、相対論的な力学の構築が必要となった。 (マクスウェルの電磁 気の理論は変更の必要が無いことに注意しよう。)この章では、相対論的 な力学とはどの様なものかを議論する。 6.1 (あたかも)速さと共に増大する質量 ニュートンの運動方程式は、運動量の時間変化が力であること、 d~p F~ = dt (~p = m~v ), (6.1) を言っているとも言えるが、ここで質量 m は当然のように定数であると している。相対論でも (6.1) の関係自身は成り立つ。唯一の、しかし重大 な相違点は、相対論では、 (あたかも)質量が物体の速さ v と共に増大す る様に見える、という事である。きちんとした導出は後で行う事にして 結果だけを述べると、速さ v で運動する物体の運動量は、古典論の時と 同じく p~ = m~v , (6.2) の様に与えられるが、物体の質量は m0 m= q (v = |~v |) 2 1 − vc2 (6.3) の様に、あたかもガンマ因子の分だけ増大する様に見える。ここで m0 は 定数で、物体が静止している時 (v = 0) の質量という意味で「静止質量」 と呼ばれる。 第6章 46 相対論的な力学 (N.B.) 物体の質量が (6.3) の様に与えられるとすると、それは物体の速さ v に 依存して変化し、従って慣性系に依って変化してしまう。例えば物体と 同じ速度で運動する慣性系から見ると、物体は静止して見えるから、そ の質量は m0 となる。しかし、質量というものは慣性系に依らない、つま りローレンツ変換の下で不変な物理量(“ローレンツ・スカラー”)であ ると考えられており、厳密には m0 が本来質量と呼ぶべきものである。つ まり(6.3)の m は、あたかも速さと共に質量が増大する様に見える、と いう事を言っているに過ぎないが、このノートでは、その辺はあまり気 にせず、“速さと共に増大する質量”といった言い方を用いることにする。 しかしそうした質量の増加は日常生活では殆ど観測不可能である。例 えば、時速 200 Km の新幹線の質量の、静止質量に対する増加の割合は たった 1.8 × 10−14 である。こうしたわずかな効果が、理論的考察によっ てどのように発見されたのかを考えて行こう。 まず、(6.3) の導出は後程するとして、運動方程式 (6.1) からどのような 結論が得られるか考えてみよう。 例えば、同じ質量、同じ速さの二つの物体が滑らかな床の上において ある直線上で正面衝突したとすると、二つの物体は全く同等であるので、 当然、衝突後も二つの物体は互いに同じ速さで遠ざかって行くであろう (更には、エネルギー保存則から衝突前の速さとも同じである)。そうで ないと、二つの物体を入れ替えた時に違う散乱に見えてしまう。よって、 質量は速度に依存するにせよ、運動量保存則、今の場合は散乱の前後で 全運動量が ~0 という事、が成立っているはずである。運動量変化は力な ので、これは作用反作用の法則(ニュートンの運動の第3法則)がやは り成立することを言っている。即ち、 d d~p1 d~p1 (~p1 + p~2 ) = + = F~1 + F~2 = ~0 dt dt dt (6.4) の関係式は相対論でも成立する。ここで 1,2 の添え字は二つの物体のそ れぞれを表す。 (6.3) で与えられる物体の速さに依る質量変化の様子を、物体の速さ v が光速度 c に比べてずっと小さい (|v| ¿ c) 場合、つまり古典物理に対応 する場合についてみてみよう。この場合には 1 1 3 (1 − x)− 2 = 1 + x + x2 + . . . 2 8 (|x| ¿ 1) (6.5) 6.2. 質量とエネルギーの等価性 47 2 というテーラー展開を用いると、| vc2 | ¿ 1 より m0 m= q 1− v2 c2 = m0 (1 + 1 v2 3 v4 1 1 + 4 + . . .) ' m0 + m0 v 2 2 2 2c 8c 2 c (6.6) のように近似される。 さて、ここで両辺を c2 倍してみると 1 mc2 ' m0 c2 + m0 v 2 2 (6.7) となる。つまり、mc2 は静止していた時と比べ、古典物理学における運 動エネルギー 12 m0 v 2 の分だけ増加する事になる。 6.2 質量とエネルギーの等価性 こうしたことから、アインシュタインは次のような着想に到達した: 「運動する物体の持つエネルギーは、 E = mc2 (6.8) と表される。」 これは物体の質量とエネルギーが(次元は違うものの)本質的に同等で あるという 「質量とエネルギーの等価性」 を言っている事になる。 E = mc2 = m0 c2 + 12 m0 v 2 + . . . の最初の項 m0 c2 は物体が静止してい ても持つ “本来的な”エネルギー 「静止エネルギー (rest energy)」 と呼ばれる。古典論の形式的極限 c → ∞ でも、この静止エネルギーが消 えないので、古典論でも本来このエネルギーは存在していたはずである。 では、なぜ古典物理学では、この膨大なエネルギー(核分裂等で生じる 膨大な運動エネルギーは静止エネルギーの減少が起源)を無視して支障 が無かったのであろうか?それは古典論では、化学反応における「質量 保存則」にみえる様に、静止質量の総和は反応の前後で決して変化しな い、と考えられていたからである。大きなエネルギ―でも反応の前後で 変化しなければ無いのと同じなのである。例えば、非常に高度の高いヒ マラヤの様な所のゲレンデを滑るスキーヤーは、大きな(重力による)位 第6章 48 相対論的な力学 置エネルギーを持ってはいるが、ゲレンデの高度が変化しない限り運動 エネルギーを得ることは無く、位置エネルギーをゼロと考えても差し障 りないのと状況は似ている。しかし、ヒマラヤから下に下れば、スキー ヤーは大きな運動を得ることになる。これと同様に、原子核の反応、例え ば重い原子核がより軽いいくつかの原子核に壊れる「核分裂」において は、静止質量の総和が反応前に比べて減少することが起き得るので、大 きな運動エネルギーが「解放される」。これが原子力エネルギーの原理で ある。 6.3 速度の関数としての質量 この節では、いよいよ相対論でも成立する運動量保存則に基づいて (6.3) の関係を導出しよう。まず、質量が速度によって変わり得ることを前提と すると、運動量は p~ = m(v)~v (6.9) と書ける。ここで m(v) は物体の質量が物体の速さ v = |~v | に依存するこ とを示している。 思考実験として、“宇宙玉突きゲーム”を考えよう。重力の無い宇宙空 間で、アルバートとヘンリーが宇宙船に乗っていて、二つの宇宙船は逆向 きの一定速度で互いに近づくとする。アルバートとヘンリーは、それぞ れ全く質量の同じ等質の二つの球 A, B を持っており、宇宙船の進行方向 と垂直に A, B を投げ出して玉突きをするものとする。宇宙に静止してい る(“傍観者”の)慣性系 Σ0 から見ると、図 6.1 の様に、球 A,B は x − z 平面内で弾性散乱をし、衝突前と同じ速さで、それぞれ元の宇宙船に戻 るものとする。 次にアルバートからこの玉突きゲームを見るとどう見えるか考えよう。 アルバートから見た時の、投げ出された A の “鉛直方向”(z 方向) の速度 成分を −w とする。アルバートから見てヘンリーの宇宙船が自分に対し て u の速さで近づくとすると、B の “水平方向”(x 方向)の速度成分は −u となる(図 6.2 参照)。 また、アルバートから見た B の鉛直方向の速度成分は s u2 w (6.10) c2 である。これは何故であろうか?それは、アルバートに対してヘンリー の宇宙船は水平方向に速度 −u で運動しているので、アルバートからみ 1− 6.3. 速度の関数としての質量 49 図 6.1: 傍観者の慣性系 Σ0 から見た宇宙玉突きゲーム た時には B の上下運動の時間間隔は、A の上下運動の時間間隔に比べて (動いている時計が遅れるのと同様に)γ = q 1 2 倍に伸びるからであ 1− u2 c る。一方アルバートから見ても A と B の鉛直方向の往復距離は全く同じ なので(鉛直方向のローレンツ収縮は起きないので)、アルバートからみ q 2 た B の鉛直方向の速度成分は、A の速度の大きさ w の γ1 = 1 − uc2 倍 になるのである。 またアルバートからみた B の速さを v とすると、ピタゴラスの定理か らv は s u2 u2 w 2 v 2 = u2 + ( 1 − 2 w)2 = u2 + w2 − 2 (6.11) c c で与えられる。よって、アルバートから見た鉛直方向の(水平方向の運 動量保存則は自明なので)運動量保存則を用いると s s u2 u2 −m(w)w + m(v) 1 − 2 w = m(w)w − m(v) 1 − 2 w → c c 第6章 50 相対論的な力学 図 6.2: アルバートから見た宇宙玉突きゲーム s u2 m(w)w = m(v) 1 − 2 w → c m(w) = m(v) s 1− u2 c2 (6.12) の関係が出る。ここで特に w を十分小さくとると m(w) → m0 , m(v) → m(u)((6.11) より)と置き換えられるので m0 = m(u) が得られる。即ち s 1− m0 m(u) = q 1− u2 c2 u2 c2 (6.13) (6.14) が導出されるが、これは (6.3) で v → u としたものに等しい。本来の目 的は (6.12) を満たす関数を求める事であったが、一旦(6.14)のように関 数形が決まると、w が小さい場合に限定しなくても一般に (6.12) の関係 が成立することを示すことが出来る (演習 10 を参照) 。 (演習 10)(6.14) の関数形を仮定した時に、一般に (6.12) の関係が成立す 6.4. アインシュタインの関係式 51 る事を、(6.11) を用いて確かめなさい。 6.4 アインシュタインの関係式 これまでの結果をまとめると、物体の運動量とエネルギーは (6.2)、(6.8) より p~ = m~v E = mc2 (6.15) で与えられる。ただし m は m0 と v = |~v | を用いて((6.3) を参照) m= q m0 1− v2 c2 (6.16) と書ける。 (6.15) より、エネルギー E を運動量の大きさ p = |~p| と m0 (および c) を用いて表すと, 次の重要な関係式が導かれる(各自導出を試みる事) : q E= c2 p2 + m20 c4 . (6.17) この関係式は 「アインシュタインの関係式」 と呼ばれる。あるいは (6.17) を2乗した E 2 = c2 p2 + m20 c4 (6.18) を用いる場合もある。 例えば質量 m0 がゼロでない物体が静止している時には、v = 0 従って p = 0 なので、(6.17) より E = m0 c2 (6.19) という「静止エネルギー」が得られる。 (6.17) は、(6.2)、(6.8) から得られる一つの関係式であるが、もう一つ独 立な関係式を導くことが出来る。それは、(6.2) の絶対値をとった p = mv の c 倍を (6.8) で割って得られる v cp = E c (6.20) 第6章 52 相対論的な力学 という関係式である。 仮に質量 m0 = 0 の粒子があったとすると、(6.17) より E = cp (6.21) という単純な比例関係が得られる。また、これを (6.20) に代入すると v=c (6.22) が得られる。即ち、 「質量ゼロの粒子は、常に光速度 c で運動する」 という重要な結論が得られる事になる。例えば、アインシュタインによっ て提唱された光の粒子である “光子”は質量ゼロで光速度で運動し(光の 粒子なので当然ではあるが)、質量が無視出来る程小さなニュートリノ と呼ばれる素粒子は小さなエネルギーでもほぼ光速度で運動することに なる。 所で、m0 = 0 とすると、一見(6.16)より m = 0 となり、従って (6.2)、 (6.8)より p = E = 0 となって意味のない結果に成る。実際には、m0 = 0 の時には (6.22)で得られたように v = c となるので、(6.16) は 00 の “不 定形”になり、p, E はゼロとはならないのである。 この様に、(6.2)、(6.8) においては m0 = 0 の時には特別な注意が必要 であるが、これに対し、(6.17)、(6.20) は m0 = 0 の場合にも特に問題な く使える、という利点がある事に注意しよう。 6.5 4 元運動量と 4 元力 相対性理論においても、運動方程式はニュートン力学と同じ形をした (6.1) で与えられる、と述べた。しかし正確には、(6.1) は 3 成分のベクト ルの関係式であるが、相対性理論の運動方程式は(6.1)を一般化した 4 成分(4 元)のベクトルの式に拡張される。これに伴い、運動量や力のベ クトルも、4 成分を持った 「4 元運動量」、「4 元力」 に拡張されるのである。この節では、こうした 4 元ベクトルを用いた相 対論的な運動方程式に関して解説する。 まず、ニュートン力学では、多くの物理法則は (3 元) ベクトル = (3 元)ベクトル という形で書かれるが、その意味を少し深く考えてみよう。 6.5. 4 元運動量と 4 元力 53 古典物理学において「ベクトル」というのは、単に 3 つの数字の組で 表されるもの、というのではなく、 「空間回転の下で、位置ベクトルと同じように変換するもの」 という重要な意味がある。この為に、ベクトル = ベクトルという形で書 かれた物理法則は、空間回転の下でも不変なのである。 例えば、有名な F~ = m~a (6.23) は(3 成分の)ベクトル = ベクトルという形で書かれているが、座標系 の回転により力と加速度が F~ 0 , a~0 の様に変換され変化したとしても、相 変わらず F~ 0 = ma~0 (6.24) という (6.23) と同じ形の運動方程式が成り立つのである。それは、直感 的には、力ベクトルも加速度ベクトルも空間回転の下で位置ベクトルと 全く同様に変換されるので、変換前に同一の二つのベクトルであったも のは変換後もやはり同一のものになる、ということであるが、これを少 し数学的に述べてみよう。 まず、空間回転による物体の位置ベクトルの変換 ~r → r~0 は線型変換な ので、回転行列 O を用いて r~0 = O~r (6.25) の様に書かれる。ここで位置ベクトル ~r 等は 3 成分の縦ベクトルであり、 O は 3 行 3 列の回転行列(数学的には “直交行列”)である。x − y 平面内 の回転に関しては(3.33) の様な 2 行 2 列の直交行列で書かれるが、これ を 3 次元空間の場合に一般化したものが (6.25) である。 これに伴い、速度ベクトルの変換も v~0 = O~v (6.26) の様に、位置ベクトルの変換 (6.25) と同様に変換することが分かる。まず ~v = v~0 = d~r dt dr~0 dt (6.27) である事を思い出そう。すると、(6.25) の t 微分を考えると、行列 O は時 間に依らないので (空間回転後も慣性系であるためには、回転角は時刻に 第6章 相対論的な力学 dr~0 d d~r v~0 = = (O~r) = O = O~v dt dt dt (6.28) 54 依らない必要がある) すなわち(6.26)が導かれる。 加速度ベクトルについても全く同様にして a~0 = O~a (6.29) が得られる事になる。力のベクトルも同様に F~ 0 = OF~ (6.30) と変換する。逆に言えば、ベクトルというのは、この様に同一の回転行 列 O によって、位置ベクトルと同様に変換するものである、と言えるの である。すると、(6.23) の両辺に左から行列 O を掛け算することで OF~ = mO~a → F~ 0 = ma~0 (6.31) の様に (6.24) が得られる事が分かる。 この様に、ニュートン力学においては、空間回転の下で物理法則はそ の形が変わらず、その意味で「物理法則は不変」であると言えるが、そ れは、物理法則がベクトル=ベクトルという形で書かれている事で自動 的に保証されている、という事になる。この様に物理法則が回転不変性 を持つのは、物理法則に現れる両辺のベクトルのそれぞれは空間回転の 下で変換するものの(不変ではない)、どちらも同じ様に変換するからで あるが、こうした性質を 「共変性(covariance)」 と言う。共変性は、物理法則の不変性を保証する重要な概念なのである。 実際には、スカラー = スカラー (スカラーとは一つの数で表され、空間 回転の物で不変な物理量の事)、あるいはテンソル=テンソル(テンソル とはベクトルを拡張したもの)といった形の物理法則もある。 さて、相対性理論では、その指導原理として、 「どの慣性系から見ても物理法則は不変である」(相対性原理) というものがあるが、既に述べた様に、異なる慣性系の間の変換は、時 刻 t と空間座標 (x, y, z) の間の一種の “回転”とも見なさるローレンツ変 換により記述される。よって、相対論においては、物理法則はローレン ツ変換の下で不変である必要がある。 6.5. 4 元運動量と 4 元力 55 空間回転の下で、3 つの成分 (x, y, z) を持つ 3 元の位置ベクトルが (6.25) の様な変換を受けるのと同様に、ローレンツ変換は、時刻 t と空間座標 (x, y, z) の間の一種の “回転”と見なせる事から、ローレンツ変換は、t と 空間座標 (x, y, z) を合わせた 4 元ベクトル (ct, x, y, z) に関する ct ct0 0 x x 0 = L y y 0 z z (6.32) という線型変換で表される。ここで L はローレンツ変換を表す 4 行 4 列 の行列である。特に x 軸方向に運動する慣性系へのローレンツ変換の場 合には、4 元の内 y, z 座標は変換されず(y 0 = y, z 0 = z )、ct, x のみが 変換されるので、L は実質的に (3.39) の様な 2 行 2 列の行列で書ける。 ちょうど、(x, y, z) が空間の一点を表す位置ベクトルの成分表示である ように、4 元ベクトル (ct, x, y, z) は 4 次元時空間(space-time)の一点を表 す、一種の “位置ベクトル”と見なせる。すると、古典物理で物理法則が、 3 元の位置ベクトルと同様に変換するベクトルを用いて表される様に、相 対論での物理法則は、ローレンツ変換の下で(時空点を表す)(ct, x, y, z) と同様に変換する 4 元ベクトルの間の等式で表される必要があることに なる。 こうした考察から、上述の様に (6.1) を、4 元ベクトルに関する式に拡張 する必要があることが分かる。その際に注意すべき事は次の二点である: (a) (6.1) において、運動量 p~ および力 F~ はいずれも 3 元ベクトルなので、 これらを “4 元運動量”、 “4 元力” に拡張する必要がある。 p (b) (6.1) の時間微分 d~ において、古典物理の場合には、t 従って dt は空 dt 間回転に関係せず回転の下で不変だったので、p ~ 従って d~p が 3 元ベクト d~ p ルであれば、その時間微分 dt も 3 元ベクトルとして振る舞い、問題無かっ た。しかしながら、相対論においては時間は絶対的ではなく、ローレン ツ変換の下で変換してしまうので、dt はローレンツ変換の下で不変では ない。その為、微分しても相変わらず 4 元ベクトルとして振る舞うよう なものに置き換える必要がある。 これらの問題点はどのように解決するか、(a)、(b) それぞれについて 順次考えて行こう。 まず、(a) についてであるが、4 元運動量に関しては、まず結論を述べ 第6章 56 相対論的な力学 ると、時空座標 (ct, x, y, z) の空間部分に相当する後ろの 3 成分の部分に は、(6.1) に現れる相対論的な運動量 p ~ = m~v = m0 γ~v を用い、ct に対応 E する “時間成分”pt については c = mc = m0 γc を用いれば良い (E は物 体のエネルギー) ことが分かる: 4 元運動量 : E (pt , p~) = ( , px , py , pz ). c (6.33) pt として Ec を用いたことの正当性については、ローレンツ変換の下で (6.33) の 4 元ベクトルが時空座標と同様に変換することを確認すれば確 かめされるが、ここでは、もう少し簡便な方法で確かめることにしよう。 ローレンツ変換の数学的導出の部分で述べたように、4 元の時空座標につ いては、(3.31) で定義される “世界間隔” はローレンツ変換の下で不変で あった: −(ct0 )2 + (x02 + y 02 + z 02 ) = −(ct)2 + (x2 + y 2 + z 2 ). (6.34) これとまったく同様に 4 元運動量についても 02 02 2 2 2 2 −(p0t )2 + (p02 x + py + pz ) = −(pt ) + (px + py + pz ) (6.35) が言えることが分かる。それは、「アインシュタインの関係式」(6.17) を 用いると −(pt )2 + (p2x + p2y + p2z ) = − E2 + p2 = m20 c2 c2 (6.36) という定数となり、ローレンツ変換の下で不変であるからである。これ は、4 元運動量が、ローレンツ変換の下で時空ベクトルと同様に変換する ことを強く示唆している。 ~ の替わりに、ローレンツ変換の下で時空座標、 同様に、力についても F 4 元運動量と同様に変換する「4 元力」 (ft , fx , fy , fz ) (6.37) を用いることにする。4 元力の物理的な意味、特に古典物理で扱っていた ~0 と書くことにする) との関係については後で議 力のベクトル (これを F 論する。 次に、(b) について考えよう。ちょうど上の (6.34) で述べたように、時 刻 t はローレンツ変換の下で不変ではないが、世界間隔についてはロー 6.5. 4 元運動量と 4 元力 57 レンツ変換の下で不変である事に着目する。時空ダイアグラムにおいて 隣接する二つの事象があるとする。それら間の(無限小の)時間間隔を dt、(無限小の) 空間座標(位置ベクトルの成分)の差を (dx, dy, dz) とす る。すると、二つの事象の間の世界間隔 dS は dS 2 = −(cdt)2 + (dx2 + dy 2 + dz 2 ) (6.38) で定義され、これはローレンツ変換の下で不変である。そこで “固有時” τ というものと考えることにする。固有時は、世界間隔を c で割って時間の 次元にしたものと定義する。即ち、 dS 2 = −(cdτ )2 = −(cdt)2 + (dx2 + dy 2 + dz 2 ) → s dτ = s s dx2 + dy 2 + dz 2 dx2 + dy 2 + dz 2 dt2 − 1 − = dt c2 c2 dt2 = dt 1 − v2 1 = dt 2 c γ (6.39) で定義される。ここで、速度ベクトルが ~v = ( dx , dy , dz ) で与えられるこ dt dt dt と、及びガンマ因子 γ = q 1 2 を用いた。 1− v2 c 固有時の意味を考えて見よう。世界間隔 dS 同様に、固有時の間隔 dτ も慣性系に依らない。そこで特に、今考えている時刻 t の瞬間において、 たまたま物体と同じ速度で運動する慣性系 Σ0 があったとすると、Σ0 か v ら見ると、瞬間的に物体の速度はゼロなので(加速度 d~ は一般にゼロで dt はない)、(6.39) において v = 0, γ = 1 の場合に相当し、従って Σ0 から 見た二つの事象の時間間隔を dt0 とすると、dτ = dt0 となる。即ち、 「固有時とは、物体と一緒に運動する慣性系から見た時の時刻」 であり、言わば、物体そのものが持つ時計の刻む、物体固有の時刻であ る、と言える。こう考えると、(6.39) の dτ = γ1 dt 即ち dt = γdτ の関係式 は、「動いている時計の遅れ」と同等のことを表していることが分かる。 こうして、結局、相対論的な運動方程式は d (pt , px , py , pz ) = (ft , fx , fy , fz ) → dτ dpt dpx dpy dpz , , ) = (ft , fx , fy , fz ) ( , dτ dτ dτ dτ で与えられることになる。 (6.40) 第6章 58 相対論的な力学 この運動方程式の意味する所を最後に考察しよう。特に古典物理学と の対応関係について注意することにする。先に述べたように、ニュート ン力学での運動方程式は 3 元ベクトルに関するものなので、(6.40) の後ろ の 3 成分の部分(“空間部分”)がこれに対応すると思われる。そこで、そ の部分を抜き出してみると ( dpx dpy dpz , , ) = (fx , fy , fz ) dτ dτ dτ (6.41) となるが、p ~ = m~v = m0 γ~v および dτ = γ1 dt (6.39) の関係に注意すると、 (6.41) の左辺は d(m0 γ~v ) γ (6.42) dt となる。ここで、特に上述の物体と同じ速度で運動する慣性系 Σ0 から見 ると、(瞬間的に) 物体の速度はゼロなので古典物理の結果に帰着すること が期待される。実際、この時には v = 0、従って γ = 1 となるので、(6.42) は、古典物理の場合の運動方程式の左辺 d(mdt0~v) = m0~a と一致することが 分かる。よって、(6.41)の右辺も古典物理の場合の力に帰着するはずな ~0 に ので、Σ0 から見ると、4 元力の “空間成分”は、古典物理の場合の力 F 一致する (fx , fy , fz ) = (F0x , F0y , F0z ). (6.43) t では、Σ0 から見た (6.40) の時間成分の間の関係式 dp = ft はどの様な dτ 意味を持つのであろうか?古典物理では力ベクトルは 3 元ベクトルで時 間成分は存在しないので ft = 0 となり、この関係式は 0 = 0 という自明 t な式に成るように予想される。実際、左辺の dp を計算してみると dτ dpt γ dE d 1 = = γm0 c ( q dτ c dt dt 1 − )= 2 v c2 γm0 v 2 3 dv (1 − 2 )− 2 v c c dt (6.44) となるが、Σ0 から見ると v = 0 なので、確かに (6.44) はゼロとなること が分かる。 この様に Σ0 から見ると 4 元力は (0, F0x , F0y , F0z ) (6.45) と成る。すると、物体が静止しているのではなく速度 ~v で運動している 様に見える様な一般の慣性系 Σ から見た時の 4 元力 (ft , fx , fy , fz ) は、 Σ0 → Σ のローレンツ変換の関係式により得られる。簡単のために、考 6.5. 4 元運動量と 4 元力 59 えている瞬間に物体は x 軸方向に速さ v で運動しているとすると、この ローレンツ変換は、Σ は Σ0 に対して x 軸方向に −v で運動するので、 (3.39)で β → −β とした時のローレンツ変換と同様に Ã ft fx ! Ã = γ βγ βγ γ !Ã 0 F0x ! (6.46) となる。これから、4 元力の “時間成分”ft は ft = βγF0x (6.47) であり、もはやゼロではなくなる。この場合、相対論的な運動方程式 (6.40) の “時間成分”は dpt γ dE v dE = ft → = γF0x → = F0x v dτ c dt c dt (6.48) という関係式を与える。ここで β = vc を用いた。(6.48) は 「エネルギーの時間的変化率 = 仕事率」 という、力学で良く知られた関係式に他ならない事が分かる。 こうして、相対論における 4 元ベクトルを用いた運動方程式は、ニュー トン力学における運動方程式をローレンツ変換の下で共変的に成る様に 自然に拡張したものであることが分かる。
© Copyright 2026 Paperzz